基于多元非完備信息的實時濾波定軌方法
2014-09-15 05:44:48淡鵬李恒年張定波王丹
飛行力學 2014年3期
淡鵬, 李恒年, 張定波, 王丹
(1.西安衛星測控中心 宇航動力學國家重點實驗室, 陜西 西安 710043;2.西安衛星測控中心 技術部, 陜西 西安 710043)
0 引言
基于擴頻及統一S波段測控設備的外測測量數據是衛星實時軌道計算使用的一種重要觀測數據。由于此類數據中的測距、測速、測角等信息在實際采集及傳輸過程中不在一幀數據中存在,從而給同時使用這些數據的實時濾波軌道確定計算帶來一些問題,即需要先將此類數據通過時標的插值對齊及數據拼接,轉換為信息完備的數據幀使用。而這種數據的插值對齊及拼幀操作不但增加了數據處理的復雜度,而且不可避免地帶來精度損失,在對齊算法有缺陷時還會引起其他問題。因而,在實時濾波軌道計算中直接使用非完備觀測數據成為提高計算精度的有效方法之一。文獻[1]采用“當前”統計模型和UKF算法,給出了一種多測速系統實時定軌算法。文獻[2]提出了一種基于擴展卡爾曼粒子濾波的僅測角衛星被動跟蹤算法。文獻[3]利用EKF原理,提出了一種單星僅測角濾波定軌跟蹤算法。文獻[4]聯合了星間測距和測速數據,利用參數加權平差算法來提高星座定軌精度。文獻[5]對定位與測速數據融合重建軌道方法進行了研究。但這些算法基本上是針對外測數據中固定的一種或幾種觀測信息的使用,沒有將各種非完備觀測數據綜合利用。
本文在UKF算法和EKF算法研究的基礎上,通過在計算過程中進行變維矩陣及向量運算的方法將各類非完備外測觀測數據進行混合使用,并對其實現過程和使用效果進行了分析。
1 非完備外測數據觀測模型

對測距、方位角、仰角、測速各測元值有:
即可將地心慣性系的運動狀態向量轉換到測站地平系下的測量量。
2 基于變維矩陣運算的非完備外測數據混合使用方法
2.1 實現思路

2.2 UKF濾波中的變維矩陣運算實現
UKF是一種使用采樣策略近似函數非線性分布的遞歸貝葉斯估計算法[6]。該方法以采樣變換為基礎,采用卡爾曼濾波框架對數據點進行確定性采樣,而不必直接對函數進行線性化處理,具有實現過程簡單、避免了繁瑣的雅可比矩陣求導、收斂速度較快、對噪聲適應能力強等特點,是實時濾波軌道計算中使用較多的一種方法。
從UKF的算法步驟可看出,其計算過程主要為矩陣和向量運算,根據當前數據幀中狀態值S可實現各步驟涉及的矩陣及向量的維數的動態調整。

其他測元組合情況依次類推,由UKF計算公式可得,觀測方差陣PZZ、增益矩陣Kk、狀態向量與觀測向量相關協方差陣PXZ也隨之成為變維矩陣。
2.3 EKF濾波中的變維矩陣運算實現
EKF濾波是另一類廣泛使用的非線性濾波器,它是對基本卡爾曼濾波的擴展和推廣,通過對非線性函數的線性化近似處理來應用線性系統的卡爾曼濾波公式[7-8]。
從EKF算法步驟可知,設tk時刻數據幀中有效測元個數為nk,則通過設置測元的有效標志及變維向量及矩陣運算,在EKF濾波中進行非完備觀測混合使用時,觀測矩陣Hk需要根據當前幀各測元的有效標志進行變維處理,此時增益矩陣Kk、殘差向量Yk、噪聲協方差陣Rk等都需要根據nk進行變維。
2.4 各測元的野值判斷及剔除
雷達測量數據中的野值[9-11]是影響濾波性能的重要因素,因而算法實現中必須考慮抗野值問題。對EKF與UKF兩種濾波算法,野值的判斷涉及到觀測殘差與觀測協方差的運算問題。

考慮到此種判斷有一定的局限性,即不滿足此條件的情況還可能是軌道發生機動或濾波出現異常;因此判斷時可保存多點新息數據,綜合該新息序列及測站跟蹤歷史數據的野值情況判斷其是否有軌道機動發生(如采用連續多幀判斷的方法)。
2.5 實現過程對比探討


考慮到多站觀測條件下,三站測距可幾何法確定位置,三站測距測速可確定位置速度,因此,在不考慮各測站系統誤差的情況下,當測元類型固定時,使用多站信息的濾波收斂性應優于單站情況。
對于測角信息,根據RAE到測站地平系轉換公式ρx=ρcosEsinA,ρy=ρcosEcosA,ρz=sinA,當測距ρ較大時,小的測角誤差就會引起較大的定位誤差;因此在混合濾波中,應減小對低精度測角信息的信任程度。
對比UKF與EKF過程,EKF需要計算觀測向量對狀態向量的偏微分雅可比矩陣,當應用于測量模型建立在測站地平坐標系下的非完備觀測數據混用算法時,其計算過程較復雜且容易出錯;另外,EKF的線性化過程給估計帶來了一定誤差,使得該方法的濾波發散可能性增大。因此非完備數據混合方法的計算過程更多地使用UKF濾波。
3 數值仿真及分析
3.1 仿真條件
在所有可用測站共視弧段內,仿真時間段相同的情況下,使用幾類不同的非完備外測數據來驗證變維融合算法的可行性。計算時,采用的濾波狀態向量包括J2000慣性系下的位置、速度、加速度、單位質量的質量變化率,測量方程為J2000慣性系下狀態量到測站地平系下的外測觀測量的轉換。給定2013年3月8日8時的1組軌道根數如表1所示。

表1 軌道根數Table 1 Orbital element
3.2 算例1
外推計算單站測距、測角(含方位角及仰角)、測速數據并分別添加100 m,0.02°,0.1 m/s的隨機噪聲,使用UKF算法對測距、測角、測速齊備的數據及各類測元均不同幀的非完備數據進行混合計算。由半長軸與軌道外推半長軸之差得到軌道半長軸偏差σA,結果如圖1所示。可以看出,兩種方法計算的半長軸偏差曲線基本吻合。
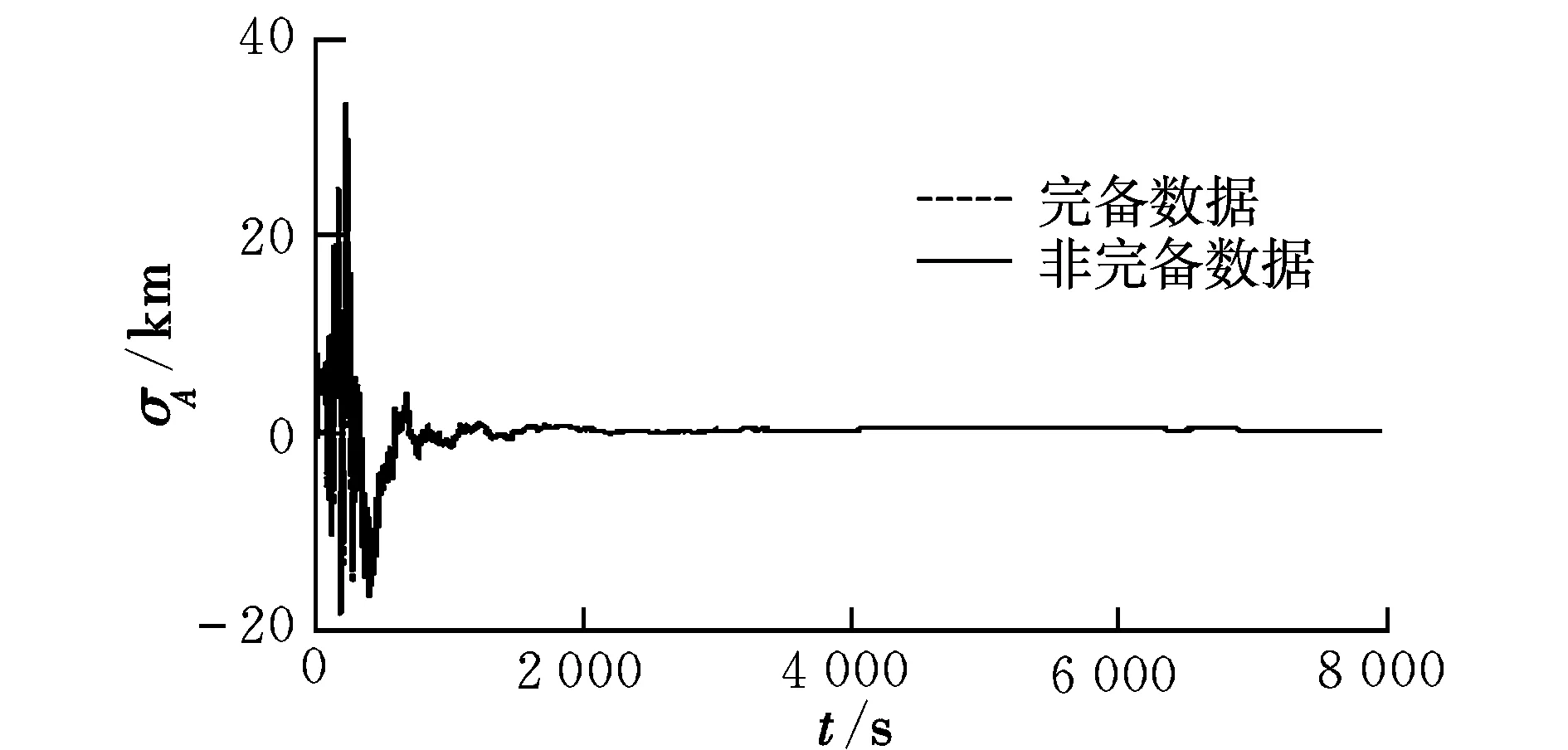
圖1 算例1軌道半長軸偏差Fig.1 Orbit semimajor axis deviation for example 1
3.3 算例2
分別使用單站測距及三站測距數據(三站均加上隨機噪聲)進行濾波,濾波時相關計算參數(濾波系數)保持不變,計算得軌道半長軸偏差如圖2所示。
從圖2中可看出,使用單站測距數據比三站測距數據濾波時的收斂速度明顯降低(仿真數據未考慮各站系統差),而且單站濾波在6 600 s左右出現異常,即只用單站測距是不穩定的(此結論只針對此仿真樣本數據及濾波算法設定的系數)。

圖2 算例2軌道半長軸偏差Fig.2 Orbit semimajor axis deviation for example 2
3.4 算例3
考慮到衛星高度較高時,小測角誤差將引起較大的定位誤差,當有較高精度的測角設備(如光學設備測角精度高于雷達)時,在混合濾波中可直接將雷達測角標志置為不可用。先仿真一個站的測距、測角數據,分別給定100 m及0.02°的隨機差進行濾波計算;再仿真一個站的測角數據,給定5″的隨機差,然后將第一站測角屏蔽,使用兩站非完備數據進行濾波計算。兩種方法得到的半長軸偏差如圖3所示。可以看出,因為第二站的測角比第一站測角精度高,濾波收斂速度明顯加快。

圖3 算例3軌道半長軸偏差Fig.3 Orbit semimajor axis deviation for example 3
3.5 算例4
使用算例1的仿真數據,改用EKF濾波算法,使用單站非完備數據計算得半長軸偏差如圖4所示。可見,EKF算法中基于變維運算進行非完備數據混用也可以得到較好的結果。
圖4 算例4軌道半長軸偏差Fig.4 Orbit semimajor axis deviation for example 4
4 結束語
通過在濾波計算中設置測元有效標志,并使用變維矩陣運算的途徑來實現非完備觀測數據混用的方法是可行的,其計算結果可以達到與完備數據同樣的精度。非完備觀測數據混用濾波的收斂性及精度與非完備測元的種類、多站的觀測幾何等相關。非完備數據混用過程中,可以通過對某些精度差的測元設置“不可用”標志的方法減少對計算精度的影響。此種基于非完備觀測信息的實時定軌方法對UKF,EKF等濾波算法都是適用的。
在實時濾波定軌中直接使用非完備數據的方法有助于減小外測數據預處理的復雜度,具有一定的實用價值。后續將重點在混用過程中的機動過程檢測、測元的動態取舍等方面進行研究。
參考文獻:
[1] 慈穎,郭軍海.基于UKF的測速定軌實時算法[J].飛行器測控學報,2007,26(6):59-62.
[2] 吳盤龍,蔡亞東,王寶寶.僅測角衛星跟蹤的擴展卡爾曼粒子濾波算法[J].紅外與激光工程,2011,40(10):2008-2012.
[3] 曹志高,高源,程洪瑋.單星只測角對低軌衛星的EKF跟蹤分析[J].飛行器測控學報,2007,26(6):70-75.
[4] 孟繁智,吳向宇,歐鋼.聯合星間測距和測速的導航星座自主定軌研究[J].飛行器測控學報,2010,29(4):89-94.
[5] 祝轉民,楊宜康,黃永宣,等.定位與測速數據融合估計彈道穩定性與精度分析[J].中國空間科學技術,2003,(4):30-34.
[6] Wan E A,Van der Merve R.The unscented Kalman filter for nonlinear estimation [C]//Proceedings of Symposium 2000 on Adaptive Systems for Signal Processing,Communication and Control(AS-SPCC).Canada:IEEE,2000:153-158.
[7] 彭丁聰.卡爾曼濾波的基本原理及應用[J].軟件導刊,2009,8(11):32-34.
[8] Li X R,Jilkov V P.Survey of maneuvering target tracking.ParkⅠ.Dynamic models[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1333-1364.
[9] 柳海峰,姚郁.Kalman濾波抗野值方法研究[J].計算機自動測量與控制,2001,9(6):60-61.
[10] 祝轉民,秋宏興,李濟生,等.動態測量數據野值的辨識與剔除[J].系統工程與電子技術,2004,26(2):147-149.
[11] 盧迪,姚郁,賀風華.一種抗野值的Kalman濾波器[J].系統仿真學報,2004,16(5):1027-1029.
