基于Fisher信息距離的被動傳感器目標協(xié)同跟蹤方法
2014-09-20 07:52:24王勇
傳感器與微系統(tǒng) 2014年7期
關鍵詞:信息
王 勇
(1.中國礦業(yè)大學 信息與電氣工程學院,江蘇 徐州 221116;2.徐州工業(yè)職業(yè)技術學院,江蘇 徐州 221140)
0 引 言
隨著現(xiàn)代戰(zhàn)爭的需要和傳感器技術的迅速發(fā)展,多傳感器數(shù)據(jù)融合技術得到了廣泛的應用。在現(xiàn)有的多傳感器目標跟蹤系統(tǒng)中, 傳感器的多樣性和信息來源的廣泛性和復雜性,不僅限制了對傳感器信息資源的有效利用,而且嚴重影響了傳感器的合理使用。因此,研究對有限的傳感器資源進行科學合理的分配,實現(xiàn)多傳感器的協(xié)同探測已成為目前亟待解決的問題[1]。
從信息論的角度出發(fā),當傳感器對目標定位時或被跟蹤目標的狀態(tài)估計的精確度提高時目標的信息有所增加,即通過傳感器對目標的觀測使目標的位置估計得到更新,從而減少了目標位置的不確定性。文獻[2]在對目標的狀態(tài)估計過程中,將信息增量的含義推廣為在獲得新的量測條件下,定量表述目標狀態(tài)不確定性的改變,并且將信息熵定義為估計誤差協(xié)方差矩陣形式。文獻[3]則根據(jù)Rényi差異求得信息增量,并基于此解決了大規(guī)模動態(tài)網絡的傳感器資源管理問題。文獻[4]通過貝葉斯網絡建立量測過程模型,采用分辨力增量實現(xiàn)異類傳感器融合中目標分類的最優(yōu)化。文獻[5]針對傳感器網絡中機動目標跟蹤問題,提出了一種基于Rényi信息增量的機動目標協(xié)同跟蹤方法。文獻[6]利用信息增量對被動傳感器資源分配算法進行了研究。最近,文獻[7]利用信息幾何理論,以Fisher信息距離來定義目標之間的區(qū)分度,并直接依據(jù)目標之間的區(qū)分度制定傳感器資源分配策略。
本文針對多被動傳感器目標跟蹤問題,在無跡卡爾曼粒子濾波算法的框架下,利用Fisher信息距離來計算觀測到來之前的先驗概率密度函數(shù)和獲得觀測后的后驗概率密度函數(shù)之間的信息增量,選擇信息增量最大的傳感器進行目標跟蹤。仿真實驗表明:本文所提算法能夠顯著提高目標的跟蹤精度,實現(xiàn)協(xié)同跟蹤。
1 Fisher信息距離
1.1 基本理論
考慮如下概率分布族
P=p(x;ζ).
(1)
其中,x為隨機向量,ζ=(ζ1,ζ2,…,ζn)為概率分布的參數(shù),它是一個包含n個元素的向量。每一個參數(shù)ζ對應一個概率分布p(x;ζ)。從幾何的觀點來看,概率分布族P可以看做高維空間中的n維流形。在統(tǒng)計流形中,流形上的每一個點代表了一個概率分布函數(shù),因此,概率密度函數(shù)之間的差異可以用流形中點之間的距離來度量,通常采用隨機變量的Fisher信息作為度量張量,其定義如下[7]
(2)
其中,ζ1和ζ2分別對應概率密度函數(shù)p(x;ζ1)和p(x;ζ2),則概率密度函數(shù)p(x;ζ1)和p(x;ζ2)之間的距離即為統(tǒng)計流形中對應點ζ1和ζ2之間的距離;[gij]為Fisher信息矩陣,各元素定義如下
(3)
此處E[·]表示關于p(x)的期望,也就是
(4)
在信息幾何理論中,由于每個概率分布函數(shù)都被抽象為統(tǒng)計流形上的一個點,潛移默化實現(xiàn)了“去隨機性”。因此,信息幾何有潛力將統(tǒng)計學中的隨機性問題變?yōu)橐粋€確定性問題來求解,實現(xiàn)現(xiàn)有方法的革新。
1.2 Fisher信息距離的計算
直接計算Fisher信息距離需要大量的計算資源。本文采用文獻[7]給出的基于完全的Isomap(isometric feature mapping)算法的Fisher信息距離近似求解方法。結合本文背景,具體算法步驟如下
2)對距離矩陣DG進行初始化

(5)
由于本文是在無跡卡爾曼粒子濾波的框架下進行跟蹤,故
(6)
其中,wk為k個粒子的權值,p(z|xk)為似然函數(shù),p(z)為觀測的邊緣分布函數(shù),其表達式為
(7)
3)對距離矩陣中每個元素依次進行遍歷,用D(i,j),D(i,d)+D(d,j)中較小的值來替換D(i,j),d=1,2,…,M,從而得到距離矩陣DG,并得到DF(p1,p2)。
2 基于Fisher信息的被動傳感器協(xié)同跟蹤
2.1 多被動傳感器資源協(xié)同分配模型
設被動傳感器跟蹤系統(tǒng)中有Ms只傳感器,各被動傳感器使用成本相同且已進行時空對準,每只傳感器能夠探測和跟蹤的最大目標數(shù)為m。這些傳感器構成基本集合為S={1,2,…,Ms},將集合S的子集全體(除去空集)記為擴展集合D,并記第r個子集為Dr,Dr中所包含的傳感器數(shù)目為Mr,則集合D的每一個元素Dr描述了一種可能的傳感器組合,所有傳感器組合的數(shù)目為2Ms-1。假設在探測區(qū)域內,目標的數(shù)目為N,當傳感器組合Dr分配給目標n時獲得的信息增量為IDin。
建立如下線性規(guī)劃模型
(8)
約束條件:
1)傳感器分配約束
(9)
2)每個目標的最大被跟蹤容量約束
(10)
3)每部傳感器最大跟蹤能力約束
(11)
其中,G為系統(tǒng)總體信息增量和;Ds為傳感器組合總數(shù)。
式(10)給出了每個目標被跟蹤容量約束,式(11)給出了每只傳感器最大跟蹤能力約束,從而確保被跟蹤的目標數(shù)量不超過傳感器的最大跟蹤能力[6]。
2.2 算法實現(xiàn)步驟
多被動傳感器協(xié)同目標跟蹤算法步驟如下:
1)將所有的被動傳感器進行分組;
2)每個傳感器組合利用UPF獲得目標狀態(tài)的先驗概率密度、后驗概率密度函數(shù);
3)對于每個傳感器組合計算跟蹤不同目標時獲得的Fisher信息增量;
4)建立線性規(guī)劃模型對傳感器資源進行分配,求出滿足約束條件時系統(tǒng)總體的信息增量和最優(yōu)分配方案;
5)輸出最優(yōu)分配方案進行濾波跟蹤。
3 仿真實驗分析
3.1 仿真場景設置
本文所提的算法與無跡粒子濾波與協(xié)方差矩陣相結合的方法進行了比較分析。設觀測區(qū)域x為[0,100]m,y為[0,100]m內隨機分布10只被動傳感器,各傳感器的測角誤差標準差σ相同,且均為1 mrad,系統(tǒng)采樣周期T=1 s,每只傳感器最大跟蹤目標數(shù)為2。3個目標在觀測區(qū)域內做勻速直線運動,運行時間為30 s,目標運動模型采用CV模型,粒子數(shù)為200,蒙特—卡羅次數(shù)為50次。當目標進行運動時,F(xiàn)isher信息距離的求解作為目標跟蹤的一部分融入整個跟蹤濾波遞推過程。圖1給出了仿真實驗的態(tài)勢圖,其中包括3個目標的運動軌跡和被動傳感器系統(tǒng)中10只隨機分布的傳感器位置。
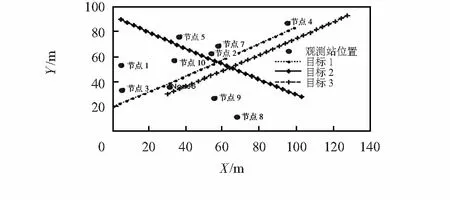
圖1 目標與傳感器分布態(tài)勢圖
3.2 實驗結果與分析
圖2和圖3給出了1次蒙特—卡羅仿真各目標相應的傳感器選擇結果。從仿真結果來看,由于各被動傳感器測角誤差相同,所以,傳感器的選擇一定程度上取決于目標與傳感器的距離。
圖4為50次蒙特—卡羅實驗的均方根誤差曲線圖。從結果可以看出:在跟蹤區(qū)域內,采用本文方法獲得的3個目標的位置誤差均優(yōu)于無跡粒子濾波與協(xié)方差矩陣相結合的方法。這是因為與本文提出的方法相比,在非線性非高斯環(huán)境下,協(xié)方差矩陣表征的只是后驗概率密度函數(shù)的一個特征值,用其來衡量跟蹤精度是不準確的,從而做出的跟蹤傳感器選擇方案亦不是最優(yōu)的。而本文的方法是利用大量粒子來近似先驗概率密度函數(shù)和、后驗概率密度函數(shù),比較的是概率密度函數(shù)的近似程度,因此,F(xiàn)isher信息距離包含了更多的信息,可以較為準確地描述傳感器對目標跟蹤的貢獻,從而可以在合適時間選擇恰當?shù)膫鞲衅鲗δ繕诉M行精確協(xié)同跟蹤,避免傳感器資源的浪費。因此,本文所給出的算法可以動態(tài)地選擇跟蹤性能較好的傳感器進行跟蹤,從而實現(xiàn)傳感器協(xié)同跟蹤,顯著提高系統(tǒng)的整體跟蹤性能。
3.3 算法時間復雜度分析
表1列出了10只傳感器3個目標50次蒙特—卡羅仿真實驗算法復雜度對比情況,包括算法的平均運行時間和相對計算強度(將協(xié)方差矩陣法計算強度設為1,相對計算強度無量綱)。由表1可看出:所提算法運算時間有了明顯地增加,額外的計算量主要用于計算先驗概率密度函數(shù)和后驗概率密度函數(shù)之間的Fisher信息距離。
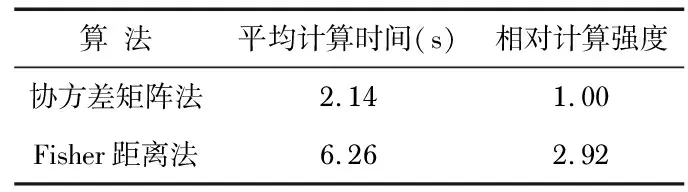
表1 算法計算復雜度
綜合上述實驗結果,本文所提算法可以自適應地選擇跟蹤性能較好的傳感器進行協(xié)同跟蹤,顯著地提高了跟蹤精度,但同時也增加了一定的計算復雜度。
4 結 論
本文針對多被動傳感器協(xié)同跟蹤問題進行了研究,依據(jù)信息幾何理論,以流形中的Fisher信息距離來衡量先驗概率密度函數(shù)和后驗概率密度函數(shù)之間的距離,繼而以此距離為依據(jù)動態(tài)選擇傳感器進行目標跟蹤。與傳統(tǒng)的協(xié)同跟蹤算法相比,能夠更加充分地體現(xiàn)出信息熵的變化。仿真實驗驗證了算法的可行性、優(yōu)越性和動態(tài)環(huán)境中的自適應性。
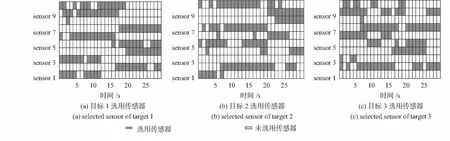
圖2 本文算法傳感器選擇情況
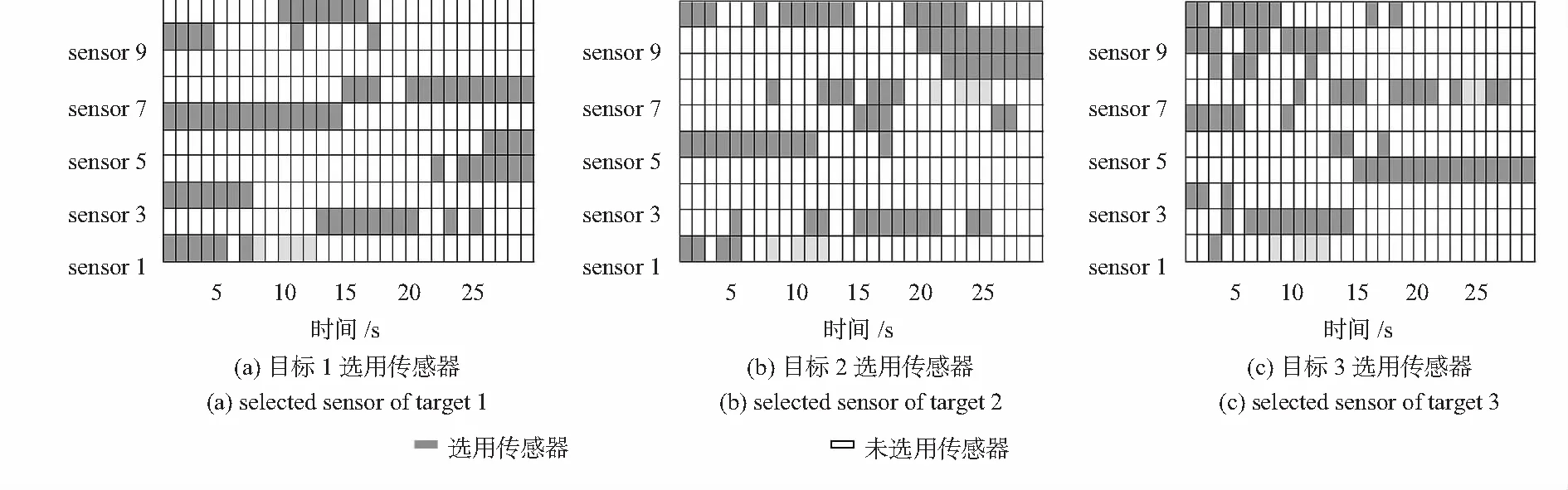
圖3 協(xié)方差法傳感器選擇情況
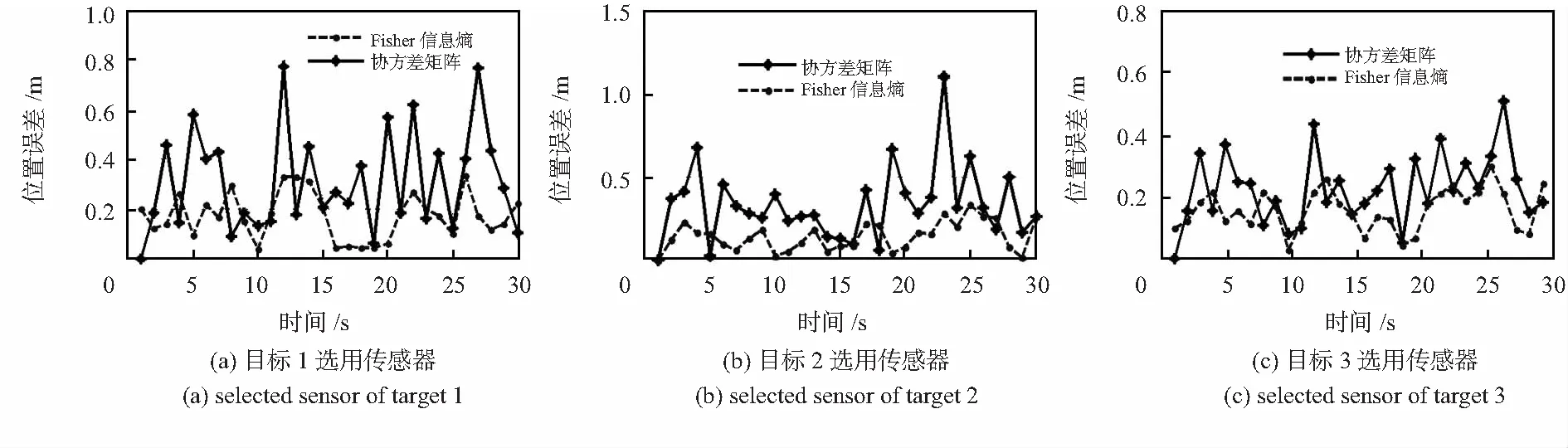
圖4 目標跟蹤位置誤差
參考文獻:
[1] 羅開平,姜 維,李一軍.傳感器管理評述[J].電子學報,2010,38(8):1901-1907.
[2] Hintz K J,Mcvey E S.Multi-process constrained estimation[J].IEEE Trans on Systems,Man and Cybernetics,1991,21(1):434-442.
[3] Kreucher C M,Hero A O,Kastella K D,et al.An information-based approach to sensor management in large dynamic network-s[C]∥Proc of the IEEE,2007,95(5):976-999.
[4] Yang Chun,Kadar Ivan,Blasch Erik.Comparison of information Theoretic divergences for sensor management[C]∥Proc of the SPIE Signal Processing,Sensor Fusion and Target Recognition,2011,8050:1-9.
[5] 劉 欽,劉 錚.一種基于Rényi信息增量的機動目標協(xié)同跟蹤方法[J].控制與決策,2012,27(9):1437-1440.
[6] 李彬彬,馮新喜,王朝英,等.基于信息增量的多被動傳感器資源分配算法[J].系統(tǒng)工程與電子技術,2012,34(3):502-507.
[7] 張華睿,楊宏文,胡衛(wèi)東,等.基于Fisher信息距離的傳感器管理方法[J].系統(tǒng)工程與電子技術,2012,34(8):1587-1591.
[8] Lapuyade-Lahorgur J,Barbaresco F.Radar detection using siegel diatance between autoregressive processed,application to HF and X-band radar[C]∥Proc of IEEE Radar Conference,2008:1-6.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
