混凝土泵車臂架精準(zhǔn)控制系統(tǒng)的研究
2014-09-17 12:11:16黃罡周余明康小東
機(jī)床與液壓 2014年7期
關(guān)鍵詞:系統(tǒng)
黃罡,周余明,康小東
(三一智能控制設(shè)備有限公司,湖南長沙410100)
現(xiàn)用的混凝土泵車臂架普遍采用開環(huán)控制模式,人們對于臂架的操作控制全憑目測和手感。由于沒有臂架的運(yùn)動速度和位移信息反饋,在使用過程中存在臂架速度控制特性不好的問題,具體表現(xiàn)為當(dāng)給定量控制量較小時,臂架不動作,當(dāng)給定量大時,臂架運(yùn)動劇烈,給操作帶來不便。
隨著智能化技術(shù)的發(fā)展和應(yīng)用,泵送智能化趨勢日趨明顯[1]。在智能化泵送的應(yīng)用中,控制程序直接控制臂架布料,可以大大減少工人勞動強(qiáng)度,提高澆筑質(zhì)量。傳統(tǒng)的開環(huán)控制模式已經(jīng)無法滿足要求,控制器必須實(shí)時檢測臂架的運(yùn)動信息和姿態(tài)情況,對臂架的運(yùn)動進(jìn)行閉環(huán)控制。
檢測臂架姿態(tài)可以通過在臂架之間安裝旋轉(zhuǎn)編碼器或在臂架上安裝傾角傳感器來實(shí)現(xiàn),這兩種方式直接對臂架姿態(tài)進(jìn)行檢測,沒有臂架油缸的位置反饋,不利于油缸的位置控制。此外旋轉(zhuǎn)編碼器存在安裝和抗干擾能力差等問題,不便于推廣應(yīng)用。
鑒于以上情況,提出通過檢測臂架油缸位移來計(jì)算臂架姿態(tài)和末端位置的方案,可以實(shí)現(xiàn)對油缸的閉環(huán)控制。內(nèi)置式的位移傳感器檢測精度高,穩(wěn)定性好。
1 系統(tǒng)組成及實(shí)現(xiàn)
1.1 臂架控制系統(tǒng)
系統(tǒng)采用半閉環(huán)控制模式,通過位移傳感器測量油缸的位移,根據(jù)臂架間連桿的幾何關(guān)系間接地求出臂架末端的位置。控制器根據(jù)當(dāng)前接收的操作指令,輸出PWM信號,控制多路閥開度,液壓缸隨即動作,驅(qū)動臂架運(yùn)動。安裝在液壓缸內(nèi)的位移傳感器向控制器反饋當(dāng)前油缸的位移,控制器再根據(jù)實(shí)際值與給定值之間的偏差情況,進(jìn)行實(shí)時調(diào)整,實(shí)現(xiàn)對油缸的精確控制。
該臂架系統(tǒng)開發(fā)了一套數(shù)字式臂架油缸。采用磁致伸縮位移傳感器實(shí)時檢測油缸的位移,并由此計(jì)算出油缸速度,傳感器安裝于液壓缸內(nèi)部,使得整個系統(tǒng)結(jié)構(gòu)緊湊,抗干擾能力強(qiáng)。位移傳感器采用同步串口 (SSI)通訊方式,在50 m范圍內(nèi),傳輸速率可達(dá)400 kbps,滿足實(shí)時性要求。檢測精度達(dá)到4 μm,線性誤差小于等于0.05FS,重復(fù)誤差小于等于0.01FS。滿足檢測所需精度要求。

圖1 系統(tǒng)結(jié)構(gòu)圖
1.2 臂架末端位置
下面以三一重工某四節(jié)臂泵車為例進(jìn)行論述,其結(jié)構(gòu)簡圖如圖2所示。整個臂架系統(tǒng)包括:臂架、油缸、連桿、輸送管道和軟管。各臂架采用油缸和連桿機(jī)構(gòu)連接。

圖2 臂架系統(tǒng)
為求解臂架末端位置與臂架之間的夾角關(guān)系,按照圖3所示對各節(jié)臂架設(shè)定坐標(biāo)系。
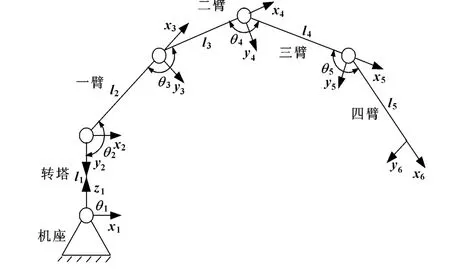
圖3 臂架系統(tǒng)坐標(biāo)系
在大地坐標(biāo)系中的位置可由式(1)—(3)確定[2]。
1.3 油缸長度與臂架夾角轉(zhuǎn)化
從機(jī)構(gòu)學(xué)的角度上看,轉(zhuǎn)塔、臂架、連接桿和液壓缸組成平面連桿系[3]。各構(gòu)件具有一個自由度,轉(zhuǎn)塔只圍繞豎直軸線轉(zhuǎn)動,各臂架只能繞其首端關(guān)節(jié)軸線轉(zhuǎn)動。
油缸、連桿和臂架間組成的完整的約束系統(tǒng),使得臂架具有確定的相對運(yùn)動。
通過油缸、臂架與連桿間的幾何關(guān)系,可由油缸的長度推導(dǎo)出臂架間的夾角。
如圖2所示,臂架的連接可分為3種類型:
Ⅰ型如1號臂架與轉(zhuǎn)塔之間的連接;Ⅱ型 如1號與2號臂架之間的連接,2號與3號臂架之間的連接;
Ⅲ型如3號與4號臂架之間的連接。
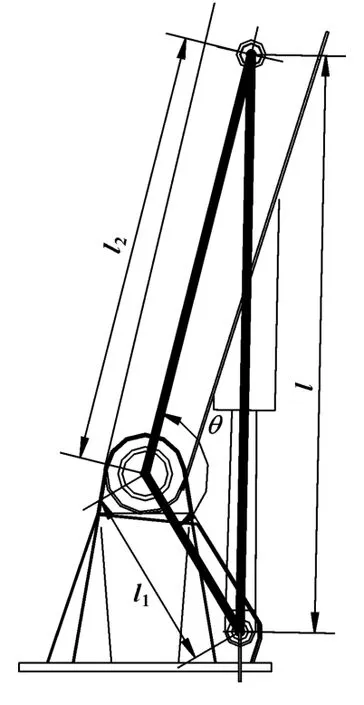
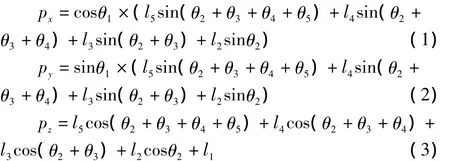
圖4 Ⅰ型聯(lián)接
圖5 Ⅱ型聯(lián)接
由圖4可得,1號臂架與轉(zhuǎn)塔之間夾角與油缸長度的關(guān)系為:

其中:l1、l2分別為轉(zhuǎn)塔、臂架結(jié)構(gòu)尺寸;
l為油缸長度。
1號與2號臂架之間夾角與油缸長度的換算過程為:
其中:l15為油缸的伸出長度;
∠234為臂架間夾角相關(guān)量。
實(shí)際夾角值θ=∠234-α,α為與兩臂架幾何尺寸相關(guān)的固定值;
按式(5)—(10)順序計(jì)算可求得1號臂架與2號臂架的夾角∠234,同理可求解2號臂架與3號臂架的夾角。
3號與4號臂架之間夾角與油缸長度的換算:

圖6 Ⅲ型連接
顯然,方程(11)—(17)并非簡易的顯式形式,無法得到解析解。可采用取適量特征點(diǎn)再曲線擬合和非線性方程組求解等數(shù)值方法進(jìn)行求解[4]。
求得中間量L35之后,可通過式(18)—(20)求得臂架夾角相關(guān)量∠234。
折疊狀態(tài)下,3、4號臂架夾角為 0°,此時油缸完全縮回,長度1 200 mm。臂架展開角度范圍 242°,油缸行程815 mm。圖7為通過弦截法求得的3、4號臂架夾角與油缸長度關(guān)系。
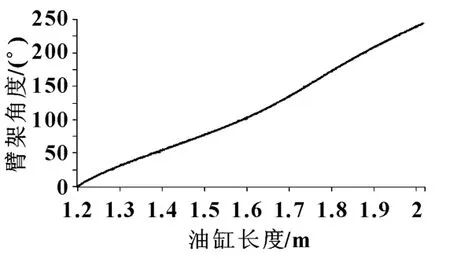
圖7 Ⅲ型聯(lián)接長度與角度關(guān)系
2 模型建立與仿真
2.1 系統(tǒng)模型
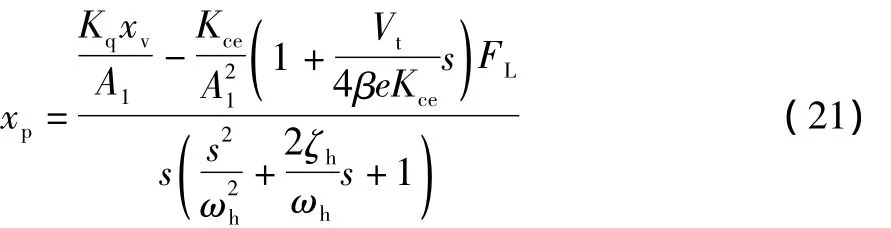
臂架系統(tǒng)中,液壓缸主要承受慣性負(fù)載,因此可以忽略彈性負(fù)載的影響。通過對液壓缸的流量方程、線性化的電液比例閥流量方程以及液壓缸負(fù)載平衡方程進(jìn)行拉氏變換可得液壓伸出位移xp與閥芯開度xv以及負(fù)載FL之間關(guān)系如下[5]:
一般情況下負(fù)載壓力對比例閥的流程影響較小,可以認(rèn)為比例閥的輸出流量全部由閥芯開度來控制,即有Qsv=qL=Kqxv。忽略負(fù)載干擾后,液壓缸的傳遞函數(shù)為:
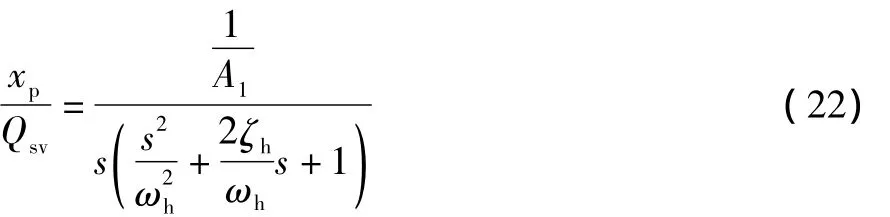
上式也即是工程中常用的液壓缸傳遞函數(shù)[6]。其中:
工程上一般將比例方向閥視為一個二階振蕩環(huán)節(jié),其傳遞函數(shù)為[6]:

其中:ωsv為比例閥的固有頻率;
δsv為比例閥的阻尼比;
Kq為比例閥流量增益。
2.2 基于前饋補(bǔ)償?shù)腜ID控制
泵車臂架系統(tǒng)屬于大負(fù)載、大慣性系統(tǒng),其動作一般會存在較大的延時,特別是從靜止啟動時,因此有必要提高系統(tǒng)的響應(yīng)特性和跟隨特性。文中采用帶前饋補(bǔ)償?shù)腜ID控制策略,前饋控制可以提高系統(tǒng)的跟蹤性能,常被用于高精度控制系統(tǒng)中[7]。
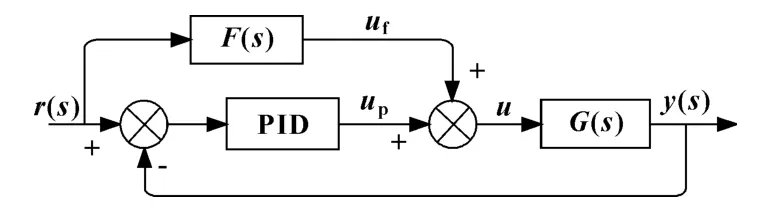
圖8 帶前饋補(bǔ)償控制器
根據(jù)前饋控制理論,有F(s)·G(s)=1。
2.3 模型建立與仿真
以1號臂架油缸為例,主要參數(shù)如表1所示。
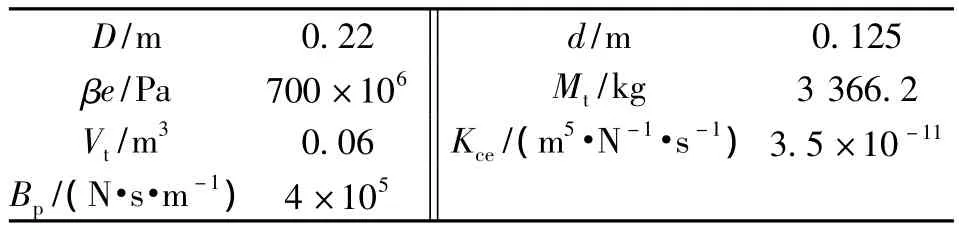
表1 1號油缸主要參數(shù)列表
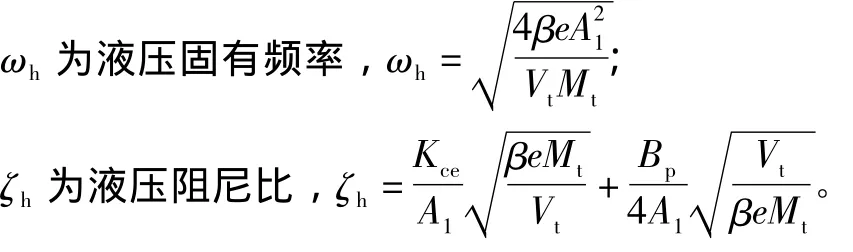
通過表1中參數(shù)可以求得ωh=141.44 rad/s;ζh=0.426;根據(jù)比例閥產(chǎn)品手冊可得ωsv=70 rad/s;δsv=0.5;Kq=1.93 ×10-3m3/s·A;根據(jù) 1 號油缸結(jié)構(gòu)A1=3.8×10-2m2。建立的系統(tǒng)模型框圖如圖9所示。

圖9 控制系統(tǒng)模型
為驗(yàn)證控制器的效果,在Matlab軟件中編寫M腳本對上述模型進(jìn)行仿真,對幅值為1.2 m,頻率為0.4 Hz的正弦信號進(jìn)行跟蹤。與普通PID控制對比如圖10所示,跟蹤誤差如圖11所示。
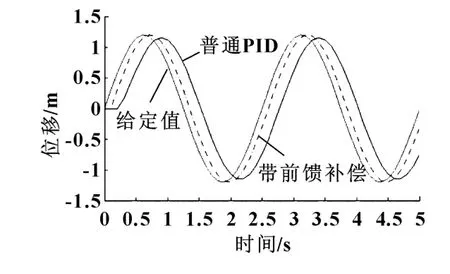
圖10 位移跟蹤曲線
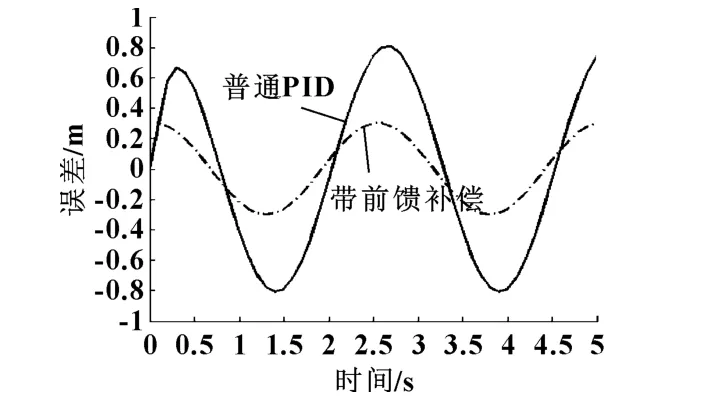
圖11 位移跟蹤誤差曲線
從圖11中可以看出,在相同的輸入情況下,帶前饋補(bǔ)償?shù)腜ID控制比普通的PID控制方式具有更好的跟蹤效果,相比實(shí)際應(yīng)用來說,仿真中給定的輸入值頻率偏高,在低頻率的輸入情況下,跟蹤效果更加理想。
3 實(shí)車驗(yàn)證
基于上述控制方式,編寫控制程序在四節(jié)臂泵車上進(jìn)行實(shí)車驗(yàn)證。控制器硬件采用三一自主研發(fā)的SYMC智能運(yùn)動控制器,控制信號輸出頻率為20 Hz,位移傳感器數(shù)據(jù)采集頻率為40 Hz。試驗(yàn)中考慮到長時間測試時的數(shù)據(jù)保存問題,對位移傳感器信號進(jìn)行抽取。
1號臂架油缸實(shí)車跟蹤位移、速度分別如圖12、13所示。
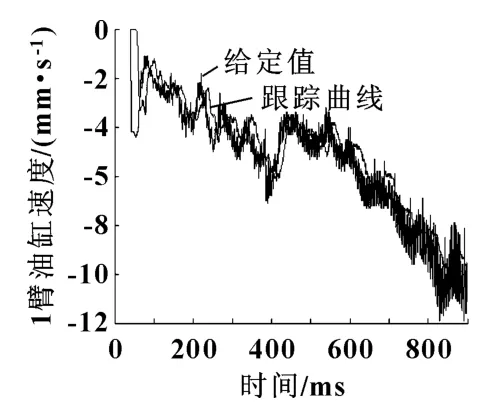
圖12 1號油缸速度跟蹤曲線
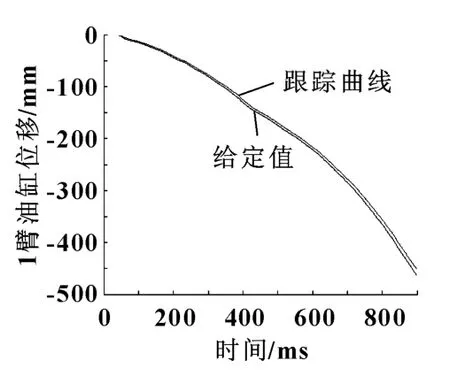
圖13 1號油缸位移跟蹤曲線
從圖中可以看出,位移和速度相對于給定值存在一定滯后。但是滯后不大,約為500 ms以內(nèi),操作過程中感覺不明顯,滿足技術(shù)指標(biāo)。
通過各油缸的速度和長度,將長度轉(zhuǎn)化為各節(jié)臂架的姿態(tài)角度,通過(1)—(3)計(jì)算出臂架末端位置。圖14和圖15分別為實(shí)驗(yàn)過程中,臂架末端高度跟蹤曲線、水平距離跟蹤曲線以及跟蹤誤差曲線。從曲線上可以看出,在5 m行程中,豎直方向跟蹤誤差保持在250 mm內(nèi),在20 m的水平行程中,跟蹤誤差保持在370 mm內(nèi)。滿足實(shí)際泵送作業(yè)的精度需求。
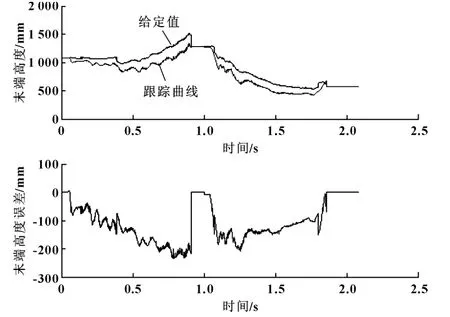
圖14 臂架末端高度跟蹤曲線與誤差
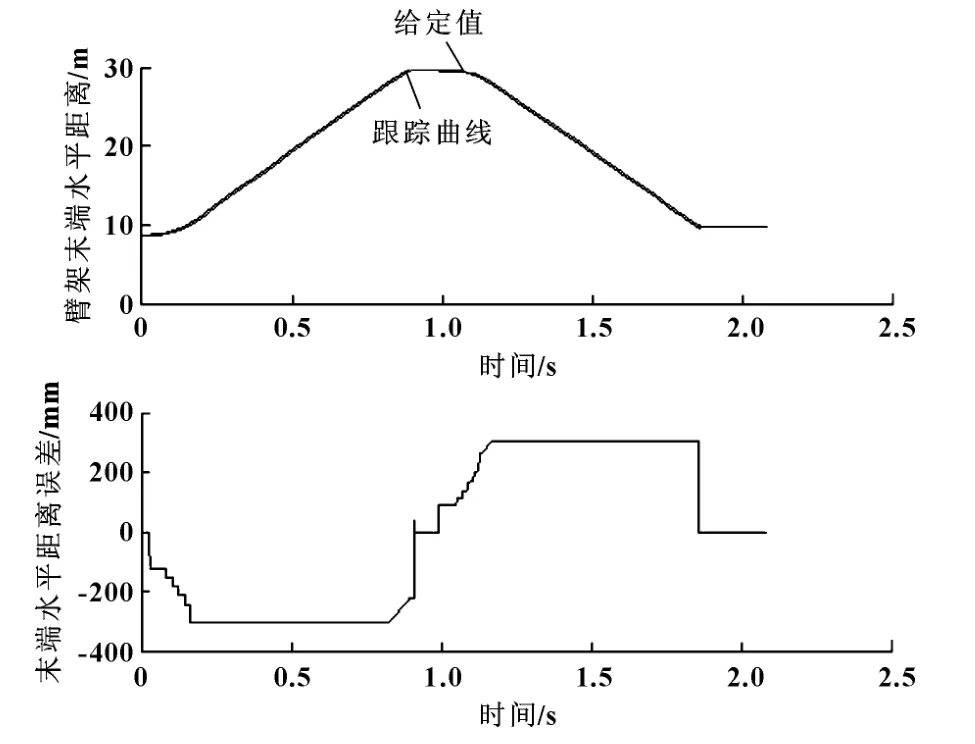
圖15 臂架末端水平距離跟蹤曲線與誤差
4 結(jié)論
通過實(shí)驗(yàn)證明采用位移傳感器檢測油缸位移,再轉(zhuǎn)化成臂架姿態(tài)角度的方式是切實(shí)可行的。采用帶前饋補(bǔ)償?shù)腜ID控制策略,可以有效提高系統(tǒng)的響應(yīng)特性和跟隨特性。實(shí)際應(yīng)用中,臂架機(jī)械本體的大慣性,以及液壓系統(tǒng)本身的響應(yīng)特性,給整個系統(tǒng)的響應(yīng)特性造成影響。此外,運(yùn)動過程中臂架的變形也是造成末端位置誤差的一大主要因素。因此,根據(jù)臂架姿態(tài)實(shí)時估算臂架的變形,并對變形進(jìn)行補(bǔ)償會明顯提高末端位置的控制精度。
【1】仇文寧.混凝土泵車布料桿的位置控制[M].吉林大學(xué),2004.
【2】KANG Xiaodong,HUANG Gang,CAO Xinli,et al.Trajectory Planning for Concrete Pump Truck based on Intelligent Hill Climbing and Genetic Algorithm[J].Applied Mechanics and Materials,2012,127:360 -367.
【3】曹惟慶.連桿機(jī)構(gòu)的分析與綜合[M].北京:機(jī)械工業(yè)出版社,2002.
【4】張光澄,張雷.實(shí)用數(shù)值分析[M].成都:四川大學(xué)出版社,2009.
【5】強(qiáng)寶民,劉保杰.電液比例閥控液壓缸系統(tǒng)建模與仿真[J].起重運(yùn)輸機(jī)械,2011(11):35-39.
【6】許益民.電液比例控制系統(tǒng)分析與設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2005.
【7】劉金琨.先進(jìn)PID控制Matlab仿真[M].北京:電子工業(yè)出版社,2004.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
