一種改進(jìn)的無線傳感器網(wǎng)絡(luò)DV-Hop定位算法在煤礦井下漏電事故中的應(yīng)用*
2014-09-07 10:24:26彭繼慎楊慕紫
傳感技術(shù)學(xué)報(bào) 2014年10期
彭繼慎,楊慕紫,馬 冰
(遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院,遼寧 葫蘆島 125105)
?
一種改進(jìn)的無線傳感器網(wǎng)絡(luò)DV-Hop定位算法在煤礦井下漏電事故中的應(yīng)用*
彭繼慎*,楊慕紫,馬 冰
(遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院,遼寧 葫蘆島 125105)
煤礦井下輸電線路的實(shí)時(shí)監(jiān)測(cè)中,漏電故障定位是供電系統(tǒng)保護(hù)的重要研究課題。針對(duì)井下無線傳感器網(wǎng)絡(luò)定位算法存在不準(zhǔn)確的問題,提出了一種改進(jìn)DV-Hop節(jié)點(diǎn)定位算法。首先通過計(jì)算錨節(jié)點(diǎn)組成的三角形面積,排除面積極小的錨節(jié)點(diǎn)組,避免錨節(jié)點(diǎn)近似共線的情況,完成了錨節(jié)點(diǎn)的優(yōu)選方案;此外在粒子群算法的基礎(chǔ)上結(jié)合遺傳算法和混沌理論,提出了一種遺傳混沌粒子群優(yōu)化算法;最后利用改進(jìn)的粒子群算法對(duì)DV-Hop算法定位得到的節(jié)點(diǎn)位置進(jìn)行校正。經(jīng)過仿真實(shí)驗(yàn)表明在相同的網(wǎng)絡(luò)環(huán)境下,與傳統(tǒng)DV-Hop算法相比,改進(jìn)算法能夠更有效地提高定位精度,從而更加準(zhǔn)確地監(jiān)測(cè)到煤礦井下漏電事故位置。
無線傳感器網(wǎng)絡(luò);故障定位;DV-Hop算法;混沌;遺傳算法;粒子群優(yōu)化算法
煤礦井下的供電系統(tǒng)是工業(yè)生產(chǎn)順利進(jìn)行的重要保障。由于礦井環(huán)境十分惡劣,配電網(wǎng)發(fā)生漏電故障時(shí),可能發(fā)生瓦斯泄漏等安全隱患,這將對(duì)井下人員的人身安全造成重大威脅。因此,針對(duì)井下配電網(wǎng)故障定位方法的研究具有重要意義[1-2]。
隨著無線通信技術(shù)的蓬勃發(fā)展,孕育出的無線傳感器網(wǎng)絡(luò)(WSN)在礦井中得到了越來越多的應(yīng)用。其中DV-Hop[3-4]作為一種無需測(cè)距定位算法,非常適用于煤礦井下WSN節(jié)點(diǎn)定位中。為了降低定位誤差和提高定位精度,已有許多優(yōu)化算法對(duì)其進(jìn)行改進(jìn)[5-9]。文獻(xiàn)[5]將蟻群粒子群算法引入到DV-Hop算法的未知節(jié)點(diǎn)計(jì)算階段,提高了定位精度。文獻(xiàn)[6]使用多邊測(cè)量法的夾角比較原則,除去了錨節(jié)點(diǎn)共線的問題。文獻(xiàn)[7]引入蛙跳算法求解每跳距離的平均值,從而降低了節(jié)點(diǎn)定位誤差,使其更接近實(shí)際值。這些算法在一定程度上對(duì)DV-Hop算法的性能起到了優(yōu)化作用,但仍有不足。本文在DV-Hop定位算法的基礎(chǔ)上,提出了一種錨節(jié)點(diǎn)優(yōu)選方法,避免了節(jié)點(diǎn)無法定位的問題,同時(shí)提出了一種基于遺傳混沌粒子群算法的DV-Hop改進(jìn)方案,以降低井下配電網(wǎng)故障的平均定位誤差和提高定位精度。
1 DV-Hop算法的分析與改進(jìn)
1.1 DV-Hop算法
DV-Hop算法定位過程如下:
第1步 錨節(jié)點(diǎn)將自身的信息(ID、坐標(biāo)、錨接收信息節(jié)點(diǎn)的跳數(shù))通過泛洪的方式發(fā)送出去,跳數(shù)初始值設(shè)置為0,每個(gè)臨界點(diǎn)接收到信息后就保存和更新最小跳數(shù),并將跳數(shù)加1,并繼續(xù)向鄰節(jié)點(diǎn)轉(zhuǎn)發(fā),以此規(guī)則獲得未知節(jié)點(diǎn)距離每個(gè)錨節(jié)點(diǎn)的最小跳數(shù)值。
第2步 獲取其他錨節(jié)點(diǎn)的跳數(shù)并根據(jù)公式
(1)計(jì)算出錨節(jié)點(diǎn)每跳的平均每跳距離值disa。

(1)
式中:(xi,yi)、(xj,yj)分別為錨節(jié)點(diǎn)i、j的坐標(biāo);hcij為錨節(jié)點(diǎn)i、j之間最小的跳數(shù)。
第3步 利用三邊測(cè)量法,如圖1所示,通過式(2)計(jì)算出未知節(jié)點(diǎn)A0與錨節(jié)點(diǎn)A1、A2、A3之間的距離。
(2)

圖1 三邊測(cè)量法示意圖
將式(2)轉(zhuǎn)化為公式AX=P的形式,則有:
(3)
(4)

(5)
采用最小二乘估計(jì)得出:
X=(ATA)-1ATP
(6)
1.2 DV-HOP算法的不足
(1)錨節(jié)點(diǎn)的拓?fù)潢P(guān)系會(huì)直接影響無線傳感器節(jié)點(diǎn)定位精度。圖2為煤礦井下電網(wǎng)無線傳感器節(jié)點(diǎn)的分布[10]。由于煤礦井下地理環(huán)境狹長(zhǎng),配電網(wǎng)中的傳感器在安裝時(shí)無法達(dá)到均勻布置的要求,此時(shí)會(huì)產(chǎn)生傳感器節(jié)點(diǎn)共線或近似共線的情況,這兩種情況都無法實(shí)現(xiàn)節(jié)點(diǎn)定位。因此,去除共線性和選擇適合的錨節(jié)點(diǎn)的成為了一個(gè)關(guān)鍵問題。
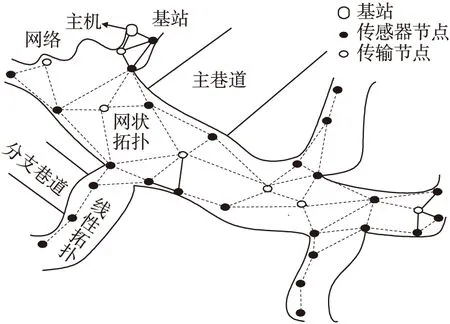
圖2 煤礦井下電網(wǎng)無線傳感器分布圖
(2)DV-Hop算法在節(jié)點(diǎn)定位過程中,由于環(huán)境和通信的影響,平均跳距往往會(huì)和實(shí)際值產(chǎn)生一定誤差。且誤差一旦產(chǎn)生便會(huì)累積影響后面的計(jì)算,最終導(dǎo)致產(chǎn)生更大的計(jì)算失誤。所以必須通過對(duì)未知節(jié)點(diǎn)坐標(biāo)進(jìn)行校正來降低計(jì)算誤差。
2 DV-Hop算法的改進(jìn)
2.1 錨節(jié)點(diǎn)優(yōu)選方案
本文通過計(jì)算錨節(jié)點(diǎn)組成三角形的面積Sn來判定錨節(jié)點(diǎn)是否共線:
(7)
假設(shè)(xi,yi),(xj,yj),(xk,yk)為隨機(jī)分布任意的3個(gè)錨節(jié)點(diǎn)坐標(biāo),Sn為錨節(jié)點(diǎn)組成的三角形面積。如果0≤Sn≤δ則認(rèn)為這3個(gè)錨節(jié)點(diǎn)在近似的一條直線上,所以需要另選錨節(jié)點(diǎn)來輔助定位。
2.2 粒子群優(yōu)化算法DV-Hop
粒子群優(yōu)化算法PSO(Particle Swarm Optimization)因具有優(yōu)異的全局搜索性能和快速收斂能力在處理優(yōu)化問題時(shí)表現(xiàn)出獨(dú)特的優(yōu)勢(shì)[11]。PSO從隨機(jī)解出發(fā),對(duì)于n維的優(yōu)化問題,隨機(jī)生成m個(gè)粒子的初始種群,將第i個(gè)粒子的飛行速度Vi和位置Xi其代入優(yōu)化目標(biāo)函數(shù)得出適應(yīng)值。經(jīng)過更新Vi和位置Xi和迭代后搜索到最優(yōu)解。將第i個(gè)粒子搜索得到的最優(yōu)解記為pi,粒子群搜索到目前最優(yōu)記為Pb,利用式(8)和式(9)更新Vi和Xi。
Xin(k+1)=Xin(k)+Vin(k+1)
(8)
Vin(k+1)=ωVin(k)+c1r1(Pin-Xin(k))+
c2r2(Pbn-Xin(k))
(9)
式中c1、c2為收縮因子,ω為慣性權(quán)重。
2.3 遺傳混沌粒子群算法
本文在粒子群算法的基礎(chǔ)上結(jié)合遺傳算法并引入混沌原理和動(dòng)態(tài)權(quán)重自適應(yīng)調(diào)節(jié)方法,提出了一種遺傳混沌粒子群算法GCPSO(Genetic Chaos Particle Swarm Optimization)。
2.3.1 遺傳算法
遺傳算法GA(Genetic Algorithm)是一種模擬自然界生物不斷進(jìn)化的發(fā)展規(guī)律[12]。本文通過PSO算法中引入GA算法的交叉、變異兩種基因操作形成新一代的精英,最終得到優(yōu)化問題的最優(yōu)解。
(1)選擇交叉
選出N個(gè)偶數(shù)個(gè)體,然后對(duì)選出的個(gè)體兩兩配對(duì),執(zhí)行交叉操作,產(chǎn)生后代粒子。假設(shè)粒子a與粒子b被選擇來做交叉操作,相應(yīng)的位置Xa(t)與Xb(t)被下面的后代取代:
(10)
(11)
對(duì)應(yīng)的速度:
(12)
(13)
(2)變異操作
以概率P對(duì)粒子進(jìn)行交叉操作后,執(zhí)行下面變異操作:
(14)
(15)

2.3.2 自適應(yīng)參數(shù)調(diào)節(jié)
混沌(Chaos)是一種對(duì)初始條件非常敏感且可以遍歷所有狀態(tài)的非線性的運(yùn)動(dòng)[13]。本文采用混沌原理,通過自適應(yīng)調(diào)節(jié)粒子群算法的參數(shù)來優(yōu)化粒子的速度Vi和位置Xi。按照下式產(chǎn)生混沌序列:
βk+1=λβk(1-βk)
(16)
當(dāng)λ=4時(shí)系統(tǒng)將進(jìn)入混沌狀態(tài),此時(shí)混沌變量βt(t=1,2,…)將在系統(tǒng)內(nèi)不重復(fù)地遍歷所有狀態(tài)。之后對(duì)r1和r2進(jìn)行動(dòng)態(tài)調(diào)整,產(chǎn)生一個(gè)優(yōu)良群體,再通過式(8)、式(9)引領(lǐng)粒子向最優(yōu)解聚集。混沌優(yōu)化如下:
(17)
慣性權(quán)重ω在尋優(yōu)中起著保持算法平衡的作用。本文選用動(dòng)態(tài)權(quán)重調(diào)節(jié)的方法,權(quán)重更新公式為:
(18)
式中:ωmax、ωmin為慣性權(quán)重上下限;k為當(dāng)前迭代次數(shù);kmax為迭代次數(shù)最大值。
2.4 基于遺傳混沌粒子群DV-Hop改進(jìn)
基于遺傳混沌粒子群算法的DV-Hop算法(GCPSO-Hop)和DV-Hop算法兩者通信能耗相同,但GCPSO-Hop算法在計(jì)算能耗方面略大于DV-Hop算法。由于無線傳感器網(wǎng)絡(luò)能耗主要產(chǎn)生于通信能耗,所以GCPSO-Hop定位算法能耗符合應(yīng)用條件。本文將定位誤差fi最小作為優(yōu)化的目標(biāo):
(19)
其中:(x,y)為未知節(jié)點(diǎn)的坐標(biāo),(xi,yi)為錨節(jié)點(diǎn)的坐標(biāo),dk為實(shí)際的測(cè)量距離。適應(yīng)度函數(shù)為:
(20)
其中:αi為未知節(jié)點(diǎn)與錨節(jié)點(diǎn)i跳數(shù)的反比值;n為未知節(jié)點(diǎn)的數(shù)量。
本文利用GCPSO算法對(duì)DV-Hop算法定位后期部分中求出的未知節(jié)點(diǎn)坐標(biāo)進(jìn)行校正。優(yōu)化具體步驟如下:
Step 1 通過DV-Hop算法的第1步和第2步,得出平均跳距disa和最小跳數(shù)hcij。
Step 2 初始化粒子群。初始化粒子速度Vi和位置Xi,設(shè)置迭代次數(shù)k=0。
Step 3 根據(jù)式(20)計(jì)算適應(yīng)值fitness。
Step 4 比較各個(gè)粒子的適應(yīng)值。并設(shè)置群體中個(gè)體最優(yōu)解為Pi,全局最優(yōu)解為Pb。
Step 5 根據(jù)式(8)、式(9)更新粒子i的位置Xi和速度Vi。
Step 6 判斷算法是否終止。若達(dá)到最大迭代次數(shù)則輸出最優(yōu)解,否則進(jìn)行Step 7。
Step 7 按適應(yīng)度值隨機(jī)選出M個(gè)個(gè)體,對(duì)它們執(zhí)行交叉操作,得到M個(gè)新個(gè)體。
Ste0p 8 對(duì)所有個(gè)體執(zhí)行變異操作,在M+N中選取適應(yīng)度高的N個(gè)體開始進(jìn)入下一代,返回Step 3。
3 實(shí)驗(yàn)仿真與結(jié)果分析
為了驗(yàn)證改進(jìn)算法的有效性,本文在100 m×100 m的仿真區(qū)域內(nèi)隨機(jī)產(chǎn)生傳感器節(jié)點(diǎn)。對(duì)GCPSO-Hop算法、DV-Hop算法、GA-Hop和PSO-Hop算法利用MATLAB進(jìn)行仿真實(shí)驗(yàn),并對(duì)結(jié)果進(jìn)行對(duì)比分析。其中絕對(duì)定位誤差為:

(21)
相對(duì)定義誤差為:
(22)
式中:(x,y)為未知節(jié)點(diǎn)實(shí)際坐標(biāo),(xe,ye)為估計(jì)坐標(biāo),R為通信半徑。
設(shè)置c1=c2=2.0,ωmax=0.9,ωmin=0.4,遺傳交叉概率P=0.85,每一代種群的規(guī)模N=40,迭代次數(shù)k=200。
由于煤礦井下巷道狹小細(xì)長(zhǎng)且開闊空間有限。為了減少節(jié)點(diǎn)通信的誤差,在部署巷道拐彎處節(jié)點(diǎn)時(shí)采用減小部署鋪節(jié)點(diǎn)間距離的方法并增加一個(gè)冗余節(jié)點(diǎn)以保證節(jié)點(diǎn)間的通信。并且在寬度較窄的巷道采用較為密集的單鏈?zhǔn)讲渴鸱绞?以保證節(jié)點(diǎn)間的通信質(zhì)量[14]。
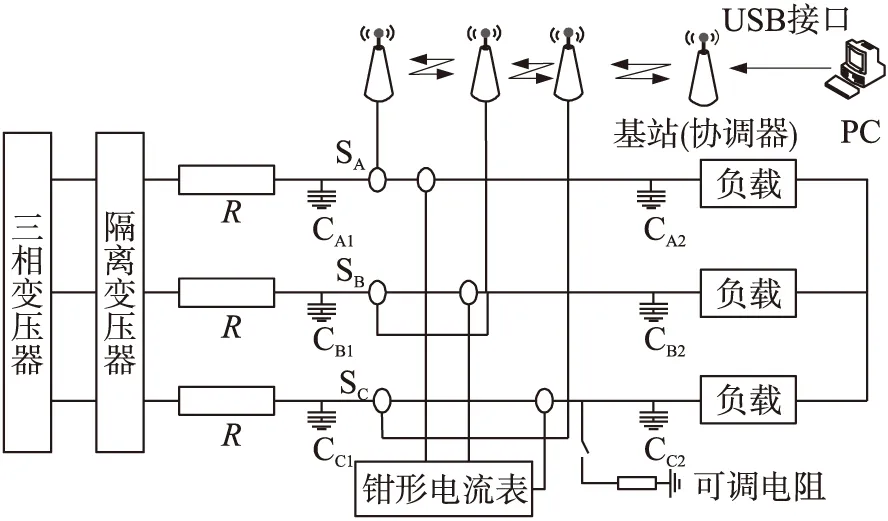
圖3 實(shí)驗(yàn)平臺(tái)結(jié)構(gòu)示意圖
為了測(cè)試本文算法的性能,搭建了模擬井下ZigBee無線傳感器配電網(wǎng)監(jiān)測(cè)實(shí)驗(yàn)平臺(tái)。實(shí)驗(yàn)平臺(tái)示意圖如圖3所示。電源為三相電流源,單相輸出電流為1 A~100 A,隔離變壓器變比為1∶1,R為保護(hù)電阻,A、B、C為三相接上電流傳感器。當(dāng)電網(wǎng)中的電路一旦發(fā)生接地故障,此時(shí)三相線路失去平衡便會(huì)出現(xiàn)零序分量。經(jīng)過信號(hào)調(diào)節(jié)電路之后會(huì)輸出為0~3.3 V電壓信號(hào),再經(jīng)A/D轉(zhuǎn)換器在轉(zhuǎn)化為數(shù)字信號(hào),最終利于ZigBee無線技術(shù)傳送到終端。表1為實(shí)測(cè)定位線路的零序電流。

表1 無線傳感器網(wǎng)絡(luò)實(shí)測(cè)的輸電線路零序電流誤差

圖5 排除近似共線前后定位平均誤差比較
圖4是節(jié)點(diǎn)的隨機(jī)分布圖。星號(hào)為未知節(jié)點(diǎn),十字符號(hào)為錨節(jié)點(diǎn)。此時(shí)錨節(jié)點(diǎn)出現(xiàn)了與煤礦井下近似共線的情況。圖5為未檢測(cè)共線性和排除共線性的定位效果,如圖5(a)和圖5(b)所示,采用剔除共線的方案之后定位效果更優(yōu),可以有效地減小節(jié)點(diǎn)的平均定位誤差。

圖4 節(jié)點(diǎn)的隨機(jī)分布
圖6為節(jié)點(diǎn)總數(shù)相同的情況下,錨節(jié)點(diǎn)比例在(5%~35%)之間,平均定位誤差變化曲線。從圖中可以看出4種定位算法的平均定位誤差都隨著錨節(jié)點(diǎn)比例增大而不斷減小,其中GCPSO-Hop算法的定位性能表現(xiàn)出明顯的優(yōu)勢(shì)。在錨節(jié)點(diǎn)比例為35%時(shí),GCPSO-Hop算法的平均定位誤差最小,且較DV-Hop降低了11.16%。表明GCPSO-Hop算法可以更有效地提高節(jié)點(diǎn)定位精度和降低定位誤差。
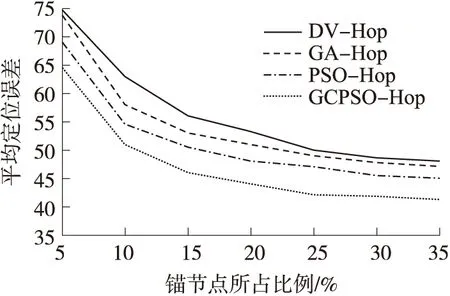
圖6 平均定位誤差隨錨節(jié)點(diǎn)所占比例變化關(guān)系
圖7是錨節(jié)點(diǎn)比例相同的情況下,平均定位誤差隨節(jié)點(diǎn)數(shù)量變化的關(guān)系。隨著節(jié)點(diǎn)數(shù)量的增加,平均定位誤差都出現(xiàn)了遞減趨勢(shì),并逐漸趨于平穩(wěn)。GA-Hop算法和PSO-Hop算法的平均定位誤差都小于DV-Hop算法平均定位誤差,但沒有達(dá)到優(yōu)化。由于GCPSO-Hop算法對(duì)定位得到的位置校正更精確,所以平均定位誤差更小。

圖7 平均定位誤差隨節(jié)點(diǎn)數(shù)量的變化關(guān)系

圖8 平均定位誤差隨節(jié)點(diǎn)通信半徑關(guān)系
為了更全面的分析GAPSO-Hop算法的性能。圖8為錨節(jié)點(diǎn)比例為20%的情況下,在不同的通信半徑下節(jié)點(diǎn)的平均定位誤差變化曲線。通過仿真結(jié)果可以看出,當(dāng)R較小時(shí)隨著通信半徑的增加,平均定位誤差開始變小。如R=10 m時(shí),GCPSO-Hop算法的節(jié)點(diǎn)的平均定位誤差較DV-Hop算法的平均定位誤差降低了23.8%。當(dāng)R大于35 m時(shí),雖然隨著通信半徑的增大,網(wǎng)絡(luò)的連通度變大會(huì)引起定位誤差增加。但此時(shí)GAPSO-Hop算法仍是所有算法中最優(yōu)的。
為了驗(yàn)證GCPSO-Hop算法的有效性和準(zhǔn)確性,在煤礦井下選取6個(gè)定位節(jié)點(diǎn)進(jìn)行驗(yàn)證實(shí)驗(yàn),實(shí)驗(yàn)數(shù)據(jù)見表2。表2中節(jié)點(diǎn)實(shí)際坐標(biāo)為(x,y),實(shí)測(cè)坐標(biāo)為(xe,ye)。通過實(shí)際測(cè)量結(jié)果可以看出本文提出GCPSO-Hop算法較其他算法更接近實(shí)際值,因此定位誤差更小,精度更高。
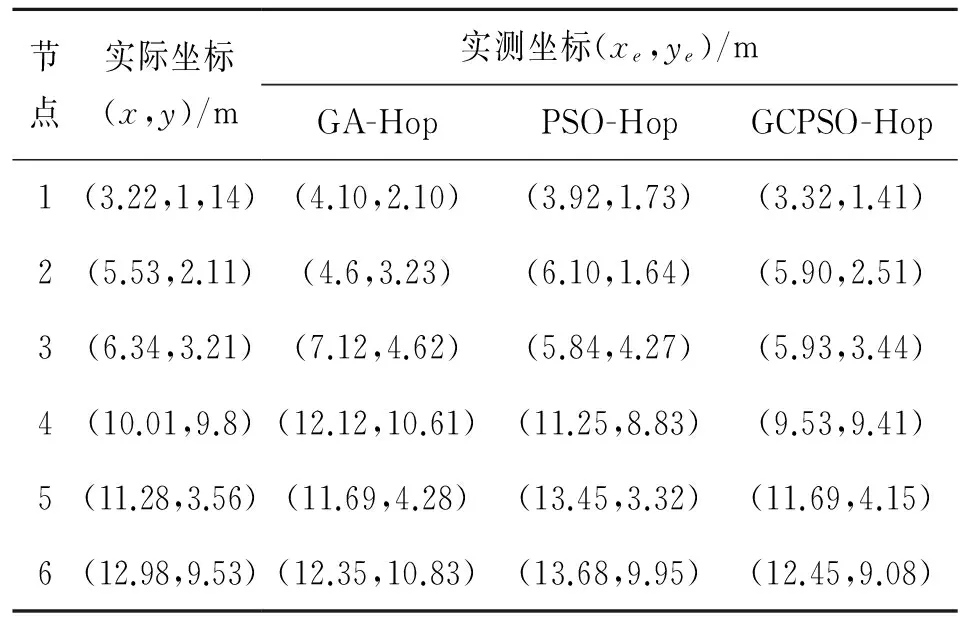
表2 實(shí)際測(cè)量結(jié)果
4 結(jié)論
針對(duì)煤礦井下漏電事故排查存在定位不準(zhǔn)確的問題,本文提出了一種改進(jìn)DV-Hop算法。首先通過錨節(jié)點(diǎn)優(yōu)選方案,避免了錨節(jié)點(diǎn)組合存在共線而無法定位的的缺陷。同時(shí)在粒子群優(yōu)化算法的基礎(chǔ)上,加入了遺傳交叉技術(shù)和混沌自適應(yīng)調(diào)節(jié)方法提出了一種遺傳混沌粒子群優(yōu)化算法(GCPSO)對(duì)DV-Hop的估計(jì)位置進(jìn)行校正。實(shí)驗(yàn)仿真表明,GCPSO-Hop算法較DV-Hop算法在降低平均定位誤差和提高定位精度方面具有更佳的優(yōu)化效果,證明了GCPSO-Hop算法在煤礦井下安全監(jiān)督過程中具有可行性與有效性。
[1] 富眾杰,申毅,趙剛. 一種改進(jìn)的煤礦井下無線傳感器網(wǎng)絡(luò)定位算法[J]. 計(jì)算機(jī)仿真,2012,29(8):123-126.
[2]湛浩旻,孫長(zhǎng)嵩,吳珊,等. ZigBee技術(shù)在煤礦井下救援系統(tǒng)中的應(yīng)用[J]. 計(jì)算機(jī)工程與應(yīng)用,2008(24):181-183.
[3]Debessu Y G,Wu H C. Modified Turbo Decoder for Location in Single-Frequency Networks[C]//IEEE International Symposium on BMSB,2012:1-5.
[4]石為人,賈傳江,梁煥煥. 種改進(jìn)的無線傳感器網(wǎng)絡(luò)DV-Hop定位算法[J]傳感技術(shù)學(xué)報(bào),2011,24(1):83-87.
[5]葉蓉,趙靈鍇. 基于蟻群粒子群混合的無線傳感器網(wǎng)絡(luò)定位算法[J]. 計(jì)算機(jī)測(cè)量與控制,2011,19(3):732-735.
[6]李亞紅,馮東華. 基于物聯(lián)網(wǎng)的傳感器節(jié)點(diǎn)易移動(dòng)型監(jiān)測(cè)區(qū)域定位算法[J]. 計(jì)算機(jī)測(cè)量與控制,2012,20(11):2916-2918.
[7]葛宇,王學(xué)平,梁靜. 基于蛙跳算法的DV-Hop定位改進(jìn)[J]. 計(jì)算機(jī)應(yīng)用,2011,31(4):922-925.
[8]Yi T T,Fang Z Y,Li R X. RMADV-HOP:An Improved DV-HOP Localization Algorithm[C]//Proceedings of the 2010 Seventh International Conference on Information Technology:New Generation,Las Vegas,Nevada,2010:939-943.
[9]江禹生,馮硯毫. 一種新的DV-Hop定位算法[J]. 傳感技術(shù)學(xué)報(bào),2010,23(12):1815-1819.
[10]王超楠,丁恩杰,周強(qiáng),等. 應(yīng)用無線傳感器網(wǎng)絡(luò)快速定位礦井配電網(wǎng)故障的方法[J]. 計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)學(xué)報(bào),2007,19(3):392-397.
[11]陳星舟,廖明宏,林建華. 基于粒子群優(yōu)化的無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位改進(jìn)[J]. 計(jì)算機(jī)應(yīng)用,2010,30(7):1736-1738.
[12]方旺盛,曾晶. 基于量子遺傳算法的非測(cè)距節(jié)點(diǎn)定位算法研究[J]. 計(jì)算機(jī)應(yīng)用與軟件,2013,30(2):180-183.
[13]孫子文,王鑫雨,白勇,等. 基于信度和早熟檢驗(yàn)的混沌粒子群優(yōu)化定位算法[J]. 傳感器與微系統(tǒng),2013,32(9):129-133.
[14]喬鋼柱,曾建潮. 信標(biāo)節(jié)點(diǎn)鏈?zhǔn)讲渴鸬木聼o線傳感器網(wǎng)絡(luò)定位算法[J]. 煤炭學(xué)報(bào),2010,35(7):1229-1233.

彭繼慎(1969-),男,遼寧阜新人,教授,博士生導(dǎo)師,博士。主要從事煤礦安全生產(chǎn)過程監(jiān)測(cè)與控制、工業(yè)過程控制與優(yōu)化、電力傳動(dòng)系統(tǒng)的計(jì)算機(jī)控制技術(shù)與仿真等方面的研究;

楊慕紫(1988-),女,遼寧阜新人,碩士研究生。主要研究方向?yàn)槊旱V安全生產(chǎn)過程監(jiān)測(cè)與控制、無線傳感器網(wǎng)絡(luò),327822293@qq.com;
馬冰(1989-),男,遼寧阜新人,碩士研究生。主要研究方向無線傳感器網(wǎng)絡(luò)定位技術(shù)。
ApplicationofanImprovedDV-HopLocalizationAlgorithmofWirelessSensorNetworktoLeakageFaultofUndergroundCoalMine*
PENGJishen*,YANGMuzi,MABing
(Department of Electrical and Control Engineering,Liaoning Technical University,Huludao Liaoning 125105,China)
The location of leakage fault is an important topic of power system protection in the real-time monitoring of transmission lines of coal mine. An improved DV-Hop localization algorithm is proposed in order to solve the problem of inaccurate localization for wireless sensor networks in the underground coal mine. Firstly,by calculating the triangle area of anchor nodes to eliminate the anchor node group of which the area is tiny. Then,a beacon node optimization is followed to eliminate the beacon nodes which are approximately in a line. Besides,the Genetic Chaos Particle Swarm Optimization algorithm was proposed based on the particle swarm optimization algorithm which combine with genetic algorithms and chaos. Finally,the improved particle swarm optimization was used to correct the location of DV-Hop algorithm. The results from simulation show that the proposed improved algorithm has better locating performance in positioning accuracy than the traditional DV-Hop algorithm in the same network environment. Therefore,the location of leakage can be monitored more accurately in the coal mine.
wireless sensor network;fault location;DV-Hop;chaos;genetic algorithm;particle swarm optimization algorithm
項(xiàng)目來源:遼寧省創(chuàng)新團(tuán)隊(duì)項(xiàng)目(LT2010047)
2014-05-20修改日期:2014-08-25
10.3969/j.issn.1004-1699.2014.10.023
TP393
:A
:1004-1699(2014)10-1431-06
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
工業(yè)設(shè)計(jì)(2016年4期)2016-05-04 04:00:23
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:55:34
現(xiàn)代企業(yè)(2015年6期)2015-02-28 18:51:50
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
河南科技(2014年8期)2014-02-27 14:08:07