微小型自主式水下機器人系統設計及試驗
2014-09-18 06:28:30魏延輝田海寶杜振振劉鑫郭志軍趙大威
哈爾濱工程大學學報 2014年5期
魏延輝,田海寶,杜振振,劉鑫,郭志軍,趙大威
(1.哈爾濱工程大學 自動化學院,黑龍江 哈爾濱150001;2.空軍駐江西地區軍事代表室,江西 南昌 330024)
隨著各國對海洋開發的重視,對海洋設備勘察和開發的研究越來越多,而水下機器人是海洋開發的重要載體,是研究的重點之一[1-3]。
智能水下機器人需適應復雜的海洋環境,其載體不僅要具有耐壓、水密和承受負載的能力,而且要具有低阻力、高推進效率和實現空間運動的能力。另外,在十分有限的空間,需配置不同性能的多種傳感器以滿足環境探測、目標識別、自主航行和自主完成任務的需要[4]。因此水下機器人的總體技術是水下機器人關鍵技術之一。目前自主式的水下機器人多以細長流線型外形、欠驅動方式為主,這種方式的機器人具有阻力小、成本低、重量小、系統可靠性高等特點[5],國外此類水下機器人較為著名,如REMUS-100,它是由美國Hydroid公司開發的一款被公認為是當今知名度最高也是最成功的微小型水下機器人[6],還有Bluefin Robotics公司的Bluefin-9[7]、美國Nekton公司研制開發的微小型水下機器人“巡邏兵(Renger)”[8-9]也都代表著當前水下機器人的先進水平。
本文所設計的微小型自主式水下機器人采用主推進器、雙側推進器、雙垂推進器的組合方式,建立系統控制模型,進行系統控制試驗有效性驗證。
1 水下機器人系統
1.1 水下機器人總體設計
微小型自主式水下機器人設計要求結構布置緊湊,合理利用水下機器人的各部分空間,以保證各種設備便于操作,又避免相互干擾和影響,以最大程度的發揮各種裝置和儀器的技術性能。此外,留有一部分備用空間,以便今后改裝和臨時增加設備儀器。本文所設計的水下機器人如圖1所示,機器人系統中主要器件如表1所示。
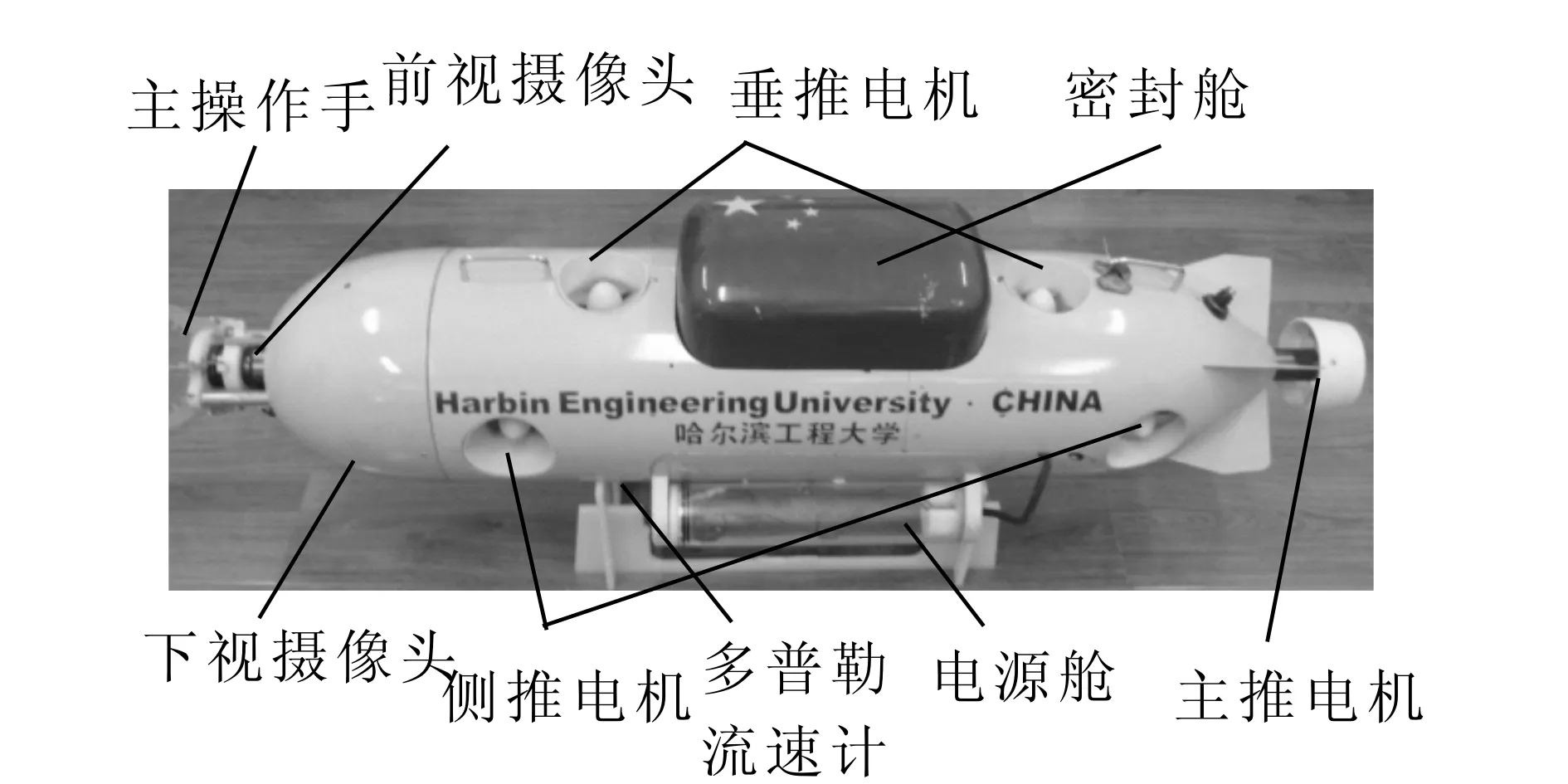
圖1 微小型自主式水下機器人
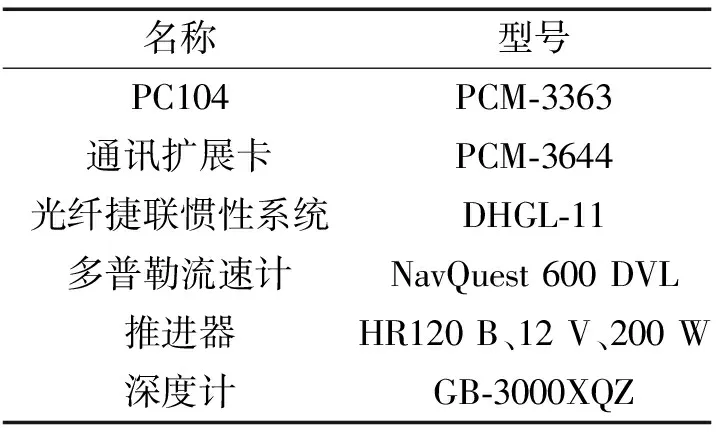
表1 微小型自主式水下機器人主要器件列表
機器人外殼體采用碳纖維,增加殼體的強度,減少了殼體的重量;電氣系統集中在密封艙內,減輕系統防水任務,也便于拆卸維修;系統內輔以剛性骨架,骨架設有浮力材料的安裝位置,方便進行浮力配比;系統水中整體設計為零浮力狀態,且系統空氣中重心在系統重心偏下,保證系統穩定性;系統對外的電氣接頭采用防水接頭。
1.2 水下機器人形體設計
根據水下機器人的使用場合和技術要求,其外形尺寸、結構形式會各種各樣,但是進行形體的設計時,總體需要考慮的原則:阻力小、航行性能好,足夠的強度,便于總體布置,良好的工藝性。
為了減小所設計的水下機器人行進阻力,減少動力消耗,將外表做成流線型,如魚雷形或球形。自主式水下機器人需要系統自帶電源,為了增加水下操作時間,減少動力消耗,除了在控制方面合理進行分配動力,還應該減少行進阻力,對形體進行優化,為此在殼體兩側的側下方分別安裝電源艙。
1.3 推進器的布置
水下機器人的推進器數量取決于要求實現的自由度的個數,一般來講應大于或者等于自由度個數。所設計的水下機器人以平移運動為主,能快速準確地到達指定點目標坐標位置,在3個姿態角中,航向角決定水下機器人的前進方向,是水下機器人姿態角中最重要的;俯仰角決定水下機器人的上升和下降運動;為了保證水下機器人正常作業,通常將系統的重心設計到系統中心線偏下的位置,抑制其橫滾運動的產生。綜合以上因素,所設計的水下機器人采用單個主推進器、2個垂推推進器和2個側推推進器組合的方式,增加系統的運動靈活性和自主控制能力。
推進器的布局按照下面2個原則[10]進行:
1)應盡可能的使三軸的合力交匯于一點,而且這點應盡可能的接近機器人的重心,防止有害的附加運動給系統帶來控制上的麻煩。
2)平移運動時,理論上推進器的布置與機體坐標系保持平行,能夠取得最大的推進效率,但是水下機器人空間有限,設備布置比較密集,所以推進器的入流會受到遮擋的影響,使推進器的效率降低。為了改善這種情況,將推進器的軸線與坐標軸線之間留一個小的角度,這個角度可取5°~10°,而cos 5°~cos 10°仍接近于1,故而推力不會損失太大,不僅改善了入流情況,還會提高推進器的效率。
1.4 控制系統
水下機器人的控制系統采用集中控制方式,中心控制器為高性能的PC104,通過通訊擴展卡與分系統進行數據提取和任務控制,完成系統電源檢測、圖像采集、全局路徑軌跡規劃、視覺導航、姿態控制等任務。控制系統組成框圖如圖2所示。
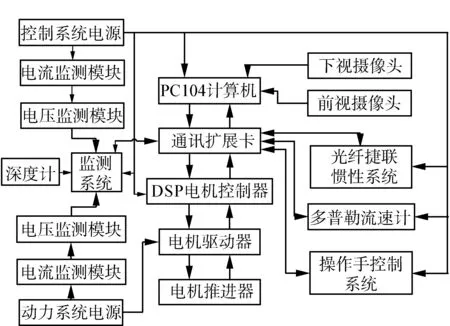
圖2 控制系統組成框圖
1.5 推進器控制驅動系統
如圖3所示,推進器的控制系統以DSP為核心,完成對各種信號的處理以及系統控制,通過串行通訊接口與PC104進行通訊,獲得深度、姿態及速度信息,同時上傳各推進器的速度信息。為了使推進器更加有效進行控制,每個驅動器都以飛思卡爾單片機為核心組成速度閉環控制系統。DSP以PWM方波形式向各驅動器發送推進器速度控制命令,飛思卡爾單片機通過捕獲的方式獲得命令后,發送PWM方波到MOS管組成驅動模塊上控制推進器進行運動,同時檢測推進器的三相電流變化測量推進器的運行速度,實現推進器的速度閉環控制。
1.6 速度及深度檢測系統
水下機器人采用多普勒計程儀作為系統速度檢測模塊。利用發射的聲波和接收的水底反射波之間的多普勒頻移測量水下機器人相對于水底的航速和累計航程。這種計程儀準確性好,靈敏度高,可測縱向和橫向速度,但價格昂貴。主要用于巨型船舶在狹水道航行、進出港、靠離碼頭時提供船舶縱向和橫向運動的精確數據。多普勒計程儀受作用深度限制,超過數百米時,只能利用水層中的水團質點作反射層,變成對水計程儀。
2 基于DSP控制器的控制回路設計
2.1 深度控制回路的PID控制
水下機器人的定深系統是通過深度計反饋的電壓信號經過A/D轉換變成深度信號,通過調整垂直方向的推進器,使深度達到預定的狀態,其控制回路框圖如圖4所示。
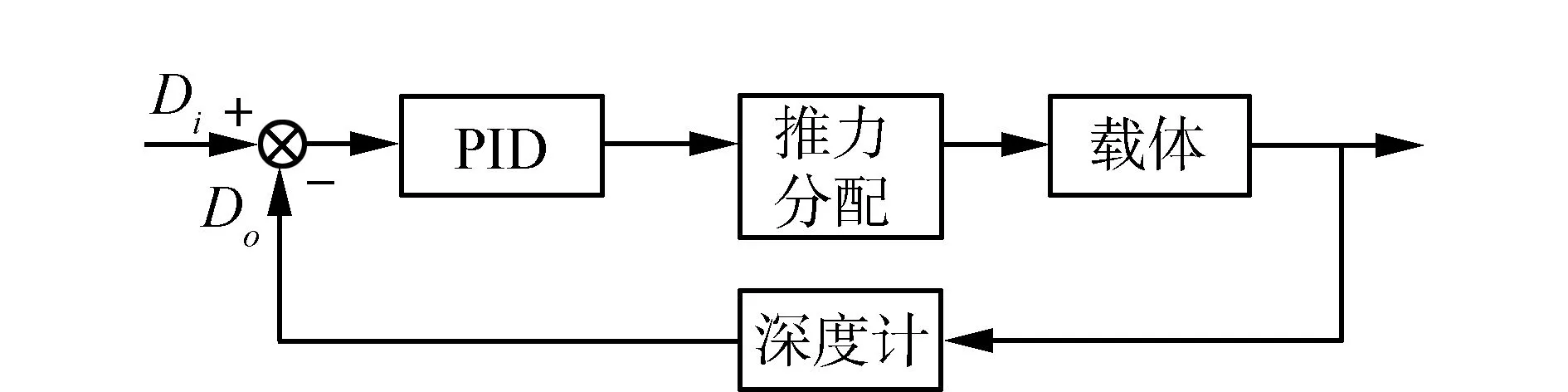
圖4 定深控制回路
圖中:Di為深度輸入,Do為深度輸出,典型的PID調節器作為系統定深的控制器,根據上圖可得到:
(1)
式中:KP、Ki和Kd是PID調節器系數。為了保證響應速度快和精度準,可以根據當前誤差信號的大小改變比例系數、積分系數和微分系數:
(2)
(3)
(4)
其中誤差信號數值是根據實際所用的深度測量傳感器的精度所決定的,以試驗所得數據為準,在誤差信號大于0.5 m時,將積分環節的積分系數變為零,增大比例系數,將微分系數也置為零,這樣可以提高系統的快速性;在誤差信號小于0.5 m時,加上積分環節,減小比例系數,將微分系數去除一個合適的正數(通過試驗進行驗證選取),提高系統精度。
2.2 速度控制回路的PID控制
水下機器人的速度檢測裝置是通過脈沖計數的原理,根據計數時間計算出當前的速度,為了使其達到一個給定的速度運動狀態,本文設計的速度控制回路也采用傳統的PID調節器作為閉環系統的控制裝置。其速度控制方框圖如圖5所示。
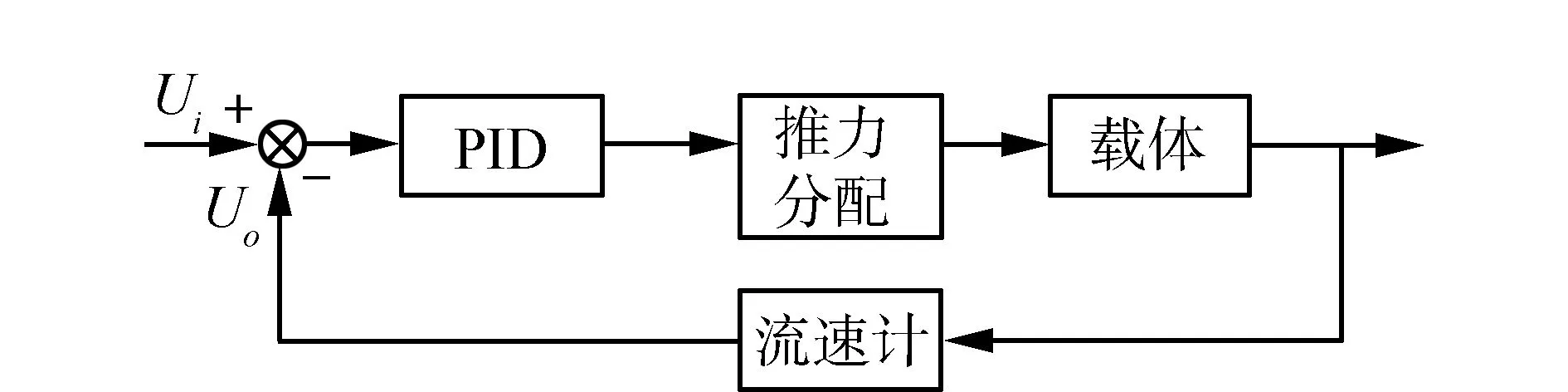
圖5 速度控制回路
圖中:Ui為速度輸入,Uo為速度輸出,本文采用典型的PID調節器作為系統定深的控制器,可得:
(5)
為了保證響應速度快和精度準,可以根據當前誤差信號的大小改變比例系數、積分系數和微分系數:
(6)
(7)
(8)
其中誤差信號的確定是根據實際所用的速度測量傳感器精度所決定的,但是要以實際的試驗所得數據為準,因此在誤差信號大于0.2 m/s的時候,將積分環節的積分系數變為零,增大比例系數,將微分系數也置為零,這樣可以提高系統的快速性。在誤差信號小于0.2 m/s時候,加上積分環節,減小比例系數,將微分系數去除一個合適的正數(通過試驗進行驗證選取),提高系統的精度。
2.3 定位控制回路的PID控制
定位控制能使水下機器人準確進入某個平面位置并保持在該位置,水下機器人的定位控制是通過捷聯慣性導航系統輸出的位置信息和上位機下達的目標信息相互比較,將兩個位置誤差(xe,ye,ze)作為控制器的輸入值,通過控制器控制升降推進器、舵機和主推進器減少其誤差值,直到為零,其定位控制回路框圖如圖6所示。
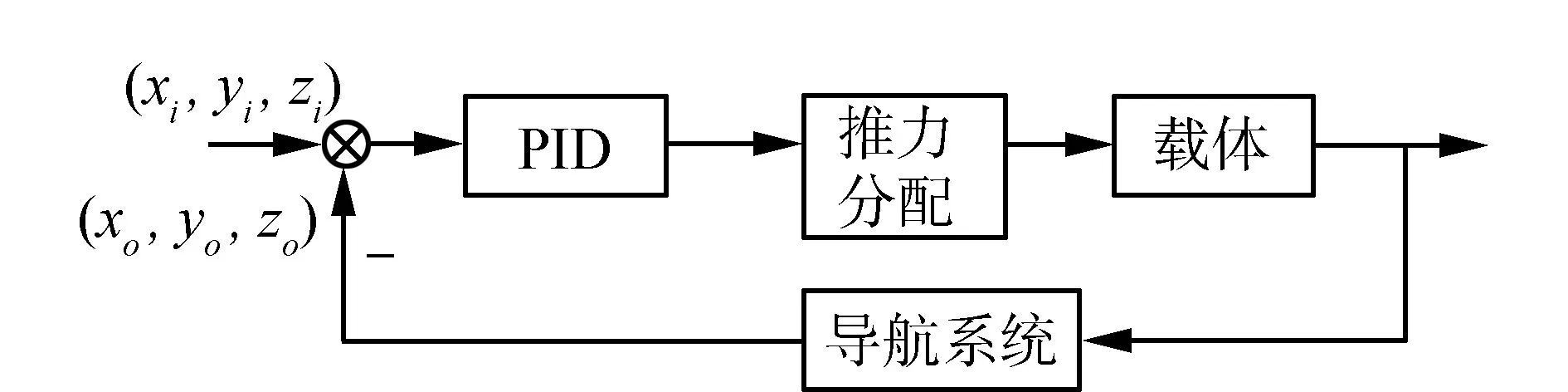
圖6 定位控制回路
圖6中的(xo,yo,zo)為導航系統輸出的實際值,(xi,yi,zi)為控制系統的給定值,本文采用典型的PID調節器進行定位控制,根據上圖可得到如下控制規律:
(9)
式中:Xc、Yc、Zc為PID控制器的輸出和被控對象的輸入,KP1、KP2、KP3為3個坐標軸調節器的比例系數,Ki1、Ki2、Ki3為3個坐標軸調節器的積分系數,Kd1、Kd2、Kd3為3個坐標軸調節器的微分系數。在控制過程中,3個坐標軸是獨立的分量,在進行定位時,推力分配也同樣單獨進行的,其系數調節控制規律如下(以X軸為例):
(10)
(11)
(12)
其中誤差信號值是根據實際所用的捷聯慣導系統的精度所決定,但是要以實際的試驗所得數據為準,因此在誤差信號大于0.2 m/s的時候,將積分環節的積分系數變為零,增大比例系數,將微分系數也置為零,這樣可以提高系統的快速性。在誤差信號小于0.2 m/s時候,加上積分環節,減小比例系數,將微分系數去除一個合適的正數(通過試驗進行驗證選取),提高系統的精度。
3 運動控制試驗
水下機器人的航行性能是實現系統其他運動功能的保證,所以航行性能試驗在水下機器人試驗中占居重要地位,也是檢驗運動控制系統設計合理性的重要依據。
為了檢驗水下機器人在航行中運動控制系統的性能,做了大量的航行試驗,試驗環境如圖7所示。進行水下試驗的環境為:水聲聲道水池,長20 m,寬4 m,水深2 m,水池內水域情況良好,滿足試驗條件。

圖7 水下機器水池中航行
3.1 水平面航行試驗
將水下機器人放置到水池中,使其能夠在水中保持漂浮狀態,然后通過上位機傳送控制命令,使推進器在一定轉速下工作,通過控制不同位置的推進器完成水下機器人直線航行、側推航行和轉彎試驗。
3.1.1 直線航行試驗
水下機器人在水池中處于漂浮狀態時,控制主推進器工作,使它保持一定轉速推動水下機器人能夠在水中做直線運動。
試驗中通過PC機記錄試驗過程中水下機器人的航速、位置信息和深度信息,通過與設定的直線航跡對比如圖8所示。
通過試驗數據可以看出,采用單推進器進行直線航行,運動誤差達到1.38 m,運動誤差較大,原因在于水下機器人外殼體設計加工的偏差產生阻力不均,以及水下擾動影響,會使航行偏差較大,為此需要進行側向推進器進行輔助,才能滿足直線航行運動要求。
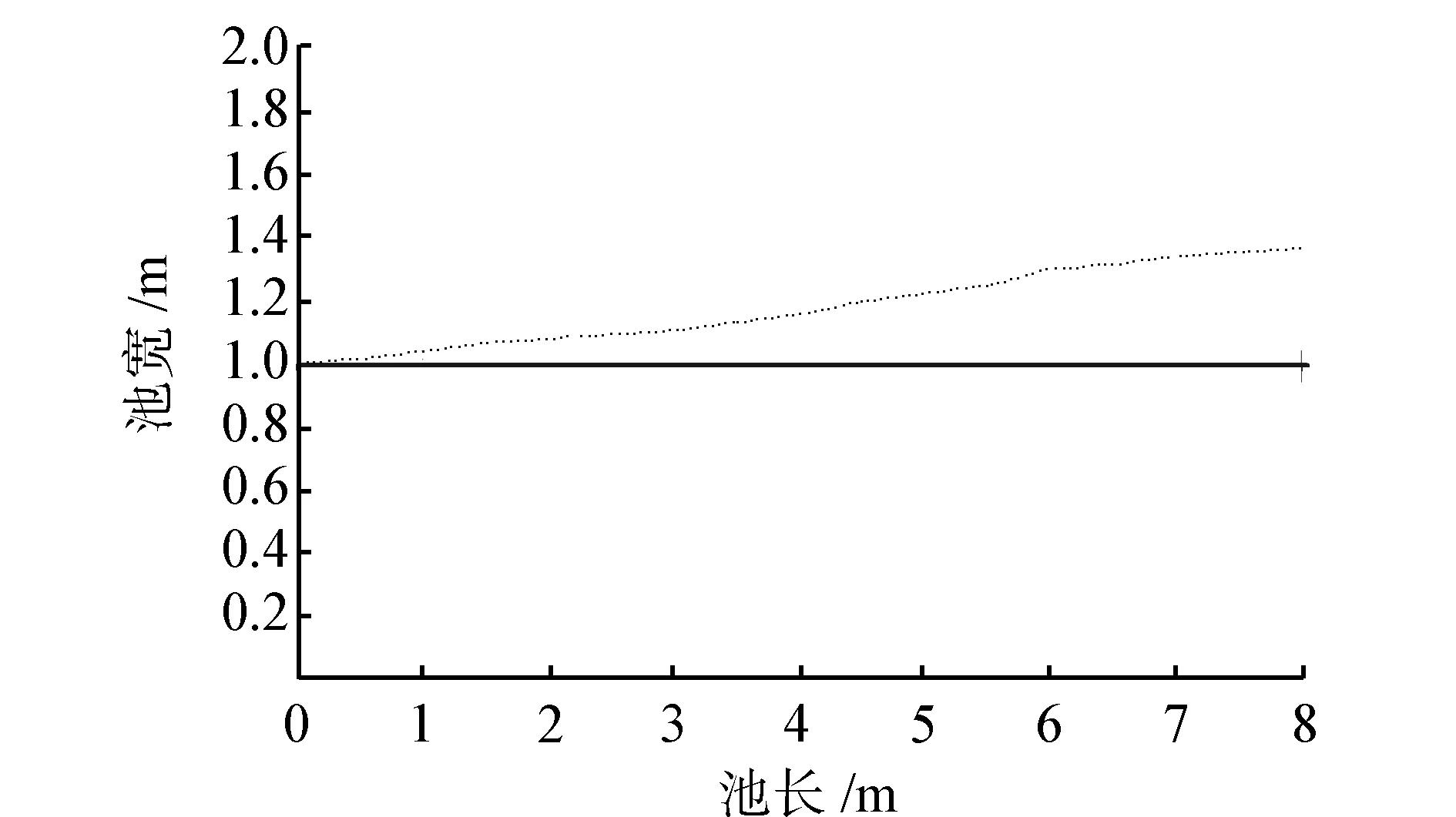
圖8 直線航行時軌跡比較
3.1.2 側移航行試驗
試驗中,通過PC機記錄了運動的位置、速度和深度信息,與所設定的側移運動航跡相比較的軌跡圖如圖9所示。圖中最大運動誤差在0.2 m內,采用雙推進器能夠完成側移運動,保證運動控制精度。
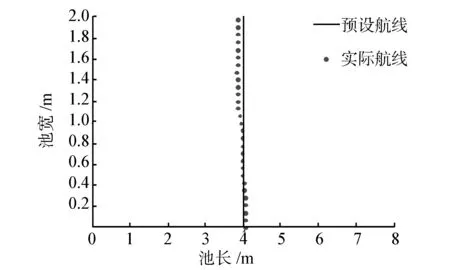
圖9 水下機器人側移時航線
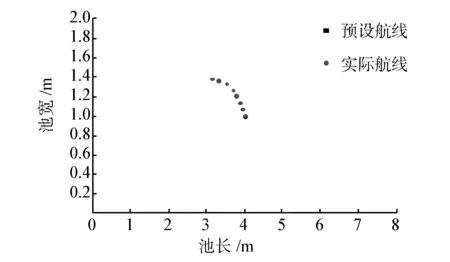
圖10 水下機器人轉向航線
水下機器人在水池中保持漂浮狀態,通過PC機發送命令,使側面的2個推進器同步工作,但是要轉向相反,就可達到轉向航行的功能。并且這樣轉向大大縮小了轉彎半徑。轉向航行試驗中,PC機通過記錄位置,速度和深度信息,與所設定的航行軌跡相比較的圖10。
從圖中控制軌跡線可以看出,實際轉向軌跡和預定軌跡吻合,滿足控制精度要求。
3.2 垂直面航行試驗
將水下機器人放置到水池中,使其保持漂浮狀態,通過PC機發送指令控制升降推進器工作,當水下機器人下降到一定深度,升降推進器停止工作,使其保持在一定的深度位置。
通過試驗記錄的深度計數據和航向數據,與所設定的軌跡相比較結果如圖11所示。
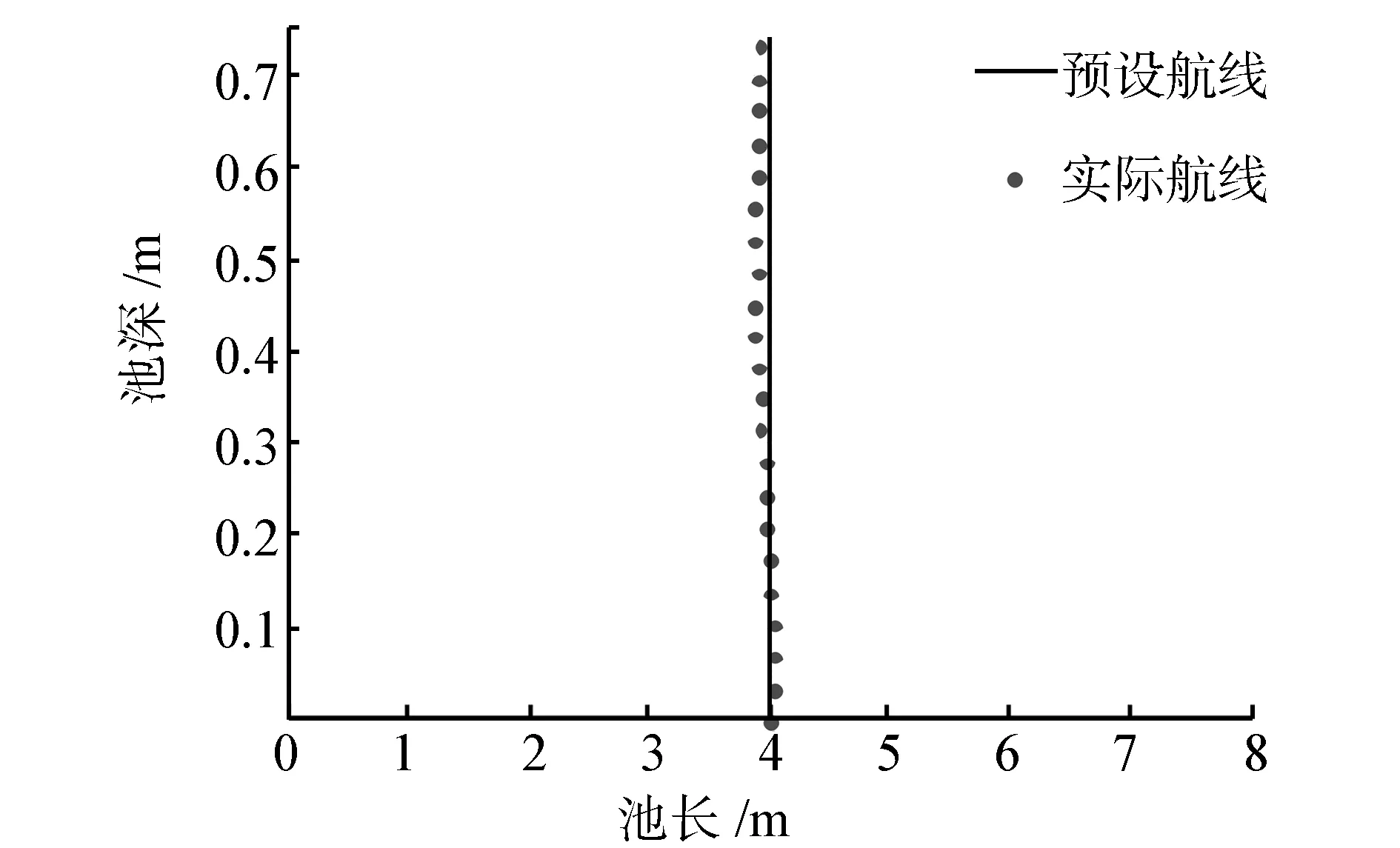
(a)縱深航線
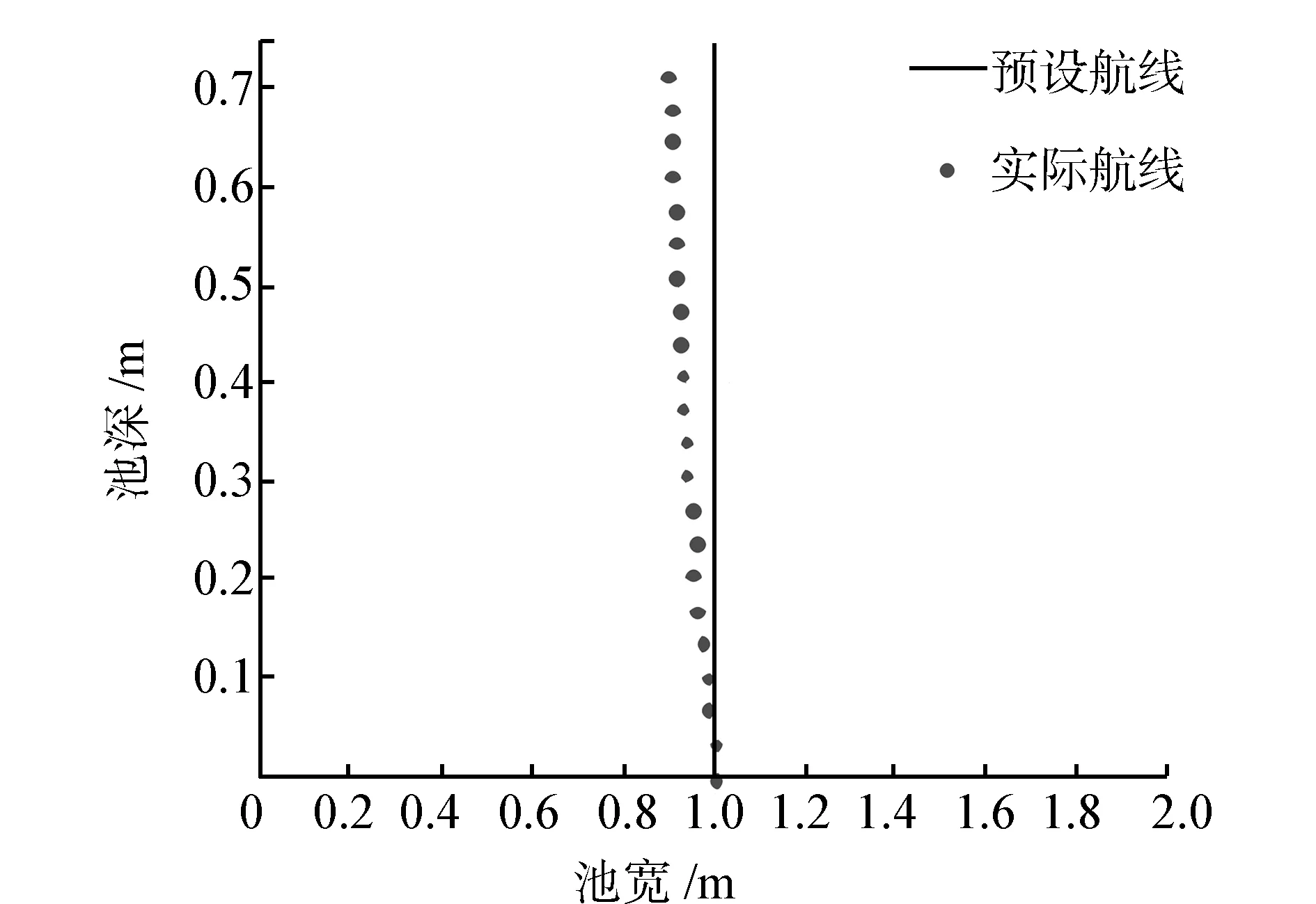
(b)側深航線
從圖中的試驗結果可以看出,運動控制精度在0.1 m左右,滿足實際控制要求。
4 結論
1) 研制的微小型自主式水下機器人采用單個主推進器、雙側推進器、雙垂推進器的組合方式,來完成海洋環境的適應和自主運動的實現。
2) 將復雜多輸入多輸出控制系統分解成3個
分控制系統:深度控制回路、速度控制回路、定位控制回路,減少控制系統的耦合程度,降低控制算法的難度。
3) 通過水下運動控制試驗結果表明:采用3個分控制系統能夠在側向移動、轉向、升降運動保持控制精度,在直線航行運動誤差較大,需其他推進器進行輔助可滿足運動控制精度要求。
參考文獻:
[1]劉芙蓉,陳輝.自主式水下潛器研究開發綜述[J]. 艦船科學技術, 2008,30(5):20-23.
LIU Furong, CHEN Hui. A review of the development and research of autonomous underwater vehicles[J]. Ship Science and Technology, 2008,30(5):20-23.
[2]徐玉如,李彭超.水下機器人發展趨勢[J].自然雜志,2011,33(3):125-132.
XU Yuru, LI Pengchao. Trend in the develoment of underwater vehicles[J].Chinese Journal of Nature,2011,33(3):125-132.
[3]徐建安,王玉甲,張銘鈞. 自主式水下機器人試驗平臺研制與實驗研究[J]. 哈爾濱工程大學學報, 2007,28(2):212-217.
XU Jian'an,WANG Yujia, ZHANG Mingjun. Development and experiment of an autonomous underwater vehicle test-bed[J]. Journal of Harbin Engineering University,2007,28(2):212-217.
[4]徐玉如,龐永杰,甘永,等.智能水下機器人技術展望[J]. 智能系統學報,2006,1(1):9-16.
XU Yuru, PANG Yongjie, GAN Yong, et al. AUV state of the art and propect[J]. CAAI Transactions on Intelligent Systems,2006,1(1):9-16.
[5]王芳,萬磊,李曄,等.欠驅動AUV的運動控制技術綜述[J].中國造船,2010,51(2):227-237.
WANG Fang, WAN Lei, LI Ye,et al.Under technical review AUV driver control movement. Shipbuilding of China. 2010,51(2):227-237.
[6]YUH J, NIE Jing. Applieation of non-repressor-based adaptive control to underwater robots[J]. Computer and Electrical Engineering, 2000,26:169-179.
[7]Bruce Powel Douglass. Real-time UML[R]. Boston:Addison Wesley,2004.
[8]李開生,張慧慧,費仁元,等.機器人控制其體系結構研究的現狀和發展[J].機器人,2000,22(3):235-240.
LI Kaisheng, ZHANG Huihui, FEI Renyuan,et al. Present situation and development of the research on the architecture of robot control[J]. Robot,2000,22(3):235-240.
[9]MILLER D J, LENNOX R C. An object-oriented environment for robotsystem architecture[J]. IEEE Control System,1991 ,11(2):14-23.
[10]蔣新松,封錫盛.水下機器人[M].沈陽:遼寧科學技術出版社,2000:277-278.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
