一種無振蕩誤差的車載慣導系統測姿方法*
2014-09-06 10:48:05李瑞豹閆慧芳
傳感技術學報 2014年12期
孫 偉,丁 偉,于 婷,李瑞豹,閆慧芳
(遼寧工程技術大學測繪與地理科學學院,遼寧 阜新 123000)
?
一種無振蕩誤差的車載慣導系統測姿方法*
孫 偉*,丁 偉,于 婷,李瑞豹,閆慧芳
(遼寧工程技術大學測繪與地理科學學院,遼寧 阜新 123000)
車載GPS/INS組合導航系統中的衛星信號易受環境影響出現失鎖,而慣導獨立工作時處于無阻尼狀態,其特有的機械編排導致解算的姿態信息中存在舒勒振蕩和傅科振蕩誤差,因此無法滿足測量系統對姿態信息的高精度需求。為此,提出一種基于羅經方案的無振蕩誤差的車載慣導姿態確定方法,通過將加速度計測量的載體運動加速度進行低通濾波處理,引入慣性坐標系并間接地建立載體與導航坐標系之間的姿態轉換矩陣,改變慣導無阻尼解算模式并實現系統無振蕩性誤差的姿態信息的求解。試驗結果表明,論文提出的無振蕩誤差測姿方法具有為車載平臺提供準確姿態信息的可行性與可靠性。
移動測量;慣導系統;姿態;振蕩誤差
移動測量系統廣泛地應用于數字城市建設及公路交通監管等服務行業[1-2],基于GPS/INS的組合導航系統作為移動測量系統的主要姿態測量設備可為其提供高精度的三維姿態信息[3-5]。對于開闊的戶外工作環境,GPS/INS組合系統可滿足基本的姿態測量需求,但是對于隧道、井下或市區等特殊工種環境下,衛星信號易受干擾引起信息不連續或是完全被屏蔽進而導致組合導航系統只能工作于單一慣導模式[6-7]。純慣導由于其特有的機械編排特性將處于無阻尼狀態,由于重力加速度與水平解算回路的耦合導致解算的姿態信息中存在舒勒周期和傅科周期等振蕩性誤差[8]。對于采用中等精度慣性器件的導航系統而言,符合測量精度要求的獨立工作時間僅限于幾分鐘甚至幾十秒以內[9-10]。為解決移動測量慣導系統姿態解算過程中面臨的上述問題,筆者結合捷聯慣性導航技術的最新發展現狀,提出一種無周期性振蕩誤差的移動測量慣導系統姿態確定方法,并進行試驗分析與驗證。
1 無振蕩誤差姿態解算原理
為避免傳統慣導系統采用的基于導航坐標系系(n系)的姿態求解過程中,由于重力加速度與水平回路耦合而引起振蕩性誤差,在慣導系統對準結束后,設計了在赤道平面慣性坐標系(i系)下實現姿態信息的求取。陀螺儀具有測量任意瞬間包括地球自轉運動和載體旋轉的角運動信息能力,通過系統中積分作用可計算出載體相對慣性空間角姿態;加速度計輸出包含載體線加速度和當地的重力加速度,經坐標轉換和濾波處理后,可以得到相對慣性空間的重力慢漂變化過程。而慣性空間中的重力確定了一個主軸與地球旋轉軸一致的錐體(如圖1),從而可進一步確定地理北向并實現載體姿態的求取。
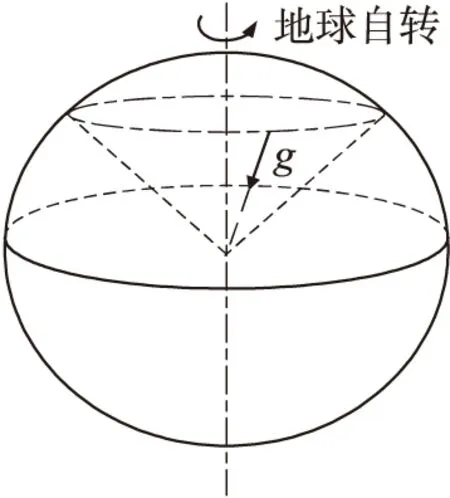
圖1 重力矢量相對慣性空間慢漂示意圖
1.1 陀螺旋轉速率積分過程姿態矩陣初值的確定
設慣導系統初始對準結束時載體所在位置的緯度為L,根據圖2所示導航坐標系與慣性坐標系的相對位置關系,將導航坐標系相對xn軸旋轉90-L度得到慣性坐標系,兩坐標系的轉換矩陣可表示為:
(1)
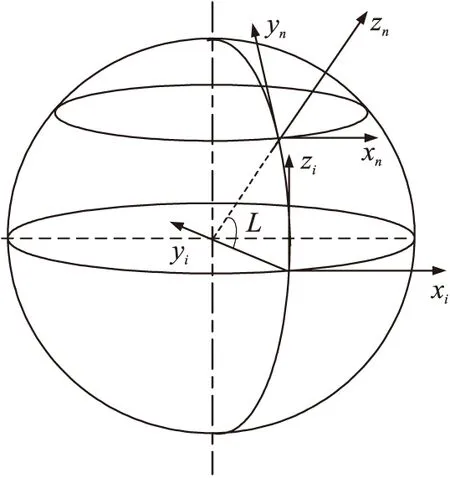
圖2 導航坐標系與慣性坐標系的轉換示意圖
(2)
式(2)的計算結果用于陀螺儀測得的旋轉速率在慣性空間進行積分的初始信息:
(3)

1.2 載體姿態信息求取
載體處于靜基座環境時,加速度計測得的比力fb與重力矢量gb近似相等,此時可將加速度計輸出直接投影在慣性坐標系:
(4)
(5)
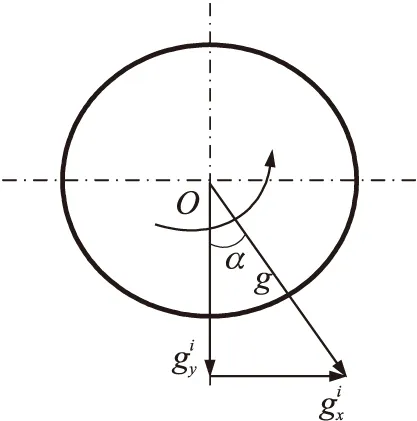
圖3 重力慢漂在赤道平面投影示意圖
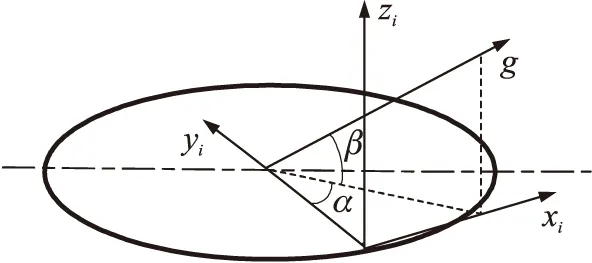
圖4 重力矢量與慣性系相對角位置
由漂移角度α可確定重力矢量相對慣性系在赤道平面的旋轉矩陣:
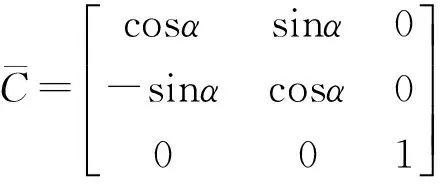
(6)
根據圖4所示重力矢量在子午圈的變化規律,得到重力矢量與赤道平面的夾角β:
(7)
由于加速度計敏感的重力矢量存在測量誤差,β與測量載體所在緯度φ存在小角度誤差,得到旋轉矩陣為:
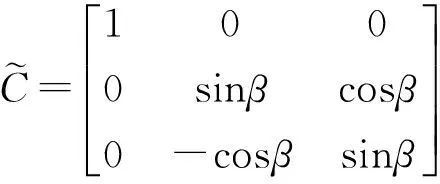
(8)
由重力矢量相對慣性系的夾角α、β可確定慣性坐標系到導航坐標系的旋轉矩陣:
(9)
(10)
利用捷聯矩陣與載體姿態角的轉換關系,可實時確定載體姿態信息。

2 重力加速度提取
2.1 慣性系內開展重力提取的原因及方法
載體機動引起的擾動誤差以及器件噪聲是導致加速度fb劇烈變化的主要原因。即使載體不受擾動加速度影響只存在重力加速度時,重力矢量在載體坐標系中的投影也會隨著載體的運動而變化,且變化不具規律性。所以難以設計可行的濾波方案在載體坐標系內完成對重力矢量的提取。針對如上問題,根據分析得到重力矢量在慣性系內作圓錐慢漂運動的特點,提出在慣性系內對重力矢量進行提取。
加速度計測量的載體加速度在慣性系上的投影可表示為:
(11)

圖5顯示出重力矢量g在慣性系的變化處于低頻段,該結果可為巴特沃斯低通濾波器的設計提供依據。
2.2 小波降噪方案設計
結合圖5所示的加速度頻譜分析結果,加速度計輸出信號中隨機噪聲與外界干擾多分布于高頻部分,應用小波降噪具有多分辨率的特點可有效的將信號分解為高頻部分和低頻部分從而達到分離噪聲的效果。而且相對于數字濾波,小波分析具有能夠對信號進行局部分解和處理,具有多層細化的優勢。它提供的自適應時域和頻域同時局部化的分析方法,無論分析低頻還是高頻局部信號,都能自動調節時-頻窗,以適應實際分析的需要。因而在對慣性器件進行小波降噪處理時,既能有效剔除高頻噪聲,又能完整保留高頻有用信號,且不存在收斂時間延遲的現象。
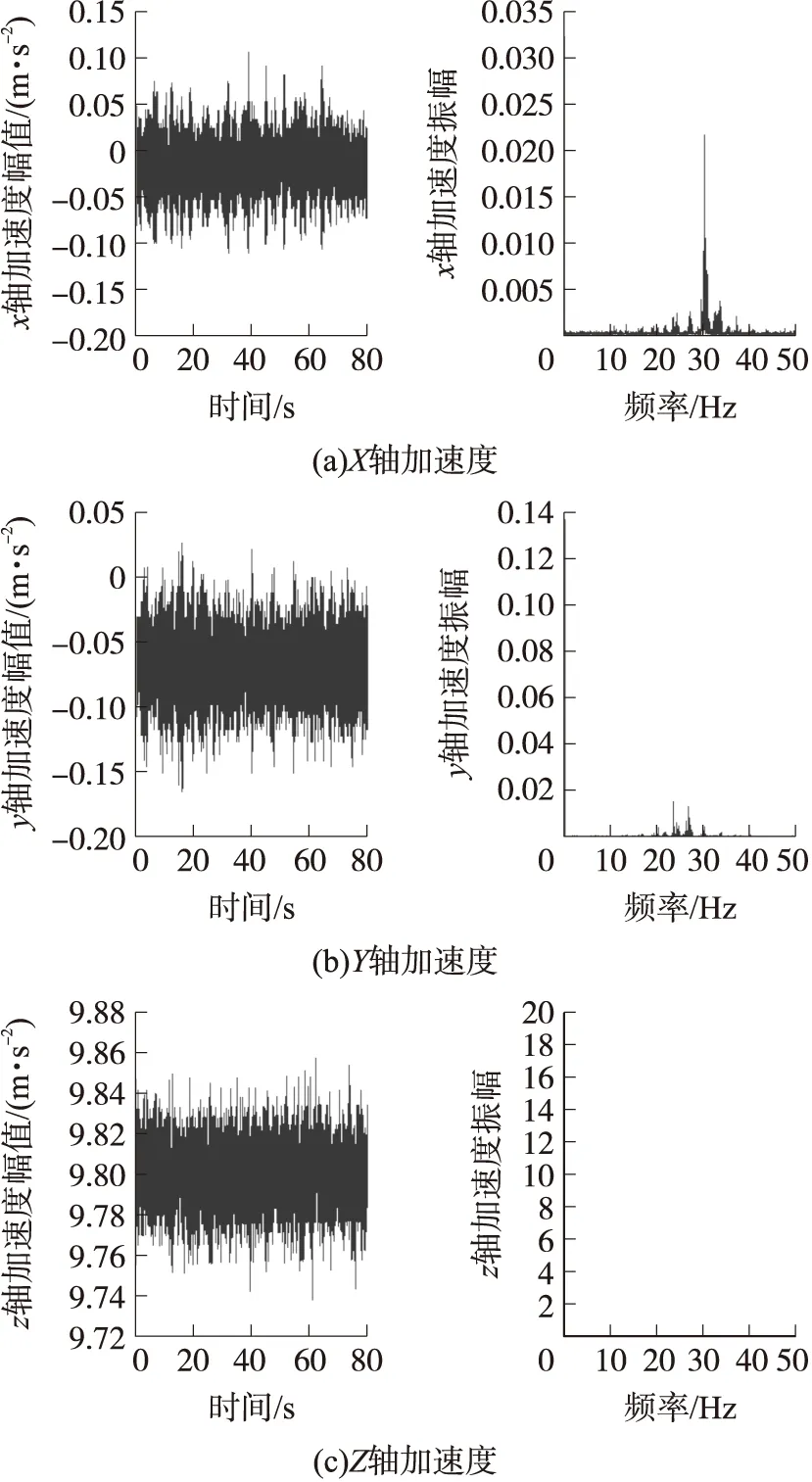
圖5 某次車載試驗加速度信息及其頻譜分布
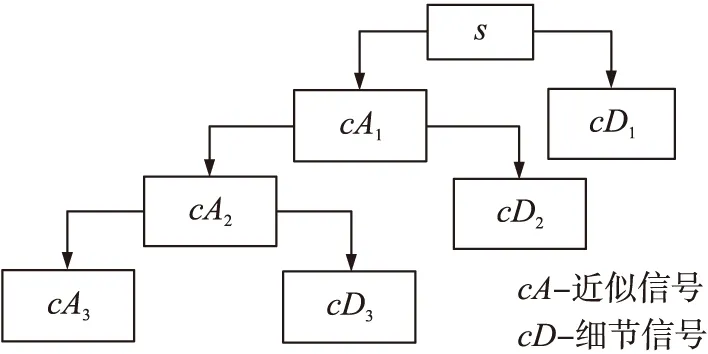
圖6 小波分解結構圖
小波降噪的執行過程可分為:信號分解、閾值處理和信號重構3個環節。
①信號分解過程如圖6所示。
其中,cAi(i=1,2,3)和cDi(i=1,2,3)分別表示小波分解從第2層開始對上一層分解所得的低頻分量繼續分解后得到的低頻分量和高頻分量。
②在對慣性器件信號進行小波降噪時采用軟閾值方法,其原理是將慣性器件高頻信號小于閾值的部分置零,對于絕對值大于閾值的部分則輸出其與閾值的差值。
③信號小波重構是信號小波分解運算的逆過程,將慣性器件原始信號多層分解后得到的最后一層低頻近似信號cA和經過閾值處理的各層高頻細節信號cD進行重構,得到小波降噪后的重構信號。
經過如上3個步驟的處理可實現慣性器件輸出的降噪處理。
3 實驗結果及分析
3.1 加速度去噪實驗
加速度去噪水平的好壞直接制約著載體姿態解算精度的高低。為驗證論文設計的小波降噪相對傳統數字濾波的優勢[12-13],以及對于濾除加速度計輸出重力以外擾動信息和高頻噪聲有效性,截取某次實驗的加速度數據輸出進行處理。濾波前、后3個加速度計對應的加速度曲線如圖7所示。

圖7 濾波前后加速度對比曲線
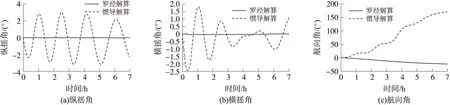
圖9 載體靜止狀態下的姿態對比曲線
對比圖7中濾波前后的加速度曲線可看出:采用小波降噪和數字低通濾波方案都可以濾除3個方向上加速度信息中的高頻噪聲,且濾波后曲線無失真并與原有曲線保持較好的相似性。但是,經過對比分析圖7(b)和圖7(c)可看出,數字濾波方法存在較明顯的收斂過程和時間延遲現象,這個過程的存在將對慣導系統初始對準精度和快速性產生影響,采用小波降噪后得到的結果無收斂過程而且具有較好的跟隨特性,該結果可直接用于載體姿態轉換矩陣的求取。
3.2 姿態解算對比實驗
為驗證本文提出的基于羅經技術的無振蕩誤差姿態求取方案的可行性與可靠性,分別開展實驗室內靜基座環境下的轉臺實驗和戶外跑車實驗。
將LCI慣導系統安裝于三軸慣性測試轉臺的測試中心(如圖8),將轉臺歸零后保持靜止,采集陀螺儀和加速度計輸出。其中,三軸慣性測試轉臺的技術指標與陀螺儀和加速度計的指標參數分別如表1和表2所示。
由于舒勒振蕩周期為84.4 min,為驗證本文提出的無振蕩誤差姿態解算方法的有效性,將陀螺儀和加速度計輸出的數據分別采取傳統慣導解算和羅經方法解算,得到姿態對比曲線(如圖9所示)。
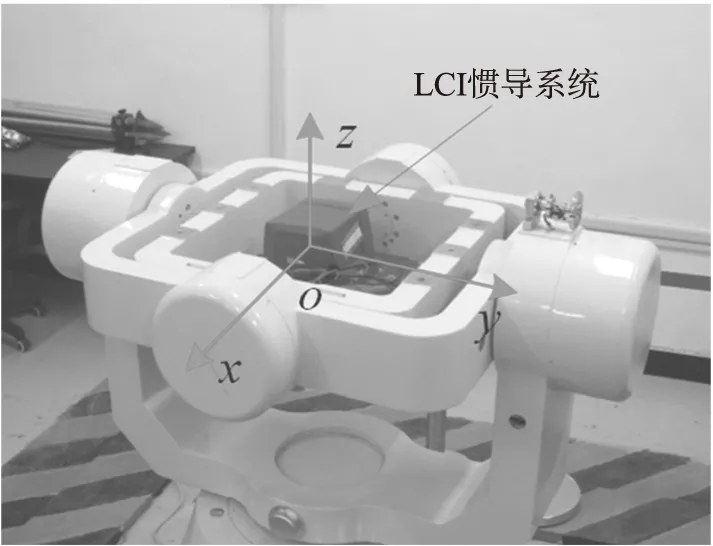
圖8 轉臺實驗
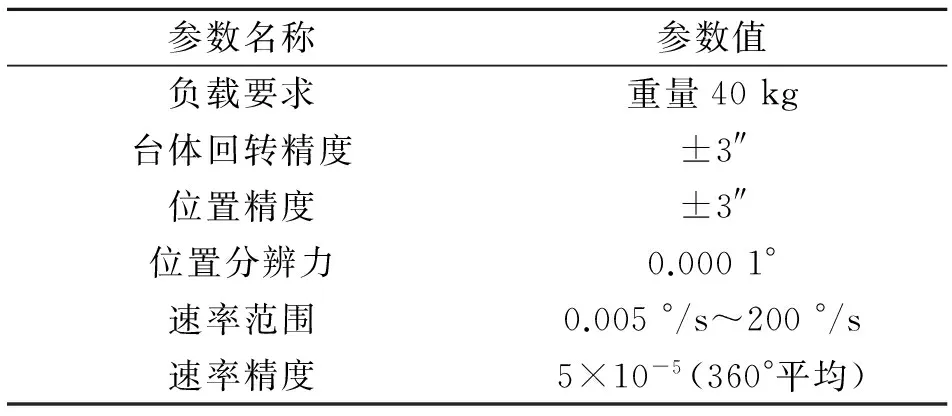
表1 三軸慣性測試轉臺技術參數
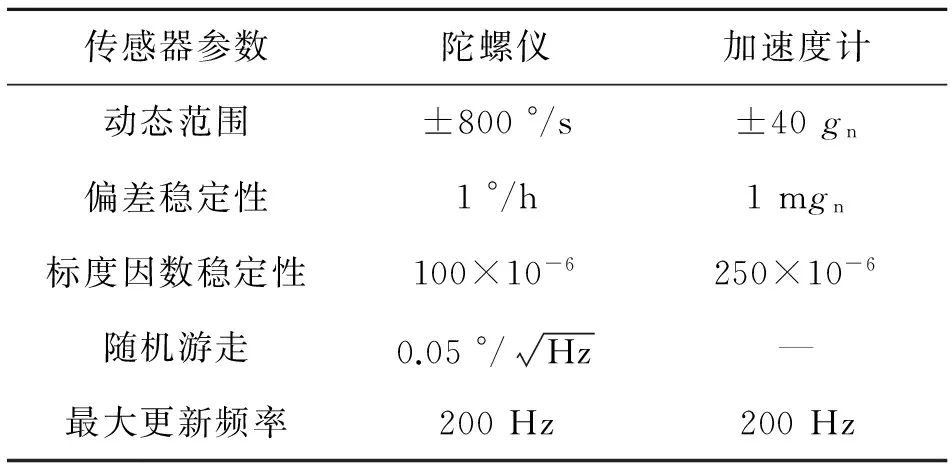
表2 陀螺儀與加速度計性能指標
由于慣性測量單元安裝于轉臺測試中心,且實驗過程中轉臺一直處于歸零狀態,因此參考基準提供的三維姿態角度值均為零。對比圖9中不同解算方法提供的姿態曲線可看出,傳統慣導解算得到的姿態角曲線有著明顯的舒勒振蕩周期,該結果符合慣導解算過程的誤差特性;采用羅經方案得到的姿態角無振蕩誤差,特別是水平姿態角誤差不發散且保持在零度左右;航向角經過7 h的實驗,產生了航向偏離,但偏離程度遠遠小于傳統慣導解算得到的結果。這是因為純慣導模式下的組合系統處于無阻尼工作狀態,由于重力加速度與水平回路的耦合引起傳統慣導解算出的姿態信息中包含由舒勒、傅科周期在內的振蕩性誤差,這些誤差是影響系統精度的主要因素。由于本文提出的無振蕩誤差姿態求取方案在求解載體姿態信息時利用重力矢量在慣性系下的慢漂特性間接地完成載體姿態的求取,不存在傳統姿態解算時系統中的周期振蕩回路,因此解算的載體姿態信息中不包含振蕩性誤差。
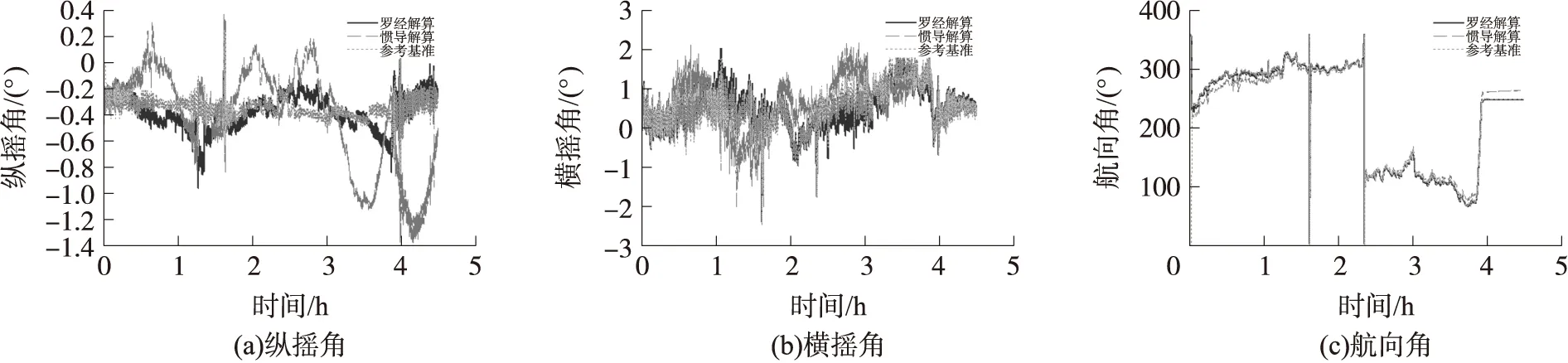
圖11 載體運動狀態下的姿態對比曲線
為進一步驗證羅經方案姿態解算方法對于動態環境下的可行性,開展了4.5 h的戶外行車實驗。選取SPAN-LCI組合導航系統提供的姿態信息作為車載實驗的參考基準(如圖10),在GPS輔助條件下該系統提供的姿態角精度優于0.01°。

圖10 車載實驗平臺
分別采用傳統慣導解算與本文提出的無振蕩周期姿態求取算法對陀螺儀和加速度計輸出的標校后數據進行離線解算,將得到的載體姿態曲線與SPAN-LCI組合導航系統提供的參考姿態進行對比,得到試驗曲線如圖11所示。
對圖11觀測發現,傳統慣導解算方案得到的姿態曲線顯示出較為明顯的周期振蕩特性,特別是縱搖角和橫搖角更為明顯;采用基于羅經方案的無振蕩周期姿態求取算法得到的姿態角曲線與參考基準具有較好的跟隨性,且無振蕩性誤差。得到不同姿態解算方法求取的三維姿態曲線相對參考基準的最大偏離值如表3所示。
該結果可滿足動態測繪對車體姿態精度要求;該實驗結果驗證了基于羅經方案的無振蕩周期姿態求取方法在不同運動狀態下具有較好的可靠性。
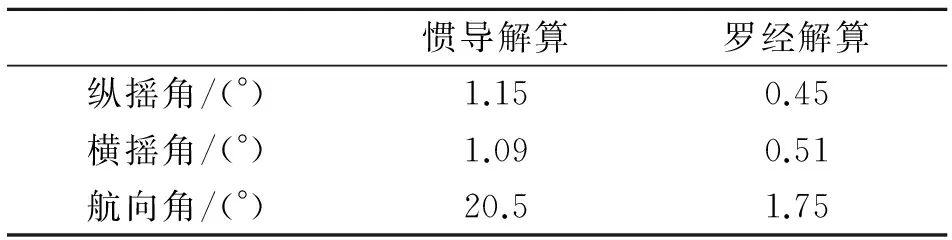
表3 不同姿態求取方法的最大偏離誤差
4 結論
論文提出一種基于無振蕩誤差的測量載體姿態確定方法。該方法利用小波分解對加速度信息進行處理后得到相對純凈的重力矢量,間接地建立姿態矩陣完成對載體姿態信息的求取。該方法避免了純慣導工作模式下系統中存在的周期振蕩回路,因此解算的載體姿態信息中不存在周期振蕩性誤差。利用SPAN-LCI搭建實驗平臺分別開展實驗室轉臺靜基座實驗和戶外車載動態實驗。在不同實驗狀態下,無振蕩誤差和傳統慣導解算方法得到的載體姿態角分別與轉臺或SPAN-LCI組合系統提供的參考姿態信息進行對比,實驗結果驗證了論文提出的基于羅經方案的無振蕩誤差姿態確定方法具有較高的準確性和可靠性。
[1] 馬萬鐘,杜清運. 地理國情監測的體系框架研究[J]. 國土資源科技管理,2011,27(6):104-111.
[2]麥照秋,陳雨,鄭祎,等. IP-S2移動測量系統在高速公路測量中的應用[J]. 測繪通報,2010,12:23-26.
[3]Stutters L,Honghai L,Tiltman C,et al. Navigation Technologies for Autonomous under Water Vehicles[J]. IEEE Transactions on Systems,Man,and Cybernetics,2008,38(4):581-589.
[4]Timofeev E A,Tsekhanovich G S. INS Simulator for Debugging INS/GNSS Data[J]. IEEE Transactions on Aerospace and Electronic System,2009,24(1):38-40.
[5]柴艷菊. 挖掘信息提高GPS/INS導航精度的理論與方法研究[J]. 測繪學報,2010,39(3):328.
[6]Sun W,Gao Y. Fiber-Based Rotary Strapdown Inertial Navigation System[J]. Optical Engineering,2013,52(7):1-12.
[7]孫偉,李婉秋,初婧,等. 基于誤差修正技術的井下人員MEMS定位方法[J]. 傳感技術學報,2014,27(7):898-904.
[8]Levinson E,Willcocks M. The Next Generation Marine Inertial Navigation is Here Now[C]//Proceedings of IEEE Position,Location and Navigation Symposium. 1994:121-127.
[9]陳灣灣,陳智剛,馬林,等. MEMS 微機械陀螺溫度特性分析與建模[J]. 傳感技術學報,2014,27(2):194-197.
[10]宋海賓,楊平,徐立波. MEMS傳感器隨機誤差分析及處理[J]. 傳感技術學報,2013,26(12):1719-1723.
[11]El-Sheimy N,Nassar S. Wavelet De-Noising for IMU Alignment[J]. IEEE Trans Aero Elec Sys,2004,10(1):32-39.
[12]Diniz S R,Silva A B,Netto R. Digital Signal Processing-System Analysis and Design[M]. Cambridge:Cambridge University Press,2002.
[13]Cho S Y,Kim B D. Adaptive IIR/FIR Fusion Filter and Its Application to the INS/GPS Integrated System[J]. Automatica,2008,44(8):2040-2047.

孫偉(1984-),男,教授,博士生導師,黑龍江蘿北縣人。2007年于哈爾濱工程大學獲得學士學位,2011年于哈爾濱工程大學獲得博士學位。主持國家級、省部級科研項目7項;發表學術論文40余篇,其中SCI論文6篇,EI論文20篇。長期從事慣性導航技術研究,sunwei-3775235@163.com;
丁偉(1992-),男,四川省巴中市人。現為遼寧工程技術大學測繪與地理科學學院碩士研究生。長期從事慣性數據處理方法研究。
AttitudeDeterminationMethodforVehicleINSwithoutOscillationError*
SUNWei*,DINGWei,YUTing,LIRuibao,YANHuifang
(School of Geomatics,Liaoning Technical University,Fuxin Liaoning 123000,China)
The GPS signal of integrated navigation system of moving measurement vehicle is easily disturbed by the work environment. The vibration errors of attitude was introduced when the integrated navigation system working on the inertial mode based on special undamped machinery. Therefore,it could not satisfy the requirement of accuracy attitude determination. Then,a novel attitude determination without oscillation error was proposed in this paper. The inertial frame was introduced firstly. Secondly,the acceleration in the inertial frame,proposed by accelerometer and filtered out by low-pass filter,was used to establish the transfer matrix from body frame to navigation frame. Then,the attitude could be calculated by the change of undamped calculation model. Experiment results showed that,the proposed advance strapdown gyrocompass could be used to calculate the vehicle platform attitude effectively.Keywords:mobile measurement;inertial navigation system;attitude;oscillation error
項目來源:國家自然科學基金項目(41304032);高等學校博士學科點專項科研基金項目(20132121120005);遼寧省科技廳博士啟動基金項目(20121084);對地觀測技術國家測繪地理信息局重點實驗室開放基金項目(K201401)
2014-07-18修改日期:2014-10-27
TP212
:A
:1004-1699(2014)12-1666-06
10.3969/j.issn.1004-1699.2014.12.015