基于集成溫度傳感器的硅微陀螺儀數(shù)字化溫度補償研究*
2014-09-06 10:47:20柳小軍袁安富王行軍
傳感技術(shù)學(xué)報 2014年6期
關(guān)鍵詞:信號
柳小軍,楊 波,袁安富,趙 輝,王行軍
(1.南京信息工程大學(xué)信息與控制學(xué)院,南京 210044;2.東南大學(xué)儀器科學(xué)與工程學(xué)院,南京 210096;3.東南大學(xué)微慣性儀表與先進(jìn)導(dǎo)航技術(shù)教育部重點實驗室,南京 210096;4.南京理工大學(xué)自動化學(xué)院,南京 210094)
?
基于集成溫度傳感器的硅微陀螺儀數(shù)字化溫度補償研究*
柳小軍1,2,楊 波2,3*,袁安富1*,趙 輝2,4,王行軍2,3
(1.南京信息工程大學(xué)信息與控制學(xué)院,南京 210044;2.東南大學(xué)儀器科學(xué)與工程學(xué)院,南京 210096;3.東南大學(xué)微慣性儀表與先進(jìn)導(dǎo)航技術(shù)教育部重點實驗室,南京 210096;4.南京理工大學(xué)自動化學(xué)院,南京 210094)
提出了一種基于集成溫度傳感器的硅微陀螺儀數(shù)字化溫度補償方法。首先,介紹了集成溫度傳感器的硅微陀螺儀基本結(jié)構(gòu)原理,分析了硅微陀螺儀動力學(xué)方程以及溫度變化對硅微陀螺儀諧振頻率、品質(zhì)因數(shù)、標(biāo)度因數(shù)和零偏的影響。然后,設(shè)計了基于FPGA的硅微陀螺儀數(shù)字化補償電路。最后,經(jīng)過溫度特性實驗得到標(biāo)度因數(shù)和零偏隨溫度變化曲線,建立了溫度補償模型,提出分段溫度補償方法。經(jīng)過溫度補償后,標(biāo)度因數(shù)和零偏的溫度系數(shù)分別由316.66×10-6/℃和366.22°/(h·℃)減小為69.67×10-6/℃和115.25°/(h·℃),證明了補償方法的正確性和可行性。
硅微陀螺儀;零偏;標(biāo)度因數(shù);溫度補償;FPGA
基于MEMS技術(shù)的硅微陀螺儀具有體積小、重量輕、價格低、壽命長和易批量生產(chǎn)等優(yōu)點,因此其在很多領(lǐng)域都得到了廣泛的應(yīng)用[1-3]。硅微陀螺儀的性能受到各種因素的影響,其中溫度的變化對硅微陀螺儀性能有較大影響,硅微陀螺儀的尺寸結(jié)構(gòu)、材料的彈性模量以及陀螺檢測電路中電子器件的性能都會隨溫度的改變而變化,主要影響到硅微陀螺儀的標(biāo)度因數(shù)和零偏,進(jìn)而影響了陀螺儀輸出特性的精度以及穩(wěn)定性[4-6]。
本文以集成溫度傳感器的硅微陀螺儀為對象,設(shè)計了基于FPGA的溫度補償系統(tǒng),該系統(tǒng)通過硅微陀螺儀溫度實驗將建立的溫度補償模型存儲在FPGA芯片相關(guān)的存儲器中,然后FPGA芯片通過實時測量陀螺儀的工作溫度,計算出相應(yīng)溫度的補償值,從而實時跟蹤溫度的變化減小硅微陀螺儀標(biāo)度因數(shù)和零偏隨溫度的變化趨勢。
1 溫度對硅微陀螺儀的影響
1.1 集成溫度傳感器的硅微陀螺儀結(jié)構(gòu)原理
集成溫度傳感器的硅微陀螺結(jié)構(gòu)原理如圖1所示,該結(jié)構(gòu)主要包括陀螺結(jié)構(gòu)、溫度傳感器(鉑電阻)。該陀螺結(jié)構(gòu)利用集成在陀螺內(nèi)部的溫度傳感器實時監(jiān)控表頭內(nèi)部的溫度,通過電路將實時溫度讀入,然后進(jìn)行溫度補償,計算出補償值,由于集成的溫度傳感器靈敏度高、重復(fù)性好,易于集成化[7],可實現(xiàn)較好溫度補償。

圖1 集成溫度傳感器的硅微陀螺結(jié)構(gòu)原理
硅微陀螺儀的機(jī)械結(jié)構(gòu)運動可以分為驅(qū)動和檢測模態(tài),每個模態(tài)在它的振動方向均可以看作彈簧——質(zhì)量塊——阻尼構(gòu)成的二階系統(tǒng)在外力作用下的振動行為[8],其簡化模型如圖2所示。根據(jù)牛頓第二定律,硅微陀螺儀在驅(qū)動模態(tài)和檢測模態(tài)的運動可以由以下力學(xué)方程表示:
(1)
(2)


圖2 硅微陀螺儀簡化模型
1.2 溫度對硅微陀螺儀的影響
硅微陀螺儀以薄硅片為材料,利用半導(dǎo)體加工技術(shù)制作而成,在溫度變化時,結(jié)構(gòu)熱應(yīng)力以及硅材料楊氏模量的變化會影響系統(tǒng)剛度,而硅微陀螺的諧振頻率隨系統(tǒng)剛度改變而變化,因此,溫度的變化會導(dǎo)致陀螺諧振頻率產(chǎn)生漂移[9]。彈性模量與溫度變化的關(guān)系可表示為:
E(T)=E0[1-α(T-T0)]
(3)
式中E(T),E0分別是硅材料在溫度為T,T0時的彈性模量,α是彈性模量的溫度系數(shù),系統(tǒng)的剛度與彈性模量成正比:
k(T)=k0[1-α(T-T0)]
(4)
式中k(T),k0分別是硅材料在溫度為T,T0時系統(tǒng)的剛度。在溫度T0附近的小范圍內(nèi)時,諧振頻率與溫度線性近似關(guān)系可表示為:
ω(T)=ω0[1-1/2α(T-T0)]
(5)
式中ω(T),ω0分別是溫度為T,T0時的諧振頻率,由于溫度影響諧振頻率產(chǎn)生的漂移,對陀螺驅(qū)動以及檢測模態(tài)均有影響,從而影響信號的輸出,降低陀螺儀的零偏穩(wěn)定性和精度。
硅微陀螺儀的品質(zhì)因數(shù)是反映其性能的重要參數(shù)之一[10],實驗采用的是真空封裝硅微陀螺儀,在氣壓處于稀薄空氣阻尼為主要阻尼的氣壓范圍內(nèi)時,系統(tǒng)的品質(zhì)因數(shù)為:

(6)
式中,R為廣義氣體摩爾常數(shù),ω0為諧振頻率,h為極板厚度,ρ為極板密度,M為氣體摩爾質(zhì)量,T為溫度。在真空封裝陀螺儀內(nèi),氣體體積一定,根據(jù)查爾定律,P/T=C,P為壓強,C為常數(shù),由式(6)可知,當(dāng)溫度上升時,品質(zhì)因數(shù)Q下降,呈負(fù)相關(guān)關(guān)系。
1.3 溫度對標(biāo)度因數(shù)和零偏的影響
諧振頻率和品質(zhì)因數(shù)是影響硅微陀螺儀性能的重要參數(shù),標(biāo)度因數(shù)和零偏是反映硅微陀螺儀性能的重要指標(biāo),其受溫度影響較大[11-12]。標(biāo)度因數(shù)是輸出信號與輸入角速度的比值。根據(jù)方程(1)、(2),假設(shè)驅(qū)動力Fd=Asin(ωdt+φ),ωd是驅(qū)動頻率,則兩模態(tài)位移分別表示為:
x(t)=Asin(ωdt+φ)
(7)
(8)

(9)
則標(biāo)度因數(shù)SF可表示為:

(10)
同樣,零偏溫漂主要由正交誤差造成,假設(shè)正交信號yq(t)=Aqsin(ωdt+φ+θ),Aq為正交信號幅度,經(jīng)過解調(diào)、低通濾波后,得零偏信號:

(11)
根據(jù)式(10)、式(11)所示,影響標(biāo)度因數(shù)和零偏的主要因素是兩模態(tài)的諧振頻率以及解調(diào)后的相位差,由1.2節(jié)可知諧振頻率受溫度影響較大,檢測模態(tài)輸出信號幅度、解調(diào)后的相位差以及電路元件參數(shù)都會隨著溫度的變化而發(fā)生改變。因此,標(biāo)度因數(shù)和零偏亦受溫度變化的影響,隨著溫度變化,硅微陀螺儀性能變化明顯,因而有必要進(jìn)行溫度補償研究。
2 基于FPGA的數(shù)字化溫度補償方法
根據(jù)溫度對硅微陀螺儀的影響,設(shè)計硅微陀螺儀測控電路如圖4所示,陀螺驅(qū)動回路采用鎖相環(huán)閉環(huán)驅(qū)動方式,驅(qū)動位移信號x(t)被轉(zhuǎn)換成電容信號經(jīng)過高精度AD轉(zhuǎn)換讀入FPGA中,進(jìn)行數(shù)字IIR濾波后,將提取到的幅度信息和相位信息相乘進(jìn)入DA中,經(jīng)過驅(qū)動放大電路驅(qū)動表頭,實現(xiàn)閉環(huán)驅(qū)動[13]。檢測環(huán)路采用開環(huán)檢測,同樣,檢測位移y(t)被轉(zhuǎn)換成電容信號經(jīng)過高精度AD轉(zhuǎn)換得到Vsa,與采集到的表頭溫度信息經(jīng)過標(biāo)度因數(shù)補償模塊,進(jìn)行標(biāo)度因數(shù)補償后與基準(zhǔn)信號Vref(t)=cos(ωdt+φ)解調(diào)得到哥氏信號Bias1,然后通過零偏補償模塊以及低通濾波后得到零偏信號Bias。
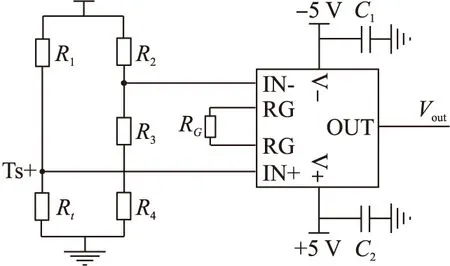
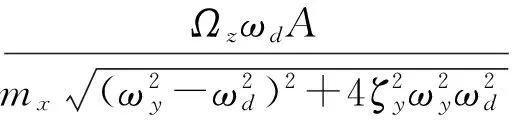
圖3 陀螺儀溫度測量電路原理圖
表頭溫度采用電阻橋電路,經(jīng)過差分放大器和AD讀入FPGA中采集出來,設(shè)計溫度傳感器電路如圖3所示,表頭溫度與溫度傳感器(鉑電阻)關(guān)系為
RT=R0(1+βT)
(12)
式中RT、R0分別為溫度在T℃、0 ℃對應(yīng)的鉑電阻值,在設(shè)定不同溫度點,測出鉑電阻RT,硅微陀螺儀實際溫度系數(shù)標(biāo)定數(shù)據(jù)如表1所示,經(jīng)過計算得到鉑電阻溫度系數(shù)β=2.183×10-3Ω/℃。R1=R2=5 kΩ,R3=500 Ω,R4=25 Ω,RG=9.1 kΩ,則讀入AD的溫度電壓量V與表頭溫度關(guān)系為:
(13)
式中,A=16為差分放大器放大倍數(shù)。

圖4 硅微陀螺儀測控電路原理圖
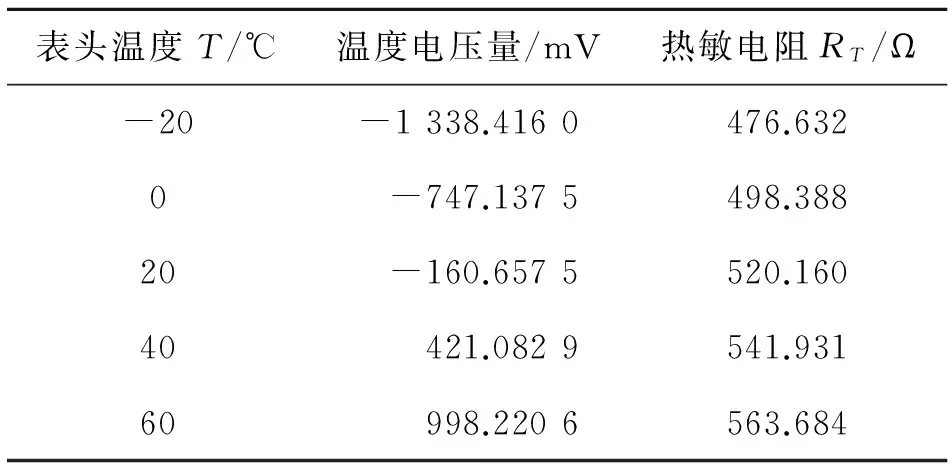
表1 不同溫度點硅微陀螺儀標(biāo)定數(shù)據(jù)
標(biāo)度因數(shù)補償模塊會影響零偏溫度性能,而零偏補償不會影響標(biāo)度因數(shù),因此在電路實現(xiàn)中,首先進(jìn)行標(biāo)度因數(shù)補償,然后再對零偏進(jìn)行溫度補償。在標(biāo)度因數(shù)補償模塊中,把檢測幅度與補償值相除后,則檢測位移信號相對縮小,而在數(shù)字實現(xiàn)過程中,保證數(shù)字信號有效位的前提下,通過截斷數(shù)據(jù)位的方式進(jìn)行縮放,保證檢測位移信號基本不變后作為解調(diào)信號。
3 實驗和結(jié)果
為了研究溫度對硅微陀螺標(biāo)度因數(shù)和零偏的影響,進(jìn)行溫度實驗,根據(jù)測控電路原理,設(shè)計電路實物如圖5所示。將電路放入溫控箱內(nèi),在常溫狀態(tài)下上電,升溫至60 ℃,然后每次降溫20 ℃直至-20 ℃。在各個設(shè)定溫度點穩(wěn)定后,然后采集零偏輸出1 h,再測量標(biāo)度因數(shù)。標(biāo)度因數(shù)和零偏溫度系數(shù)分別為316.66×10-6和366.22°/(h·℃),零偏溫度曲線呈現(xiàn)較復(fù)雜的非線性關(guān)系。
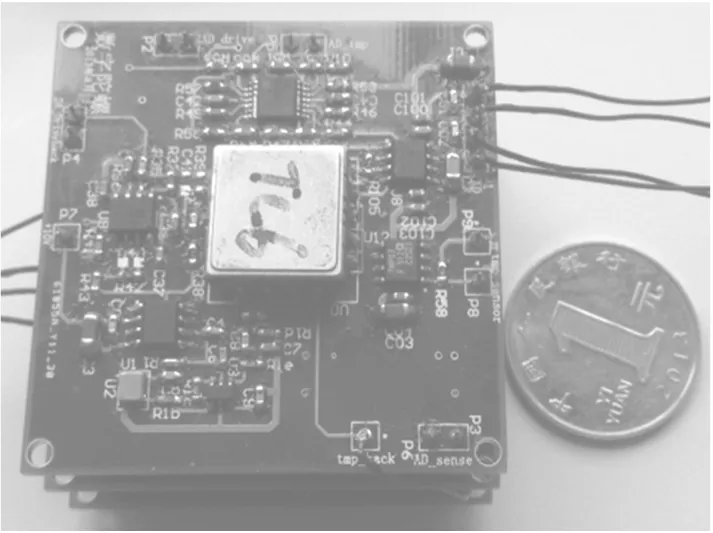
圖5 硅微陀螺儀測試電路實物
根據(jù)補償前標(biāo)度因數(shù)與溫度變化的關(guān)系,采用最小二乘法對標(biāo)度因數(shù)進(jìn)行分段補償,建立標(biāo)度因數(shù)溫度模型SF=aT+b,檢測模態(tài)AD輸出信號Vsa,標(biāo)度因數(shù)補償后輸出信號:

(14)
式中a、b為擬合系數(shù),SF為擬合得到的標(biāo)度因數(shù),T為采集到的表頭實際溫度,則表2為標(biāo)度因數(shù)分段補償擬合系數(shù)a和b。

表2 標(biāo)度因數(shù)分段補償擬合系數(shù)a和b
同樣,根據(jù)補償前零偏與溫度的變化關(guān)系,建立零偏溫度模型Bias2=c·T+d,零偏信號補償后輸出信號為Bias=Bias1-c·T-d,式中c,d為擬合系數(shù),T為采集到的表頭實際溫度,采用最小二乘法對零偏進(jìn)行分段補償,表3為零偏分段補償擬合系數(shù)c和d。
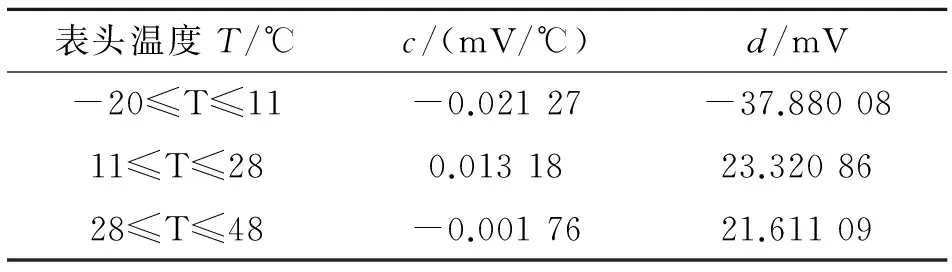
表3 零偏分段補償擬合系數(shù)c和d
將溫度補償模型存儲在FPGA芯片相關(guān)的存儲器中,FPGA芯片通過實時測量陀螺儀的工作溫度,計算出相應(yīng)溫度的補償值進(jìn)行補償,分段補償前后以及使用外部傳感器溫度補償所測標(biāo)度因數(shù)和零偏對比如圖6所示。
與補償前的狀態(tài)相比,補償后在全溫范圍內(nèi)標(biāo)度因數(shù)和零偏性能都有較大提高,標(biāo)度因數(shù)和零偏溫度系數(shù)分別變?yōu)?9.67×10-6/℃和115.25°/(h·℃),標(biāo)度因數(shù)和零偏溫度系數(shù)分別減小3.5倍和2.2倍,而采用外部溫度傳感器補償,標(biāo)度因數(shù)和零偏溫度系數(shù)分別變?yōu)?54.97×10-6/℃和172.67°/(h·℃),與外部傳感器補償相比較,集成溫度傳感器補償效果顯著。
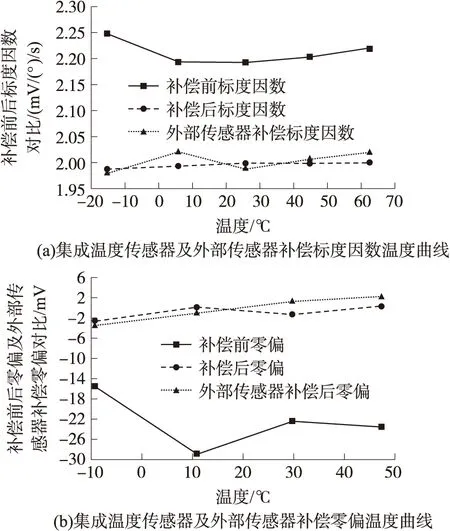
圖6 補償前后標(biāo)度因數(shù)和零偏溫度曲線
4 結(jié)論
本文研究了一種基于FPGA的硅微陀螺儀溫度補償?shù)姆椒?首先介紹了集成溫度傳感器的硅微陀螺儀結(jié)構(gòu),分析了硅微陀螺儀的基本工作原理以及溫度變化對陀螺諧振頻率、標(biāo)度因數(shù),零偏的影響,然后設(shè)計了陀螺數(shù)字測控電路,最后進(jìn)行了實驗以及實驗結(jié)果的分析與總結(jié)。通過補償,標(biāo)度因數(shù)和零偏溫度系數(shù)分別減小3.5倍和2.2倍,證明了該補償方法的有效性,明顯優(yōu)化了陀螺的溫度特性。
[1] 程龍,王壽榮,葉甫.硅微機(jī)械振動陀螺零偏溫度補償研究[J].傳感技術(shù)學(xué)報,2008,21(3):483-485.
[2]滿海鷗,肖定邦,吳學(xué)忠,等.基于驅(qū)動頻率的硅微陀螺零偏補償方法研究[J].傳感技術(shù)學(xué)報,2012,25(5):624-627.
[3]曹慧亮,李宏生,王壽榮,等.硅微機(jī)械陀螺儀測控電路的溫度補償[J].光學(xué)精密工程,2013,21(12):3118-3125.
[4]陳懷,張嶸,周斌,等.微機(jī)械陀螺儀溫度特性及補償算法研究[J].傳感器技術(shù),2004,23(10):24-26.
[5]顧廣清,夏敦柱,李宏生,等.硅微陀螺儀數(shù)字化溫度補償系統(tǒng)的實現(xiàn)[J].船艦電子工程,2008,12(28):49-52.
[6]Jiancheng F,Jianli L.Integrated Model and Compensation of Thermal Errors of Silicon Microelectromechanical Gyroscope[J].IEEE Transactions on Instrumentation and Measurement,2009,58(9):2923-2930.
[7]曹慧亮,楊波,徐露,等.MEMS陀螺儀芯片級溫控系統(tǒng)的設(shè)計[J].東南大學(xué)學(xué)報(自然科學(xué)版),2013,43(1):55-59.
[8]張祺煒.雙線振動硅微機(jī)械陀螺儀數(shù)字化測控技術(shù)研究[D].南京:東南大學(xué),2009.
[9]王玉良,夏墩柱.基于FPGA的硅微陀螺儀零偏溫度補償系統(tǒng)的研究[J].計算機(jī)與數(shù)字工程,2009,37(6):181-184.
[10]陳淑鈴,楊波,王壽榮.Z軸硅微機(jī)械陀螺儀溫度特性研究[J].電子器件,2008,31(6):1753-1756.
[11]吳峰,王向軍,湯其劍.基于數(shù)字調(diào)節(jié)方法的MEMS陀螺零位補償技術(shù)研究[J].傳感技術(shù)學(xué)報,2012,25(12):1717-1721.
[12]夏敦柱,王壽榮,周百令.硅微陀螺儀零偏溫度性能補控方法設(shè)計[J].東南大學(xué)學(xué)報,2012,42(2):290-294.
[13]夏國明.基于數(shù)字技術(shù)的硅微陀螺儀性能穩(wěn)定性研究[D].南京:東南大學(xué),2011.
柳小軍(1989-),男,江蘇東臺人,碩士研究生,主要從事微系統(tǒng)測控技術(shù)方面的研究,liuxiaojun0814@126.com;

楊波(1979-),男,湖北潛江人,副教授,碩士生導(dǎo)師,主要從事微機(jī)電系統(tǒng)理論及應(yīng)用的研究,yangbo20022002@163.com;

袁安富(1964-),男,浙江嵊州人,教授,碩士生導(dǎo)師,研究方向為CAE,charles-yuan@163.com。
ResearchonDigitalTemperatureCompensationofSiliconMicroGyroscopeBasedonIntegratedTemperatureSensor*
LIUXiaojun1,2,YANGBo2,3*,YUANAnfu1*,ZHAOHui2,4,WANGXingjun2,3
(1.School of Information and Control,Nanjing University of Information Science and Technology,Nanjing 210044,China;2.School of Instrument Science and Engineering,Southeast University,Nanjing 210096,China;3.Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology,Ministry of Education,Southeast University,Nanjing 210096,China;4.School of Automation,Nanjing University of Science and Technology,Nanjing 210094,China)
A digital temperature compensation method was proposed based on integrated temperature sensor for the silicon micro gyroscope.First,the structure of the gyroscope with integrated temperature sensor was discussed.And the dynamics equations and effect of temperature variation to the resonant frequency,quality factor,scale factor and zero bias for the silicon micro gyroscope was analyzed.Then,the digital circuit was designed based on the FPGA.Finally,the relation between scale factor and temperature was acquired by the experiments of temperature characteristics,the compensation model was established and the temperature compensation is implemented.Through the compensation method proposed,the temperature coefficients of the scale factor and zero bias decrease from 316.66×10-6/℃ and 366.22°/(h·℃)to 69.67×10-6/℃ and 115.25 °/(h·℃)respectively.The results exposed that the method is correct and feasible.
silicon micro gyroscope;zero bias;scale factor;temperature compensation;FPGA
項目來源:國家自然科學(xué)基金項目(61104217,U1230114)
2014-02-20修改日期:2014-05-22
10.3969/j.issn.1004-1699.2014.06.012
V241.5
:A
:1004-1699(2014)06-0770-05
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06