一種用于空投翼傘雀降時的聲波高度計系統設計
2014-09-25 08:15:16任建新王青青牛振中
傳感器與微系統 2014年7期
任建新, 王青青, 牛振中
(西北工業大學 自動化學院,陜西 西安 710072)
0 引 言
空投技術[1]是利用降落傘將物資投放到指定地域的一項技術,同時它也是一種非常重要的部隊投送與物資補給手段,在現代戰爭和非戰爭行動中都具有廣泛的應用。翼傘系統的高滑翔性和可控特性[2],使得翼傘系統已成為空投領域研究的熱點。
雀降[3.4]是翼傘的一種重要性能,《降落傘理論與應用》一書中這樣定義雀降:當翼傘以滑翔狀態接近地面時,如果以較快的速度將兩操縱繩同時拉下,在很短的時間內翼傘的前進速度和垂直速度將會迅速地減小到極小值(接近0),若開始操縱的高度選擇適當,落地時速度正好達到最小值,此種操縱便稱為雀降。
空投時,為了保證翼傘落地時刻的速度得到有效的控制,必須在預定的雀降操縱時刻實施減速操作,而現有高度測量設備[5.6]如:GPS的測高誤差相對過大;氣壓高度計僅能在地面狀況已知時給出準確的測量信息,而且氣壓高度計的精度難以滿足翼傘實施雀降時對高度信息的精度要求;此外,超聲波測距計、雷達測距計和激光測距計受地面環境影響較大,面對茂密的叢林植被可能給出錯誤的高度信息,且雷達和激光測距計的成本相對較大,不適合空投系統的低成本要求。為此,本文采用聲波高度計[7]來提高高度測量信號的準確度。
1 聲波高度計測距原理
聲波高度計的測距原理與聲納和雷達類似,其基本原理[8]是利用聲波在空氣中的傳播速度c為已知,聲波發射器向反射面發射一組聲波脈沖,聲波遇到目標后必然有反射回波作用在接收換能器上,測量聲波從發射點至目標地傳輸所經過的時間,即當換能器發射出聲波開始計時,到聲波經空氣傳播至目標,再反射回傳播至聲波接收器停止計時,測得傳播時間t,由下式可以求出聲波發射點距目標之間的距離
(1)
2 聲波高度計系統總體方案設計
本文中設計的聲波高度計系統主要包括:主控制模塊、聲音發送模塊、聲音接收模塊、串口通信模塊以及電源模塊。系統的總體結構圖如圖1所示。
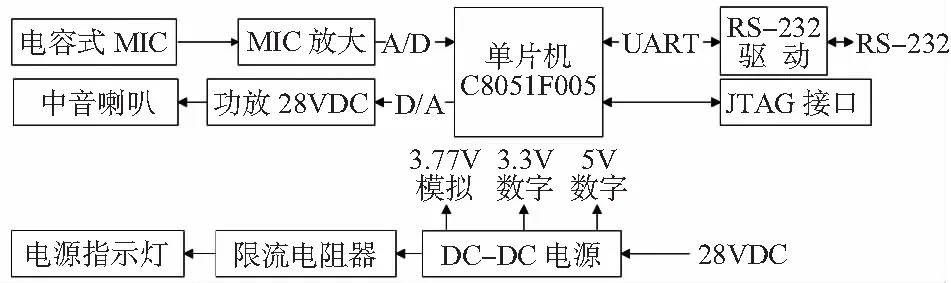
圖1 聲波高度計系統結構圖
聲波高度計系統的總體方案設計思想是在單片機的控制下,利用單片機內部的12位DA輸出一組固定頻率的脈沖信號并通過功放電路驅動喇叭發聲,用麥克風接收聲音信號并對信號進行放大,然后再經過單片機內部的A/D轉換器把回波信號轉換成數字信號,單片機通過RS—232與上位機進行通信,整個系統采用28V直流電源供電。
3 系統功能模塊硬件電路設計
根據上述的聲波高度計系統結構圖可知,系統主控制器單片機主要考慮其必須滿足:封裝小,帶有一定采樣精度的A/D,D/A,UART,片內JTAG仿真以及豐富的存儲空間等。綜合考慮上述主要因素,本文選擇了Cygnal公司的C8051F005單片機[9]作為主控芯片。
聲音發送模塊設計選取的是SGS公司生產的TDA2030A集成功放,該器件具有輸出電流大、諧波失真小、內部設有過熱保護、外圍電路簡單的特點。由于總體方案中用到的是28 V直流電源單電源供電,所以,這里選取TDA2030A的OTL電路。
聲音接收模塊采用常用的駐極體話筒接收聲波信號,該模塊要求對駐極體話筒受聲后采集到的微弱電平信號進行放大,放大后的信號再經過單片機內部的A/D轉換器轉換成數字信號,以觸發單片機的定時中斷。本設計選用低噪聲可變增益儀表放大器AD623進行前置放大。
電源模塊設計時由于電源轉換是28 V轉換到5 V,如果采用線性穩壓器的話,則消耗在線性穩壓芯片上的功率較大,效率也低,進而發熱較多,此外,線性穩壓電源的體積大,重量重,不適合本設計的微小型化。鑒于上述的考慮,本文中28 V轉5 V的電源轉換芯片采用TI推出的一種DC/DC降壓型開關電源轉換芯片TPS5410。此外,本文選用電源轉換芯片LM1117—3.3來獲得+3.3 V電源電壓,LM1117是一種正電壓輸出的低壓降三端線性穩壓器, 800 mA的輸出電流能夠滿足聲波高度計系統CPU正常工作時電流的需要。
本文設計的聲波高度計系統的詳細電路原理圖如圖2所示。
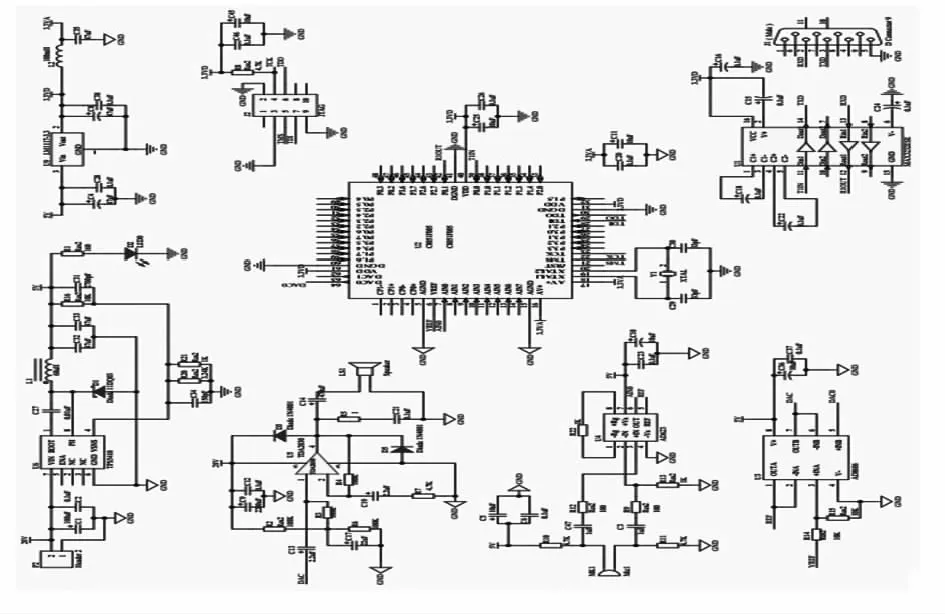
圖2 聲波高度計系統的詳細電路原理圖
4 系統軟件設計
為便于升級和維護,聲波高度計的軟件設計采用模塊化設計方法,每個模塊完成特定的功能。聲波高度計系統的軟件程序流程圖如圖3。其中主程序設計基本思想是[10]:利用定時/計數器T0控制聲波發射的周期,定時器T0定時周期地發射固定頻率(1 kHz)的脈沖信號,然后通過C8051F005單片機內部的12位DA0輸出。脈沖發送完畢后延時5 ms(延時5 ms是為了濾除掉由聲波高度計喇叭橫向直傳過來的聲音信號,以免其對回波信號的檢測產生影響),然后啟動單片機內部12位AD(AD啟動方式為定時器T3溢出)通道0進行回波信號采集,同時把采集到的信號存到數組中,A/D轉換結束后,對串口發送標志置1,然后用UART0串口通信將A/D轉換結果發送至上位機。
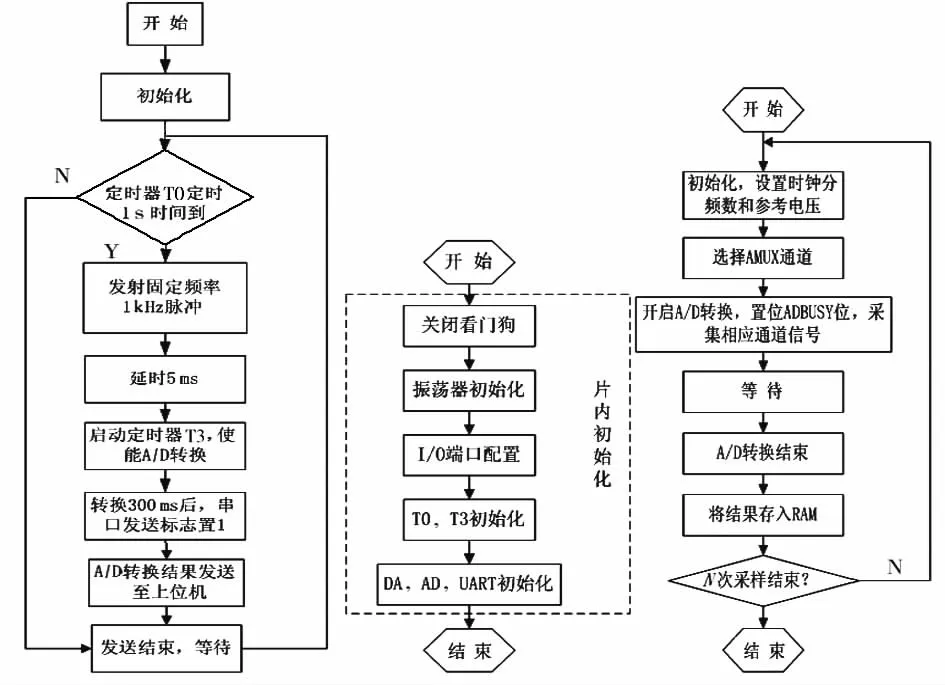
圖3 聲波高度計系統軟件程序流程圖
5 系統試驗
利用上文研制的聲波高度計系統分別進行了室內和室外的2種試驗,每種試驗中又分別做了不同反射面和不同高度情況下的試驗。本文的試驗結果均采用數據離線處理的方式。
試驗時,聲波采用的是1 kHz的正弦波脈沖信號,由C8051F005單片機控制內部的12位DA0輸出,串口通信的波特率設置為9 600,聲波高度計系統的AD采樣頻率采用的是8 kHz,每次采集300 ms數據,為了能把采集到的數據全部能發送至上位機上,試驗時利用定時器T0控制單片機每3.5 s發送一次聲波,每次發送5個脈沖信號。
5.1 室內試驗
由于在實驗室內條件有限,在室內只做了朝向天花板(距離2.4 m)的一組驗證性試驗,試驗時接收了5次回波信號,試驗結果如圖4所示,且經過高通濾波濾除掉低頻趨勢項后的單周期局部放大回波信號波形如圖5所示,試驗誤差統計結果如表1所示。
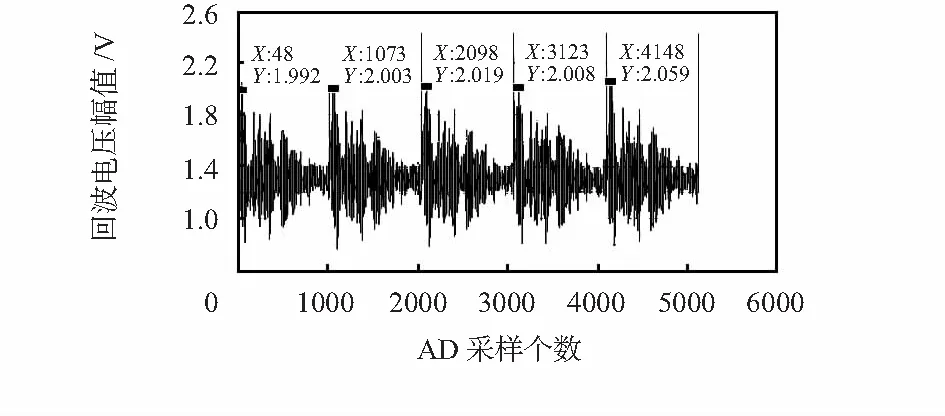
圖4 天花板反射的回波信號波形圖
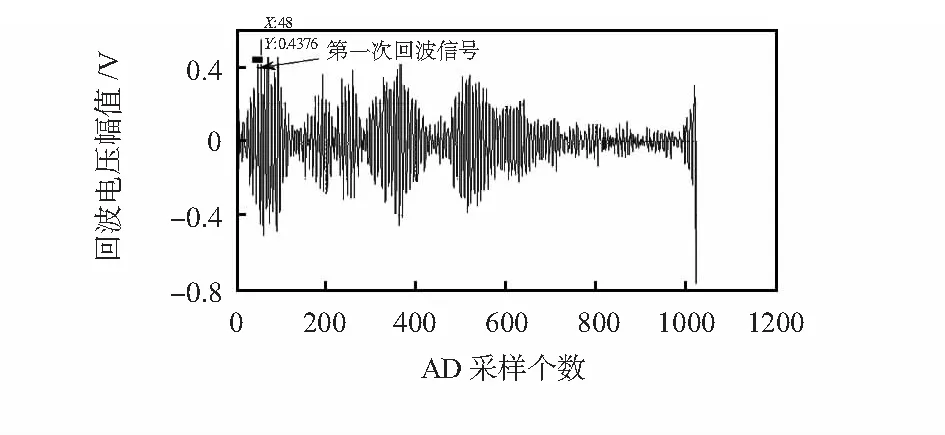
圖5 經高通濾波處理后的回波信號波形
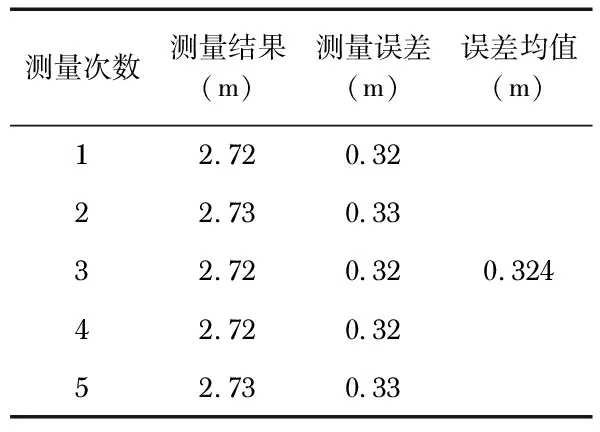
表1 室內到天花板的距離測量誤差統計結果
由上述結果可知,經高通數字濾波處理后的回波信號效果要好于局部放大后的回波信號效果,且測量誤差均值為0.324 m,符合聲波高度計的設計要求。此外,從圖5中還可看出:室內試驗一個測量周期內會收到多個回波,這是由于室內不是自由聲場,聲音信號在室內各個反射面之間來回反射造成的,這也會造成回波信號相互干擾而影響測量精度,所以,要進行室外自由聲場的試驗。
5.2 室外自由聲場中的試驗
為了研究本文研制的聲波高度計對空投時不同反射地面的適用性,分別針對灌木叢地面、草叢地面、水泥地地面和地板磚地面4種地面狀況做了不同高度下的多組試驗,每組試驗分別接收5次回波信號。針對灌木叢地面做了4.7 m高度下的試驗,試驗結果如圖6,高通濾波后的結果如圖7,誤差統計結果如表2。
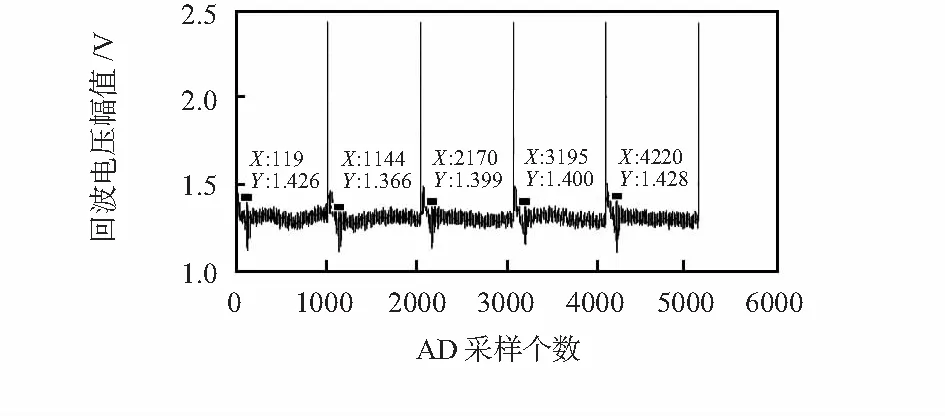
圖6 高度為4.7 m時的灌木叢地面回波信號
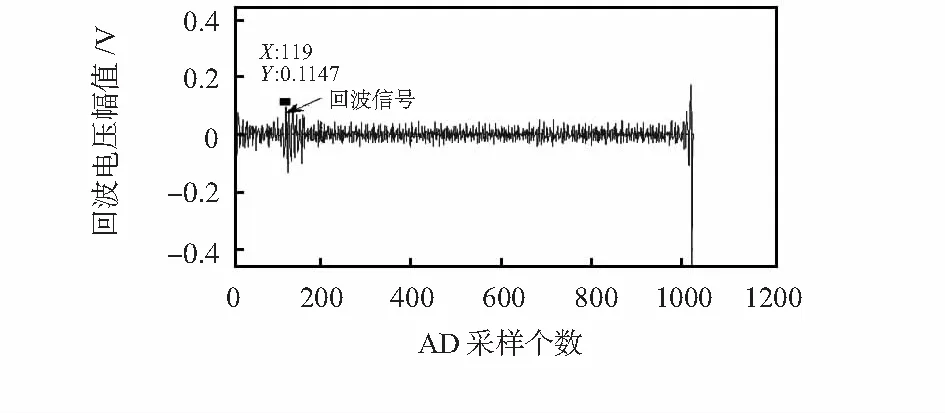
圖7 高通濾波處理后的局部放大回波波形
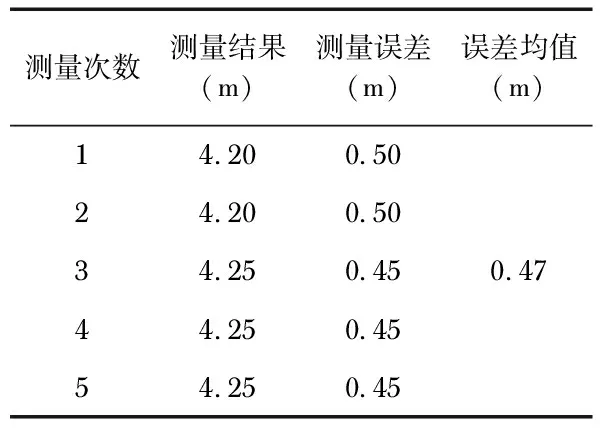
表2 高度為4.7 m時灌木叢地面的測量結果
此外,文中還針對草叢地面分別做了2.25,3.0,4.7 m高度下的試驗;針對水泥地地面分別做了3.0,12.0 m高度下的試驗;針對地板磚地面分別做了2.7,5.7 m高度下的試驗。試驗結果如表3所示。
通過比較上述針對不同試驗環境、不同反射地面、不同高度的試驗結果可知:聲波高度計系統在4種反射地面的不同高度情況下都能夠給出高度信息,且室內試驗的測量誤差均值0.324 m,室外試驗的最大測量誤差均值為0.814 m,各組試驗的量測誤差均值都在1 m以內,這說明在所做的試驗量測范圍內,聲波高度計原理樣機的高度測量精度滿足空投的要求。
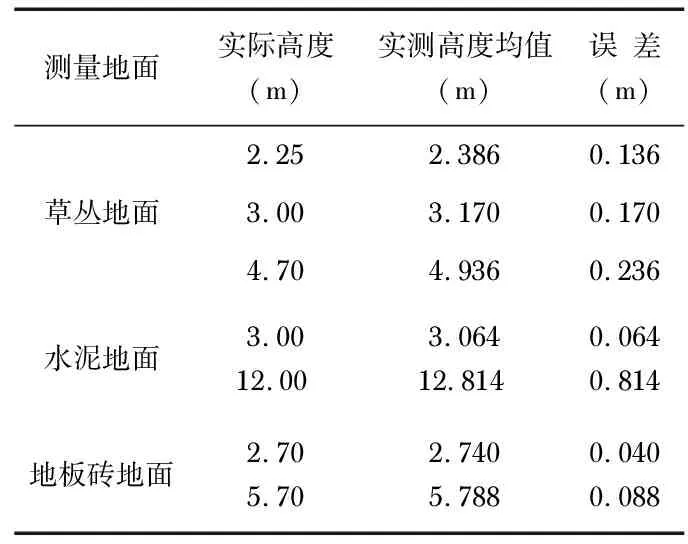
表3 室外試驗測量結果
分析上述的試驗結果還可以看出:地板磚地面上的試驗結果測量精度最高,水泥地地面上的測量精度次之,灌木叢地面上的測量精度最低。這是因為灌木叢地面比較粗糙,對聲音信號的反射效果最差,其測量誤差也是最大的,當高度為4.7 m時,其最大測量誤差為0.5 m。相對而言,光滑的地板磚能夠很好地反射聲音信號,其最高精度可達0.04 m。
6 結束語
為了提高空投翼傘雀降時高度測量信號的準確度,本文提出了采用聲波高度計進行高度測量。首先完成了聲波高度計系統的軟硬件設計,并利用設計的聲波高度計系統在室內和室外針對不同反射面,包括室內天花板、室內墻面、室外草叢地面、室外灌木叢地面、室外水泥地面和室外地板磚地面,分別進行了不同高度的試驗研究和結果分析。多組試驗數據的事后處理表明:研制的聲波高度計在所做的試驗量測范圍內,其測量精度滿足空投的要求,驗證了該系統可在空投時針對不同的地面狀況具有一定的適用性。
參考文獻:
[1] 于成果,李良春.精確空投系統分析[J].兵工自動化,2007,26(4):6-7.
[2] 陳 宇.精確空投:用GPS送“軍糧”[N].中國國防報,2009—12—22(15).
[3] 王利榮.降落傘理論與應用[M].北京:宇航出版社,1997.
[4] 趙秋艷.翼傘雀降技術[J].航天返回與遙感,1999,20(2):5-9.
[5] Tavan Steve,Noetscher Greg.Advanced sensors for precision airdrop[R].AIAA2009—2951,2009.
[6] Stein J M,Madsen C M,Strahan A L.An overview of the guided parafoil system derived from X—38 experience[C]∥18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Arlington,Virginia,2005:1652-1665.
[7] Ulich Bobby,Steele Kenneth.A sodar height sensor for rrda-s[R].Restom,VA:American Insitute Aeronautics and Astronautics,2003.
[8] 杜清懷,胡立新,張 棟.聲波測距定位系統在淺海地震采集作業中的應用[J].石油儀器,2004,18(6):17-20.
[9] Cygnal Intergrated Products Inc.C8051F0XX Development Kit User’s Guide[Z].Silicon Laboratories,2001.
[10] Cygnal Intergrated Products Inc.C8051F單片機應用解析[M].北京:北京航空航天大學出版社,2002:411-419.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
