地磁傳感器誤差參數估計與補償方法*
2014-09-06 10:48:05龍達峰張曉明溫晶晶
傳感技術學報 2014年12期
關鍵詞:測量
龍達峰,劉 俊,2*,李 杰,張曉明,溫晶晶
(1.中北大學電子測試技術重點實驗室,太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,太原 030051)
?
地磁傳感器誤差參數估計與補償方法*
龍達峰1,劉 俊1,2*,李 杰1,張曉明1,溫晶晶1
(1.中北大學電子測試技術重點實驗室,太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,太原 030051)
地磁傳感器誤差參數通常在事前標定校準,但校準參數在長時間的置放后,或者應用環境的發生改變時,地磁傳感器校準參數將會發生變化,從而造成磁測補償效果并不理想。為期解決上述問題,本文提出了基于濾波技術的地磁傳感器誤差參數估計與補償方法。仿真結果表明該方法是可行的,最為重要的是磁傳感器通過參數估計與磁測補償后,其測量精度最少提高了一個數量級。
地磁傳感器;誤差參數估計;磁測補償;誤差模型;卡爾曼濾波器
地磁傳感器是地磁導航系統的核心敏感器件,其測量精度很大程度決定了地磁導航系統的導航性能。由于傳感器的安裝誤差、信息與數據處理以及載體環境等有害因素的影響,捷聯地磁傳感器不可避免會存在各種測量誤差,進而會影響導航參數的解算精度[1,4]。因此,提高地磁傳感器的測量精度是實現高精度地磁導航的基礎。針對地磁傳感器的校準問題,國內外學者開展很多相關研究工作[5-11],就目前而言,通常采用更高精度的地面標定設備對地磁傳感器進行標定與校準,通過補償方法來提高其測量精度。由文獻[4-5,8]可知,地磁傳感器在標定后長時間置放后,或者應用環境的改變,地磁傳感器的靈敏度和零偏等誤差參數將會發生一定程度的變化,造成事前所得標定參數用于實時數據補償時,其效果并不理想。針對于此,最為理想的方式是實現地磁傳感器的誤差參數準確估計,就可以避免校準參數不準確帶來的測量誤差。地磁傳感器的在線標定方法較為成熟應用主要是在衛星地磁導航領域[9-11]。本文基于上述思想,提出了一種新的地磁傳感器誤差參數濾波估計與補償方法。以期解決上述問題。
1 地磁傳感器測量模型
若三軸地磁傳感器捷聯安裝于載體時,其用于測量載體系內的地磁場矢量信息,地磁傳感器的理想測量輸出為:
(1)
如前所述,捷聯與載體的三軸地磁傳感器存在包括零偏、靈敏度誤差和軸間的交叉耦合誤差在內的多種測量誤差[3-4]。在進行地磁傳感器的標定與補償研究中,通常采用如下表示的測量輸出模型[4,6-7]:
(2)

(3)
上述矩陣中,si(i=x,y,z)即為各軸向磁傳感器的靈敏度誤差;而αx,βx(i=x,y)即為各軸向地磁傳感器的安裝角誤差。而實際上,若αi,βi為小安裝角誤差時,其習慣上被視為各軸間的交叉耦合誤差。因此,系數矩陣K也可簡寫為如下形式:
(4)
實際上,若式(4)表示的誤差系數矩陣進行參數估計時,K中包含各軸間的交叉耦合誤差和安裝角誤差項。因此,本文在進行磁傳感器的誤差參數估計時,采用式(4)表示的系數矩陣。由式(2)可推導得到地磁傳感器的磁測數據誤差補償公式為:
(5)

2 地磁傳感器誤差參數估計方法
若將式(2)進一步整理,可以推導得到如下關系:
(6)
考慮到地磁傳感器已通過事前的校準后,即便是長時間的置放后或應用環境的發生改變時,地磁傳感器的交叉耦合誤差系數也通常變化很小。為簡化分析不對其進行的濾波估計。因此,式(6)中的矩陣D的計算公式可以整理為如下形式:
(7)

(8)
式中,v(t)量測噪聲,假設為零均值高斯白噪聲。
濾波器選取各軸向地磁傳感器的靈敏度誤差和零偏作為系統狀態變量,共6維;并假設各參數是常值,因此,濾波系統的狀態方程可以表示為:

(9)
式中,w(t)過程噪聲,假設為零均值高斯白噪聲。
因此,由觀測方程式(8)和狀態方程式(9)構成了地磁傳感器誤差參數的濾波模型。但由于所建立的觀測方程為非線性模型,卡爾曼濾波算法無法直接應用系統狀態參數估計[12]。因此,本文采用離散擴展卡爾曼濾波結構(EKF)進行算法設計。將系統濾波模型簡寫成如下標準形式:
(10)
式中h[·]對其自變量X(t)而言是非線性關系。
由于EKF濾波算法是線性化處理的濾波方法,因此,對系統模型(10)進行線性化和離散化處理可得:
(11)
式中,狀態轉移矩陣為單位陣:Φk,k-1=I6×6;觀測矩陣Hk是雅可比矩陣,其計算公式為:
(12)
因此,基于離散擴展卡爾曼濾波結構的三軸地磁傳感器誤差參數在線估計算法如下遞推過程[12]:
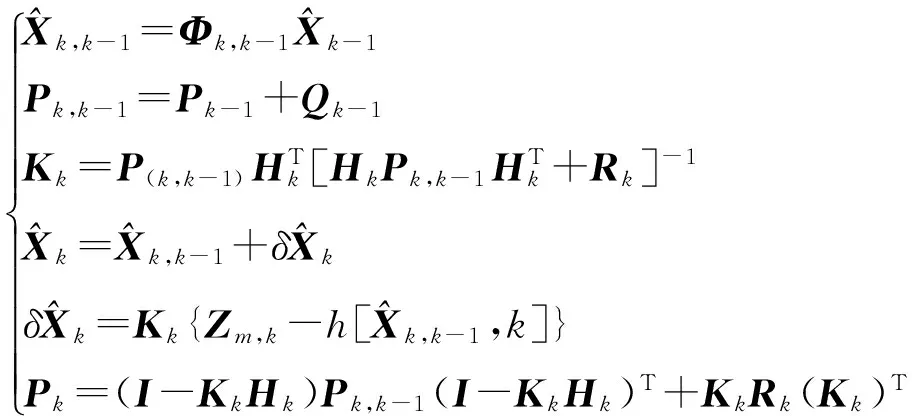
(13)
因此,由上述濾波算法完成磁傳感器誤差參數估計,最終,通過誤差補償式(5)完成磁測數據的在線補償。
3 仿真實驗驗證
本文采用數值仿真實驗驗證方法,首先,利用地磁傳感器的理想輸出模型式(2)仿真生成理想輸出數據。然后,根據地磁傳感器的測量誤模型生成包含有零偏、靈敏度誤差和軸間的交叉耦合誤差在內的多種測量誤差的實際測量輸出數據。在此基礎上,利用上文所述濾波算法進行地磁傳感器誤差參數的在線估計,并進行磁測數據補償性能分析。
3.1 仿真條件
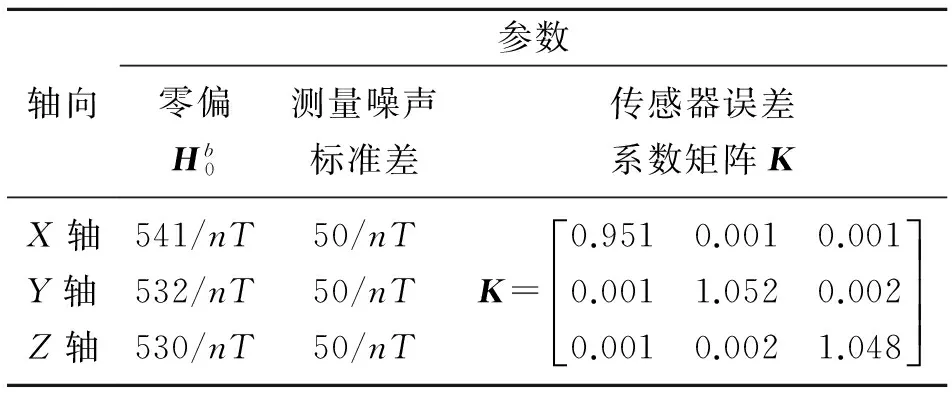
表1 磁傳感器誤差參數設置
②濾波初始條件:
Xk-1=[1,1,1,500,0,0]
P0=diag([1;1;1;500;5 000;5 000])
Qk=diag([1-10;1-101-10;1-10;1-10;1-10]2),
Rk=(1-8)2
3.2 仿真結果
仿真時,濾波器以100Hz頻率進行磁傳感器誤差參數的在線濾波估計。X、Y和Z各軸向地磁傳感器的誤差參數濾波估計結果如圖1~圖6所示。
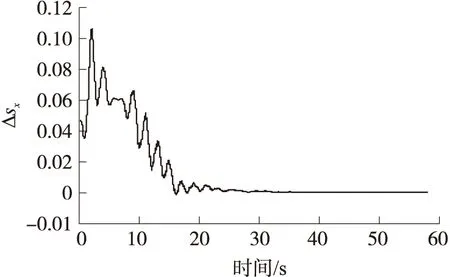
圖1 X軸標度因數估計誤差曲線
①地磁傳感器誤差參數濾波結果
從圖1~圖6濾波估計結果來看,地磁傳感器的零偏和靈敏度誤差參數均能夠很好的收斂。在現有的100 Hz的濾波頻率下,Y和Z軸地磁傳感器的標度因數誤差參數在5 s內收斂,相地而言,X軸收斂速度和估計精度差些。在濾波收斂穩定后,各軸向地磁傳感器的零偏估計誤差均值分別為-7.59 nT、6.506 nT和-13.32 nT,而方差為119.51 nT、-16.87 nT和5.081 nT。
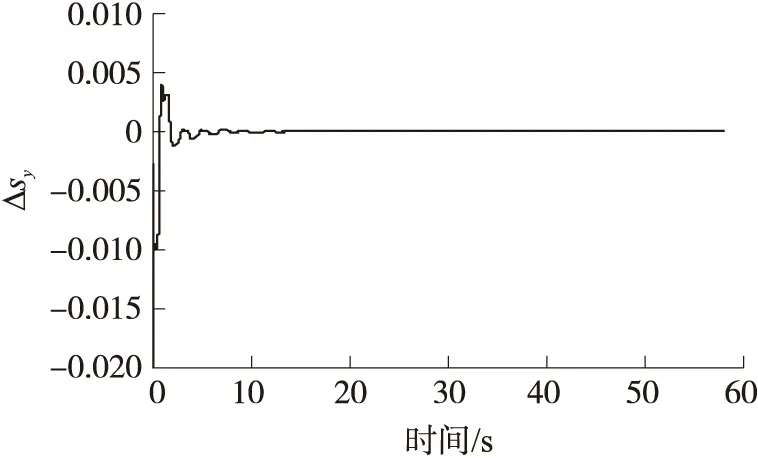
圖2 Y軸標度因數估計誤差曲線
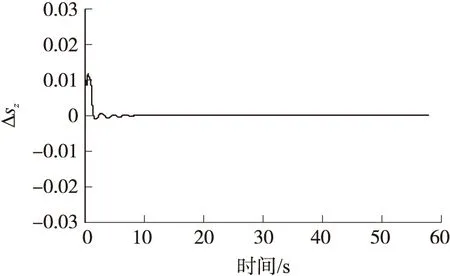
圖3 Z軸標度因數估計誤差曲線

圖4 X軸零偏估計誤差曲線
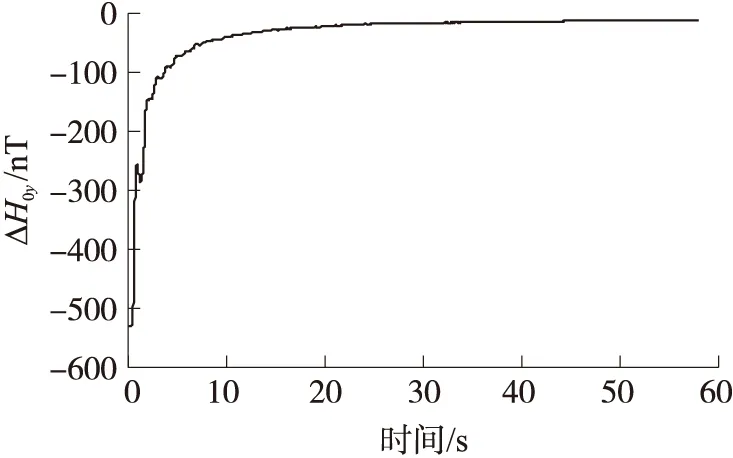
圖5 Y軸零偏估計誤差曲線
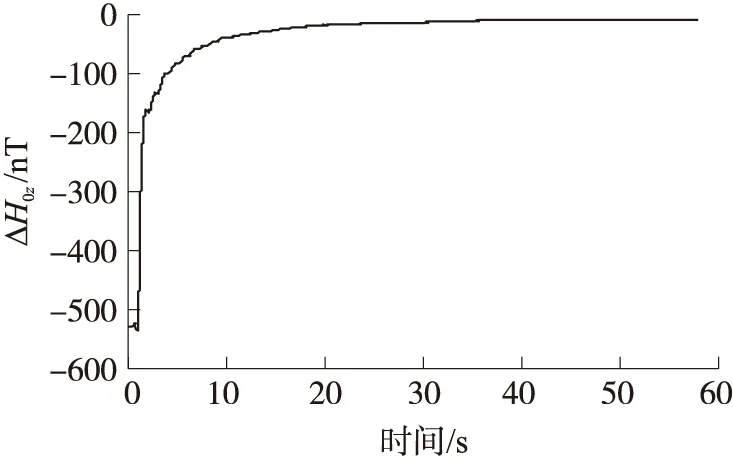
圖6 Z軸零偏誤差估計曲線
②地磁傳感器磁測數據補償結果對比
濾波器在狀態估計的同時利用式(5)進行磁測數據的實時補償,圖7~圖10為磁測數據補償結果。
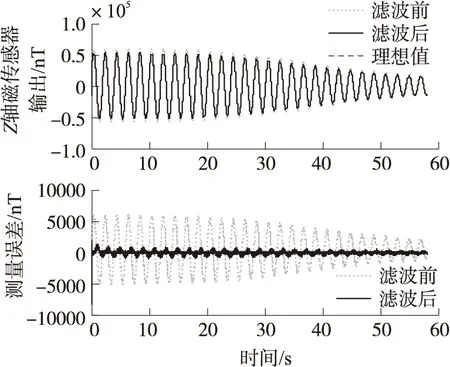
圖9 Z軸地磁傳感器輸出
從上述磁測補償結果來看,磁測數據在補償后其測量精度明顯得到提高。其中,在磁補償前,X、Y、Z各軸磁測誤差均值分別為-715.51 nT、538.82 nT和557.42 nT,地磁總強度測量誤差均值為2 193.7 nT。在誤差補償后,各軸磁測誤差均值分別減小為17.48 nT、33.67 nT和32.87 nT,地磁總強度測量誤差均值為115.62 nT。
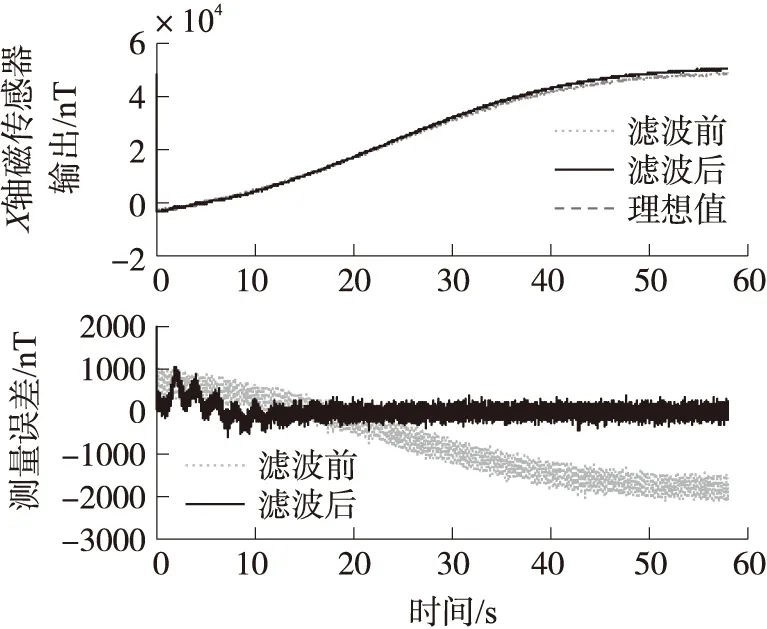
圖7 X軸地磁傳感器測量輸出
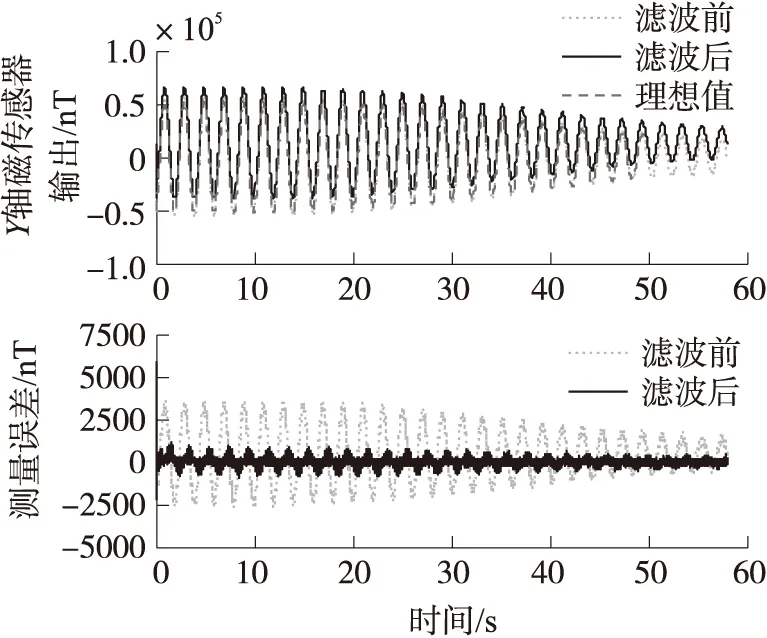
圖8 Y軸地磁傳感器測量輸出
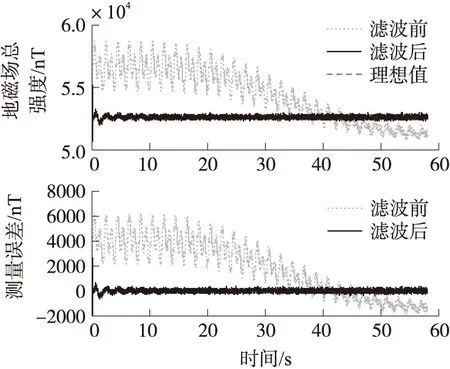
圖10 地磁場總強度
4 結論
本文提出了一種基于Kalman濾波方法的地磁傳感器誤差參數估計與磁測數據的補償方法,以解決磁傳感器在長時間的置放后或者使用環境變化而引起的磁測校準不理想的問題。文中重點推導了地磁傳感器的誤差參數濾波模型,并完成了包括零偏、靈敏度誤差之內的濾波算法的設計,通過數值仿真方法對其進行算法的驗證與性能分析。結果表明該方法是可行的,從磁測仿真結果來看,地磁傳感器經過誤差參數的估計與磁測數據補償后,其測量精度最少提高了一個數量級。
[1] 萬云霞,王言章,程德福. 感應式磁傳感器標定磁場處理方法研究[J]. 傳感技術學報,2013,26(4):520-524.
[2]李勇,劉文怡,李杰,等. 基于橢球擬合的三軸磁傳感器誤差補償方法[J]. 傳感技術學報,2012,25(7):917-920.
[3]劉詩斌,陳露蘭,張韋,等. 一種基于磁傳感器的MEMS陀螺標定方法[J]. 傳感技術學報,2013,26(12):1700-1703.
[4]龍達峰,溫晶晶,張曉明. 高速旋轉彈捷聯磁傳感器在線校準方法[J]. 彈箭與制導學報,2014(3):569-571.
[5]龍禮,張合. 三軸地磁傳感器誤差的自適應校正方法[J]. 儀器儀表學報,2013,(1):161-165.
[6]寇義民. 地磁導航關鍵技術研究[D]. 哈爾濱工業大學,2010.
[7]吳志添,武元新,胡小平,等. 基于總體最小二乘的捷聯三軸磁力儀標定與地磁場測量誤差補償[J]. 兵工學報,2012(10):1202-1209.
[8]Perry M,Jones T. Eddy Current Induction in a Solid Conducting Cylinder with a Transverse Magnetic Field[J]. Magnetics,IEEE Transactions on,1978,14(4):227-232.
[9]Crassidis,John L,Lai,et al. Real-Time Attitude-Independent Three-Axis Magnetometer Calibration[J]. Journal of Guidance,Control,and Dynamics,2005,28(1):115-120.
[10]Gebre-Egziabher,Demoz. Magnetometer Autocalibration Leveraging Measurement Locus Constraints[J]. Journal of Aircraft,2007,44(4):1361-1368.
[11]Gebre-Egziabher,Demoz Elkaim. Calibration of Strapdown Magnetometers in Magnetic Field Domain[J]. Journal of Aerospace Engineering,2006,9(2):87-102.
[12]袁克非. 組合導航系統多源信息融合關鍵技術研究[D]. 哈爾濱:哈爾濱工程大學,2012.

龍達峰(1979-),男,講師,博士研究生,主要研究方向為地磁、慣性組合導航技術,longdafeng@nuc.edu.cn;

劉俊(1968-),男,教授,博士生導師,現任中北大學“微納慣性傳感與集成測量”教育部工程研究中心主任,“電子測試技術”國防科技重點實驗室(太原分部)主任,“儀器科學與動態測試”教育部重點實驗室常務副主任,教育部創新團隊帶頭人,主要從事微米納米技術、慣性測試技術等方面的研究,Liujun@nuc.edu.cn。
ErrorParametersEstimationandCompensationMethodApplytoMagnetometer*
LONGDafeng1,LIUJun1,2*,LIJi1,ZHANGXiaoming1,WENJingjing1
(1.Science and Technology on Electronic Test and Measurement Laboratory,North University of China,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science and Dynamic Measurement(North University of China),Ministry of Education,Taiyuan 030051,China)
The error parameters of a magnetometer,which is calibrated in advance,usually change in different application environment or after long time placement. However,these parameters impose negative effects on the geomagnetic navigation system. In order to solve the above problem,this paper presents magnetometer error parameters estimation and compensation method based on Kalman filter. Simulations demonstrate that the estimator can effectively estimate the error parameters of magnetometer. Moreover,the magnetometer measurement accuracy is at least an order of magnitude increase by means of error parameters estimation and magnetic compensation.
magnetometer;estimation of error parameters;magnetic compensation;error model;kalman filter
項目來源:國家自然科學基金項目(61004127)
2014-10-05修改日期:2014-10-30
V241.61
:A
:1004-1699(2014)12-1649-05
10.3969/j.issn.1004-1699.2014.12.012
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00