一種IPMC傳感器實驗平臺設計*
2014-09-25 08:15:16譚永紅
傳感器與微系統 2014年7期
江 春, 譚永紅
(上海師范大學 精密機電系統與控制工程研究室,上海 200235)
0 引 言
離子交換聚合金屬材料(ionic polymer-metal composite,IPMC)是一種新型電致形變高分子材料[1],也被稱之為人工肌肉。其在電場作用下可呈現伸縮、彎曲等各種響應特性;同時,當IPMC受外部力發生形變時,其內部將產生一定的電勢,使機械能轉換為電能。IPMC制動特性的研究已逐漸趨于成熟,并實現了相關的應用,例如:美國NASA的JPL實驗室用IPMC驅動器制造了與自動刮雨器相類似的除塵刷,用于太空儀器表面除塵[2];日本Eamex公司開發了IPMC材料驅動的商業產品人工魚[3];日本的名古屋大學研制了基于IPMC的泳動機器人[4];以及微小膠囊閥[5]、微小夾持裝置[6]等。而IPMC傳感特性的研究尚處于實驗室階段,研究相對較少,因此,IPMC傳感性能的研究將會是未來IPMC領域的研究趨勢。
在對IPMC厚度方向給一定的變形時其會產生一定的電壓,若要研究IPMC傳感性能就得研究輸入信號與輸出信號之間的關系,本實驗中IPMC為長31 mm、寬6 mm、厚0.5 mm長條形薄片,給IPMC厚度方向施加什么樣的壓力信號尤為關鍵,因此,在研究IPMC傳感特性時,良好的實驗平臺決定著給IPMC施加激勵信號的準確性與穩定性。本文以STM32單片機為控制核心[7,8],搭建起IPMC實驗平臺。
1 現有實驗平臺的缺點
現有實驗平臺由51單片機、步進電機、OP07放大電路、激光位移傳感器以及信號采集設備組成,如圖1所示。平臺底部為步進電機,其工作原理為:聯動裝置通過聯軸器與步進電機結合,通過51單片機和驅動電路來控制步進電機按某個角度來回正反轉,當步進電機在一定角度內來回正反轉的同時,聯動裝置上的夾子將夾住IPMC帶動其按照一定的規律產生形變,激光位移傳感器采集IPMC擺動幅度值,通過示波器來讀取并顯示IPMC施加的激勵信號波形。
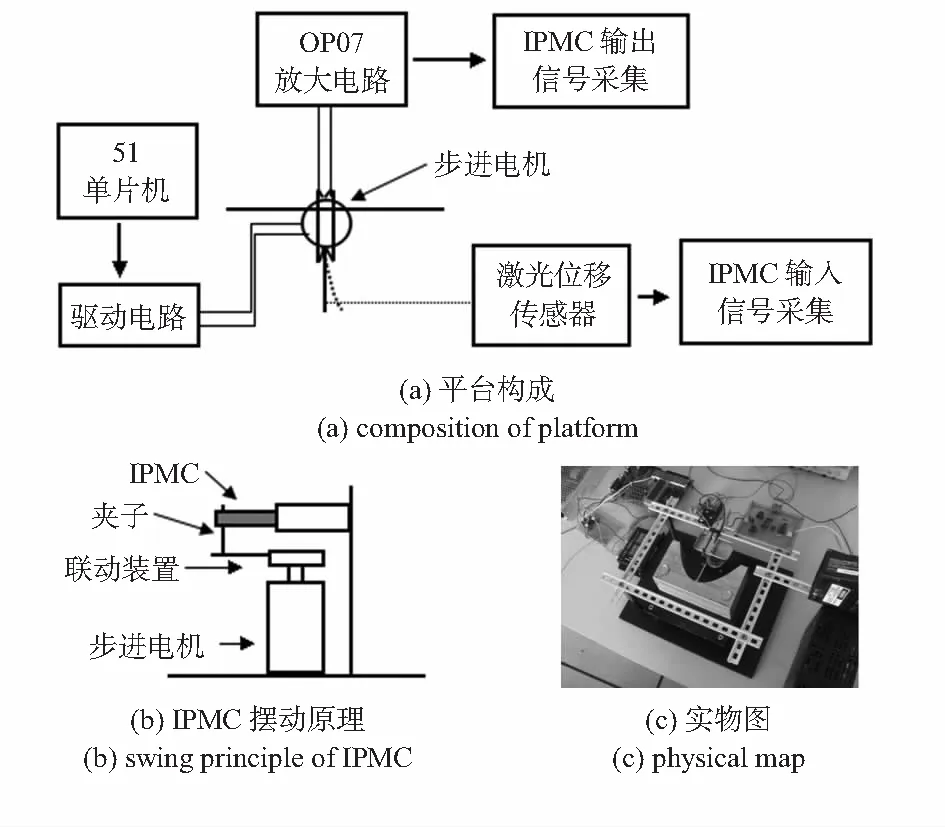
圖1 現有的IPMC實驗平臺結構示意圖
但是由于步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這樣反映在IPMC運動過程中就是每次運動一個幅度,使得測量到IPMC輸入信號不均勻連續,并且IPMC是在低頻信號(0.1~2 Hz)的作用下產生的電壓比較明顯[9],因此,在低頻環境下,步進電機的缺陷更大。同時,步進電機固定轉角正反轉不易產生反映在IPMC運動軌跡上的正弦信號,即在IPMC未發生偏轉處速度最大,IPMC將達到最大角度處步進電機轉速趨近于零,亦不便于后期IPMC對輸入基本的正弦信號的所產生的狀態信號進行分析。
2 實驗平臺的改進
2.1 總體方案設計
改進的實驗平臺將步進電機更換為直流伺服電機,直流伺服電機相較于步進電機其控制精度更高,克服了步進電機隨脈沖轉動步距角的不連續性。新的實驗平臺工作原理是以STM32為控制核心,并通過精密電位器測得角度值做反饋,PID控制直流伺服電機轉動角度的閉環伺服系統,如圖2所示。
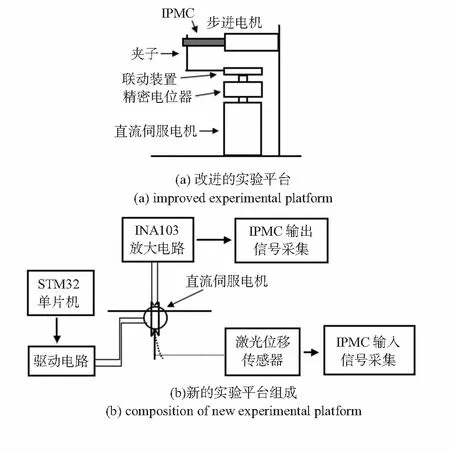
圖2 改進后的IPMC實驗平臺示意圖
實驗裝置選用STM32F103單片機為控制核心,直流伺服電機、精密電位器WDD35、以及由LMD18200構成的驅動電路所組成。STM32F103單片機產生PWM波經由驅動電路驅動電機轉動,同時,精密電位器測得直流電機轉動角度,在正最大角度處和負最大角處給單片機輸出反向電壓信號給LMD18200,讓電機保持在固定角度內來回正反轉,整個過程為PID控制,同時,電機轉速可通過調節PWM占空比可調。系統總體設計框圖如圖3所示。
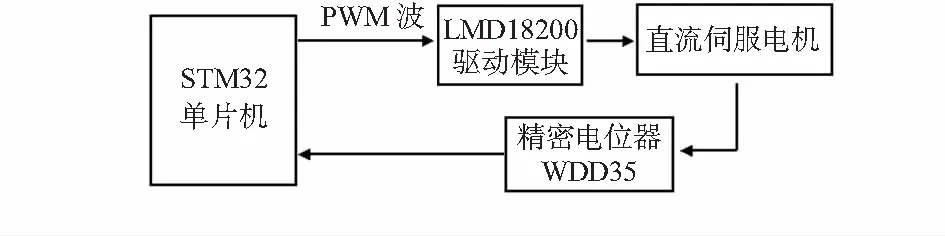
圖3 硬件系統框圖
2.2 主控模塊
主控模塊的STM32單片機是控制器的核心部分。該單片機是ST意法半導體公司生產的32位高性能、低成本和低功耗的增強型單片機,它的內核采用ARM公司最新生產的cortex-M3架構,最高工作頻率72 MHz,256 k的程序存儲空間、48k的RAM,8個定時器/計數器、2個看門狗和一個實時時鐘(RTC),片上集成通信接口有2個I2C,3個SPI,5個USART,1個USB,1個CAN,2個和1個SDIO,并集成有3個ADC和1個DAC,具有80個I/O端口。
2.3 電機驅動模塊
LMD18200是美國國家半導體公司(NS)推出的專用于直流電動機驅動的H橋組件。峰值輸出電流高達6 A,連續輸出電流達3 A;工作電壓高達55 V;TTL/CMOS兼容電平的輸入;并具有良好的抗干擾性。同一芯片上集成有CMOS控制電路和DMOS功率器件,其內部集成了4個DMOS管,組成一個標準的H型驅動橋。通過充電泵電路為上橋臂的2個開關管提供柵極控制電壓,充電泵電路由一個300 kHz左右的工作頻率。
2.4 放大電路
采用低噪聲、高精度的儀表放大器INA103進行放大器的設計制作來代替原有IPMC實驗平臺當中的由OP07芯片構成的放大電路。它具有非常寬的頻帶寬度和優越的動態響應特性,并且INA103芯片具有超低噪聲和失真小的特點,使得噪聲大大降低。
2.5 系統的軟件設計
當把直流電機閉環控制所需的程序編譯沒有錯誤,利用Keil 4編譯環境把程序通過J-LINK下載到STM32單片機。閉合直流電機閉環控制模塊的電源開關,電機開始轉動,STM32單片機隔50 ms采集精密電位器WDD35角度值,增量式PID運算,調節PWM波的占空比。不斷地調試PID參數,可以使電機的轉角達到給定值,這樣即可使電機按照固定角度來回轉動,從而帶動IPMC薄片做往復運動。系統的主程序是一個循環程序,其流程圖如圖4所示。其速度控制算法采用增量式PID算法[10,11]。相比于位置式PID算法,增量式PID算法不容易引起積分飽和,能獲得更好的控制效果。
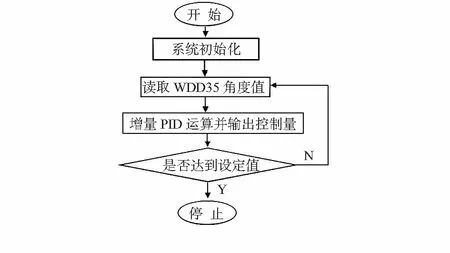
圖4 程序流程圖
3 實驗效果
采用改進后新的實驗平臺設計,可以通過調節PMW占空比來調節直流伺服電機的轉速,從而間接調節IPMC擺動頻率,同時,也可以通過修改程序中直流伺服電機角度值達到改變電機轉動角度大小,從而間接調節IPMC擺動幅度的目的。通過PID算法控制直流伺服電機擺動更加精確,用激光位移傳感器測得IPMC運動軌跡信號為近似標準正弦信號,相比步進電機產生的步進不連續現象有了很大的提升,使得IPMC在低頻環境下采集到的信號具有很好的連續性與穩定性。
圖5給出了IPMC在電機以1.2 Hz來回擺動下測得的輸入信號,結果表明:給IPMC驅動的輸入信號近似標準正弦信號。同時IPMC擺動頻率可任意調節,滿足實驗需在不同頻率下測試的需要。圖6是調節電壓后,使輸出PWM波占空比增大,加大電機轉速后,IPMC在2.8 Hz下測得的輸入驅動信號。因為IPMC受到溫度和濕度的影響大,因此,所有測試結果均為IPMC在室溫20℃環境下測得的。另外,IPMC輸出信號經由INA103芯片構成的放大電路后產生的噪聲也更低,圖7為給定2.8 Hz正弦信號驅動IPMC后產生輸出響應效果,相比之前的OP07放大電路輸出,信號噪聲明顯降低。
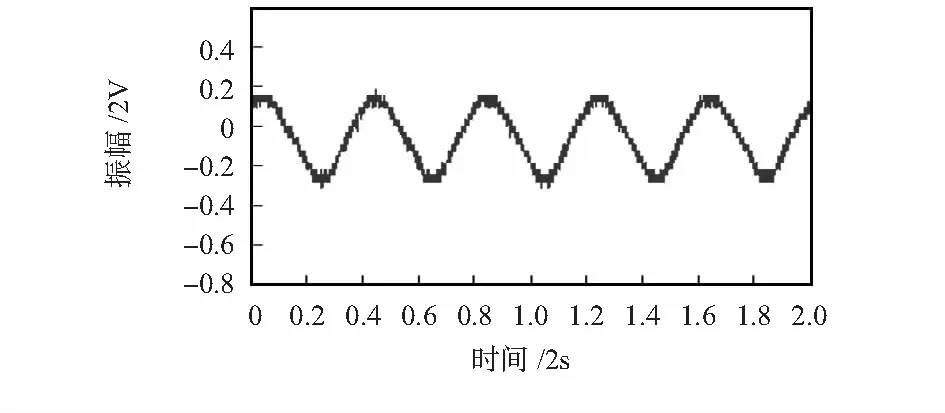
圖5 1.2 Hz正弦信號
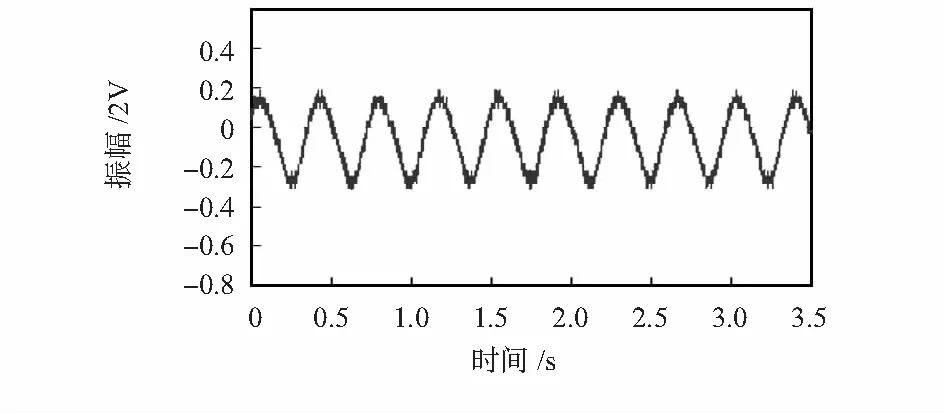
圖6 2.8 Hz正弦信號
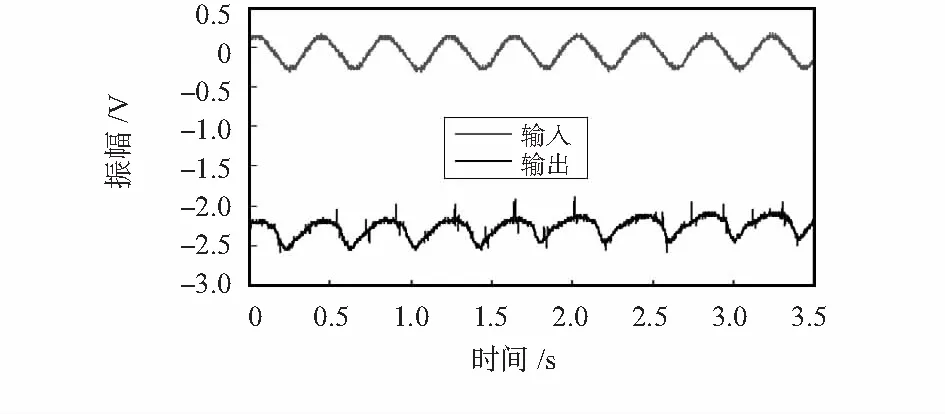
圖7 給2.8 Hz正弦信號IPMC產生的響應
4 結束語
本文介紹了利用STM32單片機與精密電位器作為角度反饋改進了原有實驗平臺的設計,將步進電機換為直流伺服電機,并采用PID算法來控制直流伺服電機按照固定角度轉動,以使IPMC薄片來回彎曲擺動,這種新的設計可以通過改變直流伺服電機的轉速和轉角間接改動IPMC的擺動頻率和幅度。而且直流伺服電機擺動效果可以使得IPMC驅動信號相比步進電機擺動效果更好,并采用具有超低噪聲和失真小的特點的INA103芯片作為放大電路,大大的降低了IPMC輸出信號的噪聲,實驗表明:這種新的實驗平臺設計不僅對IPMC施加的變形信號更加穩定和準確同時也使得IPMC輸出的傳感信號噪聲干擾更小,并且對IPMC擺動頻率和幅度可調,為后續IPMC輸入不同信號的研究提供良好的實驗基礎[12],具有非常高的實用價值。
參考文獻:
[1] Oguro K,Kawami Y,Takenaka H,Bending of an ionic-conducting polymer film-electrode composite by an electric stimulus at low voltage[J].Journal of Micromachine Society,1992(5):27-30.
[2] Sar Coheny.Electroactive polymer actuators as artificial muscles-capabilities,potentials and challenges[C]∥Proceedings of Robotics 2000 and Space 2000,Albuquerque,USA,2000: 191-202.
[3] Guo S X,Fukuda T,Asaka K.A new type of fish-like underwater microrobot[J].IEEE/ASME Transactions on Mechatronics,2003,8(1):136-141.
[4] Takagi Kentaro,Yamamura Masanori,Luo Zhiwei,et al.Development of a rajiform swimming robot using ionic polymer artificial muscles[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems,Beijing,2006:456-462.
[5] Guo S,Hata S,Sugumoto K,et al.Development of a new type of capsule micropump[C]∥International Conference on Robotics and Automation, ICRA’99,Detroit,1999:2171-2175.
[6] Lumia R,Shahinpoor M.Microgripper design using electro-active polymers[C]∥Proceedings of SPIE the 1999 IEEE International Conference on Robotics and Automation,Newport Beach,1999:2226-2231.
[7] 李 寧.基于MDK的STM32處理器開發應用[M].北京:北京航空航天大學出版社,2008.
[8] 孫書鷹,陳志佳,寇 超.新一代嵌入式微處理器STM32F103開發與應用[J].微計算機應用,2010,31(12):22-25.
[9] Shahinpoor M,Kim K J.Ionic polymer-metal composite: I.fundamentals[J].Smart Materials and Structures,2001,10:819-833.
[10] 潘新民,王燕芳.微型計算機控制技術[M].北京:電子工業出版社,2006.
[11] 王曉明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2003.
[12] Claudia Bonomo,Luigi Fortuna,Pietro Giannone,et al.A method to characterize IPMC membrane sensor[D].Ottawa,Canada:University of Catania,2005.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
