單軸氣浮平臺的角動量測試系統設計
2014-09-06 10:49:56劉寅琛崔劍王亮
單片機與嵌入式系統應用 2014年4期
劉寅琛,崔劍,王亮,
(1.北京航空航天大學 自動化科學與電氣工程學院,北京 100191;2.北京航空航天大學 工程訓練中心)
?

劉寅琛1,崔劍2,王亮1,2
(1.北京航空航天大學 自動化科學與電氣工程學院,北京 100191;2.北京航空航天大學 工程訓練中心)
為了測量氣浮平臺臺面上轉動部件的角動量,需要測量氣浮平臺工作過程中諸如轉速、轉角以及轉動慣量等物理量。為此,設計了一臺單軸氣浮平臺的測試系統,描述了系統的整體結構和相關物理量的測量方法,介紹了系統各模塊的硬件和軟件設計,重點提出了氣浮平臺臺上和臺下相關性數據的時間同步方案。系統測試設備簡單,具有很高的數據測量精度和相關性數據的時間同步精度。
單軸氣浮平臺;測試系統;角動量測量;時間同步
引 言
本文設計了基于單軸氣浮平臺的角動量測試系統,與單軸氣浮平臺本體共同構成單軸氣浮平臺系統,實現對單軸氣浮平臺臺面轉動部件角動量的高精度和高穩定度測量。
1 系統總體結構設計
具有單個轉動單元的轉動部件的角動量輸出,可以通過測量轉動單元的轉動慣量和轉動單元相對安裝面的角速度實現。但是,對于多轉動單元、多自由度以非正交方式耦合的情況,如果分別對各個轉動單元角動量輸出進行測量,然后通過耦合分析得到的綜合輸出會因中間環節過多而增大測試誤差。利用氣浮平臺測試系統可以實現轉動部件角動量輸出的直接測量,從而減少中間環節,提高測量精度,被測轉動部件輸出角動量Hout如下[3]:
(1)
單軸氣浮平臺角動量測試系統的總體結構框圖如圖1所示。構成單軸氣浮平臺測試系統主體的單軸氣浮平臺由轉動部分和固定部分組成,為了保證氣浮平臺近似無摩擦的相對運動,將轉動臺面上的設備和臺下固定部分的設備進行完全的物理隔離,對臺上的設備采用高蓄能電池供電,臺上和臺下之間數據信息和控制命令等的傳輸采用無線通信方式,減少干擾力矩。
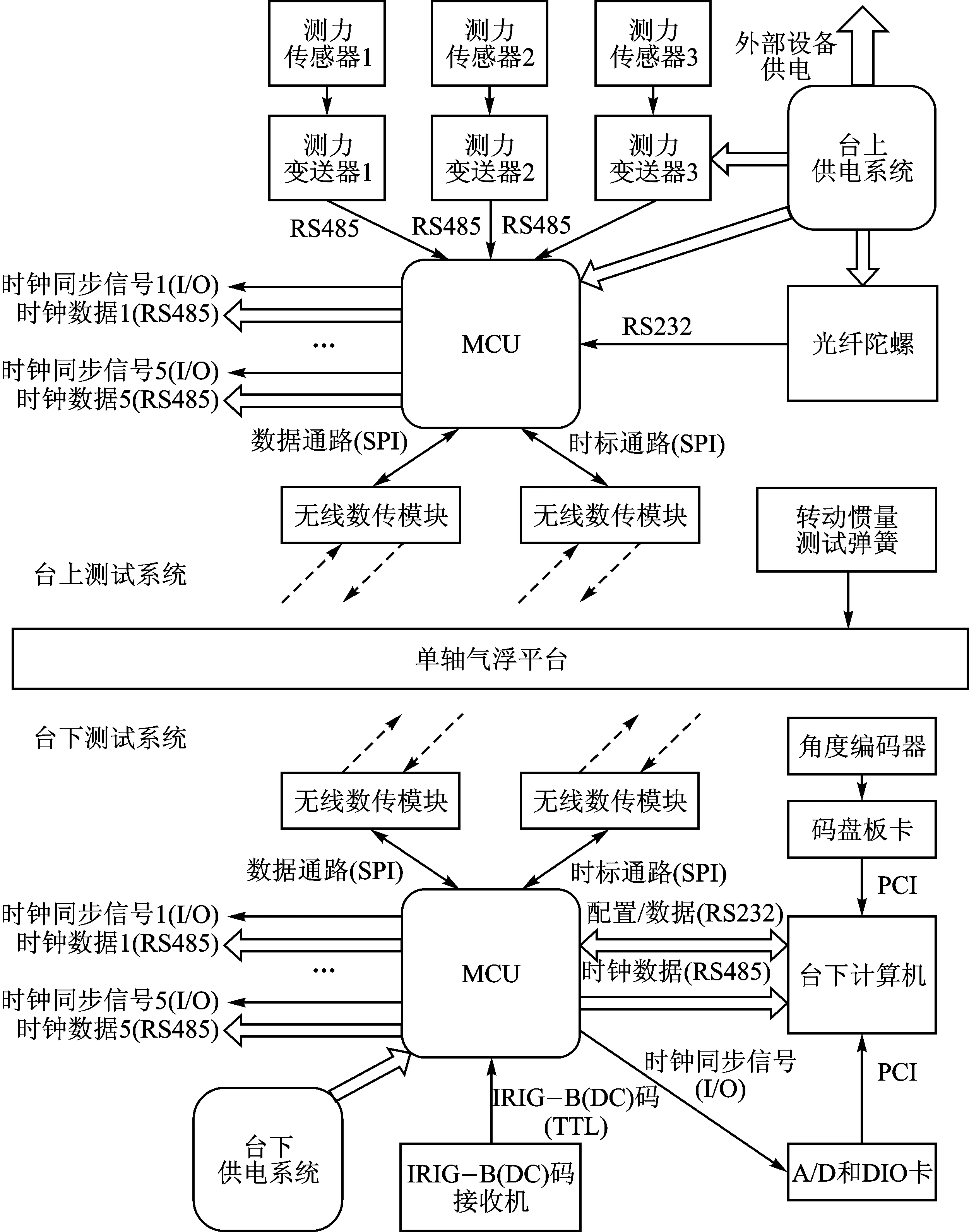
圖1 系統總體結構框圖
臺上測試系統的陀螺數據、臺下測試系統的角度數據的讀取以及臺上和臺下的5路時間同步信號需要達到高精度的時間同步。使用PIC32單片機解調IRIG-B(DC)時間碼[4]獲取絕對時間,并用軟件補償延時的方法使各路數據的獲取達到高精度時間同步。
由式(1)可知,為了實現對氣浮平臺臺面上轉動部件角動量的高精度測量,對氣浮平臺角動量測試系統的轉動慣量測量、角速度測量和系統其他相關的關鍵單元的測試精度提出了較高的要求。
2 系統關鍵單元設計
2.1 質心測量單元設計
單軸氣浮平臺臺面裝載有效負載后,為盡量減小干擾力矩,確保系統測試精度,應盡量減少臺面質心相對于臺體回轉軸線的偏移量,因此需要在氣浮平臺工作前測量轉動臺面及負載的質心,并進行調整。
采用三點支撐法進行質心測量。用3個測力傳感器支承氣浮平臺轉動臺面(包括負載),根據力矩平衡原理測量氣浮平臺的質心。3個測力傳感器均布于臺面上,與之對應的三個稱重壓片安裝在軸承基體上。該方法結構簡單,測量效率和精度比較高。若稱重傳感器所測得力分別為f1、f2、f3,則工作臺總質量M為:
(2)
式中:g為重力加速度,單位為N/kg。
根據力矩平衡原理可得質心坐標計算式為:
(3)
式中:xi,yi為測力傳感器i的坐標,i=1,2,3。
由上述計算式計算得到質心坐標,調整轉動臺面上負載的位置,減小偏移量,反復測試和調整以達到質心偏移要求。測量誤差主要來自傳感器測量誤差以及傳感器定位誤差。前者取決于傳感器的測量精度,而定位誤差取決于加工及安裝誤差。
鑒于轉動臺面與軸承基體之間空間較小,測力傳感器選用微型壓力傳感器、可選用LC4700型號的測力傳感器、TR200H型號的測力變送器。
2.2 轉動慣量測試單元設計
測試轉動慣量是單軸氣浮平臺仿真實驗的一項重要前期工作,測試轉動慣量的方法很多。若物體形狀簡單且質量分布均勻,可以直接計算而獲得其轉動慣量。對于單軸氣浮平臺及其負載和設備這樣復雜的系統,只能通過實驗手段測量其轉動慣量。
轉動慣量測試方法的選擇略——編者注。本系統采取簡諧振動差值法測量氣浮平臺及臺面負載的轉動慣量。
測試方法設計如下:由簡諧振動差值法原理可知,測量轉動慣量時在轉動臺面和基座相應位置安裝彈簧和測試砝碼;通過氣浮平臺的測試系統記錄振動波形,利用快速傅里葉變換進行自譜分析可得到精確的頻率值;將加配重前后的頻率值、以及配重相關參數帶入公式,即可算得氣浮平臺及其負載的轉動慣量。改變砝碼質量和安裝位置,多次測量取平均值。測試流程如圖2所示。
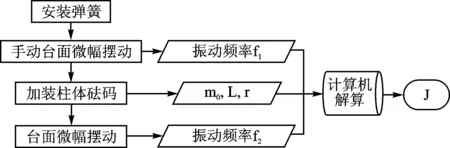
圖2 轉動慣量測試流程
轉動慣量測試完成后須將彈簧和砝碼拆下,以免影響氣浮平臺正常工作。
2.3 測角單元設計
測角單元實現對氣浮臺轉動角度的測量,安裝在氣浮平臺內部,角度編碼器必須采用分體式結構,編碼器和固定裝置在物理上是分離的,從而避免軸系摩擦力矩對氣浮平臺測量精度的影響。
角度編碼器選擇ERP880型無內置軸承角度編碼器,測角精度可達±1″。讀數頭讀取的測量數據通過角度編碼器板卡IK220進行采集和細分,細分后數據位數最高可達29位。板卡接口為PCI總線形式。經控制計算機處理計算可得氣浮平臺的轉動角度,測角單元程序流程圖如圖3(a)所示。
2.4 測速單元設計
測速單元實現對氣浮臺轉動角速度的高精度測量,主要包括光纖陀螺儀、供電系統、臺上MCU、無線傳輸模塊等。臺下無線接收模塊接收臺上無線發射模塊發送的陀螺速度數據,傳輸到上位PC機處理和存儲。
選擇F98M-M型光纖陀螺儀,角速度信息以RS232串口形式輸出。測量速度分辨率達到0.1″/s,測量重復精度達到0.000 03(°/s),動態測量精度達到0.000 17(°/s)。測速單元程序流程圖如圖3(b)所示。
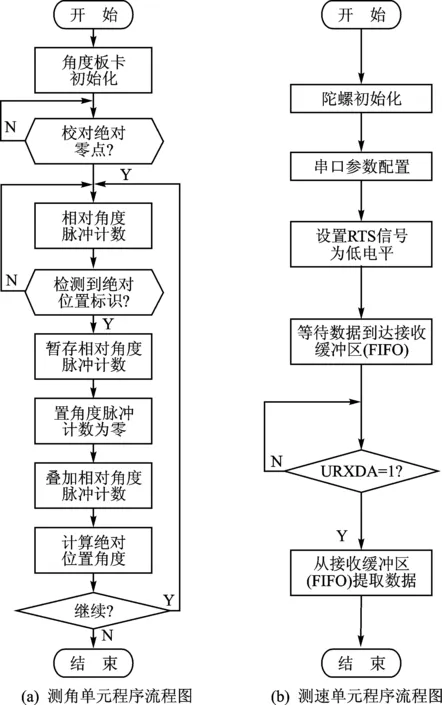
圖3 測角單元和測速單元程序流程圖
2.5 數傳單元設計
數據傳輸單元負責將氣浮平臺臺上MCU讀取的數據及時準確地傳送給臺下MCU,并將主計算機的控制指令通過臺下MCU回傳給臺上MCU。根據系統要求,臺上和臺下之間采用無線方式進行通信。無線收發器技術具有功耗低、抗干擾能力強、自主開發程度高、開發成本低、技術成熟、靈活度極高等優點[9],是氣浮平臺測試系統中無線通信的最佳方案。
在目前較為流行的無線通信芯片中,從使用的方便性、傳輸速度和輸出功率等各個方面考慮,nRF24L01型號的無線收發模塊是一種比較理想的選擇。它的增強型ShockBurst工作模式對節省指令時間、提高時間同步精度起到重要作用。nRF24L01無線模塊發送模式和接收模式程序流程圖如圖4所示。

圖4 無線模塊發送模式和接收模式流程圖
2.6 時統單元設計
分布式采集系統由一組獨立的數據采集器件組成,它們之間相互連接、共享信息,注重各個系統之間的配合,因此在分布式系統中需要引入時鐘同步技術[10]。在氣浮平臺測試系統中,時統系統通過獲得IRIG-B(DC)碼的精確授時信息,并對無線傳輸過程中的延遲進行補償,為被測設備、測角和測速單元提供統一的時間標準,從而保證分布式數據對時間的一致性。
2.6.1 IRIG-B(DC)碼格式及其解碼設計
IRIG-B時間碼(簡稱B碼)是一種時間同步標準碼,廣泛應用于靶場時間信息的傳遞和各系統間的時間同步,具有信息量大、分辨率高、適合于傳輸、抗干擾能力強和通用性好的特點[11]。在本系統中,采用IRIG-B(DC)碼獲取絕對時間,對整個系統進行高精度的授時,在實驗方式和成本方面是最合適的方案。
IRIG-B(DC)碼是一種串行脈寬編碼,有3種碼元,每個碼元分別占據10 ms的時間,邏輯“1”和邏輯“0”所對應碼元的高電平持續時間分別為5 ms和2 ms,P碼元稱為位置識別碼元,用于定位編解碼,高電平持續時間為8 ms。IRIG-B(DC)碼一秒傳送一幀數據,每一幀所包含的時間信息略——編者注。
IRIG-B(DC)碼的解碼分為兩個部分,一是對準時沿的提取,二是對時間信息的解碼。對準時沿的提取是解碼的關鍵,準時沿的提取誤差將直接影響秒脈沖的精度。對時間信息解碼就是將B碼中包含的時、分、秒信息提取出來,轉換成時間數據的形式。
單片機解碼流程圖略——編者注。
2.6.2 氣浮平臺臺上和臺下的時間同步方案
單片機對IRIG-B(DC)碼進行軟件解碼后,根據解碼的結果,修正臺下MCU本地時鐘。本地時鐘采用外接高頻高穩定度恒溫晶體分頻定時,保證本地時鐘具有很低的計時抖動,降低計時帶來的時間同步誤差。
臺下系統和臺上系統通信采用半雙工進行,臺下MCU為主控機,臺上MCU為客戶機,主控機在Th時刻向客戶機發送固定的測量幀,客戶機接收后將客戶機本地時間Ts發送給主控機,主控機接收后根據發送時刻Th和接收時刻Td計算出線路延遲ts,并將延時補償后的初始時刻發送給客戶機進行精確授時。
PIC32單片機最高工作頻率為80 MHz,中斷響應時間很短,采用中斷方式響應無線模塊的狀態,可以最大幅度地減少處理器響應延遲,為精確的定時同步提供保障。由于臺上和臺下計算機都采用相同的MCU和收發模塊,則主控機向客戶機發送信號和客戶機向主控機發送信號的延時近似相等,均為ts,則有:
(4)
式中:tp為客戶機收到授時標志后,到返回授時標志的處理時間。由于PIC32 MCU處理器的響應時間非常快(1/80 MHz = 0.012 5 μs),故相較時統系統的時間誤差5 μs,可以忽略。故式(4)可以簡化為:
(5)
由式(5)可以解得:
(6)
當主機通過計算得到ts時,就可以將原始授時點時刻補償ts延遲之后的值發送給客戶機,保證客戶機本地時鐘和主機時鐘嚴格同步。臺上系統的時統輸出信號和臺下系統相同,在此不再贅述。臺上和臺下系統的時統子程序流程圖如圖5所示。
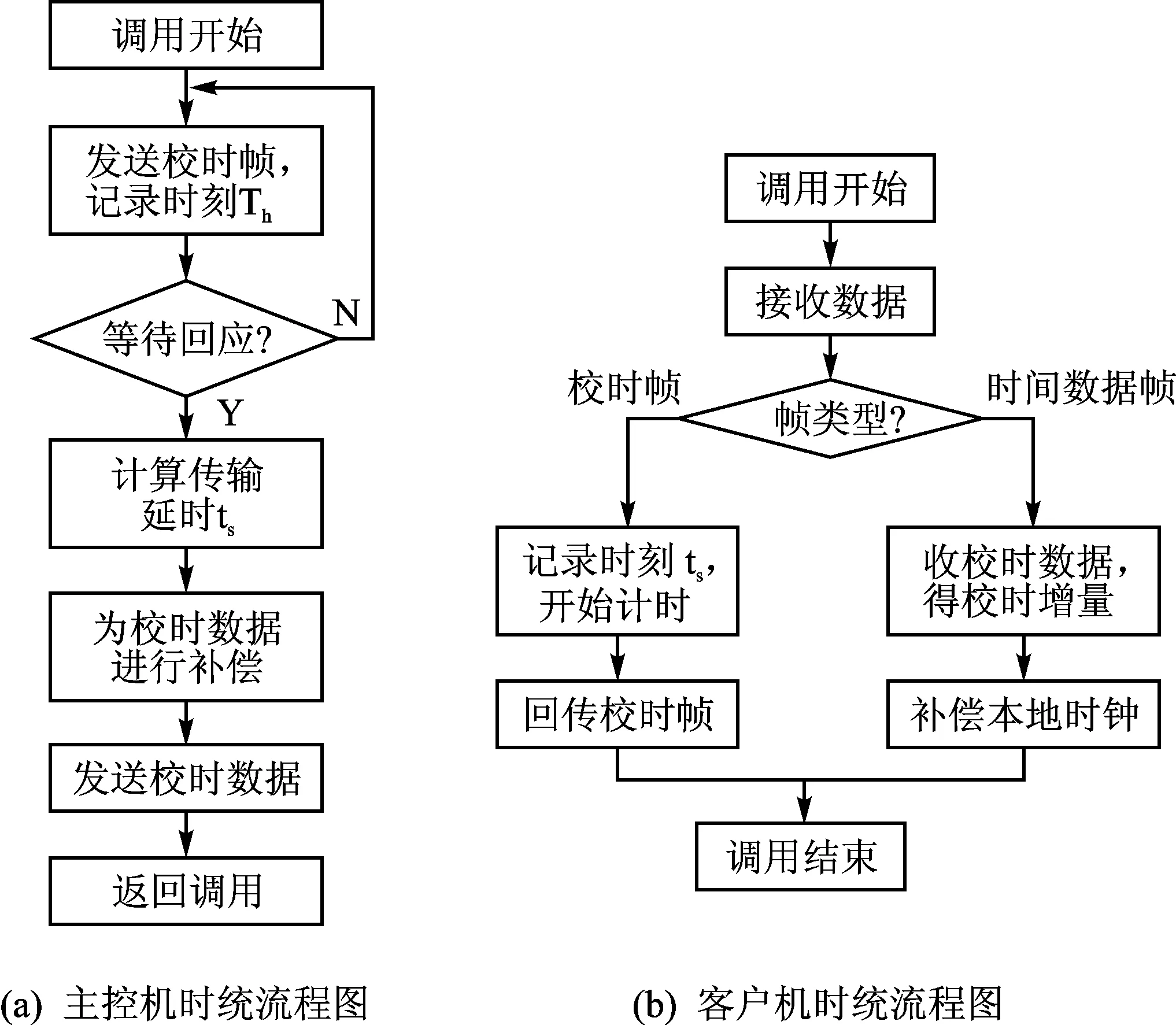
圖5 臺下系統和臺上系統無線時統流程圖
結 語
該設計方法測試設備簡單,具有很高的數據測量精度和相關性數據的時間同步精度,對監測衛星平臺的擾動以及相應的控制設計具有重要的指導意義。

[1] 魯興舉.空間飛行器姿態控制仿真試驗平臺系統研究與設計[D].長沙:國防科技大學,2005.
[2] Bernstein D S, McClamroch N H, Bloch A. Development of air spindle and triaxial air bearing testbeds for spacecraft dynamics and control experiments[J]. Proceedings of the American Control Conference Arlington, 2001(6): 3967-3972.
[3] 許峰,李治國.一種利用單軸氣浮平臺測量角動量的方法[J].科學技術與工程,2007,24(7):6479-6482.
[4] 曾婷,華宇,黃長江,等. 基于mega128單片機的IRIG-B(DC)解調研究[J].儀器儀表科學,2008,29(8): 334-337.
[5] 梁化翰,朱良銥,張立.大學物理實驗[M].上海:上海交通大學出版社,1996.
[6] 于治會.落體法測定構件慣性矩的幾個問題[J].上海航天,2002(2):57-62.
[7] 李季蘇,吳振嵩.測試單軸氣浮臺轉動慣量的一種方法[J].航天控制,1994(3):60-73.
[8] 楊輝,洪嘉振,余征躍.測量單軸氣浮臺轉動慣量的新方法[J].振動與沖擊,2001,20(2):32-34.
[9] 宋海波.基于RF無線射頻芯片的通信技術在分布式網絡傳感器中的應用[D].吉林:吉林大學,2006.
[10] 周東明,劉烈昭.多基地雷達同步系統[J].航天電子對抗,2004(2):46-49.
[11] Jodice J A. End-to-End transient simulation for protection system performance testing [C]. International Conference on Electrical Power System Protection and Local Control,Beijing:1994.
劉寅琛(碩士研究生),主要研究方向為機械電子工程。

Liu Yinchen1, Cui Jian2, Wang Liang1,2
(1. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China;2. Engineering Training Center, Beihang University)
In order to measure the angular momentum of rotating components on the test-bed, we need to measure some physical quantities such as rotating speed, rotating angle and rotational inertia.Therefore, this paper designs the test system of single-axis air bearing test-bed, describes the massive structure of the test system and the method of measuring, introduces the design of hardware and software of each module in the system, and focuses on the time synchronization method of the correlative data on the test-bed and under the test-bed. The system is made up of brief equipments, and it can achieve high precision of data measurement and high time synchronization precision of correlative data.
single-axis air bearing test-bed; test system; angular momentum measurement; time synchronization
TP274.2
A
迪娜
2013-10-17)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
