低附著路面電動助力轉向系統助力控制研究*
2014-10-11 07:42:00范璐,周兵
汽車工程 2014年7期
范 璐,周 兵
(湖南大學,汽車車身先進設計制造國家重點實驗室,長沙 410082)
前言
電動助力轉向(elcctric power steering,EPS)系統是一種依靠電動機附加助力來輔助駕駛員轉向,以減小轉向力矩的系統。傳統的EPS系統模型中,認為輪胎特性是線性的,從而可以認為等效到轉向柱的阻力矩與轉向角成正比[1-2],但這會使地面的信息,如附著系數等不能及時地反饋給駕駛員。文獻[3]中著重討論了低附著路面上車輛回正性能的提高辦法和回正控制策略,對助力控制涉及較少,也沒有給出具體的控制算法。文獻[4]中綜合考慮了低附著路面助力控制和回正控制,并詳細論述了基于時變滑模變結構控制的回正控制策略,而對于電流修正系數的確定討論較少。
當輪胎在線性區域時,隨著側偏角的增大,輪胎自回正力矩也相應增大。當側偏角超出線性區時,輪胎自回正力矩呈現出減小的趨勢[5]。在高附著系數的路面上,輪胎線性區域很寬,并且側偏角很少進入非線性區域。但在低附著系數路面上時,線性區域很窄,轉向時容易進入非線性區[3]。因此,當汽車在低附著路面上轉向時,輪胎自回正力矩和輪胎與路面間的摩擦力矩的降低會導致轉向阻力矩降低,而此時駕駛員來不及反應,仍按照高附著系數時轉向,會使轉向角過大,容易導致車輛側滑甚至側翻。
本文中設計了一種新型電流補償助力控制器,采用模糊控制確定了與附著系數和車速有關的電流補償系數大小。當附著系數減小時,通過實時估計附著系數的大小,電流補償助力控制器可以使駕駛員施加在轉向盤上的操縱轉矩增大,并且附著系數越小或車速越高,操縱轉矩就越大。這樣提高了駕駛員的路感,有效地防止了危險的發生。
1 EPS系統的數學模型
1.1 轉向系統和電機模型
EPS的總體結構如圖1所示。
轉向系統做了簡化處理[6]。由剛體定軸轉動定律,可得轉向系統動力學方程為
式中:Js為轉向盤和輸入軸轉動慣量;Je為等效輸出軸轉動慣量;Jp為輸出軸和減速機構轉動慣量;Bs為轉向盤和輸入軸阻尼系數;Be為等效輸出軸阻尼系數;Bp為輸出軸和減速機構阻尼系數;Br為齒條阻尼系數;θd為轉向盤轉角;θp為輸出軸轉角;δf為前輪轉角;Td為轉向盤操縱轉矩;Ts為扭矩傳感器測得的轉矩信號;Ta為電機助力矩;Tr為轉向阻力矩;Ks為扭力桿剛度;mr為轉向齒條和車輪的質量;rp為小齒輪半徑;Ge為轉向器傳動比。
助力電機采用直流電機,其模型為
式中:U為電動機電樞端控制電壓;R為電動機電樞電阻;L為電樞電感;I為電動機實際電流;Kb為電動機反電動勢系數;Kz為電動機的電磁轉矩系數;Gm為減速機構傳動比。
1.2 整車非線性模型
不考慮側向風的影響,建立整車坐標系見圖2。
對整車,由X軸方向、Y軸方向和繞Z軸方向受力分析得
式中:Fx為X軸方向的合外力;Fy為Y軸方向的合外力;Mz為繞Z軸方向的合外力矩;mv為整車質量;u為汽車的縱向速度;v為汽車的側向速度;ωr為橫擺角速度;Iz為繞Z軸的轉動慣量。
地面對車輛的作用力,最終都通過輪胎作用于車輛。假設左右前輪的轉向角相等,不考慮車身的俯仰和側傾運動,則其縱向力和側向力相等,分別記為Fxf和Fyf。同理,兩后輪的縱向力和側向力也相等,分別記為Fxr和Fyr。得到
式中:a、b分別為前后軸至質心距離。
由于估算附著系數的需要,計算非驅動輪輪速ωw:
式中r為車輪有效半徑。
1.3 輪胎模型
采用Dugoff輪胎模型[7],由輪胎模型可以很容易地算出單個輪胎的縱向力和側向力。設i=1,2,3,4,分別表示左前輪、右前輪、左后輪和右后輪,則其數學模型為
式中:Cs為輪胎縱向剛度;Cα為輪胎側偏剛度;s為輪胎縱向滑移率;α為輪胎側偏角;λ為輪胎模型變量;μ為附著系數;Fz為單個輪胎垂直載荷。其中,側偏角可由下式[5]計算
式中β為質心側偏角。
1.4 轉向阻力矩的計算
轉向工況時,轉向阻力矩由3部分組成,分別是由側偏力引起的輪胎自回正力矩Mf1、由轉向系自身結構引起的重力回正力矩Mf2、轉向系內摩擦力矩和輪胎與路面之間的摩擦力矩Mf3。由于輪胎接地面前后側向變形不同,使側向力的分布不均,故產生繞Z軸的輪胎自回正力矩,由下式確定:
式中:tm為機械拖距;tp為氣體拖距。重力回正力矩由轉向系定位參數決定,計算公式[8]為
其中:Gf=Fz1+Fz2
式中:Gf為前軸載荷,c為主銷偏移量;φ為主銷內傾角;δfm為兩前輪平均轉角,設兩前輪轉角相同,則δfm= δf。
故轉向時作用于轉向輸出軸的轉向阻力矩為
2 附著系數估算
由于附著系數的改變會影響EPS的助力特性,故須實時準確地估算地面的附著系數。目前國內外對此問題進行了多方面的研究,但大多數是用于制動工況。本文中采用一種基于橫擺角速度和車輪轉速的估算法[9],此方法能很好地運用在轉向工況下,且計算時間短、估計值較準確。
在低附著系數的路面上轉向時,路面作用在輪胎上的縱向力和側向力都較小,因此橫擺角速度也會相應減小,而由于車輪滑轉加劇,車輪轉速會增加。由文獻[9]中的實驗結果可知,車輛在不同附著系數路面上響應值(橫擺角速度和輪速)的不同可以認為是附著系數不同所造成的。首先假設一個初始附著系數,通過整車模型得出此時的橫擺角速度和輪速響應值,記為預測橫擺角速度和預測輪速,若預測響應值與實車試驗所得響應值相等,則此時的附著系數便與真實的地面附著系數相等。因此分別將預測響應值和實測響應值的偏差輸入兩個PID控制器,控制器的輸出經過規范化計算后反饋給參考模型作為附著系數輸入,如此循環,以使偏差為零。橫擺角速度控制器的原理如下:當預測橫擺角速度和實測橫擺角速度的偏差為正時,控制器使初始附著系數減小,以減小參考模型的橫擺角速度輸出,進而減小偏差。反之,當偏差為負時,控制器使初始附著系數增加。輪速控制器原理類似。另外,由于橫擺角速度有正負之分,故須取絕對值處理,而輪速恒為正,不須取絕對值。這樣由橫擺角速度控制和輪速控制得出的附著系數估計值分別為μωr和μωw,由經驗公式可算出最終加權后的附著系數μ。
式中:n為加權系數,取2;δfmax為前輪最大轉角。
附著系數估算流程如圖3所示。
3 控制策略
傳統的EPS助力控制策略是通過助力曲線來決定電動機的助力電流大小,即給定轉向盤轉矩信號和車速信號則助力電流便隨之確定,并沒有考慮附著系數的影響。本文中提出一種電流補償助力控制策略,即在助力曲線的輸出端疊加一個補償電流,可使附著系數的影響很好地反映在助力電流上,補償電流的大小由模糊控制算法得出。
設定補償電流算法的原則:同一車速下附著系數越低則轉向時駕駛員操縱轉矩越小,所以新型EPS控制器使駕駛員操縱轉矩提高的程度需越大。低附著路面低速轉向時轉向阻力矩降低的程度小,此時應主要考慮轉向輕便性,略微增加駕駛員操縱轉矩即可;而高速轉向時轉向阻力矩降低的程度大,應使操縱轉矩大幅增加,但是增加的操縱轉矩不能超過國標的規定值。低附著路面條件下的新型EPS操縱轉矩應大于正常路面下的操縱轉矩,以間接告訴駕駛員此時車輛正行駛在低附著路面上。隨著轉向盤轉角的增大,駕駛員額外增加的轉矩也應增大,以保持路感。因此,設定其算法如下
式中:Ii為電動機理想電流;Ia為助力曲線輸出助力電流;Ic為補償電流;K為電流補償系數,K不是一個定值,路面附著系數越小或車速越高,K值越大。本文中采用模糊控制確定K值。
控制器輸入為附著系數μ和車速u,輸出為電流補償系數K。附著系數的論域定義為A{1,2,3,4,5,6},量化因子 kμ=6.25。車速的論域定義為B{0,1,2,3,4,5,6},量化因子 ku=0.05。電流補償系數的論域定義為 C{0,1,2,3,4,5},比例因子 kK=0.3。附著系數論域 A劃分為5個模糊子集{S(小),MS(中小),M(中),MB(中大),B(大)}。車速論域B和電流補償系數論域C均劃分為6個模糊子集{ZO(零),S(小),MS(中小),M(中),MB(中大),B(大)};各語言變量的隸屬度函數選用三角形和梯形,如圖4~圖6所示。模糊控制規則選用Mamdani型,根據補償電流算法的設定原則離線得出其模糊規則表,見表1,其輸入、輸出變量三維關系如圖7所示。
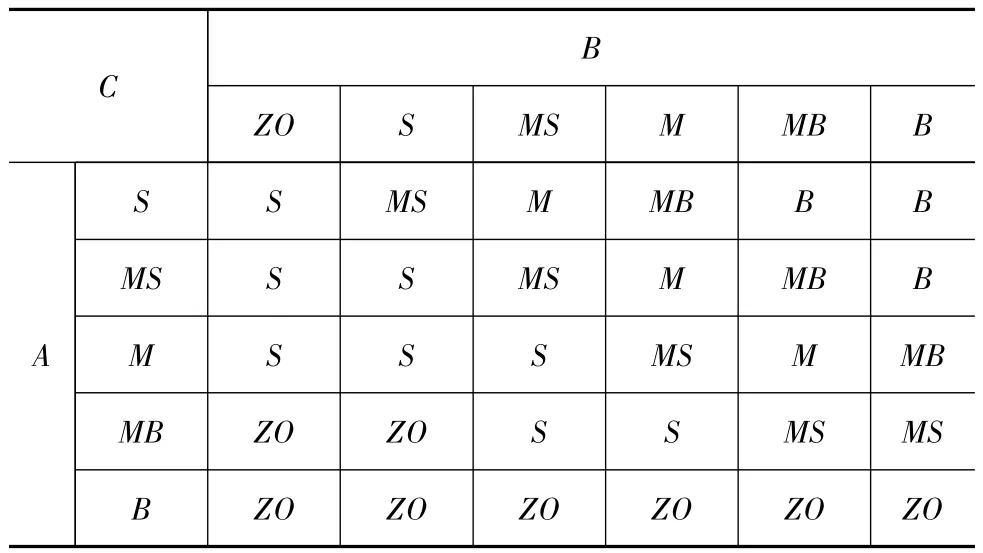
表1 控制規則表
本文中設計的電流補償助力控制器可以用框圖表示,如圖8所示。
4 系統仿真
在Matlab/Simulink中建立EPS系統模型,其框圖如圖9所示。
以路面附著系數0.8表示正常情況下的路面,以附著系數0.2和0.4表示低附著系數下的路面,作對比研究。以正弦信號為轉向盤的角輸入,在車速分別為25km/h(低速)和65km/h(高速)時對所建Simulink模型進行仿真,結果見圖10和圖11。
從圖10中可以看出,低速行駛時附著系數減小對駕駛員操縱轉向盤轉矩的影響并不大,此時所施加的電流補償控制可以在保證轉向輕便性的前提下略微提高轉向盤轉矩。從圖11中可以看出,高速行駛時若附著系數減小,則駕駛員操縱轉矩將大幅降低,使駕駛員喪失路感,而通過施加電流補償控制可以使駕駛員操縱轉矩大幅提高。由圖10(a)和圖10(b)的對比及圖11(a)和圖11(b)的對比可知,同一車速下附著系數越小,則相同轉向盤轉角時駕駛員操縱轉矩越大。
增加了電流補償控制后,在低附著路面下駕駛員操縱轉矩均大于正常路面附著條件下的操縱轉矩,通過這個轉矩增加值可以間接告訴駕駛員此時車輛正行駛在低附著路面上,并且轉矩增加值越大說明此時附著系數越小,即通過駕駛員自身的感覺反映出路面附著系數低的程度。因此本文中提出的控制策略可以很好地提高駕駛員的路感,防止車輛轉向過度,增加了行駛安全性。
5 結論
建立了整車非線性動力學模型和Dugoff輪胎模型,設計了基于橫擺角速度和輪速偏差的附著系數估算器,提出了基于附著系數的電流補償助力控制策略,設計了模糊控制器以確定電流補償系數的大小,構建了Simulink系統仿真模型。仿真結果說明本文中提出的控制策略可以有效地提高駕駛員路感,防止車輛轉向過度。
[1] 王啟瑞,陳無畏,黃森仁,等.汽車電動助力轉向系統的H∞控制研究[J].汽車工程,2004,26(5).
[2] 汪少華,陳龍,袁傳義.車輛半主動懸架與助力轉向集成控制的仿真研究[J].汽車工程,2009,31(11).
[3] Kurishige Masahiko,Tanaka Hideyuki,Inoue Noriyuki,et al.An EPS Control Strategy to Improve Steering Maneuverability on Slippery Roads[C].SAE Paper 2002-01-0618.
[4] 趙林峰,陳無畏,秦煒華,等.低附著路面條件的EPS控制策略[J].機械工程學報,2011(2).
[5] Mitschke Manfred.汽車動力學[M].北京:清華大學出版社,2009.
[6] Badawy Aly,Zuraski Jeff,Bolourchi Farhad,et al.Modeling and Analysis of An Electric Power Steering System[C].SAE Paper 1999-01-0399.
[7] Dugoff Howard,Fancher P S,Segel Leonard.An Analysis of Tire Traction Properties and Their Influence on Vehicle Dynamic Performance[C].SAE Paper 700377.
[8] 耶爾森·賴姆帕爾.汽車底盤基礎[M].北京:科學普及出版社,1992.
[9] Shim Taehyun,Margolis Donald.Model-based Road Friction Estimation[J].Vehicle System Dynamics,2004,41(4).
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
科學大眾(2021年9期)2021-07-16 07:02:40
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
汽車電器(2018年1期)2018-06-05 01:22:54
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
