樹木移植機鏟刀的變密度拓撲優化分析
2014-09-13 07:21:08孟兆新范恒博王亮亮
森林工程 2014年3期
孟兆新,范恒博,王亮亮
(東北林業大學 機電工程學院,哈爾濱 150040)
樹木移植機按照配用動力可分為牽引式、自行式和懸掛式,按照鏟刀的形狀可分為U型鏟刀式、彎鏟式和鍬鏟式,按照鏟刀的數量可以分為三鏟式和四鏟式。目前廣泛應用的是四片鍬鏟式樹木移植機。工作時,鏟刀被固于樹木的根部,在自身液壓系統或者外界設備系統提供的液壓力作用下開始入土剪切土壤和樹根,合攏的鏟刀使得樹根部的土壤形成一個半圓錐形的土球,土球和樹根部分被鏟刀提升到地面,完成樹木移植工作。
鏟刀結構是樹木移植機的關鍵結構,但是沒有計算鏟刀在入土過程中的阻力計算模型,所以在設計過程無法獲得在設計過程中的相關數據的準確值。由于鏟刀結構在入土過程中的受力情況比較復雜,運用ANSYS軟件分析鏟刀在入土過程中與土壤的接觸過程,從ANSYS的后處理模塊中可以直觀地看到鏟刀結構各個部分的受力情況,從而知道鏟刀結構的最大受力點和最小受力點,為以后的鏟刀的改進設計提供數據和理論依據,從而提高鏟刀的壽命和工作效率,并且預測鏟刀可能出現的問題。
1 鏟刀入土過程力的理論分析
本文所研究的是四鏟式樹木移植機的鏟刀結構,其結構如圖1所示,四鏟式挖樹完成之后的土球為半圓錐形土球。
圖1 鏟刀的模型
在研究過程中,將鏟刀結構的入土過程簡化,簡化的結果是:鏟刀在一定的載荷作用下,在入土角的存在下與水平面成一定的角度勻速下鏟,對土壤進行剪切。鏟刀結構與土壤間的相互作用力F為:
F=Fu+Fv+Fa
(1)
式中:Fu為鏟刀本身位移產生的相互作用力;Fv為鏟刀本身速度產生的相互作用力;Fa為鏟刀本身加速度產生的相互作用力。
由于在前面已經簡化,鏟刀結構是勻速入土,所以忽略由于加速度產生的慣性力Fa。由于此模型適合于理論研究,但是具體的數值難以計算,所以本文采用顧正平等人得出的直鏟式下鏟阻力的經驗公式[2-3]:
F=0.130 7x1.138 4γ0.755 3c0.244 7(13.927 5+0.563 3×100.024 3β)
(2)
式中:x為鏟刀結構的下鏟位移量,取鏟刀的鏟高(1 m);γ為土壤容重(1.34 g/cm3);c為土壤內聚力(44.126 445 kPa);β為鏟刀體圍角的半角(60°)。
在本文中,鏟刀結構的入土角取45°,通過上式計算得出鏟刀結構在入土過程中的阻力值為:67.2kN。
2 鏟刀有限元模型的分析
對模型進行分析的步驟如下:
(1)對模型進行網格劃分,得到網格劃分如圖2所示(劃分網格數9 018,結點數為18 579)。
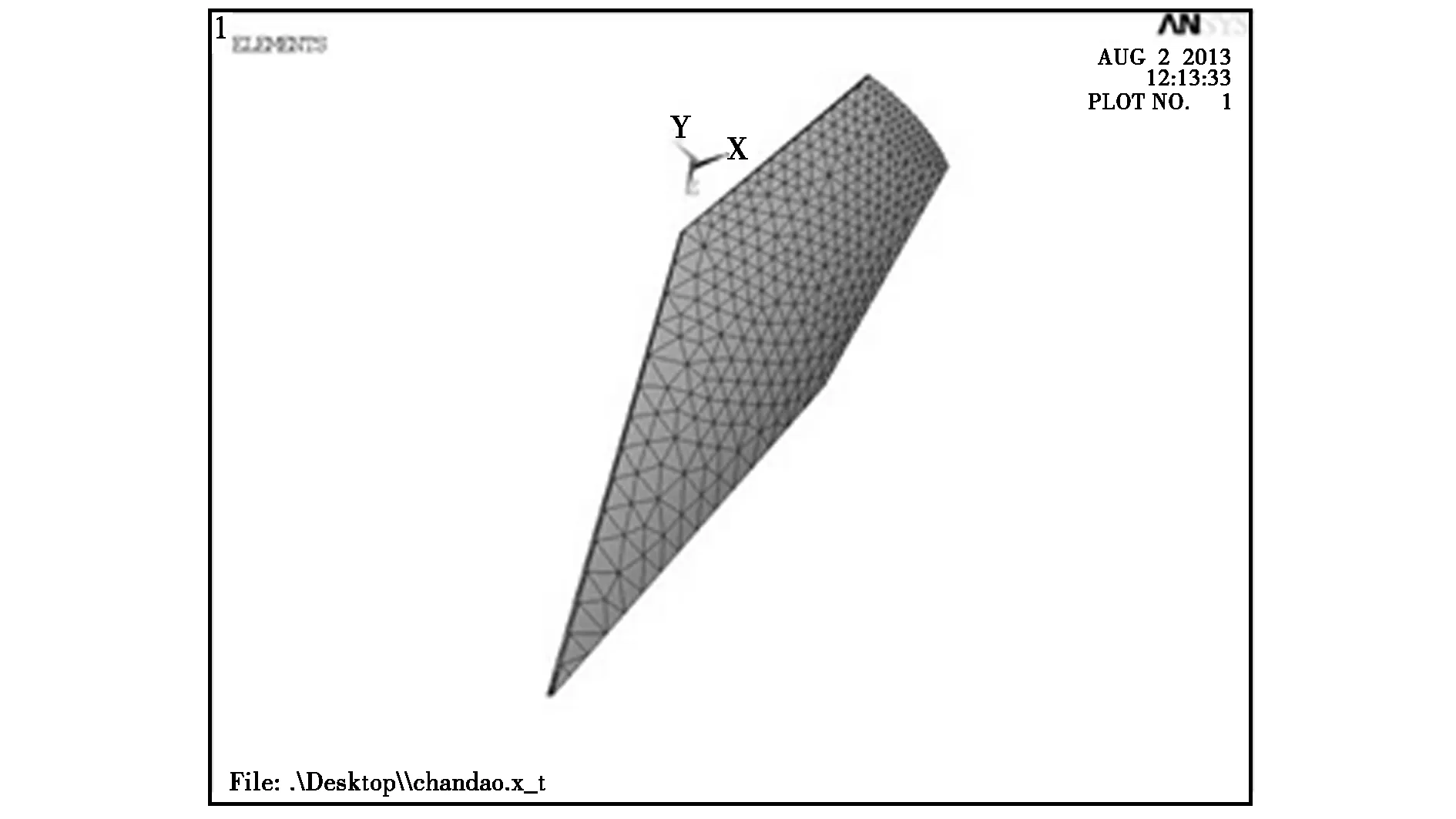
圖2 網格劃分
(2)對模型進行約束和加載,在鏟刀的入土過程中,鏟刀面的內外側表面都始終與土壤接觸,并且有接觸力,鏟刀內側的力來自于半圓錐形土球的重力,而且受到了F的力,鏟刀外側的力、重力和F力平衡。將各個力加載到模型中并且進行約束[4-9]。
(3)對模型進行優化。通過ANSYS的求解,得到的應力效果如圖3所示。
從圖中可以看出:受力最大的部分是鏟刀入土側的兩個刀尖,最大的力是2.75×103MPa;其次是施加力的部位、施加力部位與鏟刀入土側之間組成的矩形區域,受到的力在30.5~91.6MPa;受力最小的是鏟刀施加力部位以上的部分和矩形以外的部分,受到的力9 057Pa。
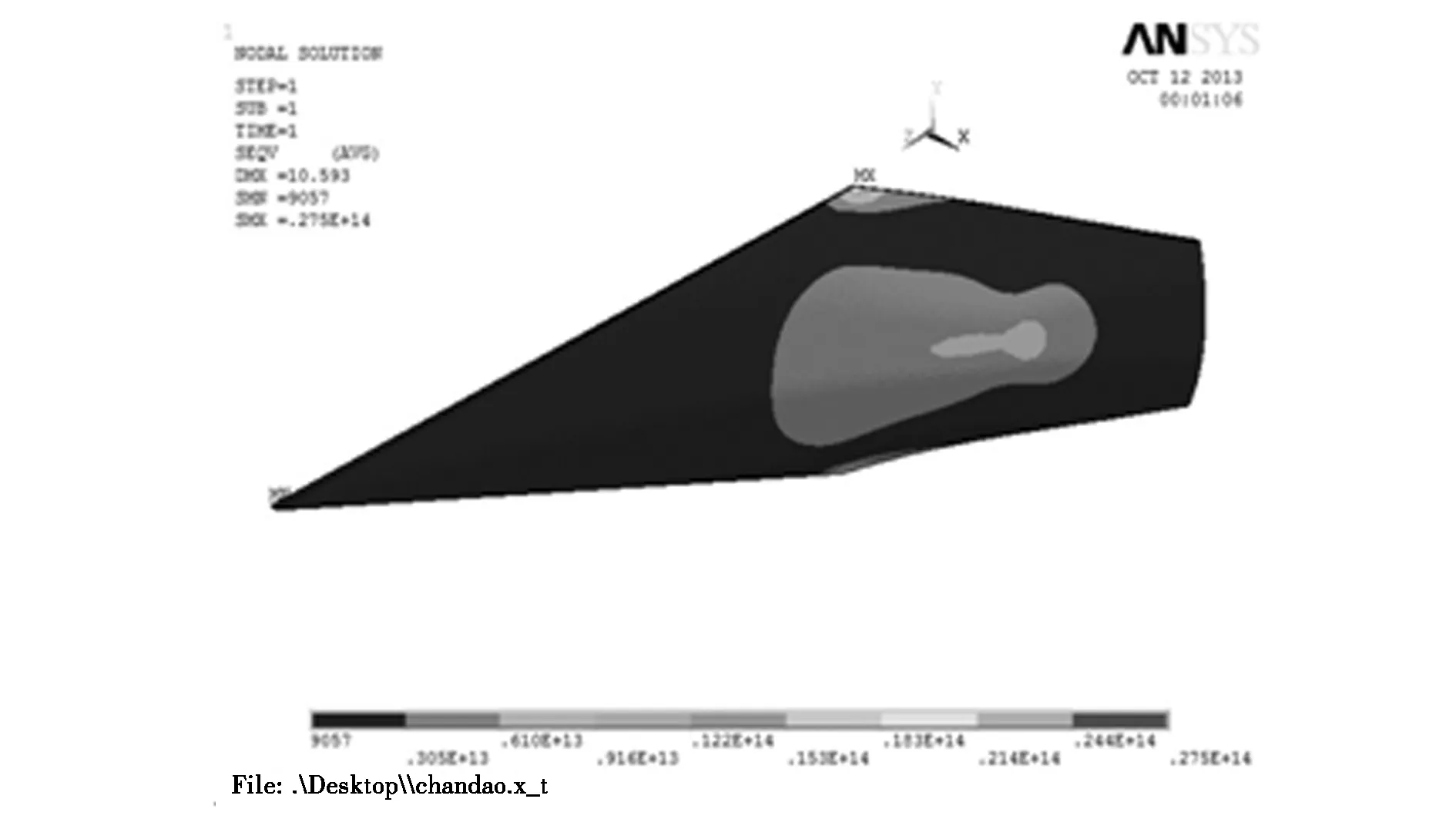
圖3 模型的應力圖
從應力圖中得到結論:鏟刀入土側的兩個刀尖應該做成圓角,避免應力的集中;矩形區域是受力交大的部分,應該加鏟槽以增加剛度;施加力部位以上的部分的鏟刀應該減少厚度,以減小鏟刀在入土過程中收到的阻力。
通過ANSYS的求解,得到效果圖如圖4所示。從中找到不同步優化過程中的效果圖和最后優化的效果圖如圖5所示。
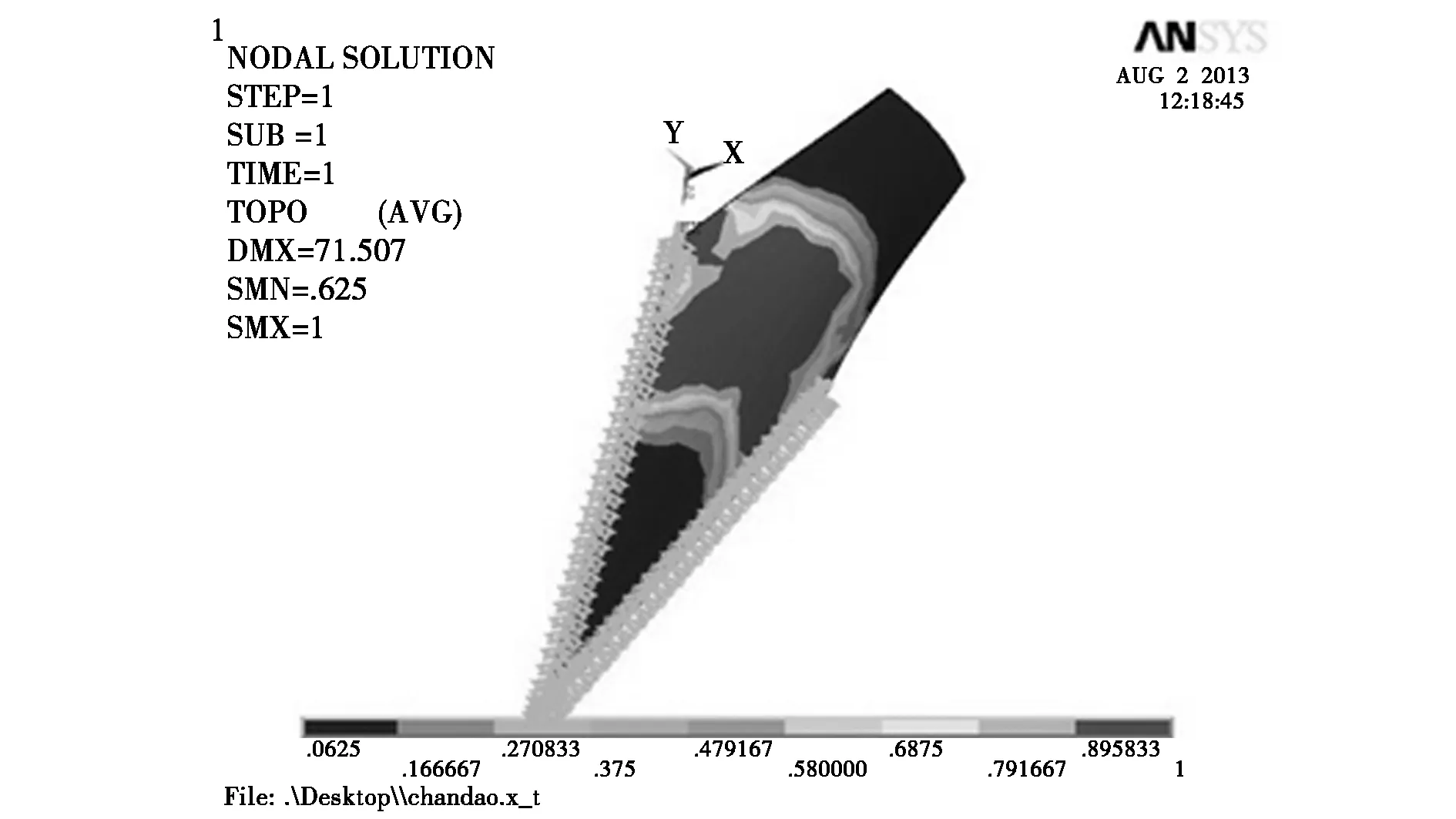
圖4 第2步的優化效果
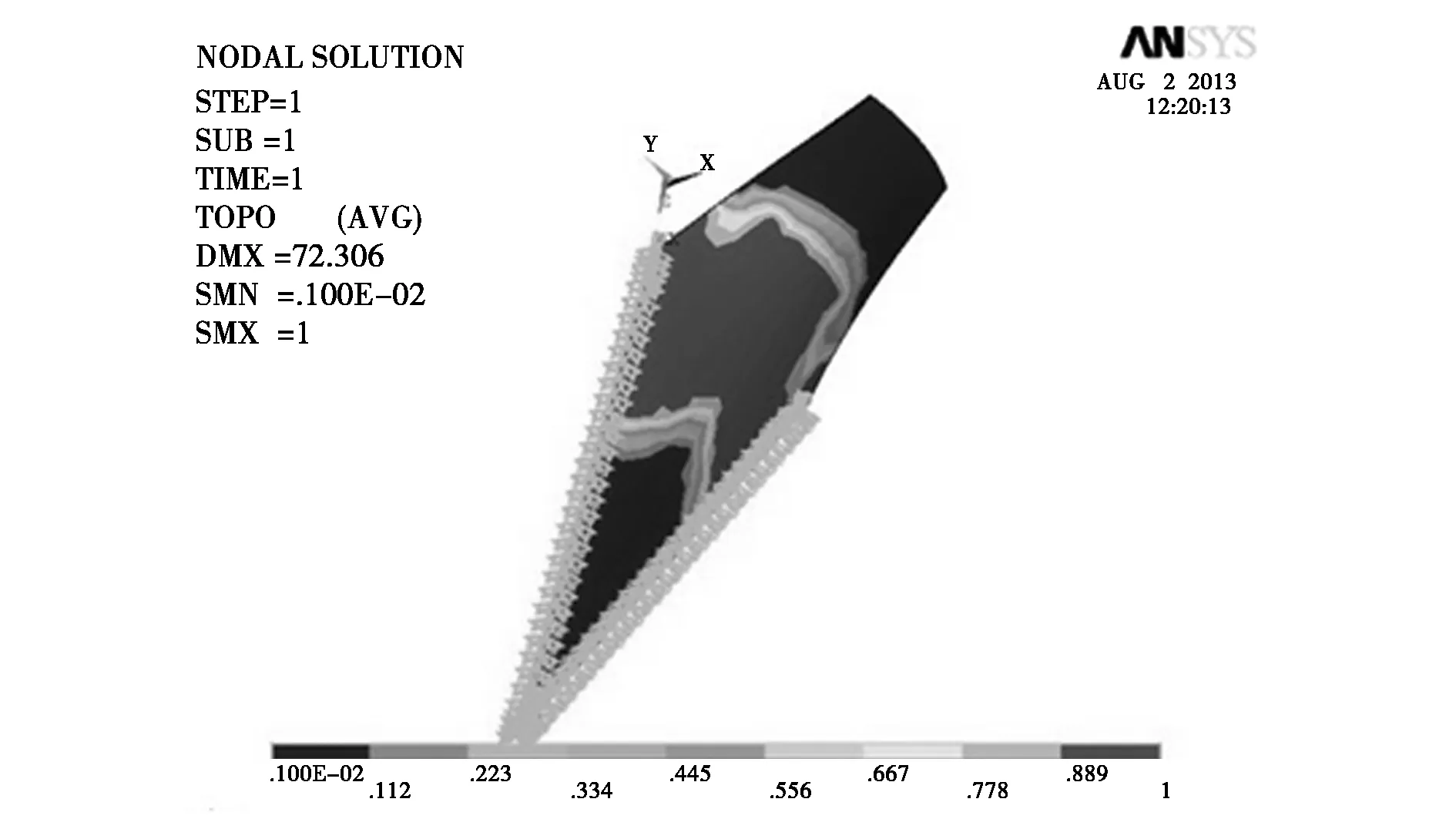
圖5 第6步的優化效果
拓撲優化的最終效果如圖6所示。
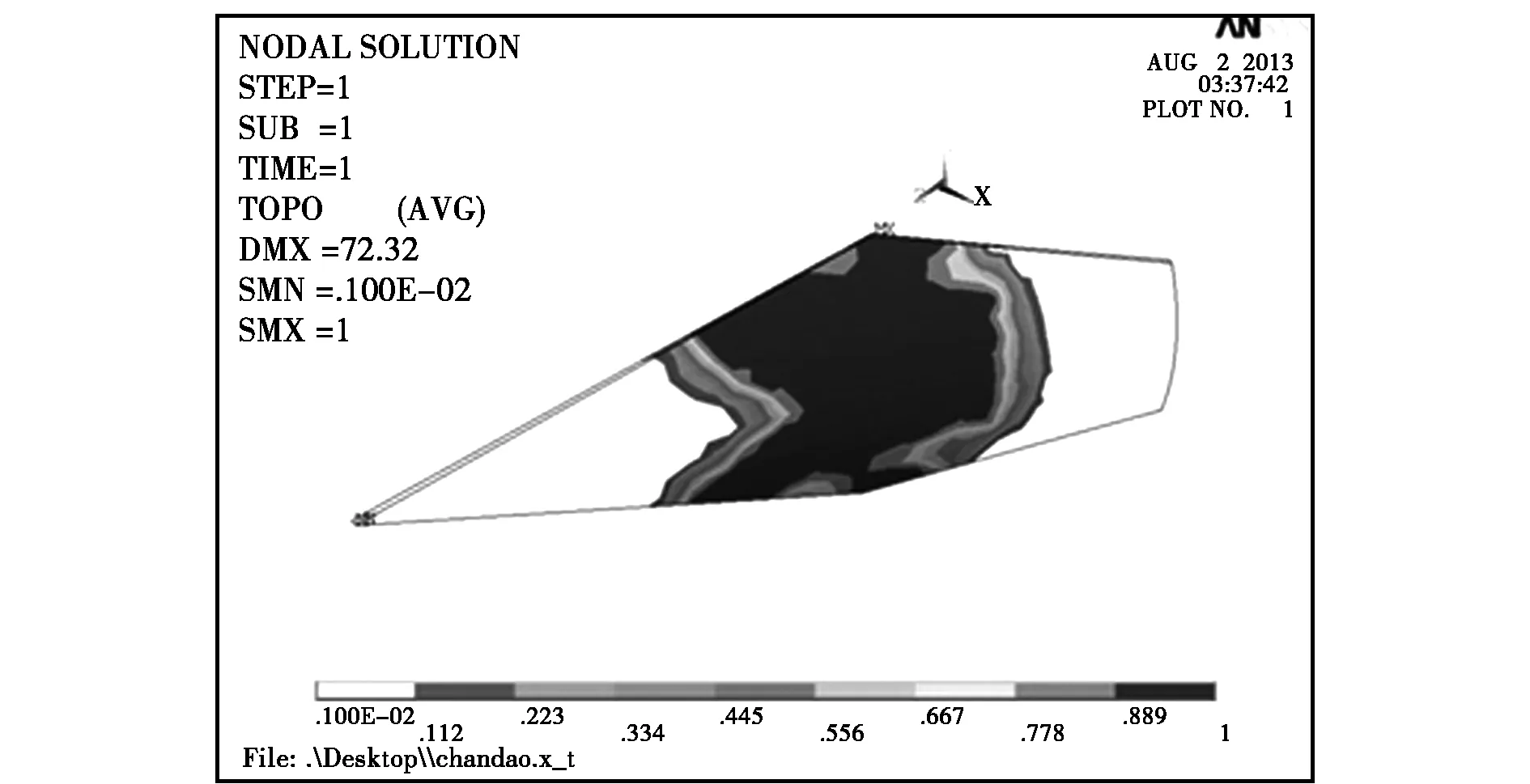
圖6 拓撲優化的最終效果
(1)圖6所示的是拓撲優化的最終效果圖為鏟刀的改進設計提供了數據和理論依據,解決了設計人員沒有準確數據的難題。
(2)在工業上可以根據此圖對鏟刀各部位的厚度進行合理分布或者改進原有的鏟刀,為提高鏟刀的效率和壽命的設計提供了參考。改進措施有:在虛密度大的部分予以加厚或者加以刀槽以加強其強度,對于虛密度較小的部分使其厚度減小以減小鏟刀的入土阻力。
(3)從應力云圖中可以看出,鏟刀的中心偏上部位是受到最大應力的地方,以應力最大的部分為核心逐漸向外擴散,應力逐漸變小,而鏟刀的刀尖部位沒有明顯的大應力。所以可以適當的增加鏟刀刀尖的鋒利程度,以提高鏟刀剪切土壤和樹木根部的能力。
(4)合理的分布厚度節約了材料,提高了鏟刀的剛度,提高鏟刀的壽命;減小了刀尖的厚度使得入土阻力減小,提高了工作效率;并且根據應力圖可知鏟刀的受力情況,預測鏟刀可能出現的問題。
3 結束語
通過對鏟刀結構的拓撲優化分析,得到鏟刀結構的偽密度云圖,為鏟刀的改進設計提供數據和理論依據,解決設計人員沒有準確數據的難題;同時對鏟刀質量的合理分布提供了模型,保證了材料的最大的利用率,避免鏟刀改進設計的盲目性。
【參 考 文 獻】
[1]宋海兵,王春宏.樹木移植機下鏟過程土壤與鏟刀接觸受力分析[J].林業機械與木工設備,2013,41(2):42-43
[2]張英彥,顧正平.直鏟式樹木移植機下鏟阻力的探討[J].北京林業大學學報,1988,10(2):38-45
[3]顧正平,張英彥.模型鏟預測樹木移植機下鏟阻力的研究[J].林業科學,1988,24(2):185-194.
[4]周 寧.ANSYS機械工程應用實例[M].北京:中國水利水電出版社,2006.
[5]孫 斌.小型振動式樹木移植機設計與仿真[D].西安:西安理工大學,2011.
[6]薛子萱,呂新民,唐衛衛.螺旋刀具土壤切削過程模擬分析-基于ANSYS/LS-DYNA971[J].農機化研究.2011,4(4):13-16.
[7]姜 濤.基于SPH法的板結土壤反旋鑿切有限元仿真研究[D].杭州:浙江工業大學,2009.
[8]李曉祥,林嘉棟,侯業華.應用ANSYS對齒輥破碎機齒輥結構優化及應力分析[J].林業機械與木工設備,2013,41(3):31-34.
[9]李芝茹,吳曉峰,羅菊英,等.基于Ansys Workbench 的BYJ-800型油茶嫁接機穗木切削機構的仿真[J].林業機械與木工設備,2013,41(10):17-20+25.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
