基于多傳感器信息融合的列車定位方法研究
2014-10-10 07:28:14康隨武劉曉娟
鐵路計算機應用 2014年1期
康隨武,劉曉娟
(蘭州交通大學 電子與信息工程學院,蘭州 730070)
基于多傳感器信息融合的列車定位方法研究
康隨武,劉曉娟
(蘭州交通大學 電子與信息工程學院,蘭州 730070)
針對城市軌道交通中列車定位問題,提出了一種基于聯(lián)邦卡爾曼濾波器的多傳感器信息融合列車定位方法,建立了GPS/IPS/DR信息融合模型,對GPS/IPS/DR組合的信息融合定位進行了MATLAB仿真,結果表明,GPS/IPS/DR融合定位能提高列車的定位精度和可靠度,能很好的抑制傳統(tǒng)列車定位中的積累誤差。
列車定位;多傳感器信息融合;聯(lián)邦卡爾曼濾波器;定位精度
列車定位技術在整個列車控制系統(tǒng)以及列車運行中起著很重要的作用,隨著基于通信的列車控制系統(tǒng)(CBTC)在我國城市軌道交通中的中廣泛應用,對列車定位精度提出了更高的要求,實時、準確地獲得列車的速度和位置信息是保證列車安全、高效運行的關鍵因素,影響列車定位精度的重要原因是車輛采用的傳感器和定位機理。
傳統(tǒng)定位中采用單一傳感器進行測量和計算,測速誤差隨時間不斷累積,很難獲得持續(xù)、高精度的列車位置和速度信息,只能保證短時間的定位精度,因此,有必要研究一種以多傳感器融合技術為基礎的定位方法,通過信息冗余互補提供更加可靠、精確的位置信息,這種融合技術的實現需要在融合算法的基礎上才能完成。
傳統(tǒng)的融合算法采用的是基于卡爾曼濾波理論的狀態(tài)估計算法,卡爾曼濾波器適合動態(tài)測量,因此在列車測速定位中有很好的應用,到1988年,Carlson在卡爾曼濾波的基礎上又提出了聯(lián)邦卡爾曼濾波算法,相對而言,聯(lián)邦卡爾曼濾波器最大的特點是它屬于分塊估計的分布式濾波器,采用方差上界消除技術和統(tǒng)一信息分配原則,對多傳感器組合系統(tǒng)實現信息融合,實現系統(tǒng)整體狀態(tài)的最優(yōu)估計[1],這種濾波結構不僅容錯結構好、計算速度快、而且信息分配十分靈活,因此在城市軌道交通智能控制系統(tǒng)的研究中受到了許多學者的青睞。
1 聯(lián)邦卡爾曼濾波
1.1 基本原理
聯(lián)邦卡爾曼濾波器的結構通常為分布式融合系統(tǒng)結構,是一種具有兩級濾波結構的分散化濾波方法[2],如圖1所示,它由參考系統(tǒng)、主濾波、若干個子濾波器組成。
其中,每個子濾波器分別獨立地進行時間更新和測量更新,而主濾波器則只進行時間更新,并且融合各子濾波器的測量結果,參考系統(tǒng)是整個測量系統(tǒng)的重要組成部分,其輸出一方面給各子濾波器作為測量值輸入,得出各個子濾波器的局部估計值xi及其協(xié)方差陣pi,另一方面直接送到主濾波器進行估計,把得出的子濾波器的局部估計值和主濾波器的估計值進行融合處理,最后輸出全局估計和Pg對應的協(xié)方差陣 。

圖1 聯(lián)邦卡爾曼濾波器的結構
聯(lián)邦卡爾曼濾波器中子濾波器估計均方誤差陣和子濾波器的狀態(tài)量可以進行重置,重置過程中信息因子的分配方法也有許多,因此可以構造多種濾波結構,聯(lián)邦卡爾曼濾波器正是利用這種信息分配原理把被測系統(tǒng)的動態(tài)信息分配到各子濾波器與主濾波器中,使得各個子系統(tǒng)之間相互獨立,然后進行信息的最優(yōu)融合估計,最終得出整個系統(tǒng)的最優(yōu)解。
1.2 聯(lián)邦卡爾曼濾波系統(tǒng)模型

設任意離散系統(tǒng)的狀態(tài)方程為:(1)式中X(k+1)是系統(tǒng)的狀態(tài)向量,W(k)是系統(tǒng)的動態(tài)噪聲,是零均值白噪聲,Φ(k+1/k)為系統(tǒng)的狀態(tài)轉移矩陣,Γ(k+1/k)是系統(tǒng)的噪聲轉移矩陣。
系統(tǒng)的測量方程:
當有N個子濾波器對系統(tǒng)進行獨立的測量時,任意一個子濾波器的測量方程為:

(2)式中Z(i)k是第i個傳感器的量測值,V(i)k是第i個傳感器的量測噪聲,屬于零均值白噪聲,H(i)k為第i個傳感器的量測矩陣。
1.3 聯(lián)邦卡爾曼濾波器融合算法
(1)聯(lián)邦卡爾曼濾波器采用信息分配原理取消各個子濾波器之間的相關性,即:

其中Bi為信息分配因子,Qi為第i個子系統(tǒng)的噪聲,滿足信息守恒原理,即:

2 多傳感器信息融合測速定位系統(tǒng)模型的建立
目前,已有的融合測速定位系統(tǒng)組合模型有:GPS/IPS組合、DR/Balise組合、多普勒雷達與GPS組合、GPS/IPS/多普勒雷達/速度傳感器組合等組合方式,這些組合方式由于既有互補,又有冗余,明顯具有較高的可靠性,當其中一個有故障時,系統(tǒng)可以降級使用,但只有采用合理的融合算法與融合結構才能獲得好的結果[2],實際應用中合理的選取多個傳感器作為信息融合的對象顯得尤為重要,因為不同的傳感器具有不同的特征,誤差來源也不同,所以需要將其進行優(yōu)化配置,利用優(yōu)勢互補來降低定位誤差,從而獲得更為全面、可靠的定位結果。
2.1 信息融合傳感器的選擇
本文中選取列車定位系統(tǒng)(GPS,Global Positioning system)、航位推算系統(tǒng)定位(DR,Dead Reckoning)、慣性列車定位,(IPS,Inertial Positioning System)系統(tǒng)作為信息融合對象,建立GPS/IPS/DR信息融合的組合定位模型,原因是GPS/IPS/DR融合結構利用GPS的長期穩(wěn)定性與適中精度,來彌補IPS的誤差隨時間傳播或增大的缺點,利用IPS的短期高精度來彌補GPS接收機在受干擾時誤差增大或遮擋時丟失信號,DR系統(tǒng)的優(yōu)勢在于其成本較低,而且在有限的時間內提供較高精度的車輛實時定位信息[3],可以作為GPS/IPS的輔助定位方式,三者的結合能夠使得定位系統(tǒng)的成本下降。GPS、DR和IPS各有優(yōu)勢,定位誤差來源各不相同,所以可以將它們組合起來,優(yōu)勢互補,提高整個系統(tǒng)的定位精度、容錯性和可靠性。
2.2 GPS/DR/IPS融合結構
采用GPS/DR/IPS信息融合系統(tǒng),設計聯(lián)邦卡爾曼濾波器,其結構如圖2所示。
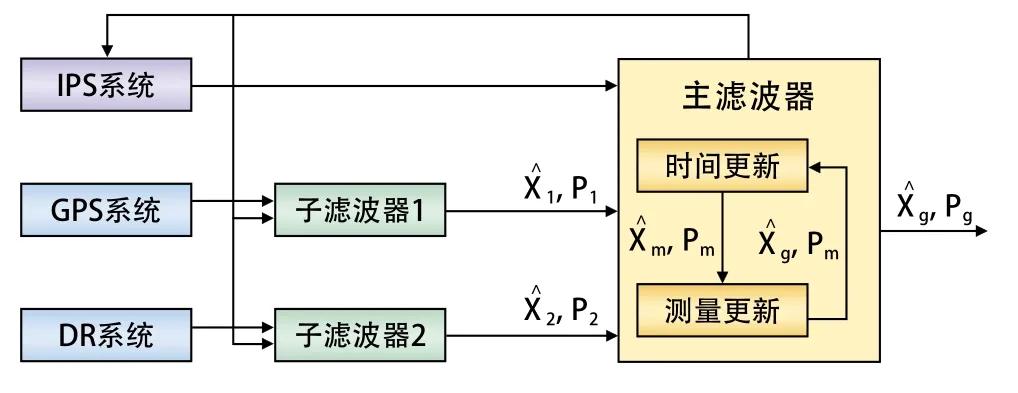
圖2 GPS/IPS/DR融合結構
系統(tǒng)中選取IPS作為參考系統(tǒng),而GPS、DR作為子系統(tǒng),其原因是由于IPS無論是在工作的獨立性、還是適應性都比GPS、DR有絕對的優(yōu)勢。(1)從工作原理上講,IPS根據慣性原理工作,而慣性是任何物體的固有屬性,它不以外部環(huán)境的改變而改變,所以IPS工作的獨立性很強,僅靠系統(tǒng)本身就能在全天候條件下,在全球范圍內和任何介質環(huán)境里自主、隱蔽的進行連續(xù)的三維空間定位,能夠提供反映運動體運動狀態(tài)的完整信息,獨立自主的提供最全面的導航參數[2];(2)從對環(huán)境的適應性來講,IPS適應性強很強;具有極寬的頻帶,能夠跟蹤和反映運動體的任何機動運動,并且對磁、電、光、熱及核輻射等形成的波、場、線的影響都不敏感,有極強的抗干擾能力。
2.3 GPS/DR/IPS融合結構的數學模型
設被測列車在區(qū)間運行,其狀態(tài)方程為:

式中:e, n, ve, vn, ae, an, εe, εn分別為被測車輛東向、北向的位移量、速度、加速度,εe, εn是偏離兩個坐標軸方向的誤差量。
整個融合系統(tǒng)的狀態(tài)方程為:

觀測方程為:

當i=1時,指GPS子系統(tǒng),其觀測量通常是列車東向位置e和北向位置n(東向坐標與北向坐標)[4][5],其中:

上式觀測噪聲V(1)k+1中ue(k+1)和un(k+1)分別是GPS在定位過程中的東向和北向誤差,其觀測噪聲協(xié)方差陣為R(1)k+1。
當i=2時,指DR子系統(tǒng),其觀測量為陀螺的角速度ω和系統(tǒng)在采樣周期T內里程表顯示的車輛行駛距離S,其中:

觀測噪聲V(2)k+1中us(k+1)和uw(k+1)分別指DR系統(tǒng)定位過程中里程表的誤差和陀螺的漂移量的誤差,R(2)k+1是DR系統(tǒng)V(2)k+1的協(xié)方差陣。
當i=3時指IPS子系統(tǒng),其觀測量為列車加速度a,系統(tǒng)連續(xù)積分后得到的經度l、緯度λ、和高度h,其中:

上式中ua(k+1), ul(k+1), uλ(k+1), uh(k+1)分別是IPS定位時加速度偏置量誤差、系統(tǒng)輸出緯度、經度、高程誤差,該系統(tǒng)觀測噪聲協(xié)方差陣為R(3)k+1。
得到上述子系統(tǒng)的觀測噪聲陣和協(xié)方差陣后,GPS/DR/IPS子濾波器再進行時間更新以隨時通過測量傳感器獲取最新數據,在此基礎上再進行量測更新,從而得到GPS子系統(tǒng)和DR子系統(tǒng)的狀態(tài)估計X^i和方差陣 Pi(i=1、2),然后根據上文中所講到的融合算法將IPS、GPS、DR子系統(tǒng)的輸出與主濾波器進行融合,得到GPS/DR/IPS的全局狀態(tài)估計值X^g和方差Pg,最后通過信息分配原則,進行上述過程的循環(huán)運算。
3 仿真試驗與分析
本文基于MATLAB仿真平臺,對所提出的基于聯(lián)邦卡爾曼濾波器的GPS/DR/IPS融合定位方法進行了仿真試驗[6~7],試驗分別用DR、GPS、IPS數據單獨濾波,GPS/DR/IPS融合濾波這2種方法分別對運行車輛進行定位,比較2種方法的列車定位精度,采樣周期取T=1 s,仿真時長為200 s,仿真中為了對實際IPS定位系統(tǒng)誤差進行簡化,假設列車所行使的軌道在一定時間內是平坦的且初始位置一定,說明與IPS定位系統(tǒng)相關的列車緯度、經度、高度誤差均可忽略不計,設該列車以東向75 km/h速度勻速行駛,GPS單獨定位時接收機位置誤差均方差為8 m,速度誤差均方差為0.3 m/s,DR系統(tǒng)單獨定位時陀螺儀漂移均方差為0.2。/h,里程表輸出誤差取0.1 m,IPS單獨定位時加速度偏置量取10-3g。
圖3為所得到的定位誤差曲線,從仿真結果可見,采用基于聯(lián)邦濾波器的GPS/DR/IPS融合定位方法后,車輛定位精度比其各自單獨定位時有明顯改進,GPS/DR/IPS組合導航顯著的抑制了IPS的輸出誤差隨時間明顯發(fā)散的趨勢,改善了各自單獨定位出現的誤差積累,提高了定位精度和整個系統(tǒng)對的容錯性與可靠性。
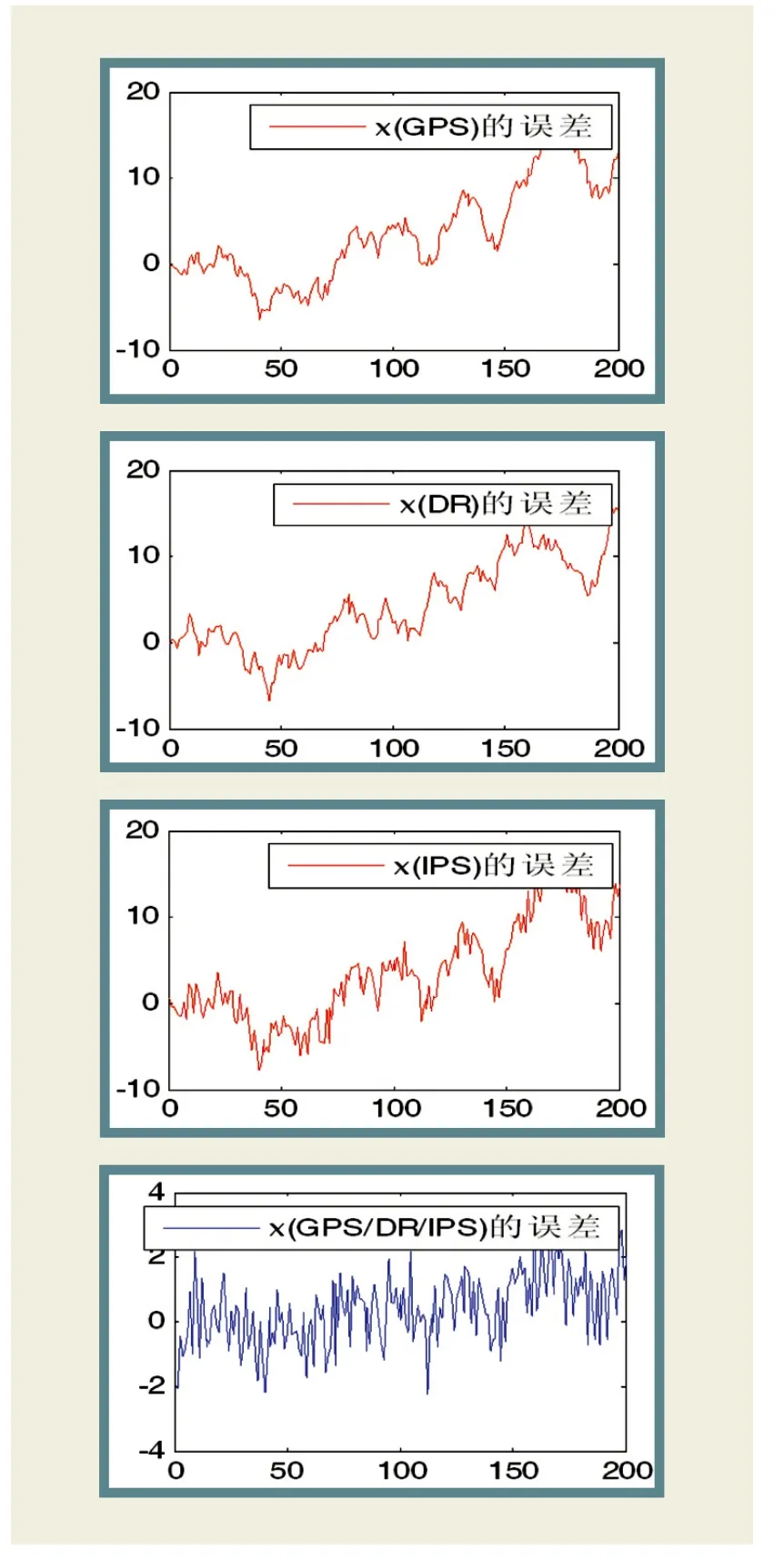
圖3 定位誤差比較圖
4 結束語
本文研究了以多傳感器信息融合技術為基礎的列車定位方法,建立了聯(lián)邦卡爾曼濾波的GPS/ IPS/DR組合模型,并通過MATLAB仿真平臺進行了驗證,結果表明了GPS/IPS/DR融合測速定位的可行性,保證了列車定位誤差不隨時間增長而積累,有效地提高了城市軌道交通列車定位的精度和定位系統(tǒng)的可靠性。
[1]閻樹田,曹長虹.多傳感器信息融合的列車定位方法研究[J].機械與電子,2011(4):19-22.
[2]朱 虹,關桂霞,關 永.基于聯(lián)邦卡爾漫濾波器的車載GPS/DR信息融合[J].計算機工程與設計,2008,29(20):5357-5359.
[3]劉曉娟,張雁鵬,湯自安.城市軌道交通智能控制系統(tǒng)[M].北京:中國鐵道出版社,2008.
[4]張 洋,周達天,劉宏杰,劉 波.基于多傳感器融合的列車測速定位方法[J].都市快軌交通,2011,24(4):30-32.
[5]嚴建鵬,陳小強,侯 濤.基于改進聯(lián)合卡爾曼濾波算法的列車測速信息融合[J]. 鐵道科學與工程學報,2012,9(2):89-93.
[6]唐向宏,岳恒立,鄭雪峰.MATLAB及在電子信息類課程中的應用[M].北京:電子工業(yè)出版社,2005.
[7]馮 剛,呂茂天,覃 天.基于MATLAB的卡爾曼濾波仿真研究[J].計算機科學與技術,2011,29(6):61-63.
[8]Bin Ling,Xiaoyan Yu,Lichen Liu. THE INFORMATION FUSION OF BASED ON FEDERATED KALMAN FILTER AND NEURAL NETWORKS[J]. 2010 International conference on computational and information science,2010,PP. 1099-1102.
[9]Hongwu Cao,Renhao Zhou,JianLiang Hao.An Introduction of Multisensor Optimal Information Fusion Based on Kalman Filter Method[J]. 2011 International Conference on Electronic & Mechanical Engineering and Information Technology,2011,PP. 3272-3276.
[10]劉 鋒.基于通信的列車控制模式下的列車定位新技術[J]. 城市軌道交通研究,2012(4):48-53.
責任編輯 徐侃春
Research on train location method based on multi-sensor information fusion
KANG Suiwu, LIU Xiaojuan
( School of Electronics and Information Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China )
Due to the problem of train location in Urban Transit, a kind of train locating method of multisensor information fusion based on Federal Kalman Filter was proposed, GPS/IPS/DR information fusion model was established. The train location of information fusion of GPS/IPS/DR was simulated by MATLAB. The simulating results showed that GPS/IPS/DR integration could improve the accuracy and reliability of train location, restrain the error accumulation of traditional location method.
train location; multi-sensor information fusion; Federal Kalman Filter; location accuracy
U284∶TP39
A
1005-8451(2014)01-0014-04
2013-08-08
康隨武,在讀碩士研究生;劉曉娟,教授。
猜你喜歡
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中華手工(2017年2期)2017-06-06 23:00:31
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
中外會展(2014年4期)2014-11-27 07:46:46
電子設計工程(2014年6期)2014-02-27 11:56:54