他勵直流電動機精確線性化自適應控制
2014-09-23 03:20:26史曉陽
電子設計工程 2014年13期
關鍵詞:設計
史曉陽
(海軍裝備部西安局 陜西 興平 713107)
他勵直流電動機精確線性化自適應控制
史曉陽
(海軍裝備部西安局 陜西 興平 713107)
基于他勵直流電動機數學模型,研究了輸出函數對于非線性控制器設計的影響。通過選擇不同輸出函數,應用精確線性化理論和極點配置方法,設計了轉速狀態反饋線性化控制器和輸入輸出反饋線性化控制器。理論推導發現,輸入輸出線性化控制器是全局穩定的,而狀態反饋線性化控制器由于存在奇點,而不是全局能控的。將兩種控制器的控制效果進行仿真對比,結果表明,輸入輸出反饋線性化控制器與狀態反饋線性化控制器相比,控制器結構簡單、動態性能好、運行穩定。在輸入輸出反饋線性化控制器的基礎上,設計了輸入輸出反饋線性化控制器的自適應控制器。仿真結果表明,自適應控制器的抗系統參數變化干擾能力相比于輸入輸出反饋線性化控制器有明顯提高。
狀態反饋;輸入輸出反饋;李亞普諾夫函數;奇點
近年來,非線性控制理論的迅速發展使得其在系統建模和系統控制中的應用成為可能。其中,反饋線性化的方法引起了學者的廣泛關注,它的核心思想是把一個非線性系統代數的轉化為一個(全部或者部分)線性系統,以便可以應用線性系統成熟的設計方法[1-2]對非線性系統進行設計。這種方法已經廣泛的應用到了開關變換器控制[3],電動機控制[4-5],水利系統[6]等領域。目前,反饋線性化在控制領域的研究,大多是采用狀態反饋線性化的方法以實現非線性系統的完全線性化。但是狀態反饋線性化需要滿足嚴格的能控性條件和對合條件,而且存在控制器結構復雜,不利于工程實現等缺點。從實用角度來看,實現非線性系統完全精確線性化并不比部分精確線性化更為理想[7]。
本文基于他勵直流電動機非線性模型,通過選擇不同的輸出函數,設計了狀態反饋線性化轉速控制器和輸入輸出反饋線性化轉速控制器。通過理論推導和系統仿真,比較了兩者的控制器結構,穩定運行區域,動態性能。結果表明,輸入輸出反饋線性化控制器相比于狀態反饋控制器具有更好的控制性能,且控制器結構簡單,更具有實用價值。在電動機運行過程中,電動機的負載、勵磁電阻和電樞電阻會發生變化,這將嚴重影響控制器的控制性能,為了提高控制器抗參數變化干擾的能力,在輸入輸出反饋線性化控制器的基礎上,設計了輸入輸出反饋線性化的自適應轉速控制器。
1 他勵直流電動機非線性模型
電動機控制的目標是控制電動機轉速按照期望的指標運行。對于他勵直流電動機非線性系統,選取電機轉動角速度,電樞電流,勵磁電流作為狀態變量,即x=(ω iair)T。選勵磁電壓ur為控制量,即u=ur,系統狀態方程[8]可寫為

設電動機穩態轉速x1m=wm時,解方程組
由計算結果可知,對于給定的穩態轉速wm,有兩組穩態勵磁電壓、電樞電流、勵磁電流。容易看出,b組數據對應的穩態平衡點是物理上無法實現的,a組數據對應的平衡點是我們期望的電動機運行平衡點。所以當系統控制達到穩態轉速wm時,期望的穩態電樞電流為x2ma,穩態勵磁電流為x3ma。
2 精確線性化極點配置控制器設計
2.1 狀態反饋線性化控制器設計


則在此坐標下得到狀態反饋線性化控制輸入為:

其中,v為線性化虛擬輸入,Zm為z˙3中不包含控制信號 u的項。經坐標變化和狀態反饋變換后,原非線性系統轉化為線性化系統。
顯然,線性化后的系統是能控的線性系統,應用線性系統極點配置法設計閉環,即 v=-k1z1-kz2-k3z3(其 k1,k2,k3>0 中)。則加入閉環控制的控制規律為


2.2 輸出反饋線性化控制器設計
在此坐標下得輸出反饋線性化

應用極點配置法設計非線性控制器的閉環,即v=-kz1(k>0)。


2.3 仿真實驗
為了比較兩種控制器的控制效果,本文使用Matlab中的Simulink對所建系統的模型進行仿真。他勵直流電動機的負載額定轉矩為29.2 N·m,電樞電壓為240 V,電樞電阻為0.6 Ω,電樞電感為0.012 H,勵磁回路電阻為240 Ω,勵磁回路電感為0.12 H,電樞與勵磁回路互感為1.8 H,轉動慣量為1.0kg·m2,電勢常數取經驗值k=15,額定轉速為100 rad/s。
圖1為電動機額定狀態下,狀態反饋線性化控制器和輸出反饋線性化控制器啟動和調速的轉速響應曲線。為了考察系統的動態性能,在5 s時調節控制規律,使電動機轉速從100 rad/s穩定到127 rad/s。
從圖中可以看出,基于反饋線性化設計的電動機閉環轉速控制器具有很好的動態性能。其中,輸出反饋控制器相比于狀態反饋控制器具有啟動快,調速迅速,超調小等優點。
仿真過程中發現,輸入輸出反饋線性化控制器的結構比狀態反饋線性化控制器簡單的多,更利于工程實現。而且,狀態反饋控制器由于不是全局能控的,當閉環反饋系數或者電動機初始值取值某些值時,控制器會出現控制失效現象,這就使得控制器閉環設計復雜,運行穩定性降低。綜上所述,對于他勵直流電動機非線性系統,輸入輸出反饋線性化控制器相比于狀態反饋線性化控制器是更好的選擇。
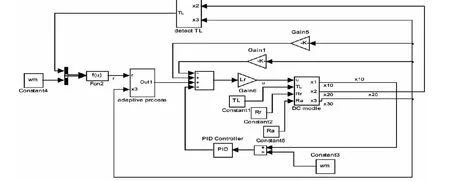
圖2 輸入輸出反饋線性化自適應控制仿真圖Fig.2 Simulation block diagram of input-output feedback linearization adaptive control
3 輸入輸出線性化自適應控制器設計
電動機在運行過程中,電機負載不可能嚴格穩定在額定負載值,而且隨著電動機運行,勵磁電阻和電樞電阻會有很大的漂移,這都會嚴重影響控制器的控制性能。為了提高控制器抗參數不確定性干擾能力,在上述研究的基礎上設計了輸入輸出反饋線性化自適應控制器。
3.1 控制器設計
輸入輸出反饋線性化自適應控制器是由上述輸入輸出線性化控制器、負載檢測反饋環路和自適應環節構成,如圖2所示。
其中,負載檢測環路通過在線辨識負載變化,并將實際負載值實時反饋到控制器,在電動機運行過程中不斷調節控制器的參數,以達到抑制負載變化的效果。
電機溫升是由于電機發熱而引起的電機與周圍環境的溫度差。溫升對直流電動機的影響主要體現在勵磁繞組和電樞繞組電阻隨溫度變化的熱效應[9]。
選定20℃時的電阻為R0,金屬材料的電阻隨溫度變化的關系可近似表示為

電機的溫升與電機運行時間的關系可以近似的表示為

其中,α為電阻溫升系數,T為電阻溫度,Tn為電機穩態溫升,τ為材料的發熱時間常數。將 式(10)代入(9)式得繞組電阻隨電機運行時間的關系式為

根據中小型旋轉電機安全通用要求標準[10],經計算可知:α=0.003 93(純銅)Tn=145,τ=80。
自適應環節用于抑制形式如式(11)所示的勵磁電阻和電樞電阻隨電機運行時間變化對控制器的影響。
3.2 仿真實驗
為了考察自適應控制器的抗參數不確定性干擾能力,本文分別為自適應控制器和輸入輸出反饋線性化控制器加上階躍變化的負載干擾和電機溫升引起的繞組電阻變化干擾,比較兩個控制的控制效果。圖3為5 s時在電動機轉矩控制端加入大小為10 N·m的干擾力矩,系統的轉速響應曲線。從圖中可以看出,自適應控制器能夠迅速的消除負載變化引起的電動機轉速波動。

圖3 力矩干擾下轉速響應曲線Fig.3 Speed response curve with disturbance torque
圖4為加入電機溫升引起的繞組電阻變化干擾后,系統的轉速響應曲線。從圖中可以看出,自適應控制器能夠很好的抑制繞組電阻變化對系統的干擾,準確迅速地將電動機控制到指定的轉速。
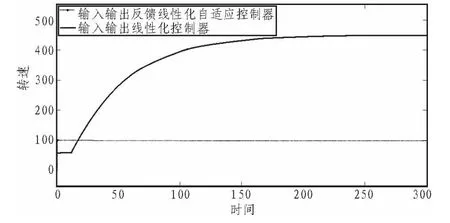
圖4 電阻變化干擾下轉速響應曲線Fig.4 Speed response curve with resistance variation interference
4 結論
本文基于他勵直流電動機數學模型,應用精確線性化理論,設計了輸入輸出反饋線性化和狀態反饋線性化閉環轉速控制器。理論推導表明,對于他勵直流電動機非線性模型,輸出反饋線性化會比狀態反饋線性化控制器具有更大的穩定控制區域。仿真過程中發現,由于狀態反饋控制器存在奇點,不是全局能控的,極點配置參數、穩態轉速的設定和初始狀態都會影響控制過程中系統的狀態軌跡,從而可能使系統運行到奇點區域,出現控制器失效現象。這就使得控制器閉環設計變得復雜,且大多情況下無法選擇最優的閉環控制參數。相比而言,輸出反饋線性化控制器具有動態調速性能好;結構簡單,易于工程實現;控制器運行穩定;系統閉環設計簡單靈活等優點。在輸入輸出反饋線性化控制的基礎上,設計了輸入輸出反饋線性化自適應控制器,仿真結果表明自適應控制器在電機參數不確定情況下具有很好的控制性能。
[1]程代展.應用非線性控制[M].北京:機械工業出版社,2006.
[2]賀昱曜,閆茂德.非線性控制理論及應用[M].西安:西安電子科技大學出版社,2007.
[3]帥定新,謝運祥,王曉剛,等.Boost變換器非線性電流控制方法[J].中國電機工程學報,2009,29(15):15-21.
SHUAI Ding-xin,XIE Yun-xiang,WANG Xiao-gang,et al.Nonlinear current control method for boost converter[J].Proceedings of the CSEE,2009,29(15):15-21.
[4]孟昭軍,孫昌志,安躍軍,等.狀態反饋精確線性化永磁同步電動機轉速控制[J].中國電機工程學報,2007,11(1):21-28.
MENG Zhao-jun,SUN Chang-zhi,AN Yue-jun,et al.Speed control of permanentmagnet synchronousmotor based on exact linearization via state variable feedback[J].Proceedings of the CSEE,2007,11(1):21-28.
[5]曹建榮,虞烈,謝友柏.磁懸浮電動機的狀態反饋線性化控制[J].中國電動機工程學報,2011,21(9):22-26.
CAO Jian-rong,YU Lie,XIE You-bai.Dynamic feedback linearization control for induction type bearingless motor[J].Proceedings of the CSEE,2011,21(9):22-26.
[6]鮑海燕,楊建東,付亮.基于微分幾何的水電站過渡過程非線性控制[J].水利學報,2010,41(11):1339-1345.
BAO Hai-yan,YANG Jian-dong,FU Liang.Nonlinear control of the transient process in hydropower station based on differential geometry theory [J].Journal of Hydraulic Engineering,2010,41(11):1339-1345.
[7]李嘯驄,程時杰,韋化,等.輸出函數在單輸入單輸出非線性控制系統設計中的重要作用[J].中國電動機工程學報,2004,24(10):50-55.
LI Xiao-cong,CHENG Shi-jie,WEI Hua,et al.Importanl effection of the output function in siso nonlinear control system design[J].Proceedings of the CSEE,2004,24(10):50-55.
[8]李殿璞.非線性控制系統理論基礎[M].哈爾濱:哈爾濱工業大學出版社,2006.
[9]陳旭東,馮攀.溫升對并勵直流電動機性能的影響[J].微特電機,2011,7:25-28.
CHEN Xu-dong,FENG Pan.Influnce of Temperrature rise on shunt DC motor performance[J].Special Electrical Machines,2001,7:25-28.
[10]中華人民共和國國家標準[S].中小型旋轉電機安全通用要求,GB14711-93.
Adaptive speed control for separately excited DC motor based on exact linearization method
SHI Xiao-yang
(Xi'an Bureau of Naval Armament Department,Xingping 713107,China)
Based on the mathematical model of separately excited DC motor,the influence of output functions to nonlinear controller is studied.Exact linear theory and the pole assignment method are used to design state feedback linearization speed controller and input-output feedback speed linearization controller by selecting different output functions.The theoretical analysis found that the input-output linearization controller is globally stable.Due to the presence of singular points,state feedback linearization controller is not a global controller.The simulation results show that input-output feedback linearization controller has a more simple structure,better stable operation and dynamic performance compared to state feedback linearization controller.On the basis of input-output linearization controller,the input-output feedback linearization adaptive controller is designed.The simulation results show that the adaptive controller has a stronger anti-interference capability compared to input-output feedback linearization controller.
state feedback;input-output feedback;Lyapunov function;singularity
TN-9
A
1674-6236(2014)13-0175-04
2013-10-13 稿件編號:201310066
史曉陽(1987—),男,河北隆堯人,碩士,助理工程師。研究方向:電力電子與電機拖動。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04