同軸對(duì)轉(zhuǎn)行星齒輪傳動(dòng)系統(tǒng)動(dòng)態(tài)特性分析
2014-09-05 09:58:04石萬(wàn)凱龔建春
振動(dòng)與沖擊 2014年7期
石萬(wàn)凱, 劉 敬, 龔建春
(1.重慶大學(xué) 機(jī)械傳動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,重慶 400044; 2.攀枝花學(xué)院 機(jī)電工程學(xué)院,攀枝花 617000)
行星齒輪傳動(dòng)系統(tǒng)具有體積小、傳動(dòng)比大、承載能力強(qiáng)等優(yōu)點(diǎn)。同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)不僅擁有普通行星齒輪傳動(dòng)的特點(diǎn),還可以將單一輸入轉(zhuǎn)換成兩個(gè)輸出,實(shí)現(xiàn)減速增扭的作用。同時(shí)也可以滿足在工作中產(chǎn)生較小的不平衡力矩和較低的振動(dòng)噪聲的要求。而行星齒輪系統(tǒng)的動(dòng)力學(xué)分析對(duì)整個(gè)系統(tǒng)的振動(dòng)噪聲控制有很大影響,是同軸對(duì)轉(zhuǎn)系統(tǒng)設(shè)計(jì)的主要內(nèi)容之一。
20世紀(jì)70年代以來(lái),國(guó)內(nèi)外學(xué)者對(duì)行星齒輪機(jī)構(gòu)動(dòng)力學(xué)進(jìn)行了許多理論與實(shí)驗(yàn)研究。Hidaka等[1]運(yùn)用理論與實(shí)驗(yàn)相結(jié)合的方法,分析了行星齒輪傳動(dòng)中齒輪的安裝與制造誤差對(duì)系統(tǒng)載荷分配的影響,同時(shí)也得到了浮動(dòng)某一構(gòu)件能夠改善系統(tǒng)的載荷分配。Kahraman等[2-3]用集中質(zhì)量法建立了行星齒輪系統(tǒng)的非線性時(shí)變動(dòng)態(tài)模型,在此模型中,考慮了銷軸孔的位置誤差與行星輪偏心誤差對(duì)系統(tǒng)動(dòng)態(tài)特性的影響,又通過(guò)實(shí)驗(yàn)?zāi)P万?yàn)證了不同誤差與行星輪個(gè)數(shù)對(duì)系統(tǒng)動(dòng)態(tài)特性的影響。Lin等[4]建立了直齒行星齒輪傳動(dòng)系統(tǒng)的扭轉(zhuǎn)—橫向耦合模型,分析了無(wú)阻尼振動(dòng)下系統(tǒng)的三種振動(dòng)模式:扭轉(zhuǎn)振動(dòng)、橫向振動(dòng)和行星輪振動(dòng)。孫智民等[5]建立了封閉行星齒輪傳動(dòng)系統(tǒng)的動(dòng)力學(xué)模型,分析了差動(dòng)級(jí)與封閉級(jí)的動(dòng)載系數(shù)以及不同輸入轉(zhuǎn)速下太陽(yáng)輪的浮動(dòng)軌跡。陸俊華等[6]分析了不同裝配誤差與安裝誤差對(duì)2K-H型行星傳動(dòng)系統(tǒng)均載特性的影響。秦大同等[7-8]基于Lagrange方程建立了盾構(gòu)機(jī)多級(jí)行星齒輪傳動(dòng)的動(dòng)力學(xué)模型,分析該系統(tǒng)的模態(tài)特性、位移響應(yīng)和加速度響應(yīng)等。對(duì)于同軸對(duì)轉(zhuǎn)輪系功率流流向,石萬(wàn)凱等[9-10]分析了由差動(dòng)輪系和復(fù)合輪系組成的同軸對(duì)轉(zhuǎn)輪系的功率流。并確定了其不產(chǎn)生功率循環(huán)所需要滿足的條件。
1 齒輪傳動(dòng)系統(tǒng)的動(dòng)力學(xué)模型
由定軸輪系與差動(dòng)輪系組成的同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)如圖1所示,定軸輪系由太陽(yáng)輪Zs1、行星輪Zpi(i=1,2,…,N)和內(nèi)齒圈Zr1組成,差動(dòng)輪系由太陽(yáng)輪Zs2、行星輪Zmj(j=1,2,…,M)、內(nèi)齒圈Zr2以及行星架C組成,其中內(nèi)齒圈是雙齒圈且采用相同的幾何參數(shù)。輸入扭矩通過(guò)太陽(yáng)輪分流傳遞給定軸輪系機(jī)構(gòu)與差動(dòng)輪系機(jī)構(gòu),并通過(guò)內(nèi)齒圈和行星架C分別形成輸出A和B。
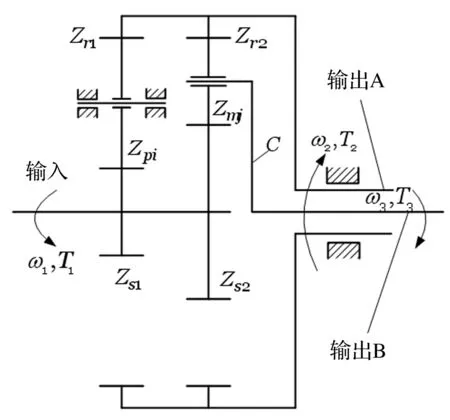
圖1 同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)簡(jiǎn)圖
基于集中質(zhì)量參數(shù)法建立同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)的動(dòng)力學(xué)模型,模型中考慮各個(gè)齒輪副的時(shí)變嚙合剛度、嚙合阻尼和嚙合誤差的影響。圖2(a)為固定坐標(biāo)系下定軸輪系的動(dòng)力學(xué)模型,其中Kspi、Cspi、espi分別為太陽(yáng)輪Zs1與行星輪Zpi的嚙合剛度、嚙合阻尼和嚙合誤差,Krpi、Crpi、erpi分別為內(nèi)齒圈Zr1與行星輪Zpi的嚙合剛度、嚙合阻尼和嚙合誤差;圖2(b)是差動(dòng)輪系以行星架轉(zhuǎn)速ωc為動(dòng)坐標(biāo)的動(dòng)力學(xué)模型,其中Ksmj、Csmj、esmj分別為太陽(yáng)輪Zs2與行星輪Zr2的嚙合剛度、嚙合阻尼和嚙合誤差,Krmj、Crmj、ermj分別為內(nèi)齒圈Zr2與行星輪Zmj的嚙合剛度、嚙合阻尼和嚙合誤差。在圖(2)中,k1為太陽(yáng)輪Zs1、Zs2之間的耦合扭轉(zhuǎn)剛度,k2為內(nèi)齒圈Zr1、Zr2之間的耦合扭轉(zhuǎn)剛度,kC為行星架的扭轉(zhuǎn)剛度,kr1、kr2分別為內(nèi)齒圈Zr1、Zr2的支撐剛度,kp1、kp2分別為行星輪Zpi、Zmj的支撐剛度,行星輪支撐剛度的計(jì)算按Montestruc[11]提供的方法進(jìn)行計(jì)算。
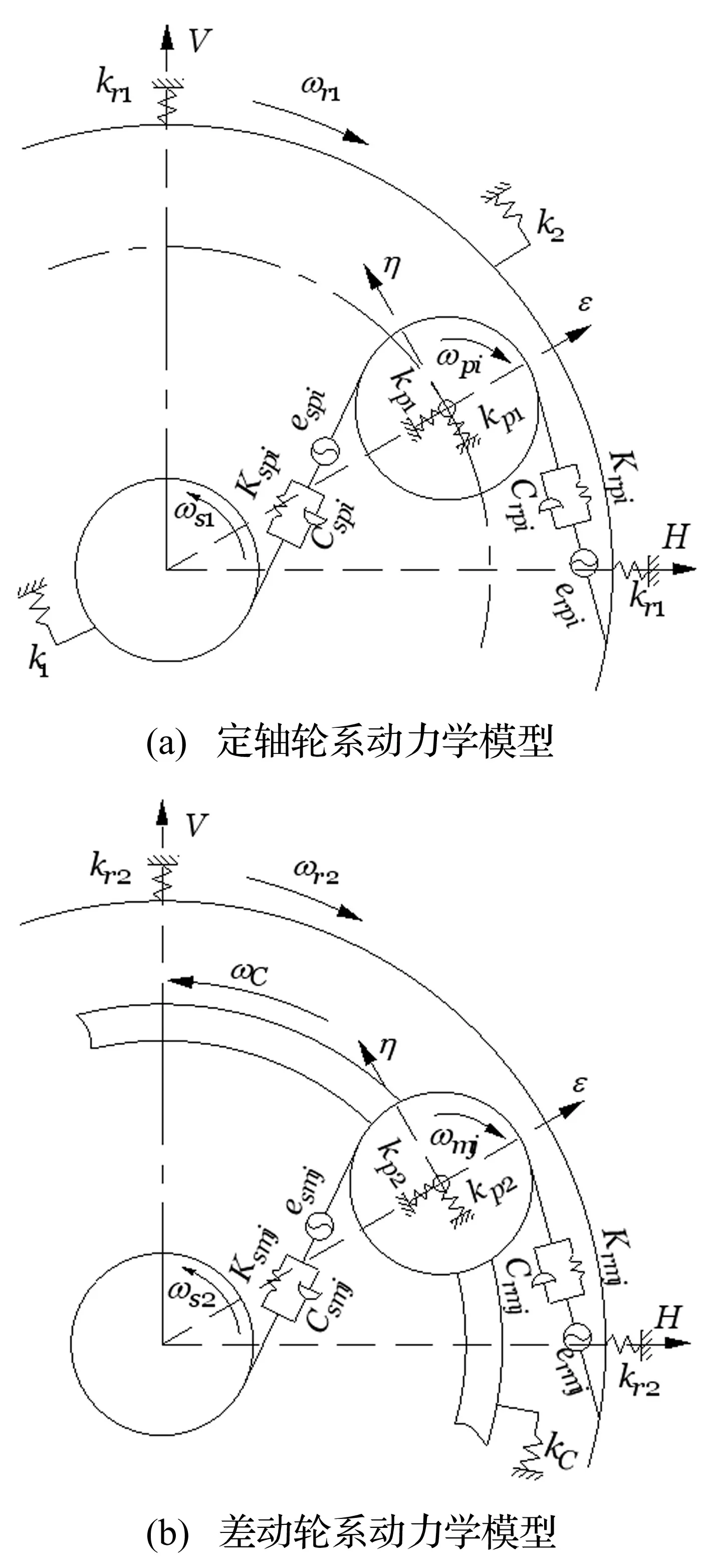
圖2 同軸對(duì)轉(zhuǎn)系統(tǒng)動(dòng)力學(xué)模型
同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)共有(13+3N+3M)個(gè)自由度,其廣義坐標(biāo)如下:
X=(xs1,Hs1,Vs1,xpi,εpi,ηpi,xr1,Hr1,Vr1,xs2,Hs2,Vs2,xmj,εmj,ηmj,xr2,Hr2,Vr2,xc)T
(i=1,2,…,N;j=1,2,…,M)
(1)
式中:xs1,xpi,xr1,xs2,xmj和xr2分別為齒輪Zs1,Zpi,Zr1,Zs2,Zmj和Zr2沿嚙合線的微位移,Hxy和Vxy(x=s,r;y=1,2)為齒輪xy中心的橫向和縱向微位移,εpi和ηpi為行星輪Zpi中心的徑向和切向微位移,εmj和ηmj為行星輪Zmj在動(dòng)坐標(biāo)系下質(zhì)心的徑向和切向微位移,xC為行星架C在其半徑rC上的切向微位移。
2 同軸對(duì)轉(zhuǎn)系統(tǒng)的動(dòng)力學(xué)平衡方程
設(shè)δs1pi和δr1pi為定軸輪系第i個(gè)行星輪與太陽(yáng)輪和內(nèi)齒圈沿嚙合線的等效微位移,δs2mj和δr2mj為差動(dòng)輪系第j個(gè)行星輪與太陽(yáng)輪和內(nèi)齒圈沿嚙合線的等效微位移,則:
(2)
式中,φi=2π(i-1)/N為定軸輪系第i個(gè)行星輪相對(duì)于第一個(gè)行星輪的位置角,φj=2π(j-1)/M為差動(dòng)輪系第j個(gè)行星輪相對(duì)于第一個(gè)行星輪的位置角;espi和erpi分別為定軸輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的等效嚙合誤差,esmj和ermj分別為差動(dòng)輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的等效嚙合誤差;α1和α2分別為定軸輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的嚙合角,α3和α4分別為差動(dòng)輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的嚙合角。
根據(jù)式(2)中的微小位移量,乘以嚙合剛度可以得到每對(duì)齒輪副之間的嚙合力。令Fs1pi和Fr1pi為定軸輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的嚙合力,F(xiàn)s2mj和Fr2mj為差動(dòng)輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的嚙合力,則各個(gè)齒輪副沿嚙合線方向的嚙合力為:
(3)
同理可以得到齒輪副的嚙合阻尼力,令Ds2pi和Dr2pi為定軸輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的嚙合阻尼力,Ds2mj和Dr2mj為差動(dòng)輪系行星輪與太陽(yáng)輪和內(nèi)齒圈的嚙合阻尼力,則各個(gè)齒輪副沿嚙合線方向的嚙合阻尼力為:
(4)
根據(jù)Lagrange方程推導(dǎo)出同軸對(duì)轉(zhuǎn)系統(tǒng)各個(gè)自由度的振動(dòng)微分方程:
定軸輪系太陽(yáng)輪平衡方程:
定軸輪系行星輪平衡方程:
(5b)
定軸輪系內(nèi)齒圈平衡方程:
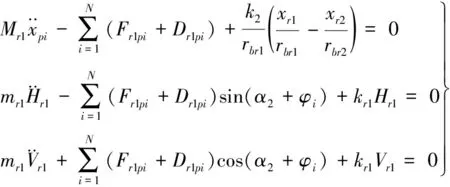
(5c)
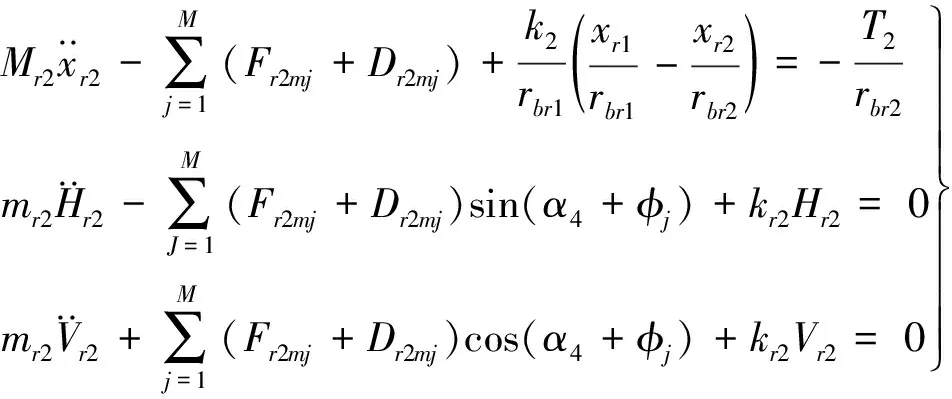
差動(dòng)輪系太陽(yáng)輪平衡方程:
(5d)
差動(dòng)輪系行星輪平衡方程:
(5e)
差動(dòng)輪系內(nèi)齒圈平衡方程:
(5f)
差動(dòng)輪系行星架平衡方程:
(5g)
式中M和m分別為各個(gè)構(gòu)件的等效質(zhì)量和平移質(zhì)量,且M=J/r2,J為構(gòu)件的轉(zhuǎn)動(dòng)慣量,對(duì)于齒輪,r是其基圓半徑rb,對(duì)于行星架,r是其當(dāng)量基圓半徑rbc。T1為同軸對(duì)轉(zhuǎn)系統(tǒng)輸入扭矩,T2為差動(dòng)輪系內(nèi)齒圈Zr2的輸出扭矩,T3為差動(dòng)輪系行星架C輸出扭矩。
將方程(5a)~(5g)整理成如下的矩陣形式:

(6)
式中:M,X為廣義質(zhì)量矩陣,廣義坐標(biāo)位移列陣;C,F(xiàn)為阻尼矩陣,外載荷列陣;K(t)為時(shí)變剛度矩陣。
3 系統(tǒng)的激勵(lì)與功率流
3.1 綜合嚙合誤差激勵(lì)
齒輪的制造誤差和安裝誤差是齒輪傳動(dòng)系統(tǒng)產(chǎn)生振動(dòng)的主要因素。誤差可以用隨齒輪嚙合周期變化的正弦函數(shù)來(lái)描述,并且認(rèn)為行星架安裝和制造偏心誤差都包含在太陽(yáng)輪和齒圈的偏心誤差中,只用考慮齒輪偏心誤差的影響即可[5]。
將定軸輪系偏心誤差與齒頻誤差等效到齒輪副嚙合線上,則:
(7)
式中,Es1pi和Er1pi分別表示行星輪與太陽(yáng)輪和內(nèi)齒圈嚙合的齒頻誤差,其初相位分別為βs1pi和βr1pi;Es1,Epi和Er1分別表示太陽(yáng)輪、行星輪和內(nèi)齒圈的偏心誤差,其初相位分別為βs1,βpi和βr2;ω1表示定軸輪系的嚙合齒頻,ωs1,ωpi和ωr1分別表示太陽(yáng)輪、行星輪和內(nèi)齒圈的角速度。
將差動(dòng)輪系偏心誤差與齒頻誤差等效到齒輪副嚙合線上,則:
(8)
式中,Es2mj和Er2mj分別表示行星輪與太陽(yáng)輪和內(nèi)齒圈嚙合的齒頻誤差,其初相位分別為βs2mj和βr2mj;Es2,Emj和Er2分別表示太陽(yáng)輪、行星輪和內(nèi)齒圈的偏心誤差,其初相位分別為βs2,βmj和βr2;ω2表示差動(dòng)輪系的嚙合齒頻,ωs2C,ωmjC和ωr2C分別表示太陽(yáng)輪、行星輪和內(nèi)齒圈相對(duì)行星架的角速度。
3.2 時(shí)變嚙合剛度激勵(lì)
本文齒輪時(shí)變嚙合剛度的計(jì)算按Maatar等[11]推導(dǎo)的公式進(jìn)行計(jì)算,則:

(9)
式中,τ=t/Tm,t為時(shí)間,Tm為嚙合周期;b齒寬,ε為直齒輪副重合度,k0為靜載荷下單位齒寬平均嚙合剛度,且:
Ak=sin(2πkε)/(π·ε·k)
Bk=(1-cos(2πkε)/(π·ε·k)
3.3 功率流分析
對(duì)于圖1所示的同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng),通過(guò)合理的齒數(shù)配比可以滿足ω2=-ω2的設(shè)計(jì)要求,同時(shí)在給定的輸入功率條件下,此傳動(dòng)系統(tǒng)可能存在功率循環(huán)的問(wèn)題,影響傳動(dòng)的效率。同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)不存在功率循環(huán)且定軸輪系也傳遞功率的條件是[9]:
(10)
式中:i為設(shè)計(jì)傳動(dòng)比,且i=ωs1/ωr1。
對(duì)于此同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng),還需滿足|T2|?|T3|,可以得到:
(11)
式中:P1為定軸輪系分流的功率,P2為差動(dòng)輪系分流的功率,P為同軸對(duì)轉(zhuǎn)系統(tǒng)輸入功率。
4 系統(tǒng)微分方程求解及動(dòng)態(tài)特性分析
對(duì)于微分方程組,得到其解析解是非常困難的,一般采用數(shù)值分析方法進(jìn)行求解,本文采用4階Runge-Kutta法來(lái)獲得方程(6)的數(shù)值解。對(duì)某一同軸對(duì)轉(zhuǎn)系統(tǒng)運(yùn)用上述方法進(jìn)行數(shù)值計(jì)算,其主要參數(shù)如下,兩級(jí)太陽(yáng)輪與行星輪精度等級(jí)為5級(jí),內(nèi)齒圈為6級(jí)。定軸輪系:Zs1=22,Zpi=44,Zr1=110,模數(shù)m1=1.75,齒寬b1=20 mm,行星輪個(gè)數(shù)N=3;差動(dòng)輪系:Zs2=55,Zmj=27,Zr2=110,模數(shù)m2=1.75,齒寬b2=30 mm,行星輪個(gè)數(shù)M=3;系統(tǒng)輸入轉(zhuǎn)速n=10 000 r/min,輸入功率P=300 kW,各齒輪的偏心誤差為10 μm,齒頻誤差為5 μm。
4.1 同軸對(duì)轉(zhuǎn)系統(tǒng)各構(gòu)件振動(dòng)響應(yīng)
由于定軸輪系與差動(dòng)輪系中的各個(gè)行星輪只存在空間位置差,并且在本文中各個(gè)行星輪綜合誤差取相同值,所以在每一級(jí)中只對(duì)其中一個(gè)行星輪進(jìn)行振動(dòng)分析。各級(jí)太陽(yáng)輪和行星輪的振動(dòng)位移時(shí)域曲線如圖3、圖4和圖5 所示。各個(gè)齒輪的振動(dòng)位移曲線都是關(guān)于y=0軸對(duì)稱,并且呈現(xiàn)出低頻周期性波動(dòng);由于差動(dòng)輪系承擔(dān)了5/6的輸入扭矩,且嚙合頻率更高,其扭轉(zhuǎn)振動(dòng)幅值高于定軸輪系;同時(shí)也可以看出,差動(dòng)輪系太陽(yáng)輪采用了浮動(dòng)裝置,橫向和縱向的振動(dòng)位移相對(duì)于其扭轉(zhuǎn)振動(dòng)來(lái)說(shuō),振動(dòng)位移曲線更加的平滑。

圖3 定軸輪系位移動(dòng)態(tài)響應(yīng)曲線
系統(tǒng)部分構(gòu)件速度動(dòng)態(tài)響應(yīng)如圖6和圖7所示。
由圖6、 7可知,定軸級(jí)與差動(dòng)級(jí)的太陽(yáng)輪和行星輪沿嚙合線的振動(dòng)速度響應(yīng)規(guī)律相同,總是關(guān)于y=0對(duì)稱,并且不具有周期性,兩級(jí)太陽(yáng)輪的輸入轉(zhuǎn)速相等,但外部激勵(lì)不同,速度響應(yīng)曲線相似,幅值不等,定軸級(jí)太陽(yáng)輪振動(dòng)速度幅值約為1.4 m/s,差動(dòng)級(jí)約為3.8 m/s。同時(shí),行星架的扭轉(zhuǎn)振動(dòng)呈現(xiàn)出周期性,但振動(dòng)速度幅值較小,約為0.8 m/s,主要是因?yàn)樾行羌苻D(zhuǎn)動(dòng)慣量較大。

圖4 差動(dòng)輪系太陽(yáng)輪位移動(dòng)態(tài)響應(yīng)曲線

圖5 差動(dòng)輪系行星輪位移動(dòng)態(tài)響應(yīng)曲線
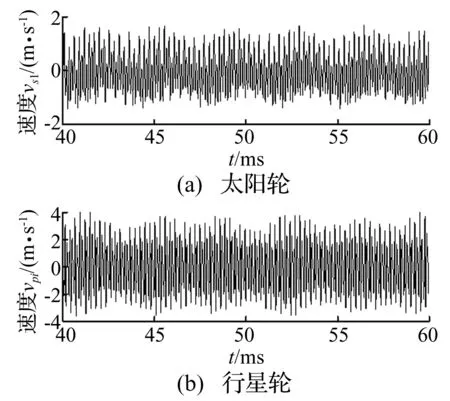
圖6 定軸輪系扭轉(zhuǎn)速度動(dòng)態(tài)響應(yīng)曲線
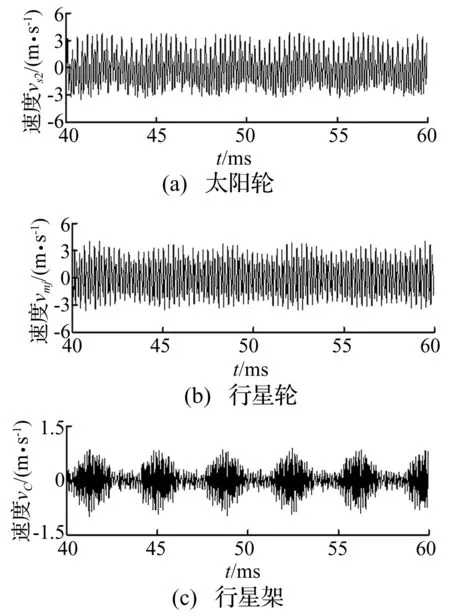
圖7 差動(dòng)輪系扭轉(zhuǎn)速度動(dòng)態(tài)響應(yīng)曲線
4.2 系統(tǒng)的均載特性
行星齒輪傳動(dòng)由于受各個(gè)齒輪偏心誤差與齒頻誤差的影響,每個(gè)行星輪承擔(dān)的載荷并不相等,通常用均載系數(shù)來(lái)表示,同時(shí)構(gòu)件是否浮動(dòng)也對(duì)載荷分配有影響。均載系數(shù)越大,行星齒輪系統(tǒng)的載荷分配越不均勻。將式(6)中得到的位移響應(yīng)代到式(3)中,得到彈性嚙合力Fs1pi,F(xiàn)r1pi,F(xiàn)s2mj和Fr2mj。令bspik1和bspik2分別為定軸輪系的在一個(gè)嚙頻周期內(nèi)外嚙合與內(nèi)嚙合的均載系數(shù),bsmjk1和brmjk2分別為差動(dòng)輪系的在一個(gè)嚙頻周期內(nèi)外嚙合與內(nèi)嚙合的均載系數(shù),則
(12)
式中:k1=1,2,…,n1;k2=1,2,…,n2,n1和n2分別為同軸對(duì)轉(zhuǎn)輪系定軸級(jí)與差動(dòng)級(jí)的嚙頻周期數(shù)。
由于定軸級(jí)或差動(dòng)級(jí)中行星輪的內(nèi)嚙合與外嚙合均載系數(shù)基本相等,因此本文中只比較定軸級(jí)和差動(dòng)級(jí)行星輪與太陽(yáng)輪嚙合的均載系數(shù)。由圖8和圖9可知,兩級(jí)均載系數(shù)呈現(xiàn)周期性波動(dòng),且定軸級(jí)的波動(dòng)幅值大于差動(dòng)級(jí)。定軸級(jí)的均載系數(shù)約為1.02,差動(dòng)級(jí)的均載系數(shù)約為1.01,差動(dòng)級(jí)比定軸級(jí)載荷分配更均勻。同時(shí)可以看出,在每對(duì)齒輪副偏心誤差和齒頻誤差取相等的條件下,定軸輪系比差動(dòng)輪系的載荷分配更加敏感。
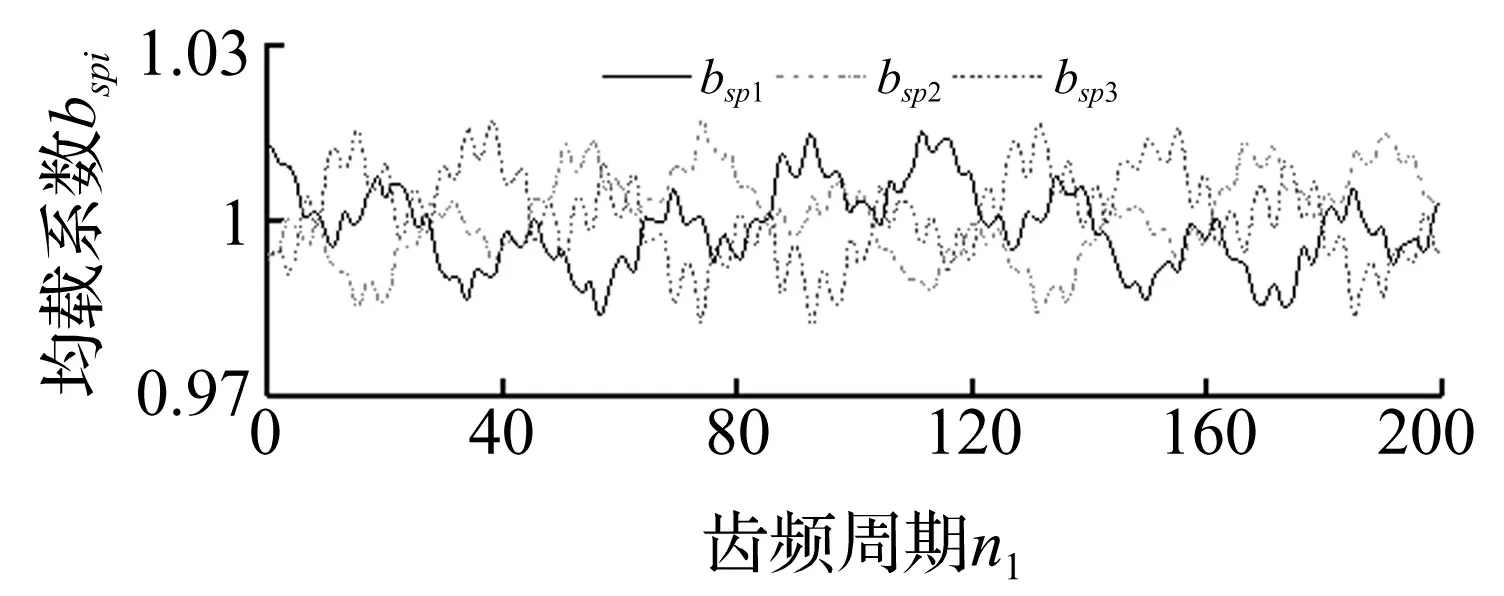
圖8 定軸輪系外嚙合各行星輪的均載系數(shù)
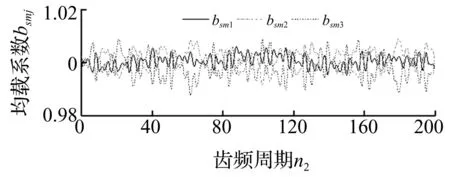
圖9 差動(dòng)輪系外嚙合各行星輪的均載系數(shù)
5 結(jié) 論
(1) 基于Lagrange方程采用集中參數(shù)法建立了同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)的動(dòng)力學(xué)方程,考慮了誤差激勵(lì)、剛度激勵(lì)和功率流對(duì)系統(tǒng)的影響,運(yùn)用數(shù)值分析方法求解了同軸對(duì)轉(zhuǎn)傳動(dòng)系統(tǒng)各個(gè)構(gòu)件的動(dòng)態(tài)響應(yīng)。
(2) 同軸對(duì)轉(zhuǎn)系統(tǒng)各個(gè)構(gòu)件的動(dòng)態(tài)響應(yīng)規(guī)律相似,但幅值大小不等。差動(dòng)輪系各個(gè)構(gòu)件沿嚙合線的位移響應(yīng)和速度響應(yīng)幅值都要高于定軸輪系,這是因?yàn)椴顒?dòng)輪系嚙合齒頻高,且分流了更多的功率。
(3) 定軸輪系的均載系數(shù)高于差動(dòng)輪系,載荷分配更加不均勻。在相等的誤差激勵(lì)下,定軸輪系與差動(dòng)輪系相比,誤差的敏感性更高。
參 考 文 獻(xiàn)
[1]Hidaka T, Sugimoto N, Ishida T. Effects of errors of elements on load distribution in planetary gears with various load equalizing mechanisms[J]. Japanese Mechanical Academic Society Collection, 1986, 52(480): 2200-2206.
[2]Kahraman A. Load sharing characteristics of planetary transmissions[J]. Mechanisms and Machine Theory, 1994, 29(8):1151-1165.
[3]Kahraman A. Static load sharing characteristics of transmission planetary gear sets: model and experiment[J]. SAE Transactions, 1999, 108(2): 1954-1963.
[4]Lin Jin, Parker R G. Analytical characterization of the unique properties of planetary gear free vibration [J]. Journal of Vibration and Acoustics, 1999, 121(3) :316-321.
[5]孫智民,沈允文,李素有. 封閉行星齒輪傳動(dòng)系統(tǒng)的動(dòng)態(tài)特性研究[J]. 機(jī)械工程學(xué)報(bào),2002,38(2):44-48.
SUN Zhi-min, SHEN Yun-wen, LI Su-you. Study on dynamic behavior of encased differential gear train [J]. Chinese Journal of Mechanical Engineering, 2002,38(2):44-48.
[6]陸俊華,朱如鵬,靳廣虎. 行星傳動(dòng)動(dòng)態(tài)均載特性分析[J]. 機(jī)械工程學(xué)報(bào),2009, 45(5):85-90.
LU Jun-hua, ZHU Ru-peng, JIN Guang-hu. Analysis of dynamic load sharing behavior in planetary gearing[J]. Chinese Journal of Mechanical Engineering, 2009, 45(5):85-90.
[7]秦大同,肖正明,王建宏. 基于嚙合相位分析的盾構(gòu)機(jī)減速器多級(jí)行星齒輪傳動(dòng)動(dòng)力學(xué)特性[J]. 機(jī)械工程學(xué)報(bào),2011,47(23):20-29.
QIN Da-tong , XIAO Zheng-ming, WANG Jian-hong. Dynamic characteristics of multi-stage planetary gears of Shield Tunneling Machine based on planet mesh phasing analysis[J]. Chinese Journal of Mechanical Engineering, 2011,47(23):20-29.
[8]秦大同,肖正明,王建宏,等. 盾構(gòu)機(jī)主減速器三級(jí)行星傳動(dòng)系統(tǒng)扭轉(zhuǎn)動(dòng)力學(xué)[J]. 中國(guó)機(jī)械工程,2010,21(18): 2176-2182.
QIN Da-tong , XIAO Zheng-ming, WANG Jian-hong , et al. Study on torsional dynamics of 3-stage planetary gears of main reducer used in driving cutter head of Shield Tunneling Machine. China Mechanical Engineering, 2010, 21(18):2176-2182.
[9]石萬(wàn)凱,張慶偉,秦大同. 同軸對(duì)轉(zhuǎn)減速機(jī)構(gòu)功率流分析[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2008, 39(5):165-168.
SHI Wan-kai, ZHANG Qing-wei, QIN Da-tong. Analysis on power flow of co-axial counter rotating reducer[J]. Transactions of the Chinese Society for Agricultural Machinery. 2008, 39(5):165-168.
[10]Shi Wankai, Li Liangjun, Qin Datong, et al. Analysis of power flow in a counter-rotating epicyclic gearing for electrical propulsion system[J].Journal of Mechanical Engineering Science, 2011, 225(12):2973-2980.
[11]Montestruc A N. Influence of planet pin stiffness on load sharing in planetary gear drives[J]. Journal of Mechanical Design, 2011, 133(1): 014501.
[12]Maatar M, Velex P. An analytical expression for the time-varying contact length in perfect cylindrical gears: Some possible applications in gear dynamics [J]. Journal of Mechanical Design, 1996, 118(12):586-589.
[13]李潤(rùn)方,王建軍. 齒輪系統(tǒng)動(dòng)力學(xué)[M]. 北京:科學(xué)出版社,1996.
