Control of EPS with regulating factor
2014-09-05 05:47:38YuguangCHENSiyiXIANGXiaobinBIAN
機床與液壓 2014年6期
Yu-guang CHEN,Si-yi XIANG, Xiao-bin BIAN
1The Key Lab of Advanced Manufacture Technique for Automobile Parts,Ministry of Education of the People’sRepublic of China,Chongqing 400050,China;2Institute of Electronic Information &Automation,Chongqing University of Technology,Chongqing 400050,China
ControlofEPSwithregulatingfactor
Yu-guang CHEN?1,2,Si-yi XIANG2, Xiao-bin BIAN3
1TheKeyLabofAdvancedManufactureTechniqueforAutomobileParts,MinistryofEducationofthePeople’sRepublicofChina,Chongqing400050,China;2InstituteofElectronicInformation&Automation,ChongqingUniversityofTechnology,Chongqing400050,China
It is difficult to provide assistant torque reasonably using the conventional EPS control when road adhesion coefficient changes.An EPS control with a regulating factor was proposed to solve the problem mentioned above.It can adjust vehicle speed inductance through the regulating factor to achieve that assist characteristic changes with the changes of road adhesion coefficient.Furthermore,it can enhance the self-adaptive ability of EPS.It is approved that the assistant torque could be adjusted reasonably and effectively by the regulating factor,based on the simulation.
EPS control,Regulating factor,Road adhesion coefficient,Steering safety
The external factors influencing EPS performances are of the discreteness,the nonlinear and the uncertain characteristics.Among them,road adhesion coefficient plays an important role.Road adhesion coefficient is not considered on EPS study at present.An assist characteristic solidified cannot meet the need of EPS control for road adhesion coefficient change.The greater the steering wheel torque is,the more easily the wheel sideslip occurs when the road adhesion coefficient is small[1-3].Specifically,an accident will occur if assistant torque can't be adjusted in time when road adhesion coefficient goes smaller on continuing steering.
An EPS control with regulating factor is proposed to solve the problems mentioned above.Its power assist characteristic can adapt to different road adhesion coefficient by adjusting vehicle speed inductance,so as to improve steering safety[4].
1.An EPS control with regulating factor
1.1.EPSmathematicalmodel
A brushless DC motor and a PWM module are used in EPS system.Make the following assumptions when establishing mathematical model.Transfer efficiency of torque is 100%.The rotational inertia of torsion bar has been ignored.Mechanical element stiffness is infinite except the torsion bar[5].It is equivalent to the rotational inertia and damping coefficient of steering wheel and steering shaft that there is the rotational inertia and damping coefficient of the parts,such as steering wheel,steering shaft,torsion bar’s sleeve,jackshaft,reducing mechanism and so on[6-7].
The mathematical model is shown as follow.
(1)
WhereThis steering wheel torque,Ksis the stiffness of torque sensor,θhis steering wheel angle,Jhis the rotary inertia of steering wheel,Bhis the damping coefficient of steering wheel,θsis torsion bar angle,Tdis torque measured by torque sensor,xris the displacement of tie rod,mis the quality of tie rod,bris the damping coefficient of tie rod,Rsis pinion radius,Tris steering resistance torque,Tais assistant torque outputted,Jmis the rotary inertia of motor spindle and load,Bmis the damping coefficient of motor,Lis armature inductance,Ris armature resistance,Gis transmission ratio,θmis motor's rotation angle,Kbis back-emf,Uis terminal voltage.
The diagram of EPS control is shown in Figure 1.There,vis vehicle speed,sis wheel slip rate,αis regulating factor.
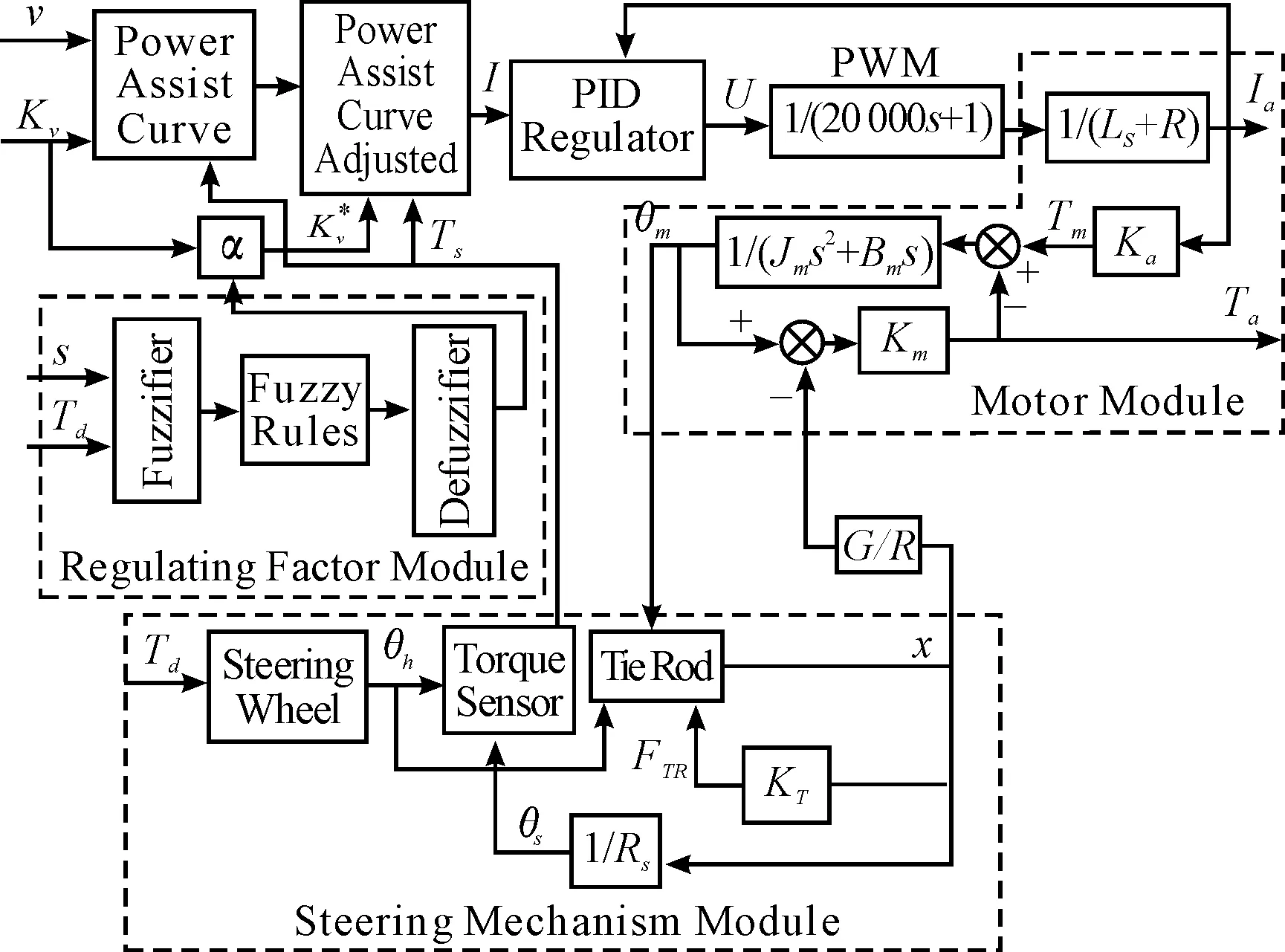
Figure 1.The diagram of EPS control
1.2.Powerassistcharacteristic
Vehicle speed inductanceKvis established by quartic polynomial fit based on experiment data of the vehicle,Big Dipper.
Kv=4.388-0.1571v+0.003 878v2-
4.955×10-5v3+2.332×10-7v4
(2)
SettingTd0=1 N·m andTdmax=7 N·m,whereTd0is critical value of zero assistant torque zone and varied assistant torque zone,Tdmaxis critical value of varied assistant torque zone and saturated assistant torque zone.Power assist curve is shown in Figure 2.
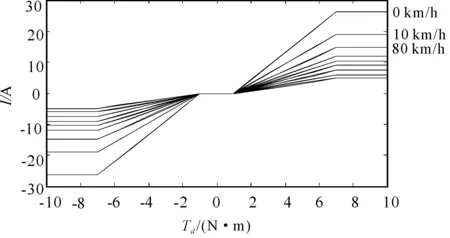
Figure 2.Power assist curve
1.3.Regulatingfactor
Road adhesion coefficient is described by wheel slip rates.s=1-v/(wr),wherewis the wheel speed,ris wheel radius.αis defined as follow.
α=f(s,Td)
(3)
It is normal road adhesion coefficient whensis less than 0.2.αdoes not provide regulating function.The less road adhesion coefficient is the greatersis.αis inverse relation tosandTd.
The functionα=f(s,Td) is achieved by fuzzy logic algorithm.The fuzzy inference mechanism uses Mamdani.sandTdas input variables,whileαis the output variable.The basic ranges ofsandαare all[0,1].The basic range ofTdis[0,7].The fuzzy subsets ofs,Tdandαare all designed as {VS,S,M,B,VB}.s,Tdandαall use mixed membership function,which consists of membership functions of triangle,Z and S.
The membership function ofαis shown in Figure 3.The membership interval of VB is designed as very small to ensure steering portability of EPS on the normal road.The three-dimensional relationship ofs,Tdandαis shown in Figure 4.
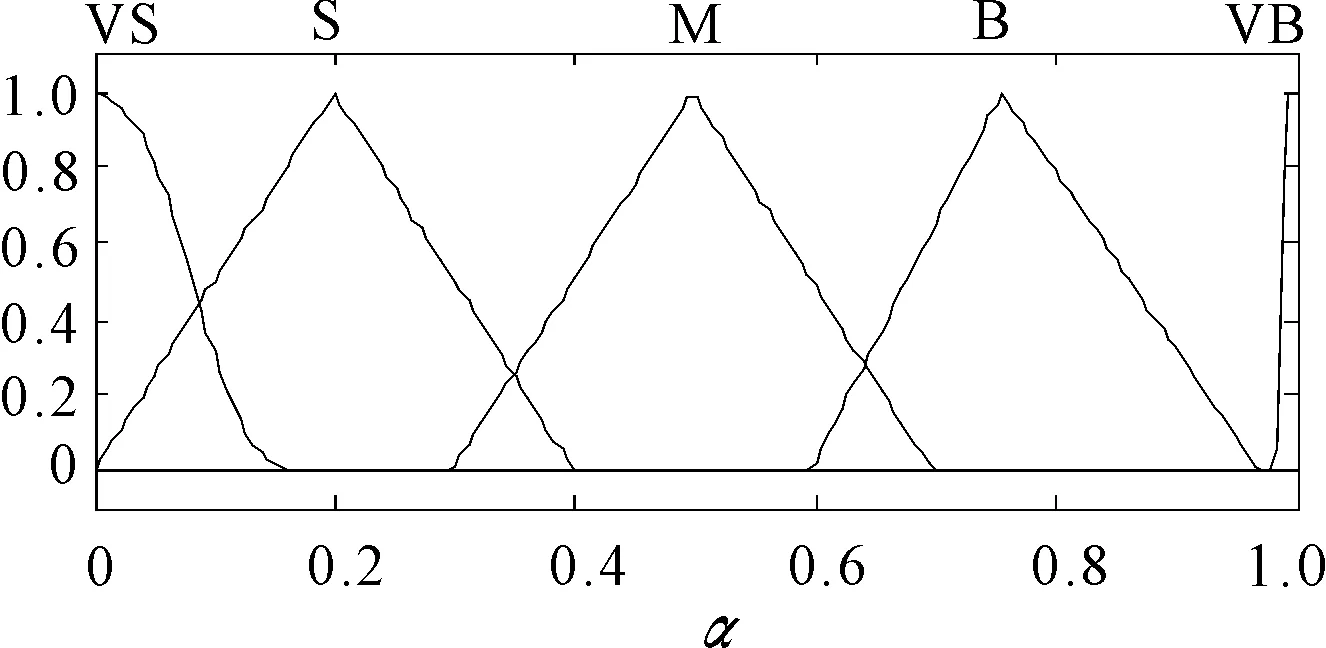
Figure 3.Membership function of α
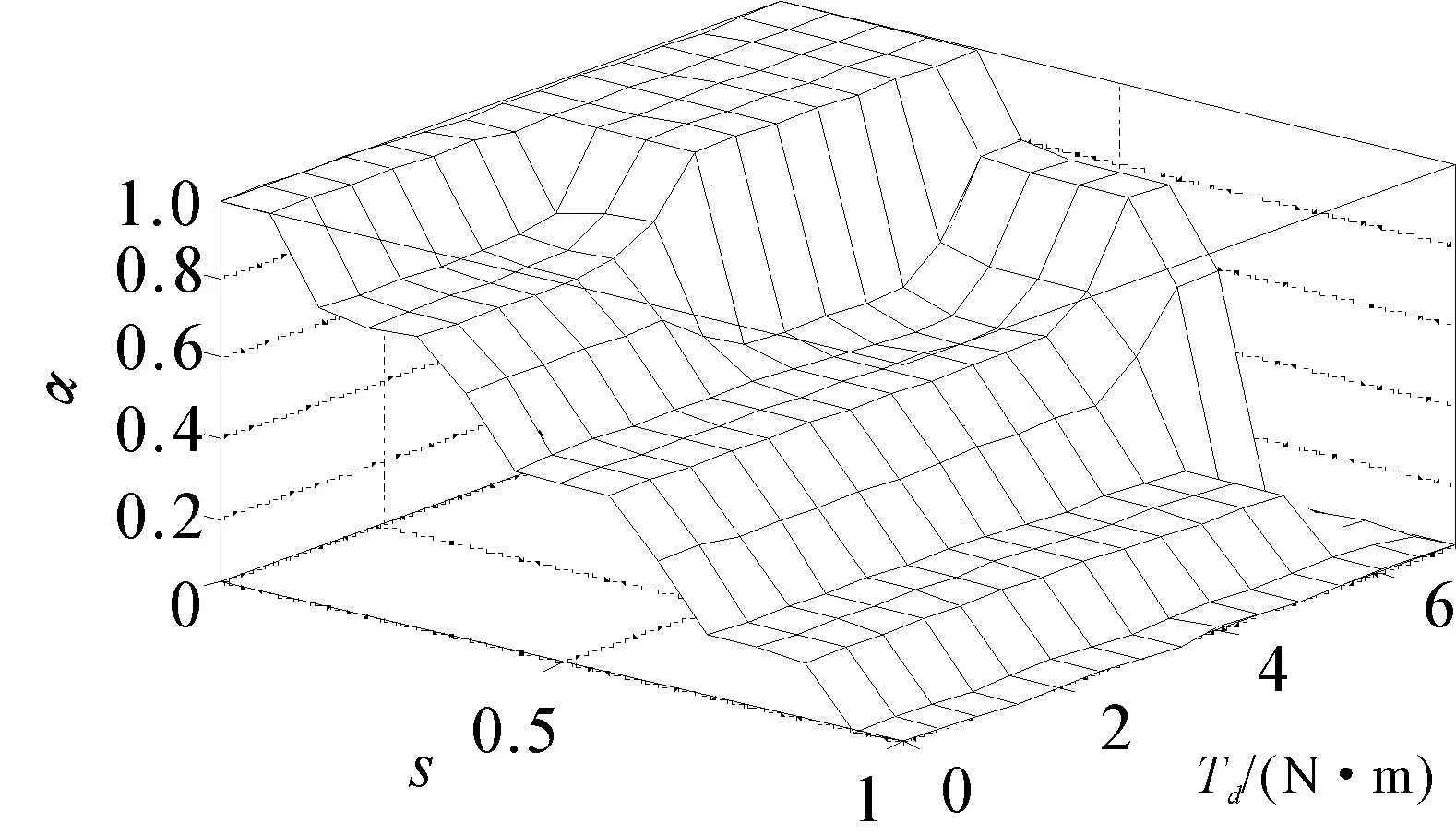
Figure 4.The relationship of s,Td and α
Some conclusions can be drawn from Figure 4.Firstly,αis regulated relatively great whensis very small so as to steering portability of EPS is achieved.Meanwhile,the greaterTdis the greaterαis.Secondly,αdecreases rapidly whensgoes great so as to good steering feeling of driver can be obtained.Meanwhile,the greaterTdis the smallerαis.αis near zero whensis close to 0.7,which forces almost no power assistant torque outputted.
1.4.AcontrolstrategyofEPSwithregulatingfactor
The control block diagram of EPS with regulating factor is shown in Figure 1.Vehicle speed inductanceKvis adjusted online by regulatingαin order to achieve the purpose of adjusting power assist curve of EPS.
(4)
The assistant torque is provided according to the preset power assist curve when EPS works on normal road condition.The smaller assistant torque is provided the smaller road adhesion coefficient is,so as to improve steering feeling and steering safety.
2.Simulation
2.1.Simulationverification
The simulation parameters are shown in Table 1.There,Kais DC torque constant,Kmis DC electromagnetic torque coefficient,KTis equivalent elastic coefficient of tie rod.
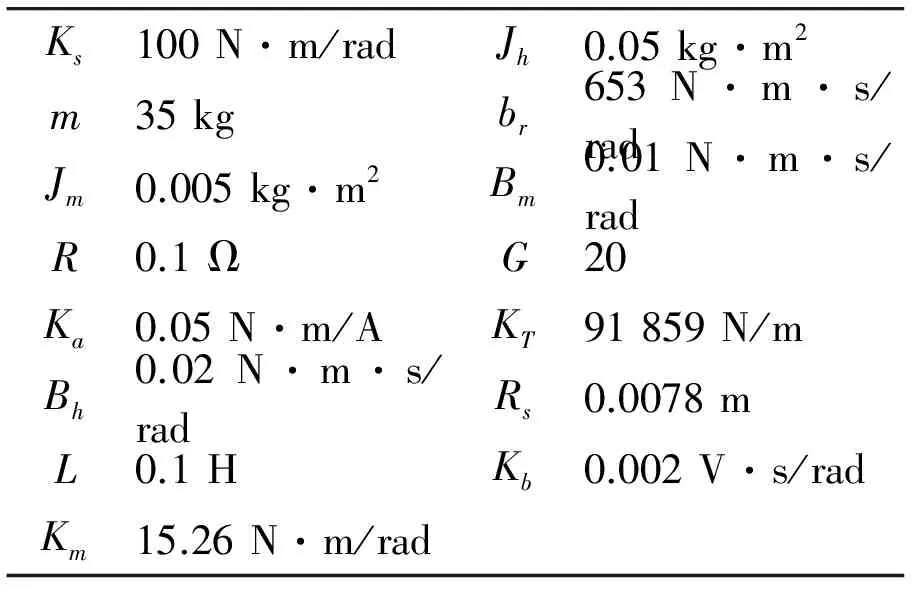
Table 1.Simulation parameters
WhenTd=5 N·m,the armature current under different speed is shown in Figure 5.The armature current decreases along with speed increasing.The current rise time is small and the assistant torque is steady.It proves the correctness of the simulation model.
2.2.ThesimulationofEPSwithregulatingfactor
WhereTd=5 N·m andv=30 km/h,the armature current I under different wheel slip rate s is shown in Figure 6.Whenschanges from 0.2 to 0.6 and then to 0.2 during the continuous turning and steering wheel keeping still,the curves ofI,Tr,andTaare shown in Figure 7.
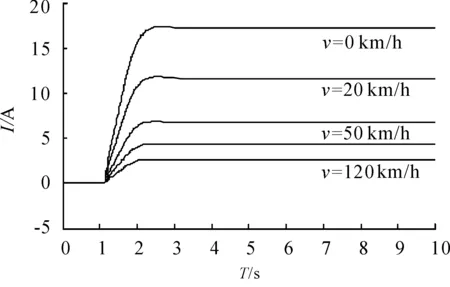
Figure 5.Armature current under different speed
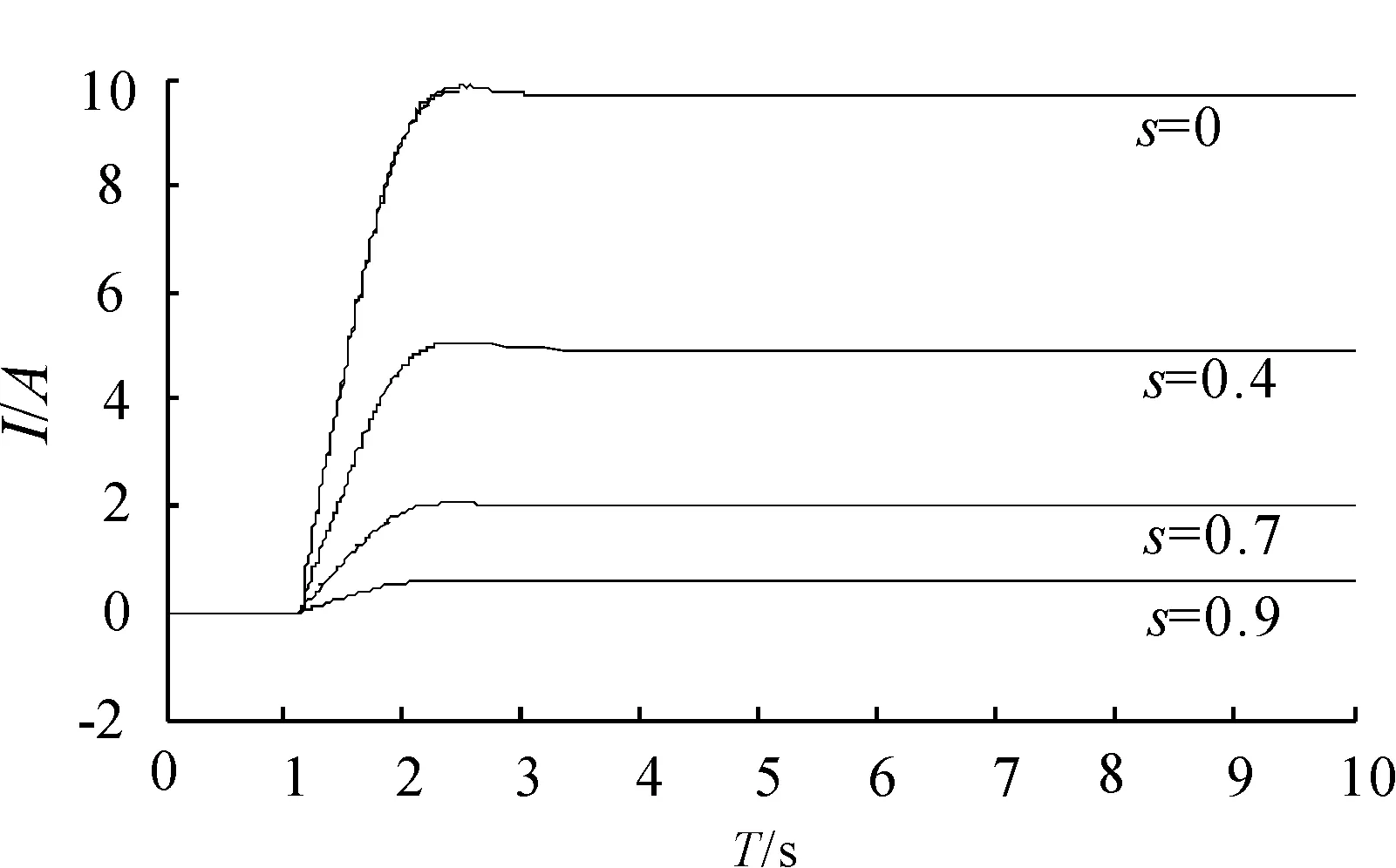
Figure 6.Armature current under different s
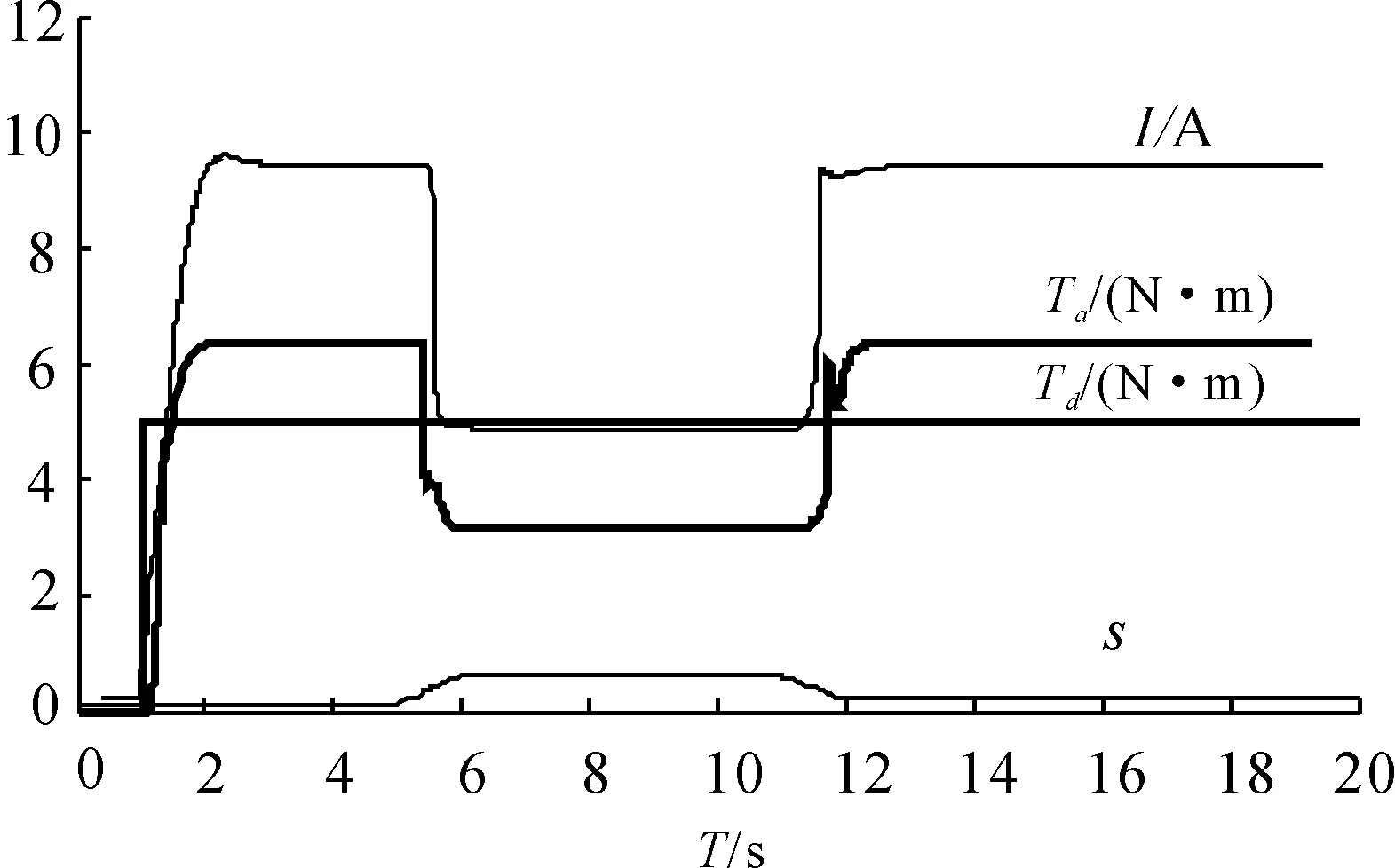
Figure 7.The curves of I,Tr and Ta when s changes
3.Analyses of simulation results
The following conclusions can be obtained based on the simulation results.
It is indicated in Figure 6 that armature current I changes along with the wheel slip rate s.Armature current is larger when the wheel slip rate is less than to 0.2 to ensure the steering portability.Armature current decreases to zero along with the increasing of wheel slip rate when the wheel slip rate is greater than 0.2.
It is indicated in Figure 7 that assistant torque can be adjusted automatically along with the change of the wheel slip rate when the vehicle speed and steering wheel torque are constant value.Armature current drops rapidly when s goes to 0.6 and armature current restores rapidly then when s returns to 0.2.
It is indicated also in Figure 7 that assistant torque decreases rapidly when the wheel slip rate increase so as to enhance steering road feel of the driver.
As a result,EPS with regulating factor can enhance the self-adaptive ability of EPS to improve steering safety.
4.Conclusion
The self-adaptive ability of EPS can be improved by regulating factor,which adjusted automatically power assist characteristic according to road adhesion coefficient change.The simulation results show that the steering performance of EPS system can be improved greatly.The system can overcome the effect of road adhesion coefficient change effectively.
[1]Amberkar S,Kushion M, Eschtruth K,et al.Diagnostic Development for an Electric Power Steering System[J].SAE technical paper series,2000,1:819.
[2]Osuka A,et al.Development of Pinion—Assist Type Electric Power Steering System[J]. KOYO Engineering Journal Edition No.161E,2002:46-51.
[3]Yuji Kozaki,et al.Electric Power Steering(EPS)[J].Motion&Contr01.No.6—1999 NSK: 9-15.
[4]Davis F W.Hydraulic steering mechanism[S].US Patent:US1790620,1931.
[5]Noguchi A.Development of a Steering Angle and Torque Sensor of Contact-type[J].Furukawa Review,2004(25):36-41.
[6]Liu Guang,Kurnia.A low torque ripple PMSM drive for EPS applications[C].IEEE Applied Power Electronics Conference and Expositi,2004(2):1130-1134.
[7]Kim J,Song J.Control logic for all electric power steering system using assistmotor[J].Mechatronics,2002,12,447-459.
帶調節(jié)因子的EPS助力控制
陳渝光?1,2,向思怡2,邊曉彬2
1汽車零部件先進制造技術教育部重點實驗室,重慶 400050;2重慶理工大學 電子信息與自動化學院,重慶 400050
針對常規(guī)EPS助力控制難以隨路面附著系數(shù)的變化提供合理的助力力矩的問題,提出了一種帶有調節(jié)因子的助力控制。該方法通過調節(jié)因子在線調節(jié)車速感應系數(shù),使EPS的助力特性隨路面附著系數(shù)的變化而變化,從而增強EPS助力控制的自適能力。Matlab/simulink仿真研究表明,該方法能夠隨路面附著系數(shù)變化合理有效地調節(jié)助力力矩。
EPS助力控制;調節(jié)因子;路面附著系數(shù);轉向安全
U270.2
2013-10-25
? Yu-guang CHEN,Professor.E-mail: cyg6610@qq.com
10.3969/j.issn.1001-3881.2014.06.005
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
環(huán)球人文地理(2022年8期)2022-09-21 03:49:42
科學大眾(2021年9期)2021-07-16 07:02:40
金橋(2020年9期)2020-10-27 01:59:44
中學生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
意林·全彩Color(2019年11期)2019-12-30 06:08:38
重慶行政(公共人物)(2018年5期)2018-11-06 07:42:18
重慶文理學院學報(社會科學版)(2017年5期)2017-10-23 01:30:02
商周刊(2017年17期)2017-09-08 13:08:58
今日重慶(2017年5期)2017-07-05 12:52:25

- 機床與液壓的其它文章
- Investigation of helical ball micro milling with variable radial immersion*
- Numerical simulation of the double suction balance type screw compressor working process*
- Parameter optimization of electro-hydraulic proportionalsystem of PID based on the improved ant colony algorithm
- Flying cutter machining and cutter design based on the machining principle of cycloid rotational indexing
- Simulation of multi-modal control in electro-hydraulicposition servo-system*
- Optimal design and security verification of flying cutterbased on finite element analysis