運(yùn)動(dòng)參量校準(zhǔn)裝置運(yùn)動(dòng)特性分析
2014-09-07 03:52:18魯旭濤孫運(yùn)強(qiáng)
振動(dòng)與沖擊 2014年13期
關(guān)鍵詞:質(zhì)量
魯旭濤,孫運(yùn)強(qiáng),李 靜
(1.中北大學(xué) 儀器科學(xué)與動(dòng)態(tài)測試教育部重點(diǎn)實(shí)驗(yàn)室, 太原 030051;2.中北大學(xué) 電子測試技術(shù)國家重點(diǎn)實(shí)驗(yàn)室, 太原 030051)
實(shí)現(xiàn)沖擊響應(yīng)運(yùn)動(dòng)的方法有多種。常用的方法為使用運(yùn)動(dòng)控制器實(shí)現(xiàn)預(yù)定的運(yùn)動(dòng)狀態(tài),主要包括單片機(jī)或微處理器作為核心的運(yùn)動(dòng)控制器。但此類方法控制較為復(fù)雜,多用于實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng),一般不用于實(shí)現(xiàn)沖擊性的高速運(yùn)動(dòng)。另一種方法就是使用火藥或電磁力等實(shí)現(xiàn)沖擊性力源,并基于該力源實(shí)現(xiàn)沖擊性的高速運(yùn)動(dòng),此種方法能夠比較實(shí)際的復(fù)現(xiàn)需要模擬和測量的運(yùn)動(dòng)狀態(tài),但由于該方法的穩(wěn)定性和重復(fù)性都比較差,用于校準(zhǔn)高速測量設(shè)備時(shí)不能提供充分的有效測量機(jī)會(huì)。
常規(guī)沖擊校準(zhǔn)行程只有幾mm到幾十mm,頻率范圍比較窄,本文要實(shí)現(xiàn)高速運(yùn)動(dòng)狀態(tài)下的350 mm長距離的運(yùn)動(dòng)參量動(dòng)態(tài)校準(zhǔn),使用一般的方法是不可能的。
近十多年來,隨著沖擊校準(zhǔn)技術(shù)的研究日漸成熟,德國、英國和日本的國家計(jì)量機(jī)構(gòu)[1],對瞬態(tài)沖擊力的校準(zhǔn)表示出極大的關(guān)注,在傳統(tǒng)的穩(wěn)態(tài)正弦激振力源、落錘式動(dòng)態(tài)力源、階躍式力源的基礎(chǔ)上,提出使用空氣軸承的滑塊碰撞式力源裝置。2004年,德國物理技術(shù)研究院(PTB)的運(yùn)動(dòng)學(xué)研究部門,在原有加速度實(shí)驗(yàn)室(Section 1.31 Acceleration)的基礎(chǔ)上,新增了瞬態(tài)沖擊力實(shí)驗(yàn)室(Section 1.34 Impact Dynamics),明確提出瞬態(tài)沖擊力是沖擊加速度的導(dǎo)出量,兩者的基本原理、測量方法和硬件實(shí)現(xiàn)有著緊密的關(guān)系。
1 系統(tǒng)設(shè)計(jì)
本文設(shè)計(jì)了一套復(fù)合曲柄滑塊結(jié)構(gòu)[2],大曲柄連桿機(jī)構(gòu)用來保證大范圍的動(dòng)態(tài)位移,小曲柄連桿機(jī)構(gòu)用來保證速度和加速度要求。
機(jī)械裝置的原理圖如圖1所示。采用復(fù)合曲柄滑塊機(jī)構(gòu),分別由兩伺服電機(jī)驅(qū)動(dòng),二者協(xié)同分頻動(dòng)作,由上位機(jī)控制產(chǎn)生指定的動(dòng)態(tài)位移[3]、速度[4-5]、加速度[6-8]。圖中M為滑塊。本裝置可以產(chǎn)生0~460 mm的位移值,0~12 m/s的速度值和0~5 000 m/s2的加速度值。
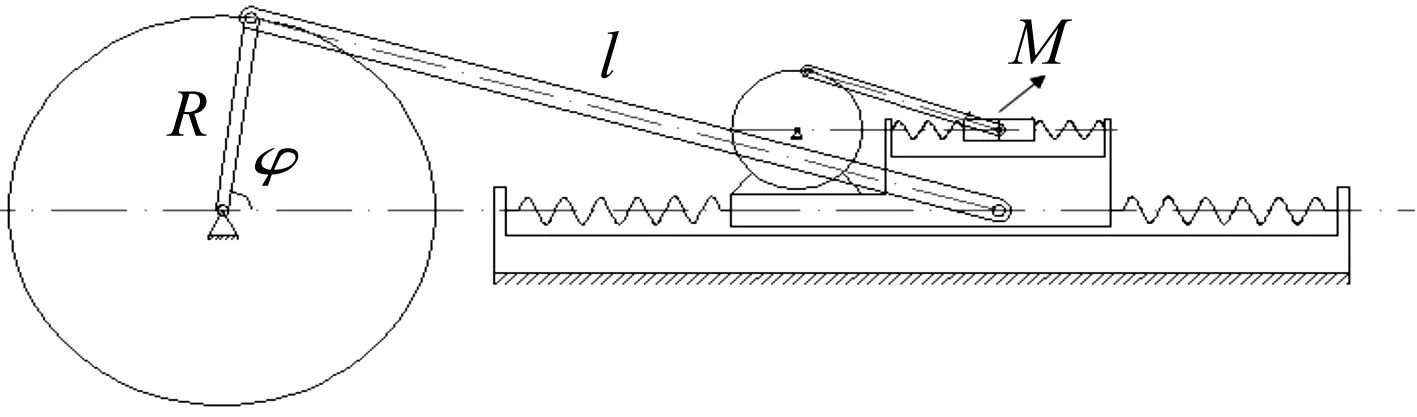
圖1 機(jī)械結(jié)構(gòu)原理圖
2 系統(tǒng)分析
2.1 機(jī)械裝置原理
從運(yùn)動(dòng)學(xué)觀點(diǎn),曲柄連桿機(jī)構(gòu)可分為中心曲柄連桿機(jī)構(gòu)、主副連桿式曲柄連桿機(jī)構(gòu)和偏心曲柄連桿機(jī)構(gòu)[9-11]。本文設(shè)計(jì)的復(fù)合曲柄滑塊結(jié)構(gòu)采用了中心曲柄連桿形式,連桿中心線通過曲軸的旋轉(zhuǎn)中心,且垂直曲柄的回轉(zhuǎn)軸線。
根據(jù)圖1可知,通過大曲柄連桿機(jī)構(gòu)和小曲柄連桿機(jī)構(gòu)聯(lián)動(dòng)來模擬沖擊響應(yīng)運(yùn)動(dòng);具體為:大電機(jī)驅(qū)動(dòng)大輪盤轉(zhuǎn)動(dòng),大輪盤通過大連桿驅(qū)動(dòng)大拖板按正弦規(guī)律沿大導(dǎo)軌進(jìn)行往復(fù)直線運(yùn)動(dòng)。
2.2 運(yùn)動(dòng)裝置運(yùn)動(dòng)學(xué)分析
當(dāng)滑塊做往復(fù)運(yùn)動(dòng)時(shí),位移、速度和加速度參數(shù)隨時(shí)變化。其中速度和加速度數(shù)值以及變化規(guī)律對復(fù)合曲柄滑塊結(jié)構(gòu)工作有很大影響,因此研究復(fù)合曲柄滑塊結(jié)構(gòu)運(yùn)動(dòng)規(guī)律的首要任務(wù)是研究滑塊的運(yùn)動(dòng)規(guī)律。
滑塊位移x:
此時(shí)滑塊的位移x為:
(r+l)-(rcosα+lcosβ)
(1)
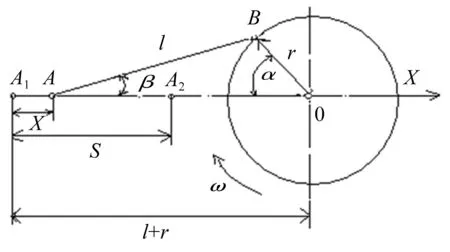
圖2 曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)簡圖
α-曲軸轉(zhuǎn)角;β-連桿擺角;r-曲柄半徑;S-滑塊行程;l-連桿長度;x-滑塊位移
為分析方便,以α代替β。那么在△OBA中,由正弦定理可得
rsinα=lsinβ
上式右端可按牛頓二項(xiàng)式展開,故
本系統(tǒng)采用復(fù)合曲柄滑塊結(jié)構(gòu),以大曲柄連桿機(jī)構(gòu)產(chǎn)生的往復(fù)直線運(yùn)動(dòng)頻率為基波,以小曲柄連桿機(jī)構(gòu)變頻產(chǎn)生的往復(fù)直線運(yùn)動(dòng)頻率為二次諧波,而sinα≤1,故上式展開的前兩項(xiàng)就足夠精確,即
將上式及λ=r/l代入式(1),并簡化為
故滑塊的位移公式為:
(2)
從式(2)可知,滑塊的位移按簡諧運(yùn)動(dòng)規(guī)律呈周期性變化,其大小僅與曲柄半徑、連桿比相關(guān),與滑塊質(zhì)量及曲柄轉(zhuǎn)速無關(guān)。
滑塊速度v:
將滑塊位移x對時(shí)間求導(dǎo)即可得到滑塊的速度v:
(3)
從式(3)可以看出,滑塊速度可視為v1=rωsinα及v2=rωλsin2α/2兩個(gè)簡諧運(yùn)動(dòng)的和運(yùn)動(dòng)。
當(dāng)α=0°或180°時(shí),滑塊在這兩點(diǎn)改變運(yùn)動(dòng)方向且速度為零。當(dāng)α=90°時(shí),v=rω,滑塊的速度等于曲柄中心的圓周速度。
滑塊加速度α:
(4)
因此,滑塊加速度也可以看成兩個(gè)簡諧運(yùn)動(dòng)加速度之和,即由α1=rω2cosα和α2=rω2λcos2α兩部分組成。
2.3 動(dòng)力學(xué)分析
作用在曲柄連桿機(jī)構(gòu)上的力主要有:慣性力、摩擦阻力。由于摩擦力的數(shù)值較小且變化規(guī)律難以掌握,分析時(shí)可把摩擦阻力忽略不計(jì)。
2.3.1 曲柄連桿機(jī)構(gòu)的動(dòng)力學(xué)簡化
曲柄連桿機(jī)構(gòu)的運(yùn)動(dòng)和質(zhì)量分布情況比較復(fù)雜。連桿做復(fù)雜的平面運(yùn)動(dòng),曲軸作定軸轉(zhuǎn)動(dòng),定軸轉(zhuǎn)動(dòng)雖然比較簡單,但曲軸上各點(diǎn)的旋轉(zhuǎn)半徑不同,各點(diǎn)的加速度也就不同。為了簡化計(jì)算,可使系統(tǒng)簡化,即將實(shí)際的質(zhì)量系統(tǒng)簡化為動(dòng)力學(xué)上相當(dāng)?shù)募匈|(zhì)量系統(tǒng),集中質(zhì)量系統(tǒng)由兩個(gè)集中質(zhì)量組成:
(1) 集中于滑塊中心的往返運(yùn)動(dòng)質(zhì)量mj,它等于滑塊質(zhì)量和連桿組簡化到小頭中心質(zhì)量之和。
(2) 集中于曲柄中心的旋轉(zhuǎn)運(yùn)動(dòng)質(zhì)量mr,它等于簡化到曲柄中心的曲拐不平衡質(zhì)量與連桿組簡化到曲柄中心的質(zhì)量之和。
2.3.2 往復(fù)慣性力和旋轉(zhuǎn)慣性力的計(jì)算
往復(fù)慣性力Pj
往復(fù)慣性力的大小為往復(fù)運(yùn)動(dòng)質(zhì)量mj和滑塊加速度a的乘積。
Pj=-mja=-mjrω2(cosα+λcos2α)
=Ccosα+Cλcos2α=Pj1+Pj2
(5)
式中:C=-mjrω2Pj1=CcosαPj2=Cλcos2α
當(dāng)曲軸轉(zhuǎn)速一定時(shí),ω一定,因此C在轉(zhuǎn)速一定時(shí)為常數(shù)。
Pj1稱為一級往復(fù)慣性力。它是曲柄轉(zhuǎn)角的余弦函數(shù),曲軸旋轉(zhuǎn)一圈,它變化一個(gè)周期;Pj2稱為二級往復(fù)慣性力。它是曲軸轉(zhuǎn)角2倍的余弦函數(shù),曲軸旋轉(zhuǎn)一圈,它變化兩個(gè)周期。
旋轉(zhuǎn)慣性力Pr
曲柄連桿機(jī)構(gòu)簡化到曲柄銷中心的旋轉(zhuǎn)運(yùn)動(dòng)質(zhì)量所產(chǎn)生的慣性力為:
Pr=-mrrω2
(6)
當(dāng)曲軸轉(zhuǎn)速一定時(shí),Pr的大小一定,其方向則始終沿曲柄方向向外。
2.3.3 滑塊上總作用力(合力)P∑分解與傳遞
如圖3所示,先將合力P∑分解成兩個(gè)分力:沿著連桿軸線作用的力K以及把滑塊壓向?qū)к壉诘膫?cè)向力N,其中沿著連桿的作用力K為:
(7)
而側(cè)向力N為:
N=P∑tanβ
(8)
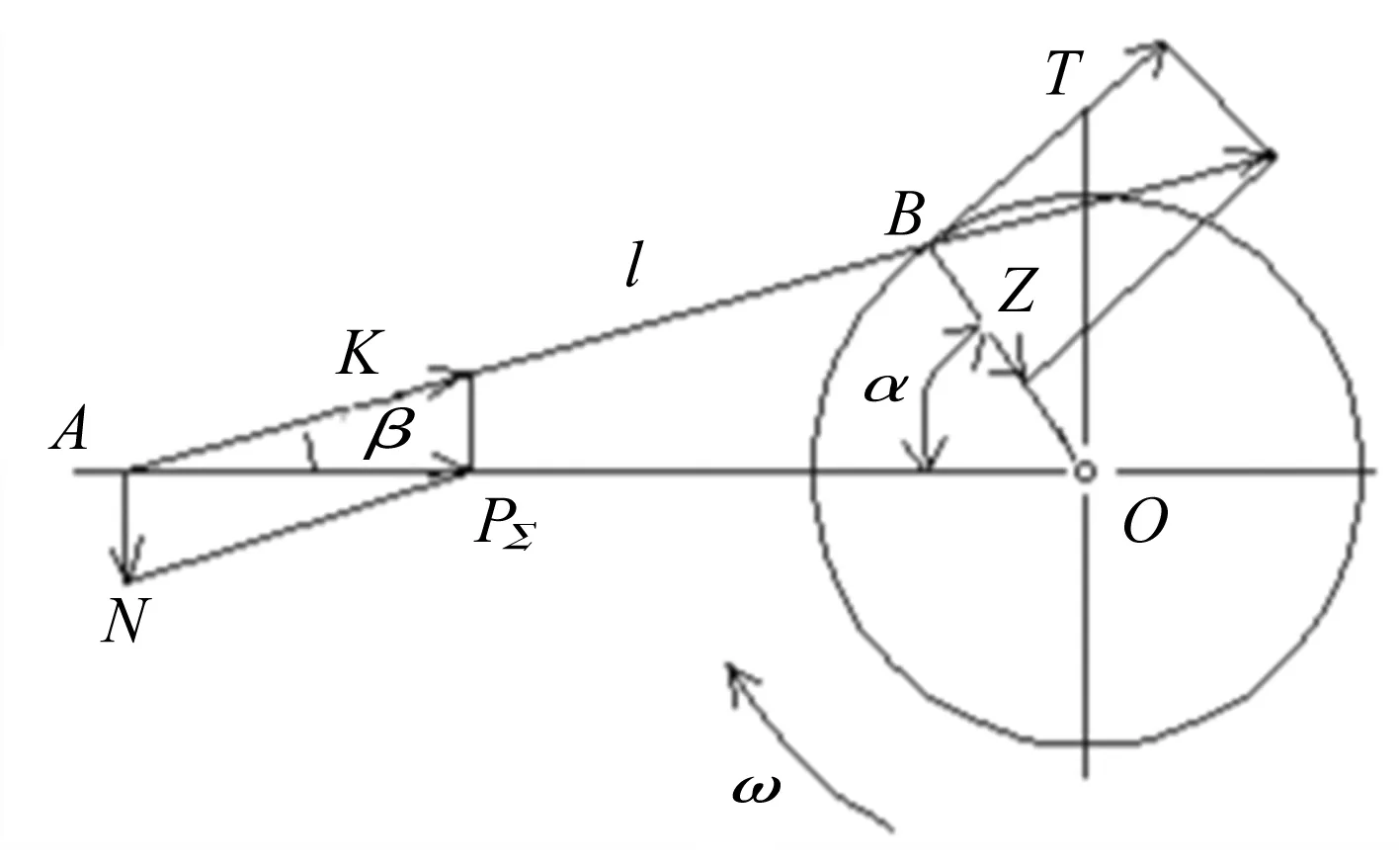
圖3 作用在曲柄連桿上的力和力矩
連桿作用力K的方向規(guī)定為:使連桿受壓為正號(hào),使連桿受拉為負(fù)號(hào);導(dǎo)軌壁的側(cè)向力N的符號(hào)規(guī)定為:當(dāng)側(cè)向力所形成反扭矩與曲軸旋轉(zhuǎn)方向相反時(shí),側(cè)向力為正值,反之為負(fù)值。
連桿作用力K通過連桿作用在曲軸的曲柄臂上,此力也可分解成兩個(gè)力,即推動(dòng)曲軸旋轉(zhuǎn)切向力T以及壓縮曲柄臂徑向力Z。即
(9)
(10)
規(guī)定力T和曲軸旋轉(zhuǎn)方向一致為正,力Z指向曲軸為正。
3 仿真分析
本文將利用Pro/E軟件建立曲柄連桿機(jī)構(gòu)仿真模型。在系統(tǒng)中,通過給曲柄添加一個(gè)恒定轉(zhuǎn)速為1 700 r/min的激勵(lì),來模擬曲柄連桿機(jī)構(gòu)在1 700 r/min的運(yùn)動(dòng),運(yùn)動(dòng)仿真曲線如圖4所示,從圖中可以看出仿真數(shù)據(jù)與式(2)~(4)計(jì)算結(jié)果相符,同時(shí)對本系統(tǒng)進(jìn)行了測量試驗(yàn),數(shù)據(jù)與文獻(xiàn)[2]吻合,測量誤差在0.5 %以內(nèi),在允許的測量誤差范圍內(nèi),系統(tǒng)的重復(fù)性也比較好。
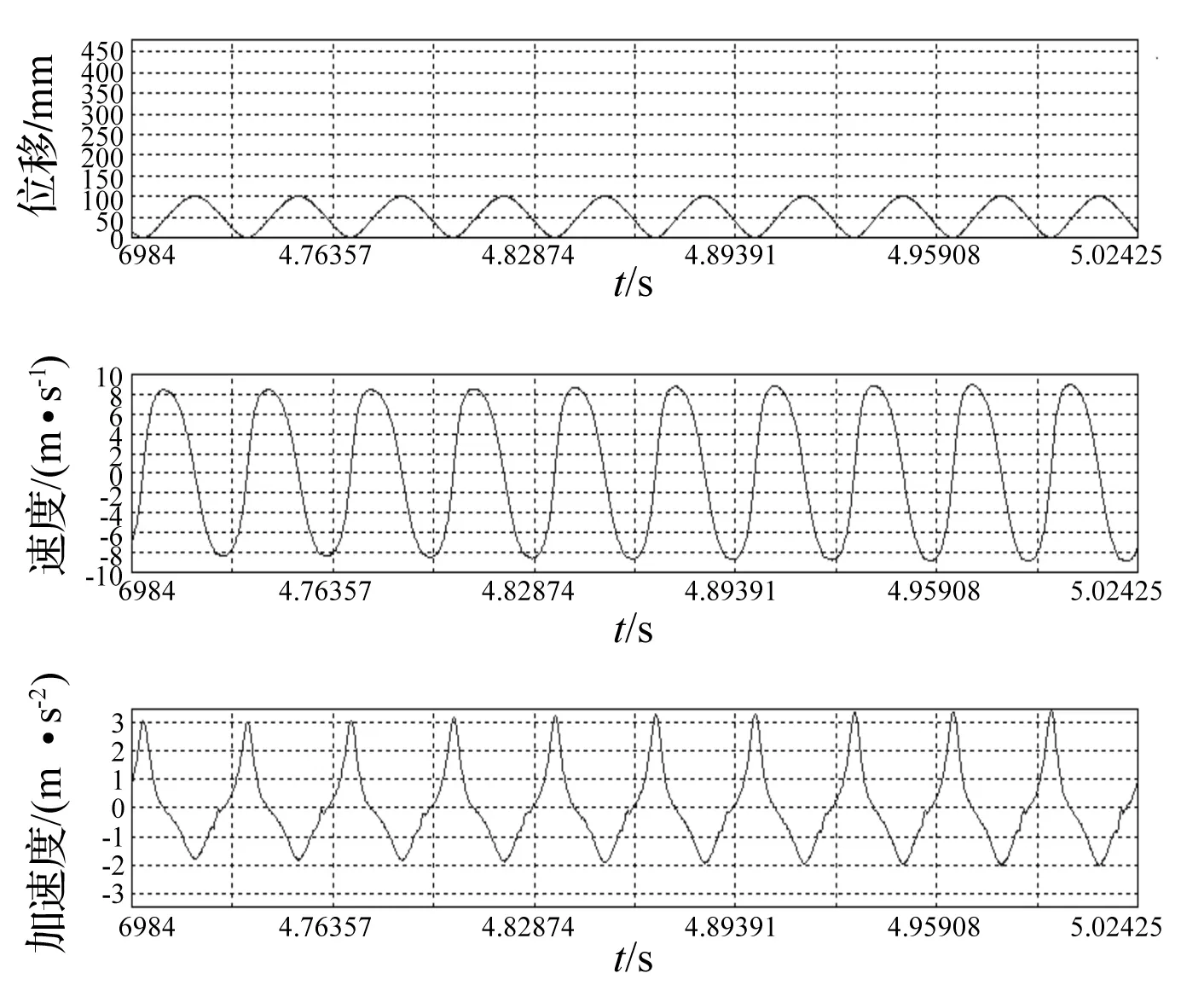
圖4 位移、速度和加速度曲線圖
4 結(jié) 論
本文依據(jù)諧波理論建立了曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)模型和動(dòng)力學(xué)簡化模型,分析了曲柄連桿機(jī)構(gòu)滑塊運(yùn)動(dòng)規(guī)律,計(jì)算了機(jī)構(gòu)往復(fù)慣性力和旋轉(zhuǎn)慣性力,利用Pro/E軟件對曲柄連桿機(jī)構(gòu)仿真模型進(jìn)行了仿真分析,通過對復(fù)合滑塊結(jié)構(gòu)運(yùn)動(dòng)受力理論分析及軟件動(dòng)力仿真得出以下結(jié)論:
從表1可知:連桿的角位移只和連桿比有關(guān),和其他因素?zé)o關(guān);角速度和角加速度除了和連桿比有關(guān)外,還與曲軸轉(zhuǎn)速有關(guān),角速度和曲柄轉(zhuǎn)速成正比,角加速度和曲柄轉(zhuǎn)速二次方成正比。
通過采用雙曲柄連桿機(jī)構(gòu)聯(lián)動(dòng)來模擬沖擊響應(yīng)運(yùn)動(dòng),用簡單的運(yùn)動(dòng)結(jié)構(gòu)實(shí)現(xiàn)了校準(zhǔn)設(shè)備的最優(yōu)化設(shè)計(jì),同時(shí)實(shí)現(xiàn)了多參數(shù)校準(zhǔn),徹底解決了目前針對運(yùn)動(dòng)參量的單一參數(shù)校準(zhǔn)均存在局限性、以及尚無一種能夠?qū)\(yùn)動(dòng)參量同時(shí)進(jìn)行多參數(shù)校準(zhǔn)的裝置的問題。
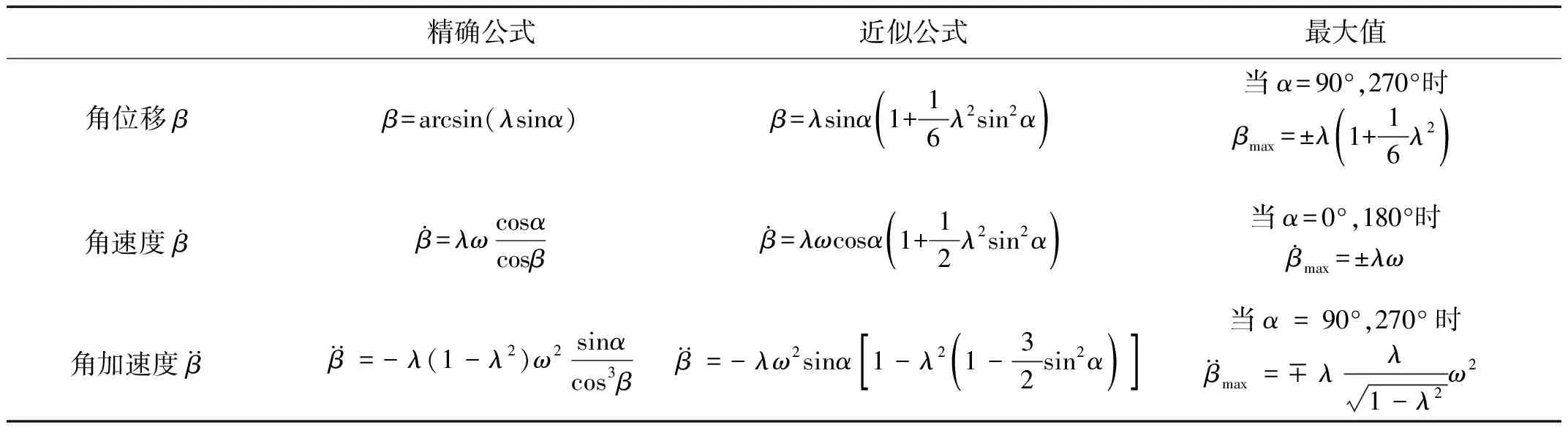
表1 連桿的運(yùn)動(dòng)規(guī)律
[1] Oota A,Usuda T, Aoyama H, et al. Development of primary calibration system for vibration and acceleration standard in high frequency range with laser interferometer with multifold optical path[J].IEEE Transactions on Sensors and Micromachines,2006,126(11):612-620.
[2] 魯旭濤,孫運(yùn)強(qiáng),陳以方. 運(yùn)動(dòng)參量校準(zhǔn)裝置系統(tǒng)研制[J]. 振動(dòng)與沖擊, 2012,31(14):177-180.
LU Xu-tao, SUN Yun-qiang, CHEN Yi-fang.Development of motorial parameters calibration apparatus system[J]. Journal of Vibration and Shock,2012,31(14):177-180.
[3] Wakui,Shinji, Kojima, et al. Realization of displacement sensor using calibration coil[J]. Seimitsu Kogaku Kaishi/Journal of the Japan Society for Precision Engineering, 2007,73(3):393-397.
[4] Zhang Qi-cheng, Kong De-ren, Pang Zhong-gen, et al.Calibration method of projectile-velocity measurement system[J]. Nanjing Li Gong Daxue Xuebao/Journal of Nanjing University of Science and Technology, 2010,34(1):96-98.
[5] Cai Rong-li, Ni Jin-ping, Ma Shi-liang, et al.Velocity measurement system of tracer based on laser screen[J].Dandao Xuebao/Journal of Ballistics, 2011,23(2):92-95.
[6] von Martens H J, Taubner A, Wabinski W,et al. Traceability of vibration and shock measurements by laser interferometry [J].Measurement,2000(28):3-20.
[7] Umeda A,Ueda K.Study on the dynamic force acceleration measurement [J].Sensors and Actuators,1990,A21-A23:285-288.
[8] Ryoji O, Nobuharu M, Michiaki S. An efficient calibration method for a novel 6-DOF acceleration sensor system and application to measurement of a vehicle motion[J].Proceedings of IEEE Sensors, p 600-605, 2010, IEEE Sensors 2010 Conference, SENSORS 2010.
[9] Li Su-lan. Integrated design method considering closed-loop stability for the slider-crank mechanism[J]. Xi’an Dianzi Keji Daxue Xuebao/Journal of Xidian University, 2013,40(2):43-47.
[10] Sun Jian, Xu Gui-yun. Deviation analysis and optimization of offset slider-crank mechanism based on the simulation[J].Information Technology Journal, 2013,12(12):2390-2397.
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年10期)2022-11-10 09:37:42
中學(xué)生數(shù)理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(shè)(2018年6期)2018-04-22 03:16:54
產(chǎn)品可靠性報(bào)告(2017年7期)2017-09-05 09:49:12
中學(xué)生數(shù)理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54