并聯機構五自由度混聯機械手虎克鉸有限元分析
2014-09-06 08:20:52
機械與電子 2014年9期
(貴州理工學院工程實訓中心,貴州 貴陽 550003)
并聯機構五自由度混聯機械手虎克鉸有限元分析
趙藝璇
(貴州理工學院工程實訓中心,貴州 貴陽 550003)
0 引言
隨著機電一體化技術的迅速發展,機械手這種機器人技術和機床技術相結合的產物應運而生,引起了國際上廣泛關注。機械手及其零部件的結構也日趨高精度化和復雜化。傳統的設計方法,如類比設計法和經驗設計等方法煩瑣且設計粗糙,耗費大量人力,物力,也很難獲得各項指標優良的設計方案,不能滿足現代機械設計的要求。為此,采用SolidWorks軟件,對并聯機構五自由度混聯機械手虎克鉸進行有限元分析和研究,得出的分析結果,對于虎克鉸在機械手上的應用具有一定的參考價值。
1 虎克鉸在并聯機構五自由度混聯機械手上的工況分析
1.1 并聯機構五自由度混聯機械手
并聯機構如圖1所示。所研究的虎克鉸,是并聯機構五自由度混聯機械手上應用的零部件之一,它現實生產中主要運用在汽車修復中的機械手,適用于重復工作的、可以改變動作程序的自動修復設備,操作單調頻繁的生產場合。并聯機構五自由度混聯機械手,是PR-2UPS并聯機構構成的五自由度混聯機械手,模型由動平臺1條PR支鏈和2條UPS支鏈并聯構成,由定長連桿通過導軌滑塊與機架相連,一端由轉動副R與動平臺相連。

圖1 并聯機構
1.2 約束條件的確立
平移時的行程為1000mm。對于每條UPS支鏈,一端通過內套筒鏈接球面副與動平臺連接,另一端通過虎克鉸與機架鏈接,由2條支鏈的伸縮來控制動平臺的轉動,其中球副的最大擺角為30°,通過動平臺掃過的扇形面積實現 800mm的行程。機架內連接滑塊,該滑塊可以沿著固定于基座的滑道上下移動,實現500mm行程,機械手末端的可達工作空間為1000mm×800mm×500mm,虎克鉸旋轉角度為0°。在載荷為400N時進行靜力分析。
2 基于SolidWorks軟件有限元分析
2.1有限元分析流程
有限元的核心思想是結構的離散化,就是將實際結構假想地離散為有限數目的規則單元組合體,實際結構的物理性能可以通過對離散體進行分析,得出滿足工程精度的近似結果來替代對實際結構的分析,這樣可以解決很多實際工程需要解決而理論分析又無法解決的復雜問題[1]。簡言之,有限元分析可分成3個階段,前處理、處理和后處理,主要流程如圖2所示。這里只進行靜力分析。建立有限元模型屬于前處理,主要完成單元網格劃分,是處理和后處理的基礎。對PR-2UPS并聯機構構成的五自由度混聯機械手建立正確的有限元建模,生成合理的網格,可以得到精確的有限元分析結果。
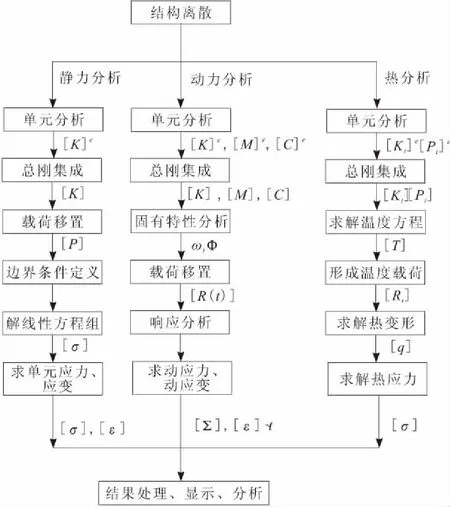
圖2 有限元分析流程
2.2 基于SolidWorks Simulation有限元建模流程
利用SolidWorks Simulation軟件,對PR-2UPS并聯機構構成的五自由度混聯機械手進行有限元分析,建立有限元模型的一般過程如圖3所示。
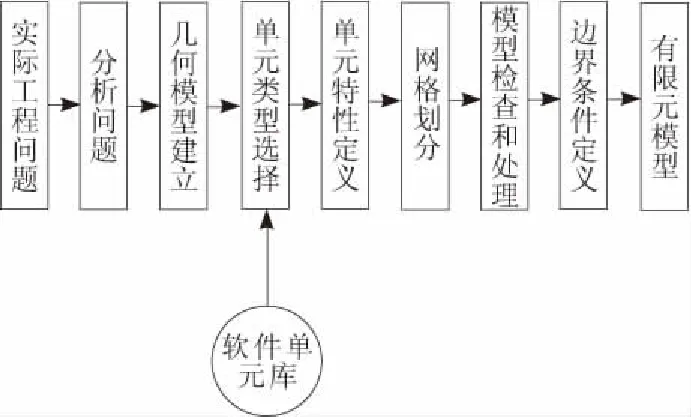
圖3 有限元建模流程
有限元建模具體操作過程為:
a.將UG 6.0建立的零件實體模型導入SolidWorks 軟件中,重新進行裝配,簡化裝配圖[2]。
b.將裝配圖直接在SolidWorks Simulation打開。
c.定義接觸的各面及零部件的接觸。
d.選擇網格的劃分類型,劃分網格。
建模階段是根據結構實際形狀和實際工況條件建立有限元分析的計算模型(有限元模型),從而為有限元數值計算提供必要的輸入數據。根據SolidWorks Simulation軟件中網格劃分流程,虎克鉸有限元模型的建立如圖4所示。
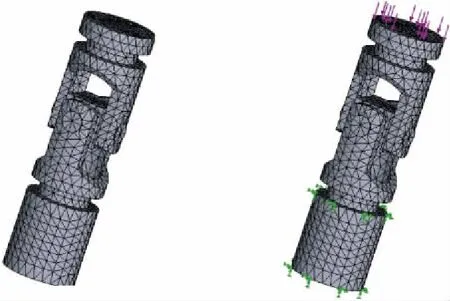
圖4 虎克鉸有限元網格劃分
3 加載與分析
這里所討論的機械手主要用于汽車修復,所受的力基本是自身重力,又因為機械手大約為90kg,自身重力為900N,因此,整體受力分析時施加載荷1000N,方向豎直向下的。確定定位面,將載荷施加在實體上,對虎克鉸進行后處理,在X軸、Y軸和Z軸方向上的分力通過有限元軟件自動生成。有限元計算求解完畢后,查看計算的結果,來判斷和驗證有限元分析是否正確,通過應力、應變和變形圖來分析機構設計存在的不足。在SolidWorks Simulation分析軟件中,使用顏色來區分各部件受力以后應力、應變和形變的發生情況,這樣可以通過色譜圖直觀地了解模型的受力變化情況。比分析大量復雜數據更加簡便快捷,更好地得到結果。在色譜圖上,從各數值由大到小變化對應的顏色的變化依次是由紅到藍逐漸過渡,從紅色到藍色有各種色帶分布,這里設定13種[3]。
旋轉角度為0°,載荷400N的情況下靜力分析圖如圖5所示。應變圖如圖6所示。可以發現應變圖與應力圖的顏色變化是完全相同的,也就是應力大的地方應變也大,最大值為4.01×10-7。根據圖7顯示的位移圖,發現虎克鉸的十字軸變形不大,但受力端的變形相對較大,最大值為3.83×10-5mm,從圖7中可以觀察到直接受力的地方變形最大,離固定端越遠,變形越大[4]。

圖5 虎克鉸應力
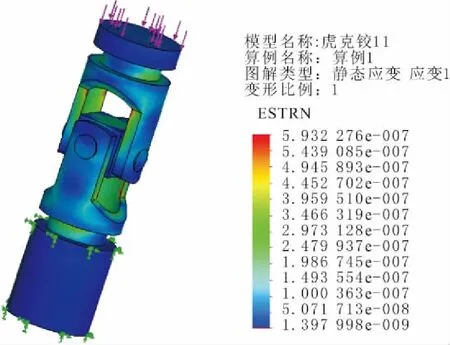
圖6 虎克鉸應變
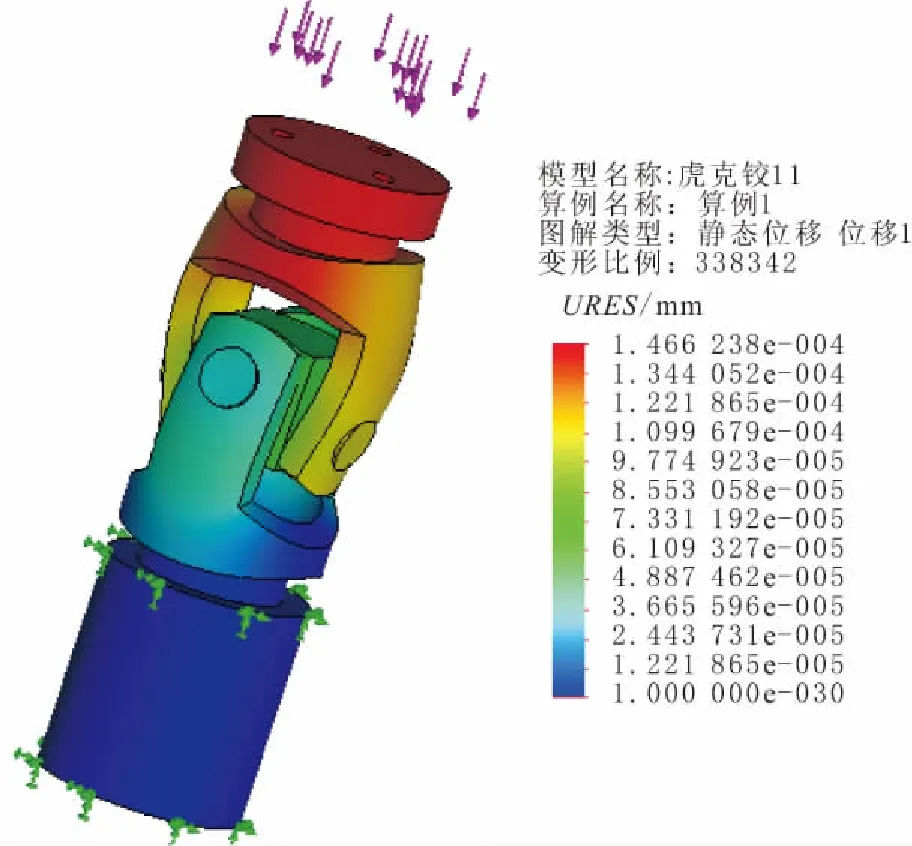
圖7 虎克鉸位移
4 結束語
虎克鉸作為并聯機構的一個重要連接件,它帶來的誤差會直接影響機械手的精度。以SolidWorks軟件為平臺,對并聯機構虎克鉸進行了分析,為并聯機械手的設計提供一定的參考依據。通過對并聯五自由度機械手虎克鉸的應力、應變和位移圖分析以及整理的數據分析,可知虎克鉸是應力集中較大部位。也就是說在工作過程中,虎克鉸離固定端越遠,變形越大,磨損越快,導致虎克鉸使用年限短。虎克鉸鏈應力會使機械手變形產生間隙,會引起機械手的機械誤差。應力越大,產生的應變也就越大,兩者成正比關系。
[1] 康國政.大型有限元程序的原理、結構與使用[M].2版.成都:西南交通大學出版社,2008.
[2] 張云杰.UG NX 6.0零件與裝配設計[M].北京:清華大學出版社,2010.
[3] 李 彬,黃 田,張利敏,等.一種新型五自由度混聯機械手的概念設計及尺度綜合[J].中國機械工程,2011,22(16):1900-1905.
[4] 馮志友,張 燕,楊廷力,等.基于牛頓歐拉法的2UPS-2RPS并聯機構你動力學分析[J].中國機械工程,2009,40(4):193-197.
Five Degrees of Freedom Hybrid Parallel MechanismManipulator Hooke Joint Finite Element Analysis
ZHAOYixuan
(Engineering Training Center,Guizhou Institute of Technology,Guiyang 550003,China)
根據機械手虎克鉸的基本工作原理,基于SolidWorks軟件,建立了并聯機構構成的五自由度混聯機械手虎克鉸有限元分析方案,并分別針對機械手應力、應變和位移進行了有限元分析。研究表明,有限元分析法運用在機械手零部件分析上能夠直觀發現設計存在的不足和問題,對于推進并聯機器人技術的工程應用具有重要的實用價值。
五自由度;有限元分析;虎克鉸
According to Hooke hinge robot basic working principle,the establishment of a universal joint hybrid finite element analysis program based on five degrees of freedom manipulator SolidWorks software for parallel mechanism constituted respectively for robot stress,strain,displacement finite element analysis,research show that the finite element analysis method used in the analysis of robot parts can be found insufficient and intuitive design problems exist. For propulsion engineering applications of parallel robot technology has important theoretical significance and practical value.
five degrees of freedom;finite element analysis;Hooke’ s joint
2014-04-30
貴州理工學院科學基金資助項目(XJRW20131201)
TP241
A
1001-2257(2014)09-0060-03
趙藝璇(1990-),女,貴州遵義人,學士,研究方向為機械設計制造及自動化。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
終身教育研究(2014年5期)2014-02-28 01:23:06
