GPS與北斗電離層延遲誤差對比分析*
2014-09-14 01:35:32張飛舟楊澤民趙利軍
計算機工程與科學 2014年2期
關鍵詞:模型
張飛舟,楊澤民,程 鵬,趙利軍
(北京大學地球與空間科學學院遙感與地理信息系統研究所,北京 100871)
GPS與北斗電離層延遲誤差對比分析*
張飛舟,楊澤民,程 鵬,趙利軍
(北京大學地球與空間科學學院遙感與地理信息系統研究所,北京 100871)
在GPS與北斗的多系統定位中,使用雙系統雙頻接收機,影響電離層延遲精度的主要因素是各系統導航電文中的電離層參數。由于電離層參數的不同,采用同一電離層時延模型計算得到的電離層延遲結果互不相同,造成時延精度的差異。利用GPS/北斗接收機進行觀測,得到兩系統的電離層參數,通過模型計算兩系統在垂直方向的電離層延遲TEC,并將同一時刻、同一區域內的IGS電離層的TEC作為參考值來計算兩系統的電離層時延精度。實驗結果表明,GPS與北斗導航電文中的電離層參數存在較大差異,使得在同一地區、同一時刻兩系統的計算結果出現較大差異,利用IGS參考值求其時延精度,GPS的電離層延遲精度較北斗系統要高。
多模接收機;電離層;TEC;IGS電離層格網值
1 引言
隨著衛星導航事業的飛速發展,世界許多國家都在建設自己的衛星導航系統,各國導航系統間的對比分析相繼展開。2012年4月30日我國利用一箭雙星技術成功將第十二、十三顆北斗導航衛星送入太空預定轉移軌道,北斗區域衛星導航系統的基本系統已建設完成,目前處于開展星地聯調和在軌測試評估階段。為了進一步驗證我國北斗衛星導航系統的運行性能,需要對系統定位精度的相應參數進行對比與分析[1,2]。
在衛星導航定位過程中,單頻接收機是利用內置模型來削弱電離層延遲的影響。應用GPS與北斗的雙模接收機,由于接收到的導航電文中的電離層延遲參數不同,導致兩系統計算得到的延遲結果有較大差異。若能獲取電離層的真實值,并與GPS和北斗的計算值相減,則可得到兩種衛星電離層時延精度。因此,本文借助GPS/北斗雙模接收機,通過內置電離層模型計算延遲,將結果與IGS(International GNSS Service)的電離層參考值相減[3],求得兩衛星系統電離層延遲的精度,從而比較分析兩系統的電離層延遲精度結果。
2 電離層模型
通過接收機接收到導航電文中的電離層參數,結合觀測時刻的衛星星歷、偽距等參數,分別計算GPS與北斗在同一時刻刺穿點天頂方向的電離層延遲,將此延遲值與作為參考值的IGS電離層格網值相減來比較GPS與北斗的電離層延遲誤差精度[4~6]。
2.1 單頻接收機電離層模型
導航信號在傳播時受電離層延遲影響最大,在傳播過程中經過電離層使信號的傳播速度發生變化,傳播路徑也會有所改變,信號在天頂方向會產生超過10 m的誤差,高度角越低電離層延遲導致的誤差越大,當衛星高度角低于5°時,其延遲誤差可能超過50 m[7]。
電離層延遲受到總電子含量TEC(Total Electron Content)、信號傳輸路徑、衛星高度角、觀測時間等方面影響。接收機內置的電離層模型一般采用Klobuchar模型。計算電離層延遲的具體方法為:通過接收到的導航電文以及觀測數據,利用模型計算電離層延遲,然后反算出垂直方向的TEC。
對于北斗的電離層模型,IGSO和MEO衛星都是使用8參數而GEO衛星使用12參數。由于GPS衛星的電離層延遲均采用8參數解算,而北斗所發射的衛星只有IGSO和GEO衛星,在此只用IGSO衛星來作延遲對比。
Klobuchar模型假設晚上的電離層延遲時間為5 ns,將白天的時延看作余弦函數中正的部分。Klobuchar模型在天頂方向的改正公式為:
(1)
采用式(1)可以得到天頂方向電離層延遲距離Vion=c·ΔTion,根據電離層延遲改正公式:
(2)
則有:
因此,可以得到:
從而可以反算出垂直方向的TEC。
2.2 IGS電離層格網模型
利用模型得到的GPS/北斗電離層延遲,與電離層參考值相減,即可得到GPS和北斗的電離層延遲精度。電離層參考值數據從IGS獲取。IGS電離層格網的緯度間隔為2.5°、經度間隔為5°,高度為450 km時的全球TEC值,精度為2~8 tecu,任意經緯度的TEC值可以通過格網插值得到。從IGS下載的IONEX文件中可以得到當天的電離層數據。IGS的電離層TEC數據每隔2小時更新一次,TEC格網數據可表示為Ei=E(Ti),i=1,2,…,n。
根據歷元Ti時刻的TEC,當觀測時刻為t( |t-Ti|=min)時,有:
(3)
其中,β為緯度,λ為經度。
結合相鄰兩時刻的TEC,在這相鄰時刻內任意時刻t的TEC值可由式(4)計算得到。
(4)
這里Ti≤t≤Ti+1。

利用鄰近經緯度四個點的TEC值,通過插值運算,則可求出任意經緯度的TEC值。
3 實驗數據分析
本次實驗利用北京東方聯星科技有限公司的CNS100-BG雙系統接收機收集到的2011年6月數據,并以6月30日的數據來分析電離層延遲情況。實驗的數據采樣率為30 min/次,包括NMEA(National Marine Electronics Association)-0183觀測數據、導航電文數據等。接收機在觀測時刻接收到的電離層參數如表1所示。

Table 1 Ionospheric parameters of GPS and Beidou satellites表1 GPS/北斗衛星接收到的電離層參數
表1所列出的是接收機接收到的GPS和北斗衛星的電離層延遲參數。從表1中可以得出:(1)GPS與北斗得到的參數數值差異很大,由這些參數值計算出的延遲結果將產生較大差異。(2)GPS的參數在一段時間內均無變化;而北斗的參數則會在不同時段呈現細微變化。
根據以上參數及觀測到的NMEA數據,通過電離層模型計算得到電離層延遲,由于高度角過低會嚴重影響電離層延遲精度,在計算過程中剔除衛星高度角低于5°時的TEC值。
不同時刻可觀測的衛星不同,選用GPS 6、14、16、31號衛星以及北斗的兩顆IGSO衛星來計算電離層TEC。觀測時間從6月30日10:00~16:30,采樣間隔30 min。接收機所在位置為北緯39.998°,東經116.332°,計算結果如表2和表3所示。
從計算結果可以看出,雖然刺穿點位置不同,但大部分時間都集中在北緯37.5°~42.5°、東經115°~120°之內,其電離層TEC的差異不大,基本都在1 tecu以內。利用GPS衛星得到的參數,其計算結果在同一時刻的差異大部分都在0.5 tecu左右;而北斗IGSO衛星計算結果的差異也在1 tecu內;但是,比較GPS與北斗計算得到的TEC值,兩者出現了很大差異,由于1 tecu會引起大約 0.16 m的延遲,兩種衛星系統計算得到的電離層延遲,差異可達到2 m。圖1與圖2更直觀地反映出了GPS和北斗衛星的電離層延遲差異。
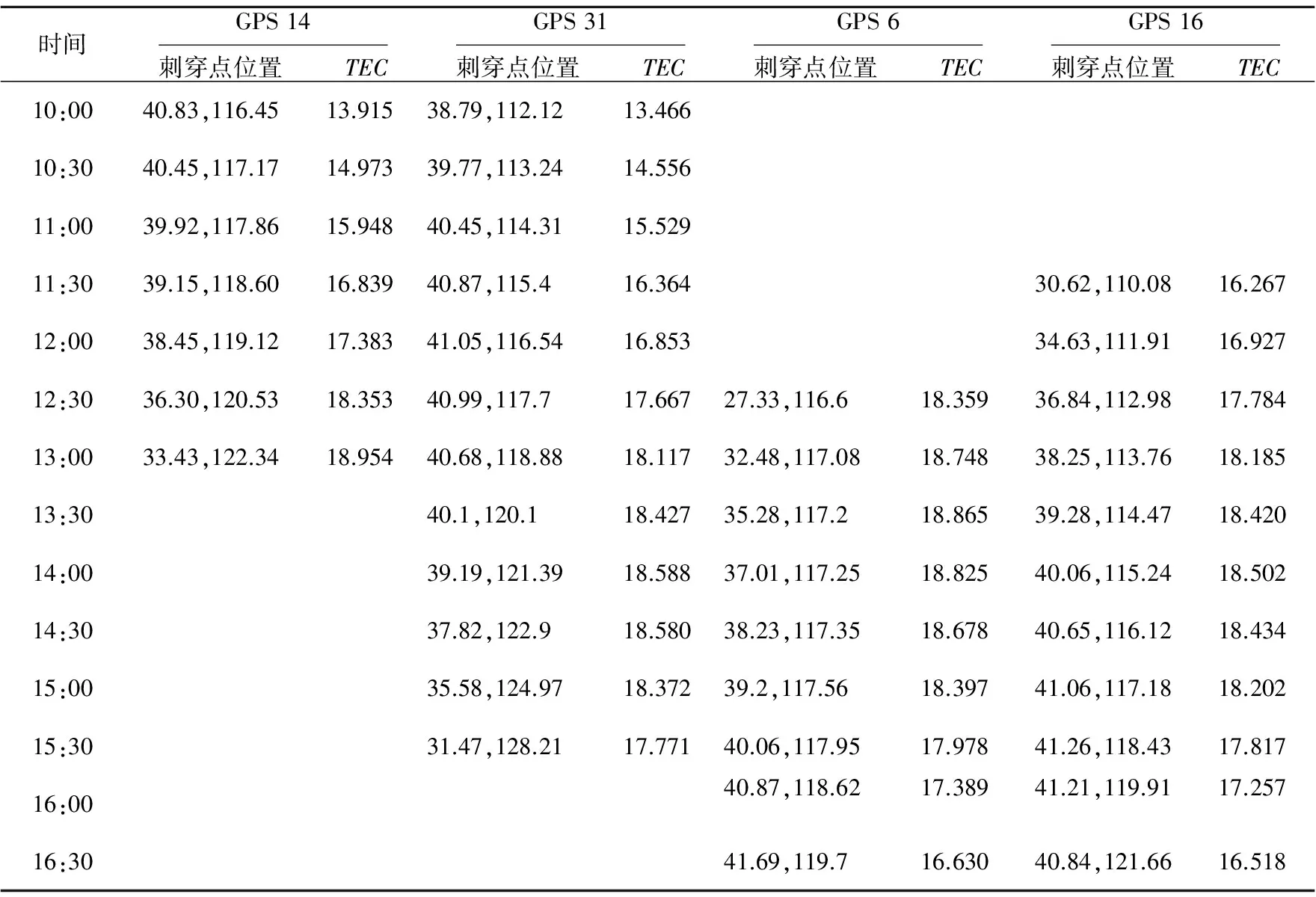
Table 2 Vertical TEC from GPS satellites表2 垂直方向GPS衛星反算得到電離層TEC值
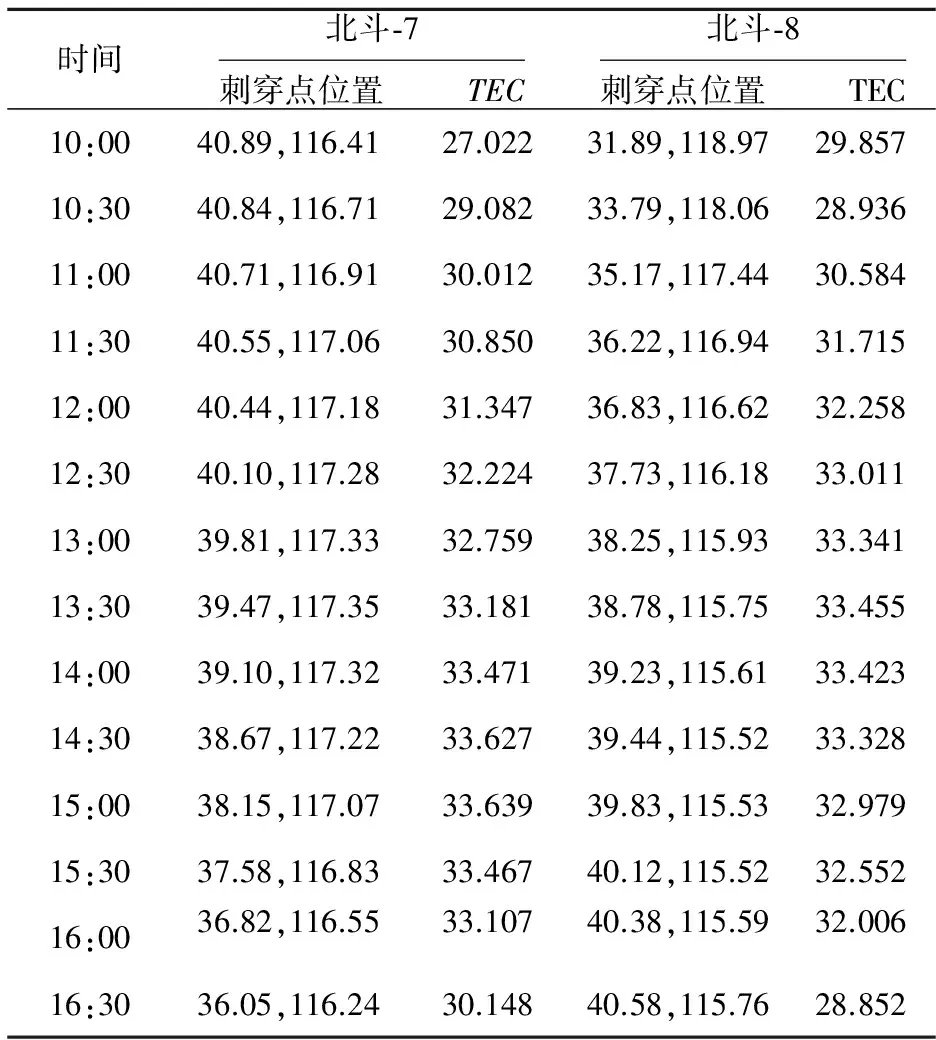
Table 3 Vertical TEC from Beidou satellites表3 垂直方向北斗衛星反算得到電離層TEC值
如圖1所示,GPS的四顆衛星的電離層延遲基本都在13~19 tecu內,同一時刻不同GPS衛星計算得到的電離層延遲基本相似,這也表明在一定經緯度范圍內,電離層的差異較小;用北斗計算得到的電離層延遲范圍在27~33 tecu內,如圖2所示,兩種導航系統計算出的結果在同一時刻大約相差14 tecu。兩衛星系統間的差異由于刺穿點位置的不同可能會造成一定影響,然而因電離層參數的不同產生的影響則更為顯著。
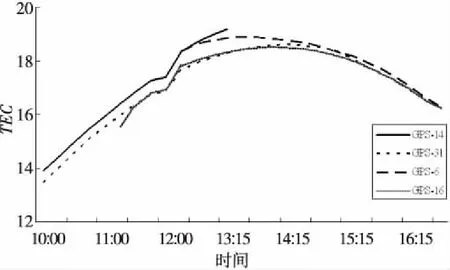
Figure 1 Vertical TEC from GPS satellites圖1 垂直方向GPS的TEC值
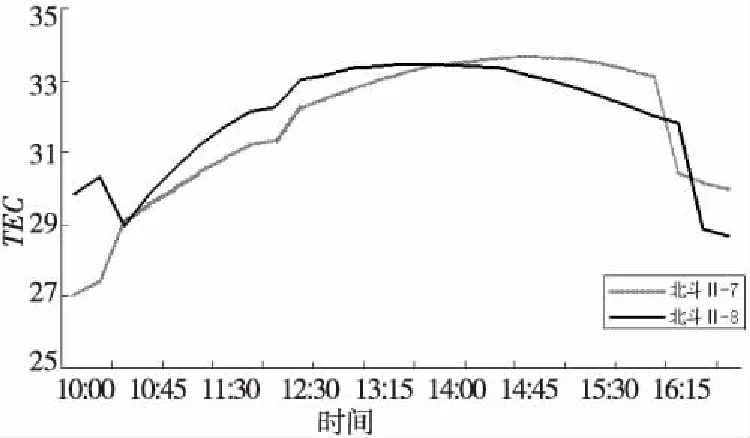
Figure 2 Vertical TEC from Beidou Satellites圖2 垂直方向北斗的TEC值
為了比較電離層的延遲精度,可下載IGS當天的電離層格網數據,并計算各時刻在各刺穿點位置上的電離層參考值,然后通過模型計算的TEC與參考值相減,從而獲得GPS/北斗的電離層延遲精度,結果如圖3和圖4所示。
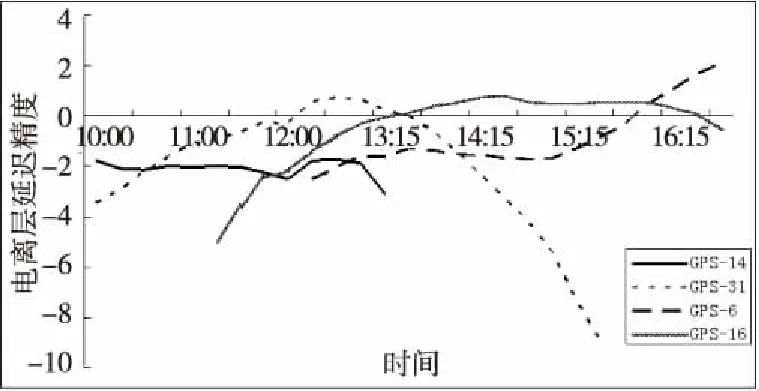
Figure 3 Ionospheric accuracy of GPS satellites圖3 GPS電離層精度

Figure 4 Ionospheric accuracy of Beidou satellites圖4 北斗電離層精度
從圖3和圖4可以看到,GPS反算得到的TEC與IGS的電離層參考值的差值很小。其中GPS 6、14號衛星的精度在2 tecu范圍內,16、31號衛星大部分時間的精度在1 tecu內;北斗的兩顆IGSO衛星電離層精度大約都在13~15 tecu。圖3和圖4則分別顯示出了GPS和北斗Ⅱ的延遲精度。對于GPS衛星,不同衛星大部分時刻的精度都在2 tecu內,而大于2 tecu的時刻刺穿點位置對精度的影響較大。對于北斗的精度,兩顆IGSO衛星大部分時刻計算得到的TEC與參考值之差都大于13 tecu。
4 結束語
從實驗可以看出,由GPS電離層參數計算得到的TEC精度基本都在3 tecu以內,與北斗參數相比精度要高,而利用北斗電離層參數計算得到的延遲精度在13~15 tecu。
借助GPS/北斗雙系統接收機可比較兩衛星系統的電離層延遲誤差。目前民用多模接收機以單頻為主,主要是根據導航電文中的電離層參數來計算延遲,電離層延遲精度主要取決于電離層參數的精度。電離層參數的選擇是通過地面控制系統根據這一天的年積日以及前5天太陽的平均輻射量,從眾多常數中選取得到的。由于GPS的地面觀測站遍布全球,觀測數據質量更好,另外美國還擁有專門從事電離層變化監測的衛星來協助電離層參數的選取,相對于目前北斗系統局部觀測站的觀測,GPS電離層參數精度更高,根據相同電離層模型,利用GPS衛星計算得到的電離層延遲精度自然較高。待北斗系統完全建成后,其電離層參數的精度將有進一步的提高。
以IGS電離層格網值作為參考,由于格網值是通過眾多IGS觀測站雙頻接收機的同步觀測后加權計算得到的,在IGS觀測站附近格網值的精度相對較高而其他位置精度較低。本次實驗,接收機位置與IGS的北京觀測站距離較近,可保證一定的電離層參考值精度。一旦民用多頻率接收機大規模出現,可利用多頻得到高精度的電離層參考值,利用該參考值與電離層參數計算得到的延遲值相減可獲得更高精度的電離層系數比較結果。
[1] Yang Yuan-xi, Li Jin-long. The great contribution to global PNT users of China’s Beidou satellites system[J]. Chinese Science Bulletin, 2011,56(21):1734-1740.(in Chinese)
[2] Beck T, Trautenberg H L, Soualle F. Future satellite navigation system architecture system performance[C]∥Proc of Institute of Navigation, 2010:1157-1171 .
[3] International GNSS Service (IGS) network[EB/OL].[2010-08-26].http://igscb.jpl.nasa.gov/.
[4] Liu Jun, Chai Hong-zhou. Study on GPS/BD-2 VTEC model based on grid[J]. Science of Surveying and Mapping, 2011,36(3):34-36.(in Chinese)
[5] Keith D M, Christopher H. Post-modernization GPS performance capabilities[C]∥Proc of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation,2000:242-249.
[6] Tom C, Dorsey A J, Mendicki P J, et al. Summary of improvements from the GPS legacy accuracy improvement initiative[C]∥Proc of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation,2007:2481-2498.
[7] Li Zheng-hang, Huang Jin-song. GPS survey and data processing[M]. Wuhan:Wuhan University Press, 2005.(in Chinese)
附中文參考文獻:
[1] 楊元喜,李金龍. 中國北斗衛星導航系統對全球PNT用戶的貢獻[J]. 科學通報,2011,56(21):1734-1740.
[4] 劉軍, 柴洪洲. 基于格網的GPS/BD-2組合系統電離層VTEC模型研究[J]. 測繪科學,2011,36(3):34-36.
[7] 李征航,黃勁松. GPS測量與數據處理[M]. 武漢:武漢大學出版社,2005.
ZHANGFei-zhou,born in 1966,PhD,associate professor,his research interests include satellite navigation, ITS and Internet of things.
ComparisonofionosphericdelayaccuracybetweenGPSandBeidou
ZHANG Fei-zhou,YANG Ze-min,CHENG Peng,ZHAO Li-jun
(Institute of Remote Sensing & Geographic Information System,Peking University,Beijing 100871,China)
In the compatible process of GPS and Beidou, if it uses two-system two-frequency receiver, the main factor influencing the ionospheric delay accuracy is the ionospheric parameter in each system’s ephemeris. Due to the difference of the two systems’ parameters, when it applies the same ionospheric delay model to acquire the ionosphericTEC, the final results will show somewhat differences. When taking the use of GPS/Beidou multi-mode receiver, it can obtain the ionospheric parameters in GPS and Beidou’s ephemerides to acquire delayTECwith the ionospheric model. Then the IGS ionosphericTECin the same place and same time will be seen as the reference so that it can make contrast with GPS and Beidou’s ionospheric delay accuracy. In the experiment, the parameters in the two systems’ ephemerides show the significant differences so that once it use the same Klobuchar model, it will bring differentTEC. When theTECresults from GPS and Beidou subtract IGS reference value, the final results show that the accuracy of GPS is higher than the Beidou’s.
Multi-mode receiver;ionosphere;TEC;IGS ionospheric grid
2012-06-04;
:2012-09-10
國家863計劃資助項目(2009AA12Z325)
1007-130X(2014)02-0270-05
V11
:A
10.3969/j.issn.1007-130X.2014.02.014

張飛舟(1966-),男,陜西漢中人,博士,副教授,研究方向為衛星導航、智能交通系統和物聯網。E-mail:zhangfz@pku.edu.cn
通信地址:100871 北京市海淀區頤和園路5號北京大學遙感樓Address:Remote Sensing Building,Peking University,5 Yiheyuan Rd,Haidian District,Beijing 100871,P.R.China
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
