盾構刀盤驅動多電機同步控制策略研究
2014-09-07 01:27:24任穎瑩周建軍王助鋒張合沛李宏波
隧道建設(中英文) 2014年12期
任穎瑩,周建軍,王助鋒,張合沛,李宏波
(1.盾構及掘進技術國家重點實驗室,河南 鄭州 450001;2.中鐵隧道集團有限公司,河南 洛陽 471009)
盾構刀盤驅動多電機同步控制策略研究
任穎瑩1,2,周建軍1,2,王助鋒1,2,張合沛1,2,李宏波1,2
(1.盾構及掘進技術國家重點實驗室,河南 鄭州 450001;2.中鐵隧道集團有限公司,河南 洛陽 471009)
為了保障盾構刀盤驅動系統能夠穩定運行,刀盤驅動電機之間的同步性能是一個關鍵因素。針對盾構電機數量多、結構復雜的特點,分析主從控制、并行同步控制和幾種耦合控制在盾構驅動電機控制應用中的優缺點,說明并行同步在應用中的合理性;設計一種模糊PID智能控制算法,提出模糊PID控制器與并行同步控制結構相結合的盾構刀盤驅動多電機同步控制策略,應用Matlab/simulink進行建模仿真,對該控制策略和常規的PI控制進行仿真對比。結果證明:所提出的控制策略的動態響應快、實時性能好,在相同的負載突變狀況下,該方法具有更強的魯棒性,能更好地使多電機以設定速度同步運行。
盾構;刀盤驅動;多電機;并行同步控制;模糊PID
0 引言
刀盤系統是土壓平衡盾構的一個關鍵部分,其承擔著挖掘切削土體的重大任務;刀盤驅動又是刀盤系統的核心,其控制質量直接決定著盾構掘進的穩定性和可靠性。盾構在掘進過程中,由于地層是不均勻的,且地質狀況復雜多變,極易造成驅動電機輸出轉矩不同步而引起斷軸等重大事故。因此,盾構刀盤驅動的多電機同步控制問題,一直是國內外的一個研究熱點。
目前對這方面的研究主要集中在控制結構上,史步海等[1]重點分析了主從式同步控制和并行同步控制2種典型控制結構的優劣性;Ran LIU等[2]提出一種閉環控制的環形耦合控制系統,達到自適應均載的目的;張承慧等[3]提出一種基于相鄰耦合誤差的多電機同步控制策略。這些研究雖然也取得了一定的成效,但在控制算法中利用的仍是PI控制,由于刀盤驅動系統的非線性、大延時等特點,在實際應用中受到了很大限制[4]。
模糊控制特別適應于非線性復雜系統,對控制對象的參數不敏感,可以很好地抑制系統中的干擾和突變。因此,本文先分析目前控制結構的優缺點,找出一種適合的結構與現代控制方法相結合,提出一種適用于多電機傳動系統的同步控制算法模糊PID并行同步控制算法,這種控制策略結構簡單,在盾構控制中容易實現。仿真結果表明,此控制方法可以提高控制系統的響應速度,可有效緩解負載突變所帶來的同步誤差。
1 刀盤驅動系統及其特點
盾構的刀盤驅動系統主要包括變頻器、電動機、減速器、主軸承及其密封潤滑裝置等。由圖1(主驅動三維)可以看出,盾構主驅動各電機經過各自的減速器與一個和刀盤等直徑的大齒輪嚙合來驅動整個刀盤[5]。
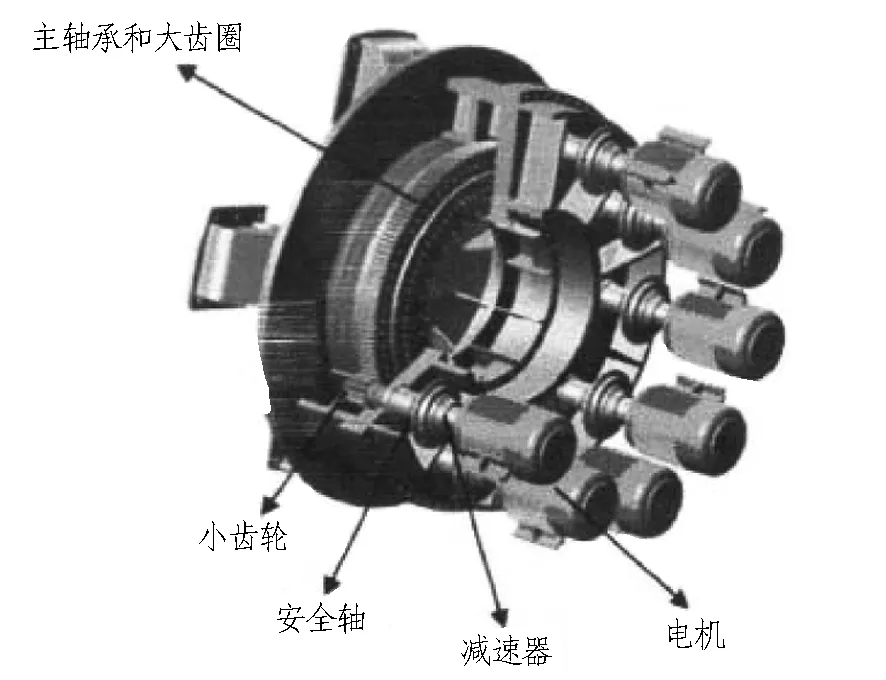
圖1 盾構主驅動三維圖
與其他需要負載平衡的多電機同步控制相比,盾構刀盤驅動具有很大的特殊性。一是盾構刀盤驅動具有刀盤驅動的電機數量較多;二是機械傳動復雜,傳動比大,若控制不當,很容易造成傳動機構的損壞;三是電機與刀盤齒輪是剛性連接,這種靠機械結構形成的同步,其所承受的扭矩未必是相同的。這些特殊性造成了盾構刀盤驅動同步控制的困難,因此對電機驅動同步控制策略進行研究意義重大。
2 多電機同步控制策略
多電機同步控制結構主要包括并聯控制,主從控制2種非耦合控制和一些耦合控制策略[6]。對盾構刀盤同步控制系統的研究主要還是集中在并行同步控制和轉矩主從控制策略的研究和改進上。
2.1 主從控制
主從控制的結構如圖2所示。在這種情況下,主電機的輸出轉速值作為從電機的輸入轉速值。由此可以得出,從電機能夠反映并且跟隨任何加在主電機上的速度命令或者是從電機的負載擾動。
在這種控制方式中,當主電動機的負載受到擾動時,所有從電動機都會受其影響;但是,當任何一臺從電動機的負載發生變化時,其他所有電動機不會受到影響,這樣就會造成個別電機不同步。
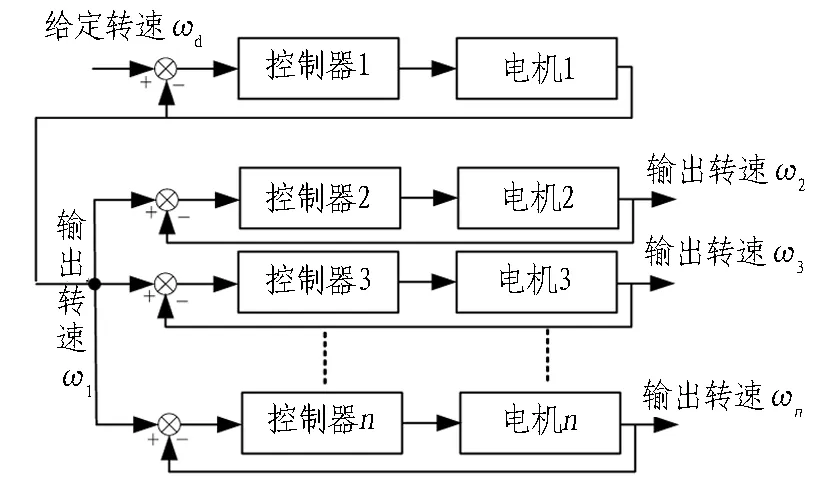
圖2 主從控制結構示意圖
2.2 并行同步控制
并行同步控制是基于相同的給定參考輸入信號,各電機獨立運行的控制模式。其控制系統結構如圖3所示。
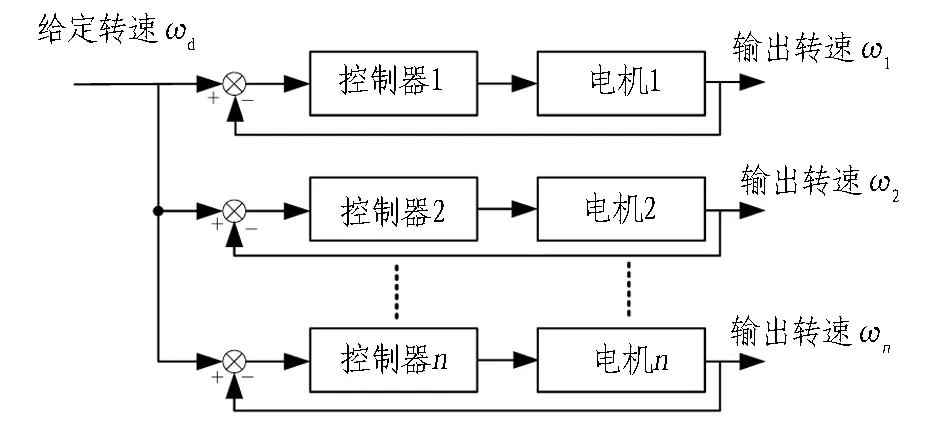
圖3 并行同步控制結構示意圖
在并行同步控制系統中,各單元獲得的輸入信號只受參考信號作用,不受任何其他因素的影響,所以任一電機的擾動不會影響任何其他電機的工作。并聯運行的同步控制系統優點在于啟動、停止階段系統的同步性能很好,結構簡單易實現,不同的單元不受距離的限制,可滿足一定條件下的同步要求。
2.3 耦合同步控制
耦合控制方式主要有虛擬總軸控制、交叉耦合控制和偏差耦合控制等。交叉耦合控制原理圖如圖4所示。與非耦合控制相比,交叉耦合控制主要的特點就是將2臺電機的速度信號進行比較,從而得到一個差值作為附加的反饋信號,再將這個反饋信號作為跟蹤補償信號,使系統能夠接受任何一臺電機的負載變化,從而獲得良好的同步控制精度。但這種控制方式對于超過3臺電動機的同步控制中不適合,因此盾構中一般不采用此方法。另外,由于耦合系數選擇的好壞對同步性能的影響至關重要,而在實際應用中,很難將耦合系數調整到最佳值。另外2種是交叉耦合的發展延伸,同樣存在上述缺點。
2.4 控制方式的選擇
通過以上分析可知,由于刀盤驅動電機數量較多,采用耦合控制會很復雜實現起來會很麻煩[7]。主從控制從理論上來說可以滿足同步及力矩平衡的要求,但是在實現這種控制方式過程中存在一個通信實時性的問題,即主變頻器與從變頻器信號傳輸的實時性,因為主變頻器的力矩信號由變頻器的信號給定,當遇到負載波動比較大的情況時,信號傳輸過程的延時,將會導致主從之間出力不均衡,此時通信的實時性直接影響到整個系統穩定運行。
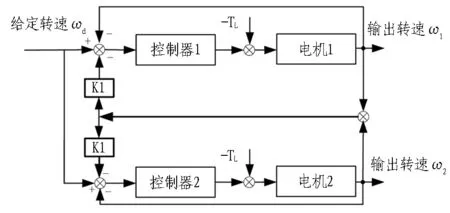
圖4 交叉耦合控制結構示意圖
并行同步控制有其突出的優點,每臺變頻器對應控制一臺電機,各變頻器之間無需聯系,其特點是系統結構簡單,易實現,控制的關鍵是要求電機的負載差異小,即各電機的機械特性保持一致,從而達到多個電機負載平衡。根據并行控制的原理,只要保證各個電機的速度一致,則各個電機所輸出的力矩就可保持平衡,所以在控制中只要保證速度一致即可。基于綜合考慮本系統采用并行同步控制策略,為了使控制性能更加完善,下面對控制算法進行研究。
3 模糊PID在多電機同步驅動中的應用
3.1 控制器的設計
PID控制具有原理簡單、易于實現、適用面廣的特點,但由于多電機同步控制系統具是一個多變量、高耦合、非線性的系統,一組整定好的PID參數不能很好地滿足控制的要求[8-9];而模糊控制由于其控制規則總結了工程技術人員的經驗知識,不需要控制對象具有精確的數學模型就可以使得控制系統具有很好地魯棒性[10]。結合兩者的特性,本文采用了模糊PID控制算法。如圖5所示,以速度的誤差e及誤差變化率ec作為控制器的輸入,基本論域分別為[-180,180]、[-150,150]。輸出用來對PID的參數進行調整,為了避免參數分檔造成的階梯變化,一般輸出只是作為一個修正值,即根據輸入計算出的ΔKP,ΔKI,ΔKD,這樣可以實現PID參數的在線自整定,這樣可以快速減小同步誤差,從而達到比較好的控制效果,其基本論域分別為[-3,3]、 [-0.06,0.06]、 [-3,3]。KP0,KI0,KD0為控制參數的初值,由用戶設定,這樣用戶可以對參數進行宏觀調控,可以彌補模糊推理所造成的誤差,更好地增強系統的魯棒性。
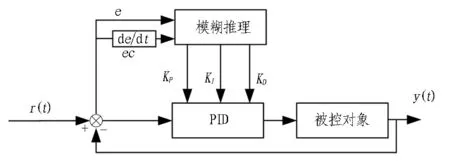
圖5 模糊PID控制結構圖
根據專家經驗,在本設計中,將2個輸入e和ec的絕對值,3個輸出ΔKP,ΔKI,ΔKD模糊子集進行常規的劃分,即負大(NB)、負中(NM)、負小(NS)、零(Z)、正小(PS)、正中(PM)和正大(PB)。將e,ec,ΔKP,ΔKI,ΔKD的基本論域定義為模糊集上的模糊論域:e,ec={-5,-4,-3,-2,-1,0,1,2,3,4,5};ΔKP,ΔKI,ΔKD={-5,-4,-3,-2,-1,0,1,2,3,4,5}。輸入模糊變量|e|,|ec|和輸出變量ΔKP,ΔKI,ΔKD隸屬度函數均采用對稱三角形隸屬函數。
3.2 模糊PID控制器控制規則
模糊PID控制算法中最重要的一步就是對PID參數進行自整定,關鍵是找出ΔKP,ΔKI,ΔKD和偏差及偏差變化率之間的關系,即模糊規則表,根據對以往工程實際操作經驗的總結,制定出合理的模糊規則表。當|e|較大時,為了使系統具有較好的跟隨性能,應取較大的KP和較小的KD,為了避免出現超調現象,KI最好為零;當|e|和|ec|適中時,為使系統具有較小的超調量,KP應取小值,取值始終,KD的取值對系統的影響較大,為保證系統的響應速度,取值也要大小適中;當|e|較小時,為使系統有良好的穩態性能,KP和KI的取值應該增大,KD的取值與|ec|的大小關系很大,當|ec|較小時,取值要大一點,當|ec|較大時,取值應小一點,目的是為了避免系統在設定值附近出現振蕩,提高其抗干擾性能。根據上面分析和實踐經驗,制定出ΔKP,ΔKI,ΔKD的模糊規則表,如表1—3所示。
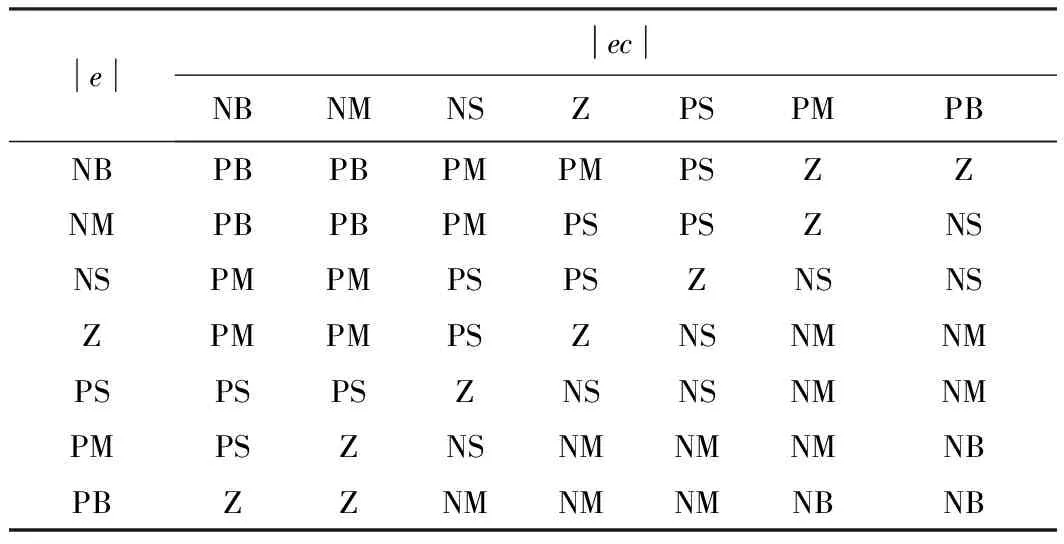
表1 ΔKP的模糊規則表Table 1 Fuzzy rules of ΔKP
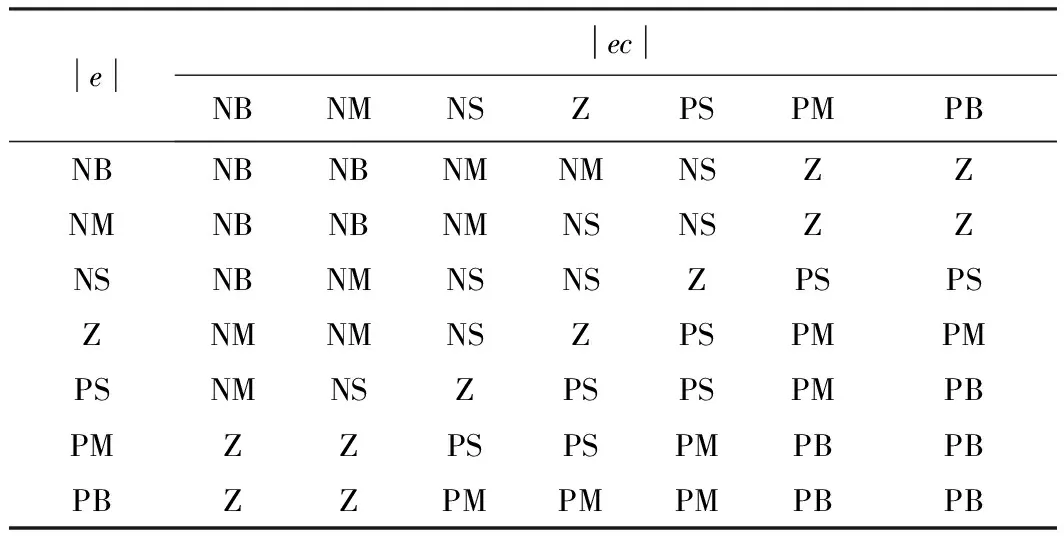
表2 ΔKI的模糊規則表Table 2 Fuzzy rules of ΔKI

表3 ΔKD的模糊規則表Table 3 Fuzzy rules of ΔKD
本文采用重心法解模糊輸出,根據|e|和|ec|的變化,得到ΔKP,ΔKI,ΔKD的值,經過式(1)計算得到PID控制器的參數KP,KI,KD。
(1)
4 仿真
本文對多電機同步驅動仿真利用matlab中的simulink模塊仿真軟件,一個電機對應著一個模糊控制器,在實際應用中,可以根據電機的性能對模糊PID控制的初始參數和模糊規則進行相應的調整。
電機選擇額定電壓380 V,額定頻率50 Hz,額定功率110 kW,極對數為2對的三相異步電動機模型,Tm用于輸入機械轉矩,電動機負載由常數模塊TL設定,輸出端m用于連接電機測量單元Machines Demux,輸出電機的參數。電機運行在速度模式,通過先進的矢量控制實現高精確的速度控制。矢量控制通過速度給定計算得到力矩給定,經過相關坐標轉換運算獲取控制逆變器的開關信號plues控制逆變器晶閘管的通斷,從而使直流電變成頻率可調的交流電,控制電機的運行。在實際盾構中,電機驅動中采用的變頻器為無速度矢量變頻器,但模型仿真中要依靠電機檢測信號反饋形成閉環回路,因而采用的是帶速度反饋的矢量控制,試驗中變頻器仿真模塊為了簡單省去了整流環節,直接利用了直流電源,通過逆變器來實現電壓的調整。單電機模糊PID控制的仿真模型如圖6所示。
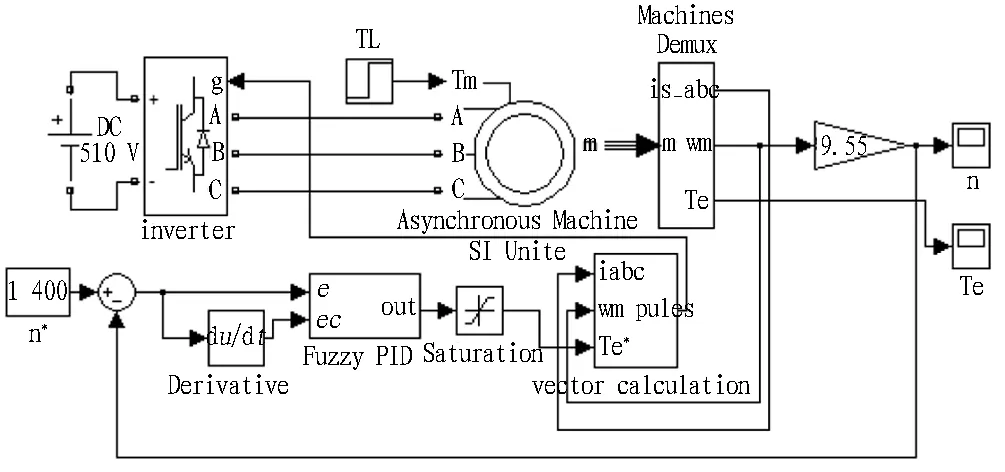
圖6 單電機模糊PID控制仿真模型
以下實驗的電機都運行在速度控制模式,根據實際盾構中驅動電機的運行狀況,為了簡化實驗,仿真中電機的速度都設定在1 400 r/min,通過控制器來控制電機的速度達到設定值。
本文首先對單電機利用模糊PID控制和PI控制算法在啟動和負載突變狀況下的響應進行仿真對比,然后把模糊PID控制與并行同步控制結合起來利用4臺電機對多電機的同步性進行仿真,證明所設計的控制方法的實用性。
4.1 單電機啟動對比
在電機啟動時加一定的負載,模糊PID控制電機的啟動過程如圖7所示。在剛啟動階段有短時間的反向速度,這是仿真時的力矩補償造成的,但總體來看速度響應非常迅速,在0.4 s左右可達到設定值。PI啟動如圖8所示,其響應時間要比模糊PID控制的時間長,0.45 s達到設定值,但由于存在著超調和波動,完全跟蹤需要1 s左右。
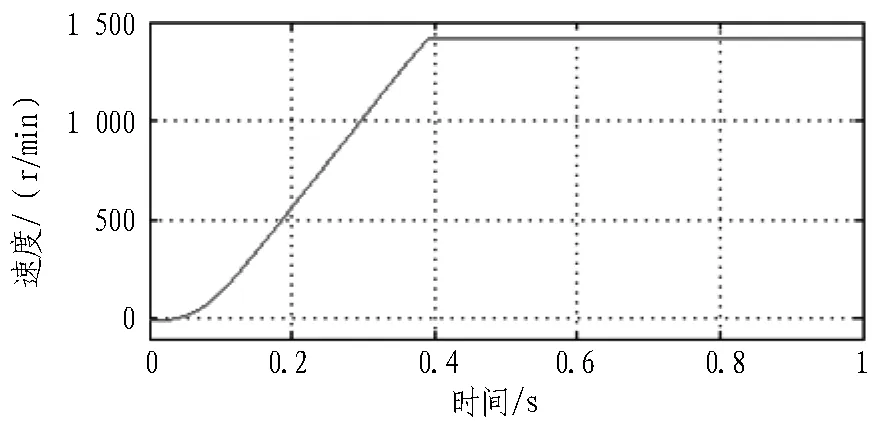
圖7 模糊PID控制的速度響應曲線
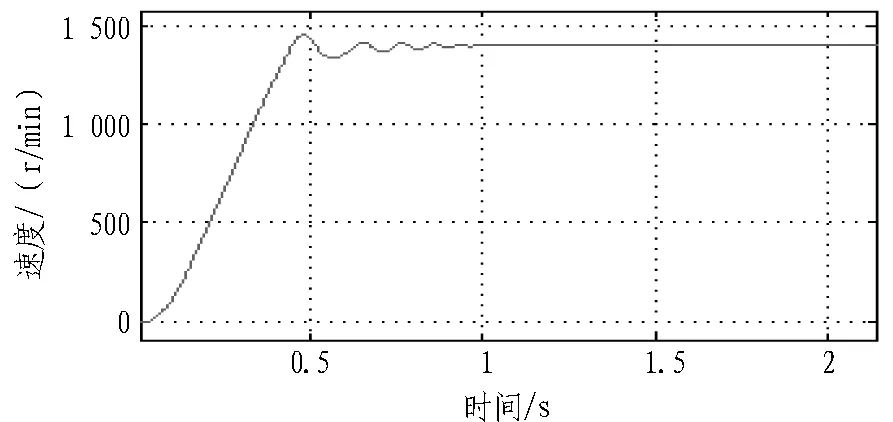
圖8 PI控制的速度響應曲線
4.2 單電機載荷擾動對比
盾構在掘進中,由于地層不均勻會導致電機所承擔的負載突變,通過改變電機所加的負載大小來進行模擬,載荷變化率為100%。模糊PID在1 s時使負載突變,速度的波動如圖9所示,波動范圍為10 r/min,并且能夠很快恢復到設定速度;PI控制的仿真在2 s時使負載突變,出現的波動如圖10所示,波動程度比模糊PID控制劇烈,波動時間也較長。
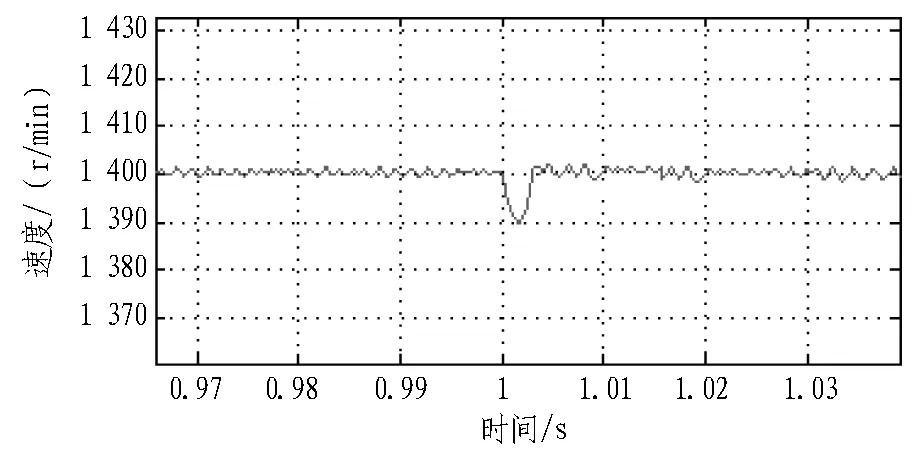
圖9 負載突變狀況下模糊PID控制的響應曲線Fig.9 Curve of speed response of PID control under load mutation condition

圖10 負載突變狀況下PI控制的響應曲線Fig.10 Curve of speed response of PI control under load mutation condition
4.3 多電機啟動
多電機的模糊PID控制的仿真,利用4個如圖6所示的單電機模型通過并行同步控制組合在一起,速度同一給定,觀察4臺電機的轉速變化情況。首先對4臺電機的啟動階段進行仿真,在啟動過程中,由于土層的不均勻等原因,每個電機承擔的負載可能會有所不同,所以在仿真時給電機加上不同的負載進行模擬。另外,實際中電機的參數會有些差異,在仿真時通過調整電機的定子、轉子的電阻、電感值來使電機性能略有不同。啟動階段4臺電機的速度響應如圖11所示,4臺電機的速度響應很快,其速度也基本相同。圖12為局部放大圖,電機1所施加的負載相對較小,依次類推,電機4施加的負載最大,因此其啟動速度略有不同。
4.4 多電機載荷擾動
對于盾構掘進過程中負載的不確定性,在1 s時使負載突變,載荷變化率為100%,由圖13顯示4臺電機的速度均發生微小的反彈現象,但很快穩定在1 400 r/min左右,可以看出模糊PID控制具有較強的魯棒性,對于負載的突變具有較強的抑制作用。
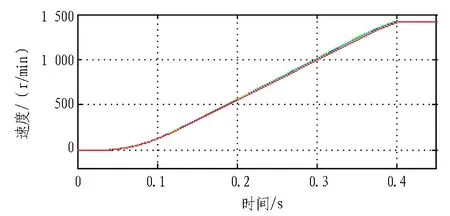
圖11 多電機啟動速度響應Fig.11 Curve of speed response under multi-motors starting condition
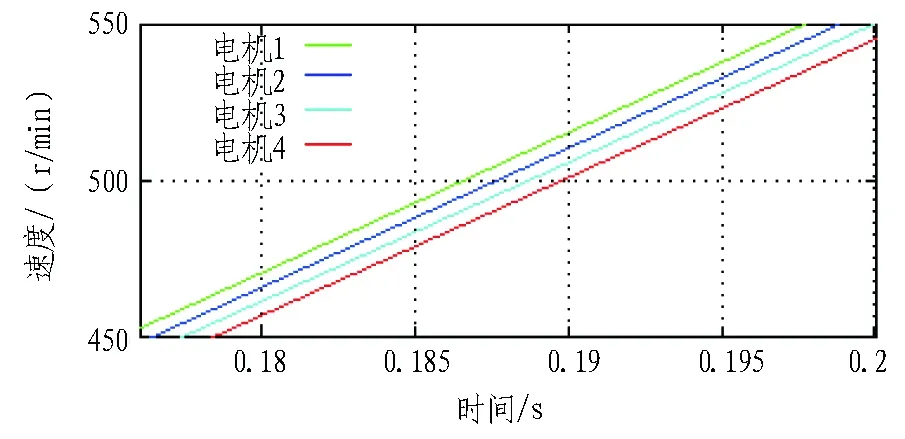
圖12 局部速度響應曲線
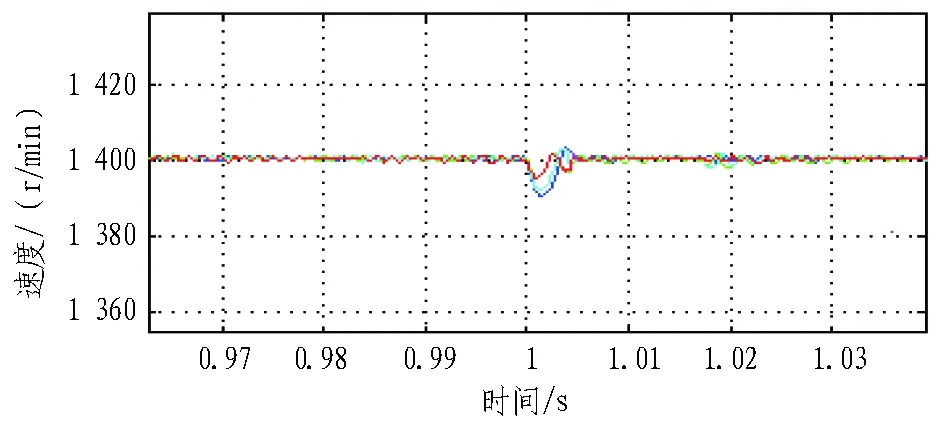
圖13 負載突變時4臺電機的速度響應Fig.13 Speed response of 4 motors under load mutation condition
4.5 仿真結果分析
從單電機的仿真可以看出模糊PID控制在啟動中響應速度比PI控制稍快一點,最重要的是沒有超調,而PI控制出現超調,且波動時間很長。在負載突變仿真中,負載的變化對模糊PID控制的影響較小,只有一個波動就可穩定在給定速度,而PI控制振蕩比較明顯。所以模糊PID控制的性能要好一些。
在多電機的仿真中,模糊PID控制與并行同步控制方式相結合,可以看出隨著電機數量的增加,這種控制方法對電機的性能沒有太大影響,啟動的響應時間和單電機基本一致,在遇到負載突變狀況時,電機的速度發生變化后,經過短時間調整,很快恢復到設定值,幾臺電機之間的速度同步誤差比較小。只要電機的速度一致則它們所承擔的負載就是相同的,可以有效避免個別電機過載所造成的故障。綜上所述,本文所設計的控制策略對于外界的擾動具有較強的抑制能力,同步性能大幅度提高,順應載荷波動的能力增強。
5 結論與討論
本文針對盾構控制電機數量多、結構復雜,刀盤電機同步性能難以保障的特點,對盾構的控制系統進行分析研究。首先研究了主從控制、并行同步控制和幾種耦合控制在盾構驅動電機控制應用的特點,得出了在盾構控制中采用并行同步控制的合理性。然后設計了一種基于模糊PID智能盾構控制算法,并將該算法和并行同步控制進行結合。最后通過實驗仿真將該方法與常用的PI控制方法對比,發現該方法可以有效提高多電機的響應速度,減少同步誤差,效果明顯,并且其控制的同步性能和抗負載擾動的性能更佳。本文研究的控制策略在實驗研究階段取得了良好的效果,在后續研究中可以考慮利用在盾構施工控制中,這對保障盾構施工的安全及準確控制具有重要的意義。
[1]史步海,李偉青.盾構機刀盤驅動系統同步控制技術的研究[J].計算機測量與控制,2012,20(5): 1258-1260.(SHI Buhai,LI Weiqing.Research on synchronous control of tunnel boring machine’s cutter head driving system[J].Computer Measurement & Control,2012,20(5): 1258-1260.(in Chinese))
[2]Ran LIU,Weidong LI,Jianzhong SUN,et al.Load sharing performance of the main drive system in the shield machine and improvement of control method[J].Journal of Mechanics Engineering and Automation,2012,2(9): 10-15.
[3]張承慧,石慶升,程金.一種基于相鄰耦合誤差的多電機同步控制策略[J].中國電機工程學報,2007,27(15): 59-63.(ZHANG Chenghui,SHI Qingsheng,CHENG Jin.
Synchronization control strategy in multi-motor systems based on the adjacent coupling error[J].Proceedings of the CSEE,2007,27(15): 59-63.(in Chinese))
[4]Xiao Y,Zhu K Y.Optimal synchronization control of high-precision motion systems[J].Industrial Electronics,IEEE Transactions,2006(4): 1160-1169.
[5]羅亞琴.盾構機刀盤系統的同步驅動研究[D],大連:大連理工大學機械工程學院,2011.(LUO Yaqin.Study on synchronization driving of cutter head of shield machine[D].Dalian: School of Mechanical Engineering,Dalian University of Technology,2011.(in Chinese))
[6]趙剛,劉德全.盾構機刀盤多電機同步驅動研究[J].廣東造船,2012(6): 73-77.(ZHAO Gang,LIU Dequan.Synchronously research of the shield machine cutter drive[J].Guangdong Shipbuilding,2012(6): 73-77.(in Chinese))
[7]連繼軍.基于模糊PID控制的多電機同步控制系統的分析與設計[J].煤礦機械,2014,35(3): 210-212.(LIAN Jijun.Analysis and design of multi-motor synchronous control system based on fuzzy PID control[J].Coal Mine Machinery,2014,35(3): 210-212.(in Chinese))
[8]Skoczowski S,Doraek S,Pietrusewicz K.Robust PID model following control[J].Control and Intelligent Systems,2006(3): 186-193.
[9]崔皆凡,邢豐,趙楠,等.基于模糊控制器的改進耦合多電機同步控制[J].微電機,2011(3): 75-77.(CUI Jiefan,XING Feng,ZHAO Nan,et al.The improved coupling multi-motor synchronous control based on fuzzy controller[J].Micromotors,2011(3): 75-77.(in Chinese))
[10]Jones M,Levi E,Iqbal A.Vector control of a five-phase series-connected two-motor drive using synchronous current controllers[J].Electric Power Components and Systems,2005,33(4): 411-430.
廣告目次
中鐵隧道集團有限公司承建的渝黔鐵路天坪隧道 封面
常州金土木工程儀器有限公司 封二
西安交大流體壓縮國家工程中心咸陽風機廠 插一
中鐵巖鋒成都科技有限公司 插二
羅賓斯(上海)地下工程設備有限公司 后插二
《隧道建設》 后插一
《隧道建設》 封三
阿特拉斯·科普柯(上海)貿易有限公司 封底
StudyonSynchronousControlTechnologiesforCutterHeadDrivingMotorsofShield
REN Yingying1,2,ZHOU Jianjun1,2,WANG Zhufeng1,2,ZHANG Hepei1,2,LI Hongbo1,2
(1.StateKeyLaboratoryofShieldMachineandBoringTechnology,Zhenzhou450001,Henan,China; 2.ChinaRailwayTunnelGroupCo.,Ltd.,Luoyang471009,Henan,China)
The synchronous performance of the cutter head driving motors of shield is the key to the normal operation of the cutter head drive system of shield.In this paper,the advantages and disadvantages of master-slave control,parallel synchronous control and coupling control of driving motors of shield are analyzed,and the rationality of parallel synchronous control is demonstrated.A multi-motor synchronous control method based on fuzzy PID controller and parallel synchronous control structure is proposed and simulated by means of Matlab/simulink module,and comparison and contrast is made between the mentioned control method and PI control.The study shows that the mentioned control method is superior to PI control in terms of dynamic response,real-time performance and robustness,and it can achieve better synchronous working of the motors at the set speed.
shield; cutter head drive; multi-motor; parallel synchronous control; fuzzy PID control
2014-07-11;
2014-08-20
國家863計劃項目(2012AA041802);國家國際科技合作專項(2011DFB71550);中鐵隧道集團重大課題(隧研合2013-10)
任穎瑩(1985—),女,河南南陽人,2013年畢業于鄭州大學,控制理論與控制工程專業,碩士,助理工程師,現主要從事盾構及掘進技術研究工作。
10.3973/j.issn.1672-741X.2014.12.013
U 455.3+9
A
1672-741X(2014)12-1196-06
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
防爆電機(2020年3期)2020-11-06 09:07:42
山東冶金(2019年3期)2019-07-10 00:54:04
測控技術(2018年5期)2018-12-09 09:04:50
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2017年7期)2017-06-05 09:36:13
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
電測與儀表(2014年17期)2014-04-04 11:56:50
自動化博覽(2014年12期)2014-02-28 22:34:39