遠距離超聲測距傳感器激勵脈沖研究*
2014-09-20 07:55:48琚曉濤谷立臣閆小樂
傳感器與微系統 2014年1期
關鍵詞:信號
琚曉濤, 谷立臣, 閆小樂
(1.西安建筑科技大學 機電學院,陜西 西安 710055;
2.西安科技大學 理學院,陜西 西安 710055)
0 引 言
超聲測距技術作為一種以超聲波為信息載體的非接觸式檢測手段,與紅外傳感技術、雷達技術等相比,可以全天候工作,具有成本低、可靠性好、不易受光線、粉塵、煙霧、電磁干擾影響等優點[1]。超聲測距技術已廣泛應用于現場機器人導航、車輛安全避障系統、物位測量等工業領域[2]。然而,目前超聲波空氣測距技術作用距離較短(一般小于15 m),使其應用范圍受到了極大的制約[3]。遠距離超聲波測距技術不僅依賴于高性能的超聲傳感器,而且與超聲波激勵脈沖有關。超聲發射電路設計和超聲波激勵脈沖選擇均直接影響到超聲波發射功率。
本文通過對典型超聲傳感器激勵脈沖的功率譜分析,設計了雙極性發射電路,增大了超聲傳感器的發射功率,提高了超聲波測距的探測距離。
1 超聲傳感器工作機理
遠距離超聲測距系統的核心部件是超聲傳感器,其基本原理是通過測量超聲發射脈沖和回波脈沖的時間間隔Δt實現的。障礙物與傳感器之間的距離由式(1)可得
d=c·Δt/2.
(1)
其中,波速c通過測量環境溫度間接獲得[4]。
在選擇超聲傳感器時,應綜合考慮諧振頻率、指向性、工作電壓等技術指標。本文選用的為壓電陶瓷防水型超聲傳感器,它被廣泛應用于介質為空氣的測距場合。
壓電陶瓷超聲傳感器通常包括一個電能儲存元件和一個機械振動系統[5]。當超聲傳感器處于發射狀態時,激勵信號將引起電能儲存元件中電場的變化,通過逆壓電效應對傳感器的機械振動系統產生一個推動力,從而向空氣中輻射超聲波。從能量的角度來考慮,發射傳感器將電能轉換成機械能,再轉換成聲能
Pa=Peηmeηma.
(2)
其中,Pa為發射聲功率,Pe為激勵脈沖電功率,ηme為機電轉換效率,ηma為機聲轉換效率。
2 超聲激勵脈沖功率譜分析
由超聲傳感器的工作原理分析可知,超聲發射功率與超聲傳感器激勵脈沖電功率、機電轉換效率、機聲轉換效率有關。針對某一確定的超聲傳感器來講,機電轉換效率、機聲轉換效率是一定的,這里主要探討超聲發射功率與典型激勵脈沖之間的關系。
對矩形波、三角波、正弦波3種典型激勵脈沖進行功率譜分析,研究其頻率分布情況。圖1中的(a),(b),(c)分別用來模擬脈寬為400 μs、頻率為22 kHz的矩形波、正弦波、三角波3種雙極性高壓激勵脈沖。圖2(a)體現了矩形波超聲激勵脈沖功率譜圖,雖然矩形波脈沖含有多次諧波,但主要能量集中在22 kHz,且頻率成份較大;圖2(b)體現了正弦波超聲激勵脈沖功率譜圖,正弦波僅含有22 kHz單一頻率;圖2(c)體現了三角波超聲激勵脈沖功率譜圖,其中有少量諧波。從圖中可以直觀地看出:雖然3種類型的脈沖都含有基頻成份,但在22 kHz頻率點上矩形波功率最大。從發射功率上來講,矩形波脈沖發射效果最好,正弦波脈沖次之,三角波脈沖最差。
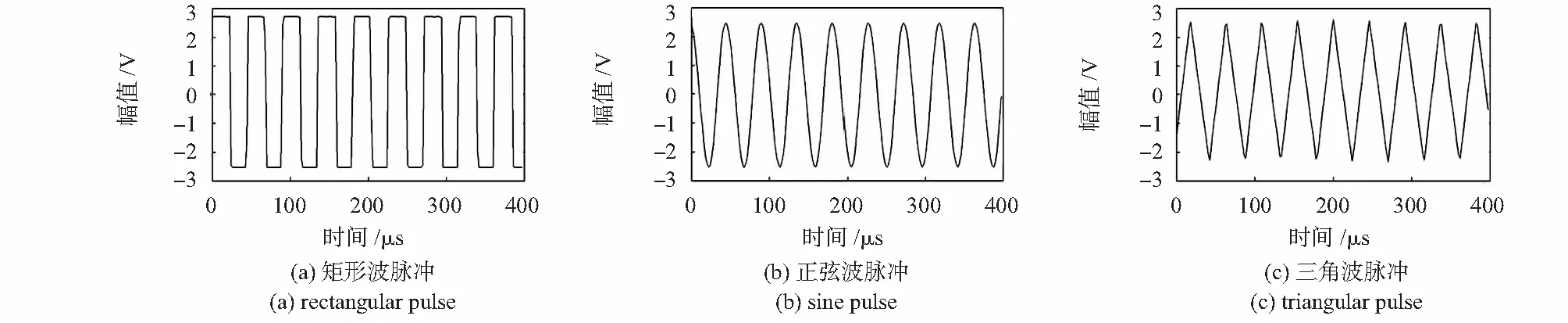
圖1 超聲激勵脈沖
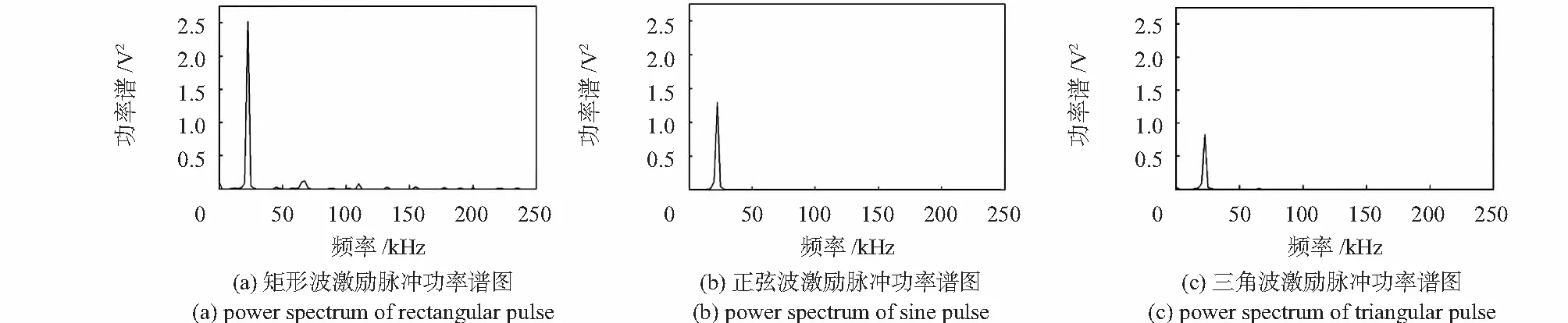
圖2 超聲波激勵脈沖功率譜圖
3 雙極性超聲發射電路設計
實現遠距離空氣超聲波測距,不僅僅需要使超聲傳感器具有較大的發射功率,還需要易于實現超聲波形的控制,例如:對脈沖的幅值、個數、頻率和占空比等參數的調整。
超聲傳感器的發射功率一般隨著工作頻率而變化,在與其機械諧振頻率相等時,傳感器機械振動系統的逆壓電效應最明顯,可以獲得最大的發射聲功率[6]。矩形脈沖激勵信號作為一個與傳感器壓電振子諧振頻率相等的交流信號,其實現方式通常有振蕩—放大型和逆變型2種:第一種方式利用振蕩電路產生小功率激勵信號,再經脈沖變壓器升壓后驅動傳感器工作。這種方式能夠獲得高壓激勵信號,具有易于實現阻抗匹配等優點,但脈沖不易進行波形參數的控制,電路實現較為復雜[7,8]。第二種方式利用逆變原理將經整流的直流電變為超聲頻交流電[9]。這種方式將直流電源功能與控制變換功能分開,具有易于實現超聲波形參數控制的優點。
基于以上考慮,本文利用雙極性PWM控制逆變原理,將直流電源經AC/DC轉換后,通過“H”型控制電路輸出交流激勵信號,其電路原理圖如圖3所示。其工作原理是:由微控制器輸出的超聲脈沖控制信號,經過高速光電耦合器,進入“H”型變換電路的左、右端口。橋式變換電路由6只高速、大功率三極管組成,均工作在飽和導通狀態。通過T1,T4和T2,T3 配對的工作實現超聲傳感器兩端的交流驅動。該電路不僅可以容易控制超聲發射脈沖參數,另外,由于其峰峰電壓值比常規驅動電路翻了1倍,還有效降低了驅動電路的直流電壓,具有較大的峰值電流,提高了帶載能力。
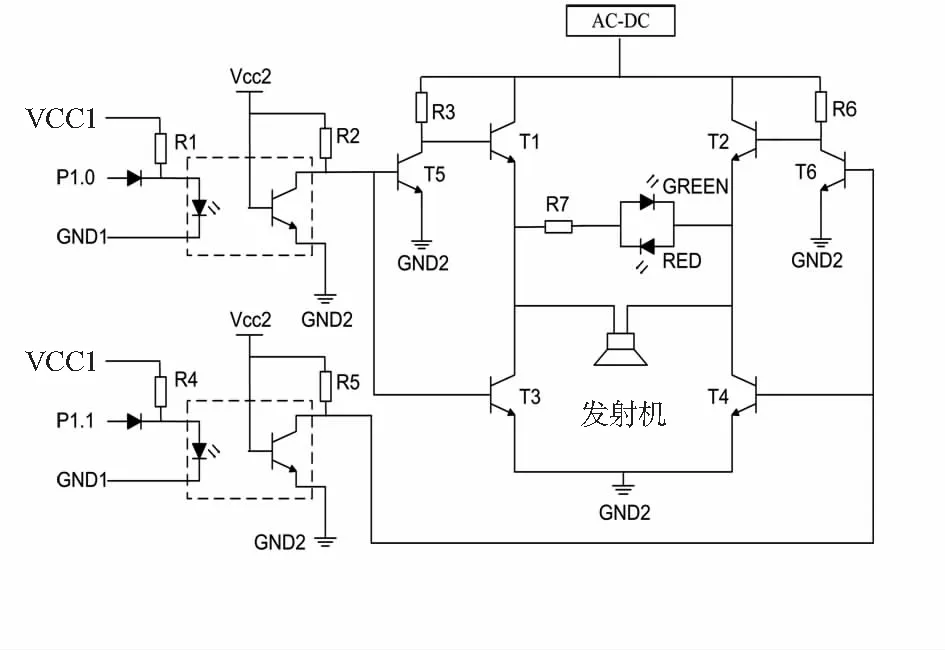
圖3 雙極性超聲波發射電路圖
4 超聲波激勵脈沖實驗研究
4.1 典型超聲激勵脈沖實驗
為了驗證不同激勵脈沖對超聲發射功率的影響,將接收傳感器和發射傳感器間距1 m對射方式放置,將函數信號發生器電壓調節為10 V,函數信號發生器頻率調節為22 kHz,激勵源信號選擇三角波、正弦波、矩形波,測量回波信號。3種激勵信號下的回波幅值比較如表1所示。
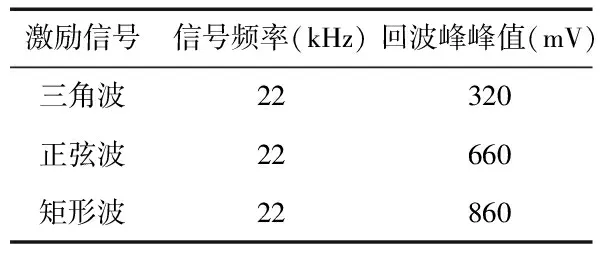
表1 超聲回波峰峰值
由表2可見,矩形波激勵脈沖回波峰峰值最大,正弦波激勵脈沖回波峰峰值次之,三角波激勵脈沖峰峰值最小,與前面的功率譜仿真分析結果是一致的。矩形激勵脈沖的發射功率最大,向空氣中輻射的能量也就越大,有利于實現遠距離空氣超聲波測距。
4.2 超聲波激勵脈沖電壓實驗
雙極性發射電路中所需的AC/DC模塊輸出的激勵電壓決定著超聲傳感器的發射功率。激勵電壓過大,會增加AC/DC模塊制作成本和難度,超過耐壓值后會對超聲傳感器內部電路和機械部分造成損壞。為確定激勵電壓,將超聲發射傳感器與接收傳感器正對1 m放置,利用設計的雙極性發射電路不斷調整激勵電壓。如圖4所示,根據激勵電壓與回波信號強度實驗曲線,可以推斷當超聲傳感器激勵電壓為320V時,回波幅值達到最大值的95 %,能夠發射大功率超聲波。
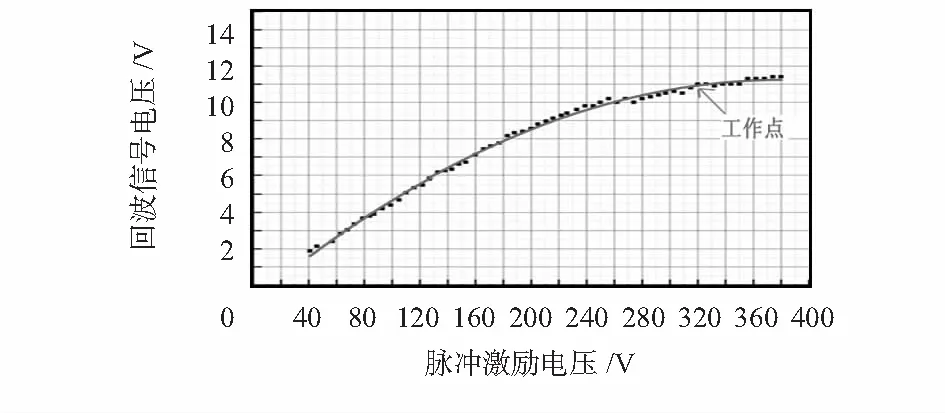
圖4 超聲激勵電壓與回波強度曲線
4.3 超聲激勵脈沖個數實驗
超聲傳感器激勵信號是以脈沖序列的方式來發射的,每個脈沖序列中包含一定數量的矩形脈沖。脈沖個數太少無法產生足夠的能量激勵超聲傳感器正常工作;而脈沖數量越多,盲區就越大[10]。為確定合適的激勵脈沖個數,將發射傳感器與接收傳感器正對放置,距離分別為1,5,7 m,測量超聲回波。超聲發射傳感器激勵信號為矩形脈沖信號,幅值為320 V,環境溫度為16 ℃。
圖5給出了超聲回波最大振幅與發射傳感器激勵脈沖個數關系的實驗曲線。從圖5可以看出:當超聲傳感器激勵脈沖為10個時,其幅值已達到最大幅值的90 %左右。同時,在滿足較大發射功率的前提下,超聲脈沖個數選為10個時盲區最小。

圖5 超聲回波最大振幅與脈沖個數關系曲線
4.4 超聲波脈沖測距實驗
超聲波激勵信號和回波信號分別經模/數轉換后,通過數據總線傳輸并記錄在計算機上。數據采樣頻率為200 kHz,接收端放大器的電壓增益為60 dB。系統使用LabVIEW軟件完成超聲波激勵控制信號和超聲回波的同步采集、存儲以及分析等功能。實驗時,發射傳感器與接收傳感器同一水平放置,正對平板障礙物,其尺寸為120.0 cm(寬)×84.5 cm(高)×2.2 cm(厚),實驗環境溫度為29 ℃,測距實驗結果如表2所示。
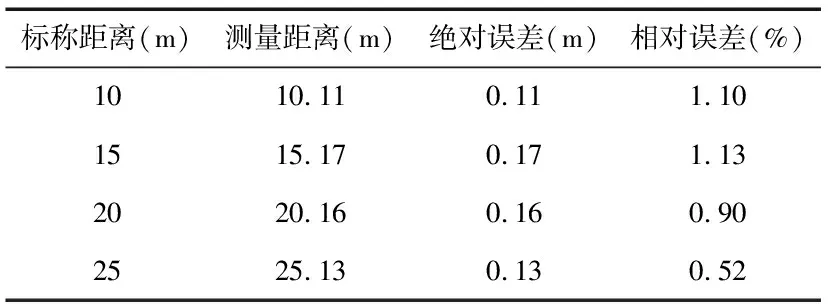
表2 超聲波測距實驗結果
5 結 論
1)通過對典型激勵脈沖的功率譜分析可知,矩形波脈沖激勵超聲發射傳感器發射功率最大。
2)針對本文選擇的超聲傳感器,當超聲傳感器被10個峰峰值為640 V的矩形波脈沖激勵時,具有較大的發射功率,為合理選擇遠距離超聲測距激勵脈沖提供了依據。
3)雙極性超聲發射電路長時間工作,所用元器件均無過熱現象。激勵出的大功率高壓超聲脈沖波形易于控制,能夠穩定、可靠地檢測25 m處的障礙物。
參考文獻:
[1]Yan Xiaole, Gu Lichen.Time-delay estimation of ultrasonic echoes based on the physical model matching[C]∥8th IEEE International Conference on Automation Science and Engineering,Seoul, Korea,2012.
[2]張和生,宋明耀.車載超聲測距儀的研制[J].儀表技術與傳感器,2003(2):26-28.
[3]祝 琴,王 琪,劉 浩.大量程超聲波測距系統[J].兵工自動化,2009,28(8):35-37.
[4]Parrila M,Anaya J J,Fritsch C.Digital signal processing techniques for high accuracy ultrasonic range measurements[J].IEEE Transaction on Instrumentation and Measurement,1991,40(4):759-763.
[5]林書玉.超聲換能器的原理及設計[M].北京:科學出版社,2004:1-3.
[6]鄭音飛,陳裕泉.超聲換能器發射激勵能量利用率的研究[J].傳感技術學報,2007,20(2):374-376.
[7]Svilainis L, Motiejūnas G.Power amplifier for ultrasonic transducer excitation[J].Ultragarsas (Ultrasound), 2006,58(1):30-36.
[8]隋衛平,潘仲明,王躍科.一種新型的超聲換能器驅動與回波檢測電路設計[J].國防科技大學學報,2004,26(3):107-111.
[9]高 睿,趙 輝.超聲波物位計收發電路設計[J].計量技術,2010 (5):12-15.
[10] 簡 盈,王躍科,潘仲明.超聲換能器驅動電路及回波接收電路的設計[J].自動化與儀器儀表,2004 (11):31-34.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06