基于HiCORS的高速公路高等級控制測量及精度分析
2014-09-29 02:37:22李圣明
地理空間信息 2014年4期
關鍵詞:測量
鄭 亮,王 晶,廖 佳,李圣明,李 林
(1.中交第二公路勘察設計研究院有限公司,湖北 武漢 430056;2.寧波市測繪設計研究院,浙江 寧波 315042)
近年來, CORS在我國得到了廣泛的應用與推廣,CORS站逐漸取代傳統的高等級GPS控制點,成為區域高精度坐標參考框架的主要維持手段[1]。在公路勘測中,主要使用CORS進行網絡RTK作業,快速采集地形特征點、線或進行施工放樣[2,3],而利用CORS進行高等級控制測量的應用案例還不多。本文結合海南中線高速公路勘測實例,介紹了HiCORS數據在高等級控制測量中的后處理方法,對基線解算和平差成果的精度進行了分析。
1 技術方案
海南中線瓊中-五指山-三亞(樂東)段高速公路(K120+000至K247+329)是海南省“十二五”期間重點公路建設項目。依據《公路勘測規范》[4]和設計施工要求,全線建立四等平面及高程控制網,其中GPS平面控制網采用2000國家大地坐標系統,并提供海南白沙獨立坐標系統和海南海口獨立坐標系統成果。
按照“分級布網,逐級控制”的原則,沿線均勻布設三等GPS控制點18個;三等GPS控制點之間,平均每5 km布設一對相互通視的四等GPS控制點;四等GPS控制點之間加密一級GPS導線點,平均點間距約500 m。以上18個三等GPS控制點構成四等平面控制網的框架網,并作為四等控制網的起算點。
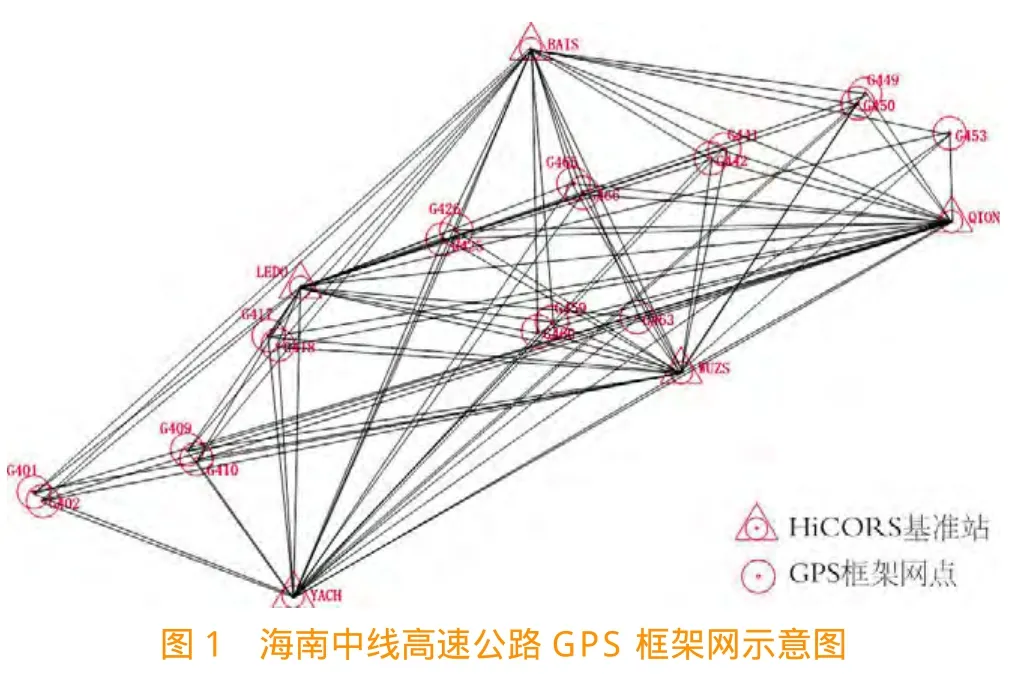
GPS提供的是WGS84大地坐標或空間直角坐標,為了減少局部區域投影變形,工程測量一般采用地方獨立坐標,即需要將WGS84坐標轉換為地方獨立坐標。數據后處理要解決2個問題:①WGS84→CGCS2000;②WGS84→海南地方坐標系。目前HiCORS在運行的基準站有13個,基準站間距在50~70 km,已向用戶提供CGCS2000坐標服務。根據海南中線高速公路線位,利用樂東站、崖城站、白沙站、瓊中站、五指山站共5個HiCORS基準站與GPS框架網構成聯測網(如圖1所示),并作為GPS框架網的基準,參與GPS框架網的數據處理,實現WGS84向CGCS2000的轉換。對于第二個問題,由于存在保密參數的制約,無法得到海南地方坐標系統的轉換參數,但是通過海南省測繪地理信息局提供的坐標轉換服務[5,6],可將CGCS2000轉換到地方坐標成果。因此,問題的關鍵在于解算GPS框架網在CGCS2000下的控制點成果。
2 數據整理
HiCORS基線解算處理采用GAMIT。GAMIT具有解算精度高、自動化處理程度高等優點[7]。GAMIT使用的觀測數據為 RINEX格式,需要將GPS觀測數據進行轉換,并將天線高歸算至天線相位中心。
由于GAMIT軟件是以d為單位,數據整理時,將所有的該時段觀測數據(包括O文件和N文件)放在一起,并進行以下數據正確性檢驗:
1)點號一致性與正確性:核實文件名中的點號和觀測文件中點號的一致性與正確性。
2)接收機與天線型號的正確性:根據GAMIT軟件對接收機與天線型號的要求,核實型號的正確性。
3)數據標準化:使用隨機軟件標準化,形成觀測數據文件sitedays.yyo和廣播星歷文件sitedays.yyn,其中site為點位編碼,day為年積日,s為觀測時段號,yy為觀測年號,o為觀測數據,n為廣播星歷。文件名為小寫。
4)數據歸類:建立工程總目錄,然后按照時段號建立子目錄,將同一時段不同測站的RINEX數據拷貝至子目錄下。
5)數據準備:下載所選取HiCORS基準站的同步觀測數據和IGS提供的快速精密星歷。
3 基站控制網數據處理
3.1 基線解算
正確修正觀測數據中的跳周和刪除大殘差觀測值的數據編輯是GPS數據處理中的主要工作。數據編輯采用GAMIT軟件里的AUTCLN模塊自動運行。數據編輯工作完成后,生成干凈的觀測數據文件(X-文件),用于每時段基線的解算。求解的基線向量全部為雙差固定解。
1)先驗坐標獲取。先驗坐標采用差分的辦法獲得,即以HiCORS站為基準站進行差分,求得GPS觀測站的先驗坐標。
2)同步環閉合差。GPS同步環閉合差可反映一個同步環數據質量的好壞。GAMIT軟件基線解算采用的是網解,因此同步環閉合差在基線解算時已經進行了分配。對于GAMIT軟件基線解算的同步環檢核,可以把基線結果的Nrms值作為同步環質量好壞的一個指標,Nrms經驗值應小于0.25。框架網基線解算同步環精度如表1所示,表1中Nrms值均小于0.25,說明基線解算時周跳基本剔除。
3)重復基線。各時段向量的重復性反映了基線解的內部精度,是衡量基線解質量的一個重要指標。其定義為:
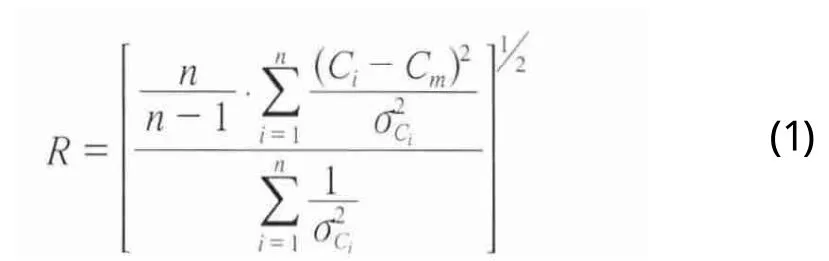
式中,n為同一基線的觀測時段總數;Ci為一個時段基線分量或邊長;σ2Ci為i時段相應的Ci分量的方差;Cm為各時段的加權平均值。
同一基線和其各分量不同時段的較差應滿足:
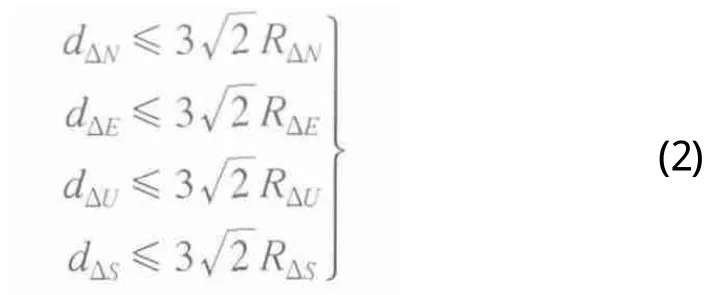
框架網基線解算共統計了30條重復基線,如表2所示。框架網相鄰點基線長的重復性優于±12.6 mm,重復性均在規范限差內,說明基線解的內部精度十分可靠。

表1 框架網同步環Nrms統計表
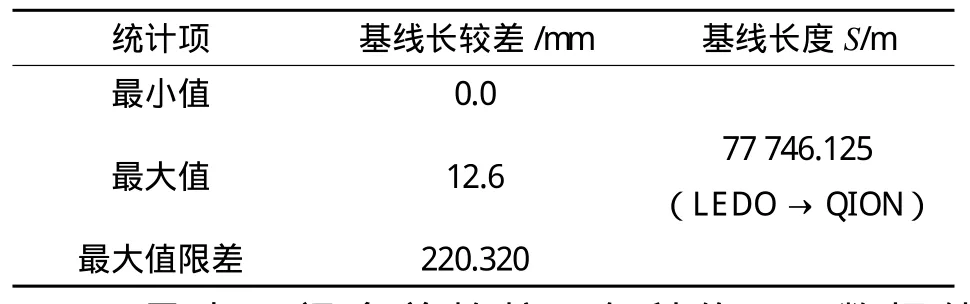
表2 控制網基線重復性統計
4)異步環閉合差檢核。在科傻GPS數據處理系統中共統計了66個異步環,且都通過了質量檢核,其坐標分量閉合差、長度閉合差全部滿足規范要求。其中平均閉合環精度為0.11×10-6,最弱閉合環精度為0.35×10-6。最弱的閉合環為LEDO→BAIS→G426→LEDO,此閉合環的總長度為123 586.798 m,全長閉合差為0.043 m(限差為±0.373 m)。可見,框架網基線解算質量十分可靠。
3.2 網平差
1)平差原則。網平差采用武漢大學開發的科傻GPS數據處理軟件。在CGCS2000坐標系(參考框架為ITRF97,參考歷元為2000.0)下,約束樂東站(LEDO)和崖城站(YACH)兩個HiCORS基準站,進行三維約束平差,求出框架網點的CGCS2000坐標。
2) 無約束平差。三維無約束平差以樂東站(LEDO)作為固定點。平差后,最弱點G463點位中誤差為0.023 m;最弱邊G465→G466相對精度為10.01×10-6(1/100 000),其基線長度為499.716 m。可見,控制網的內符合精度很高。
3) 約束平差。完成無約束平差后,以樂東站(LEDO)和崖城站(YACH)兩個HiCORS基準站為已知點,采用CGCS2000坐標系進行約束平差,平差后的點位精度如表3所示。

表3 控制網平差后點位精度表
3.3 精度分析
《公路勘測規范》規定,各等級平面控制網最弱點位中誤差不得大于±5 cm;三等平面控制測量精度中,最弱相鄰點邊長相對中誤差不得大于1/70 000。約束平差最弱點G463點位中誤差為0.034 m;平差后最弱邊 G459→G460相對精度為 11.23×10-6(1/89 000),其基線長度為419.970 m,完全滿足規范要求。
海南中線高速公路項目四等平面控制網布設GPS控制點64個,以框架網中的18個三等點作為平面起算數據,平差后最弱點點位中誤差為±2.78 cm,最弱邊相對邊長中誤差為1/41 000,優于規范要求的±5.0 cm和1/35 000,滿足后續設計與施工要求。
4 結 語
將HiCORS基準站應用于控制網測量有以下技術優勢:①GPS控制網和HiCORS基準站構成聯測網,經過數據后處理,精度可以達到三等GPS平面精度要求;②HiCORS可以為各等級控制網提供全天候不間斷的起算基準,用戶根據基準站分布下載同步觀測數據即可進行基線解算和網平差;③HiCORS為GPS基線解算提供了高精度的起算坐標,確保解算結果的可靠性;④控制網不需要聯測已知點,相對于常規GPS靜態測量,工作效率可提高30%;⑤HiCORS可提供全省一致的坐標參考框架,適合于公路帶狀控制網大范圍、跨區域的協同作業。
[1]劉鴻飛,姜衛平.CGCS2000框架下區域CORS站數據聯合處理[J].武漢大學學報:信息科學版,2014,39(2):161-165
[2]宋雅楠.CORS技術在公路工程中應用前景展望[J].遼東學院學報:自然科學版,2010,17(2):116-119
[3]郁連云.CORS站在高速公路測量中的應用研究[J].科技資訊,2012(26):30-31
[4]JTG C10-2007.公路勘測規范[S].
[5]麥照秋,歐小善,陳玉瑩,等.基于HiCORS的實時在線坐標轉換關鍵技術的探討[J].測繪通報,2012(6):1-3
[6]麥照秋,陳玉瑩,歐小善.格網法在CORS系統坐標轉換中的應用研究[J].測繪通報,2013(11):55-57
[7]孫建,王勇.GAMIT在工程測量方面的使用技巧[J].礦山測量,2006(1):56-58
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00