蝗蟲起跳運(yùn)動(dòng)分析及仿生機(jī)構(gòu)研究
2014-09-05 03:40:14甄永乾汪延成梅德慶陳子辰
振動(dòng)與沖擊 2014年2期
倪 虹, 甄永乾, 汪延成, 梅德慶, 陳子辰
(1.浙江大學(xué) 流體動(dòng)力與機(jī)電系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,杭州 310027;2.杭州師范大學(xué) 錢江學(xué)院 信息與機(jī)電工程分院,杭州 310036)
歷經(jīng)生存競(jìng)爭(zhēng),自然界生物進(jìn)化出良好的運(yùn)動(dòng)性能,可有效翻越障礙物、躲避天敵襲擊。隨生物軀體尺寸的減小,原平整的表面亦會(huì)變得崎嶇不平。因此,小型動(dòng)物多采用跳躍、飛行等運(yùn)動(dòng)方式,以提高越障能力及運(yùn)動(dòng)性能[1]。
近年來(lái),已有對(duì)青蛙[2]、蝗蟲[3-6]、葉蟬[7-8]、跳蛛[9]、跳蚤[10]等小型生物的跳躍運(yùn)動(dòng)進(jìn)行研究。Clark[3]研究表明,一只1.7 g的蝗蟲可利用8.65 mJ能量躍過0.95 m水平距離,且起跳速度高達(dá)3.2 m/s。而蝗蟲起跳階段能量主要來(lái)自跳躍足的肌肉儲(chǔ)能[3-4],其跳躍性能取決于儲(chǔ)能量及起跳階段的運(yùn)動(dòng)特性。因此,本文對(duì)蝗蟲起跳階段運(yùn)動(dòng)特性進(jìn)行研究,為仿生跳躍機(jī)構(gòu)設(shè)計(jì)提供依據(jù)。
對(duì)仿生跳躍機(jī)器人已有研究。Scarfogliero等[11]仿生蟋蟀后腿設(shè)計(jì)的跳躍機(jī)器人,采用偏心凸輪驅(qū)動(dòng)四桿機(jī)構(gòu)實(shí)現(xiàn)跳躍,并通過添加尾翼及柔性腿提高其起跳、落地的穩(wěn)定性;Yamakita等[12]模擬貓的蹬墻跳躍運(yùn)動(dòng),提出由兩四連桿機(jī)構(gòu)并聯(lián)構(gòu)成的跳躍機(jī)器人,將其等效為彈簧-質(zhì)量模型,并對(duì)跳躍過程中姿態(tài)調(diào)節(jié)進(jìn)行了仿真分析;Hvon等[13]研制的仿生狗單足跳躍機(jī)器人,將三根連桿作為跳躍腿,兩個(gè)液壓缸作為驅(qū)動(dòng)肌肉,彈簧模擬肌腱,通過壓縮彈簧提供推力實(shí)現(xiàn)跳躍,用繩索輔助機(jī)構(gòu)提高運(yùn)動(dòng)穩(wěn)定性。Wang等[2]仿生青蛙跳躍,研制出基于四連桿機(jī)構(gòu)的仿生跳躍機(jī)器人,跳躍高度相當(dāng)于其自身高度的3.5倍;陳殿生等[14]根據(jù)蝗蟲的翻身位姿調(diào)節(jié)過程,提出跳躍機(jī)器人翻身位姿調(diào)節(jié)機(jī)構(gòu),實(shí)現(xiàn)跳躍機(jī)器人翻轉(zhuǎn)功能;李霏等[15]通過仿生葉蟬的跳躍運(yùn)動(dòng),研制出Grillo小型機(jī)器人,并加裝兩翼以提高跳躍的穩(wěn)定性;Ni等[16]通過研究蝗蟲的跳躍機(jī)理,提出仿蝗蟲跳躍機(jī)構(gòu),并用運(yùn)動(dòng)學(xué)仿真分析對(duì)其結(jié)構(gòu)進(jìn)行優(yōu)化。
本文通過實(shí)驗(yàn)對(duì)蝗蟲起跳階段運(yùn)動(dòng)及力學(xué)特性研究結(jié)果表明,在起跳階段蝗蟲跳躍足力的輸出存在非線性。因此基于仿生蝗蟲運(yùn)動(dòng)與力學(xué)特性,提出仿蝗蟲跳躍機(jī)構(gòu)設(shè)計(jì)方案,進(jìn)行動(dòng)力學(xué)建模、分析,研制出仿蝗蟲跳躍機(jī)構(gòu)原理樣機(jī),并進(jìn)行實(shí)驗(yàn)研究。
1 蝗蟲跳躍運(yùn)動(dòng)實(shí)驗(yàn)
1.1 蝗蟲跳躍實(shí)驗(yàn)研究
據(jù)跳躍足在跳躍過程中與地面的接觸情況,蝗蟲跳躍全周期過程可分為起跳、騰空、著陸三階段,本文主要針對(duì)蝗蟲的起跳階段進(jìn)行研究。實(shí)驗(yàn)用蝗蟲為中華稻蝗(Oxya chinensis),見圖1,其身體異律分節(jié)成頭、胸、腹三個(gè)體區(qū),其中胸部為運(yùn)動(dòng)中心,有三對(duì)胸足、兩對(duì)翅。胸足分前足、中足、跳躍足,前足及中足主要用于爬行及調(diào)節(jié)跳躍姿態(tài),跳躍足主要實(shí)現(xiàn)跳躍。跳躍足分基節(jié)、轉(zhuǎn)節(jié)、腿節(jié)、脛節(jié)、趾節(jié)及前趾節(jié)六部分。本文所用兩只蝗蟲的質(zhì)量及身體各部幾何尺寸見表1。
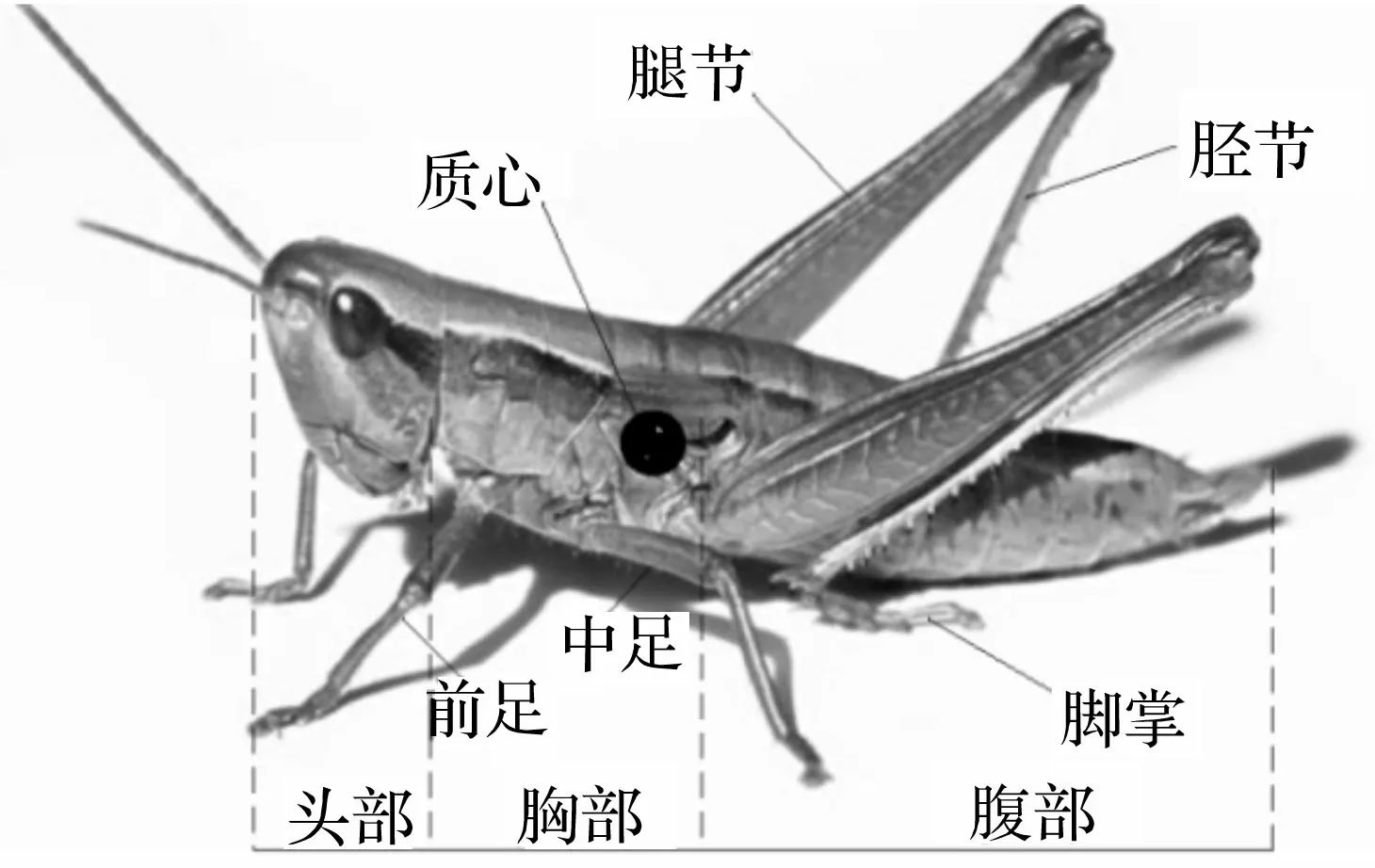
圖1 蝗蟲身體形態(tài)圖

表1 蝗蟲質(zhì)量及幾何尺寸測(cè)量值
搭建蝗蟲跳躍實(shí)驗(yàn)測(cè)試平臺(tái),見圖2。包括2個(gè)1 200 W恒光源、高速攝像機(jī)( MikrotronBLITZ Cube7)、圖像采集分析系統(tǒng)及蝗蟲。實(shí)驗(yàn)中,蝗蟲置于實(shí)驗(yàn)臺(tái)上,恒光源對(duì)準(zhǔn)蝗蟲以增強(qiáng)曝光,高速攝像機(jī)正向?qū)?zhǔn)蝗蟲側(cè)面以1 000 幀/s速度拍攝起跳階段運(yùn)動(dòng)軌跡圖像。

圖2 蝗蟲跳躍實(shí)驗(yàn)測(cè)試平臺(tái)
1.2 蝗蟲起跳階段實(shí)驗(yàn)數(shù)據(jù)分析
蝗蟲跳躍運(yùn)動(dòng)軌跡主要由起跳角、起跳階段跳躍足對(duì)地面作用力決定,起跳角為脛節(jié)與腳掌連接點(diǎn)及基節(jié)連線與地面夾角[17]。蝗蟲調(diào)節(jié)起跳角,主要通過前足、中足及跳躍足的協(xié)調(diào)運(yùn)動(dòng)實(shí)現(xiàn),即前足、中足調(diào)節(jié)身體高度,跳躍足繞基節(jié)轉(zhuǎn)動(dòng)調(diào)節(jié)起跳角大小。跳躍足對(duì)地面的作用力由肌肉收縮引起關(guān)節(jié)轉(zhuǎn)動(dòng)產(chǎn)生,該力隨時(shí)間變化特性決定起跳階段加速度特性。蝗蟲起跳階段對(duì)地面作用力的特性為,腳掌與地面接觸面積小,作用時(shí)間短,因而難以直接用傳感器準(zhǔn)確測(cè)量。利用高速攝像機(jī)捕獲蝗蟲起跳階段運(yùn)動(dòng)軌跡圖像,統(tǒng)計(jì)跳躍足起跳過程中關(guān)節(jié)轉(zhuǎn)角,包括脛節(jié)與地面夾角θ1、腿節(jié)與脛節(jié)夾角θ2、身體與腿節(jié)間夾角θ3;通過MATLAB擬合統(tǒng)計(jì)的實(shí)驗(yàn)數(shù)據(jù),獲得θ1,θ2,θ3在起跳階段的變化趨勢(shì);通過運(yùn)動(dòng)與力學(xué)特性分析,獲得蝗蟲起跳階段對(duì)地面的作用力。
圖3(a)、(b)為蝗蟲1第一組、第二組運(yùn)動(dòng)軌跡圖像,圖3(c)、(d)為蝗蟲2第一組、第二組運(yùn)動(dòng)軌跡圖像。對(duì)比發(fā)現(xiàn),雖蝗蟲1與蝗蟲2的身體質(zhì)量、尺寸等存在差異,但起跳階段的運(yùn)動(dòng)特性具相似性。蝗蟲的起跳階段持續(xù)約11 ms,前足、中足先離地面,跳躍足各關(guān)節(jié)繼續(xù)轉(zhuǎn)動(dòng)以提高速度直至跳躍足與地面解除約束。起跳階段,脛節(jié)與地面夾角θ1變化范圍基本一致,為0°~75°;腿節(jié)與脛節(jié)夾角θ2變化范圍基本一致,約10°~125°,且隨θ2的增大,腿節(jié)肌肉充分收縮并驅(qū)動(dòng)脛節(jié)運(yùn)動(dòng);身體與腿節(jié)間夾角θ3在前6 ms時(shí)角度基本不變,約145°,隨后逐漸增大至180°~220°。不同的蝗蟲,θ3在起跳階段變化范圍有所差別,主要由蝗蟲起跳角不同引起。在整個(gè)起跳階段,蝗蟲身體姿態(tài)與初始姿態(tài)始終保持一致。

圖3 蝗蟲起跳階段各關(guān)節(jié)轉(zhuǎn)角測(cè)量結(jié)果曲線
2 蝗蟲起跳階段運(yùn)動(dòng)分析
為研究蝗蟲起跳階段運(yùn)動(dòng)及力學(xué)特性,對(duì)蝗蟲進(jìn)行模型簡(jiǎn)化,見圖4。起跳階段,腳掌粘附于地面[18],將腳掌與脛節(jié)的連接簡(jiǎn)化為地面支撐點(diǎn)A;腿節(jié)與脛節(jié)連接處簡(jiǎn)化為點(diǎn)B;基節(jié)長(zhǎng)度較短,簡(jiǎn)化為腿節(jié)與身體間連接點(diǎn)C。蝗蟲通過跳躍足各關(guān)節(jié)的協(xié)調(diào)運(yùn)動(dòng)使前足、中足先離開地面,并依靠跳躍足產(chǎn)生的推力實(shí)現(xiàn)跳躍。因此,將蝗蟲簡(jiǎn)化為由身體、腿節(jié)、脛節(jié)三連桿組成的運(yùn)動(dòng)機(jī)構(gòu),桿件之間用平面旋轉(zhuǎn)副連接,蝗蟲質(zhì)心M位于中足與跳躍足之間[19]。設(shè)脛節(jié)、腿節(jié)、基節(jié)至質(zhì)心長(zhǎng)度記為l1,l2,l3;在關(guān)節(jié)A處建立直角坐標(biāo)系{0},關(guān)節(jié)B處建立坐標(biāo)系{1},關(guān)節(jié)C處建立坐標(biāo)系{2}。
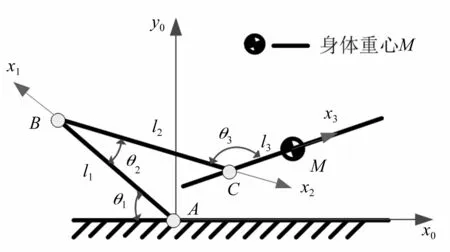
圖4 平面連桿機(jī)構(gòu)模型
質(zhì)心M在坐標(biāo)系{2}中的位置可表示為:
(1)
利用坐標(biāo)系間變換矩陣,質(zhì)心M在坐標(biāo)系{0}中位置可表示為:
p0=0T11T2P2=
式中:1T2,0T1為坐標(biāo)系{2}相對(duì)于坐標(biāo)系{1}、坐標(biāo)系{1}相對(duì)于坐標(biāo)系{0}的變換矩陣。
起跳階段蝗蟲質(zhì)心M在坐標(biāo)系{0}中位置為:
(3)
將起跳角記為α,對(duì)式(3)求解得質(zhì)心M位移Lcm、速度vcm、加速度acm及地面對(duì)質(zhì)心的作用力F:
(4)

圖5 蝗蟲質(zhì)心M運(yùn)動(dòng)曲線
將圖3中擬合的蝗蟲跳躍足各關(guān)節(jié)夾角數(shù)值代入式(3)、式(4),求解得質(zhì)心M運(yùn)動(dòng)軌跡、位移、速度、加速度及跳躍足對(duì)地面作用力,見圖5、圖6。在起跳階段,質(zhì)心M的運(yùn)動(dòng)軌跡近似直線(圖5(a)),表明蝗蟲起跳時(shí)起跳角恒定,且分別為65°,69°,76°,68°,跳躍足受地面作用力方向恒定。該特性有利于足部受力相同時(shí)能獲得最大沖量,從而獲得最大起跳速度(圖5(b)~圖5(d))。在四組跳躍中,蝗蟲起跳階段位移約25 mm,與自身長(zhǎng)度相當(dāng);且能獲得3~3.5 m/s的起跳速度,加速度隨時(shí)間逐漸增大,達(dá)峰值后迅速減小,最大加速度約400~600 m/s2。本文所得蝗蟲質(zhì)心位移、速度、加速度變化規(guī)律與文獻(xiàn)[3]用直接測(cè)量法對(duì)沙漠蝗(Schistocerca Gregaria)研究結(jié)果基本一致。
起跳階段,蝗蟲受地面作用力變化見圖6。開始時(shí)受地面作用力較小,隨后作用力平緩增大至峰值(0.17~ 0.23 N),再減小到零,受力峰值出現(xiàn)在起跳過程的后半段,約8 ms處。受地面作用力平緩增大特點(diǎn),有利于避免地面作用力突變所致肌肉損傷及疲勞破壞。
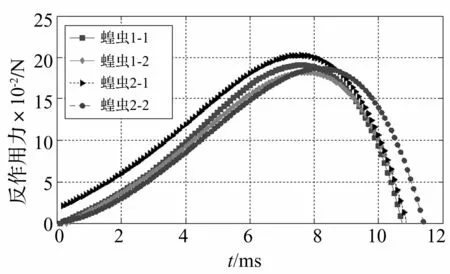
圖6 蝗蟲起跳階段跳躍足對(duì)地面作用力
3 仿生跳躍機(jī)構(gòu)設(shè)計(jì)及動(dòng)力學(xué)分析
3.1 仿生跳躍機(jī)構(gòu)設(shè)計(jì)
由蝗蟲起跳階段運(yùn)動(dòng)分析知,蝗蟲跳躍運(yùn)動(dòng)為腿部多桿件相互協(xié)調(diào)運(yùn)動(dòng)的結(jié)果,且質(zhì)心運(yùn)動(dòng)軌跡近似直線,起跳過程中身體姿勢(shì)始終與起跳初始階段保持一致。由于跳躍足的脛節(jié)與地面、腿節(jié)與脛節(jié)、身體與腿節(jié)之間存在平面內(nèi)相對(duì)轉(zhuǎn)動(dòng),因此,可等效為轉(zhuǎn)動(dòng)副約束;對(duì)蝗蟲質(zhì)心線性運(yùn)動(dòng)軌跡特性用單自由度滑動(dòng)副約束實(shí)現(xiàn)。本文在仿蝗蟲跳躍機(jī)構(gòu)設(shè)計(jì)中,采用1個(gè)滑動(dòng)副、3個(gè)轉(zhuǎn)動(dòng)副組合進(jìn)行機(jī)構(gòu)仿生設(shè)計(jì),見圖7。
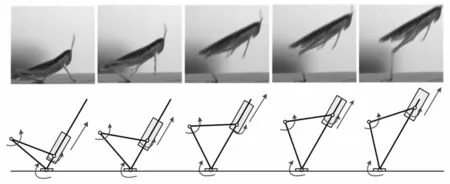
圖7 蝗蟲與仿生跳躍機(jī)構(gòu)起跳過程對(duì)比
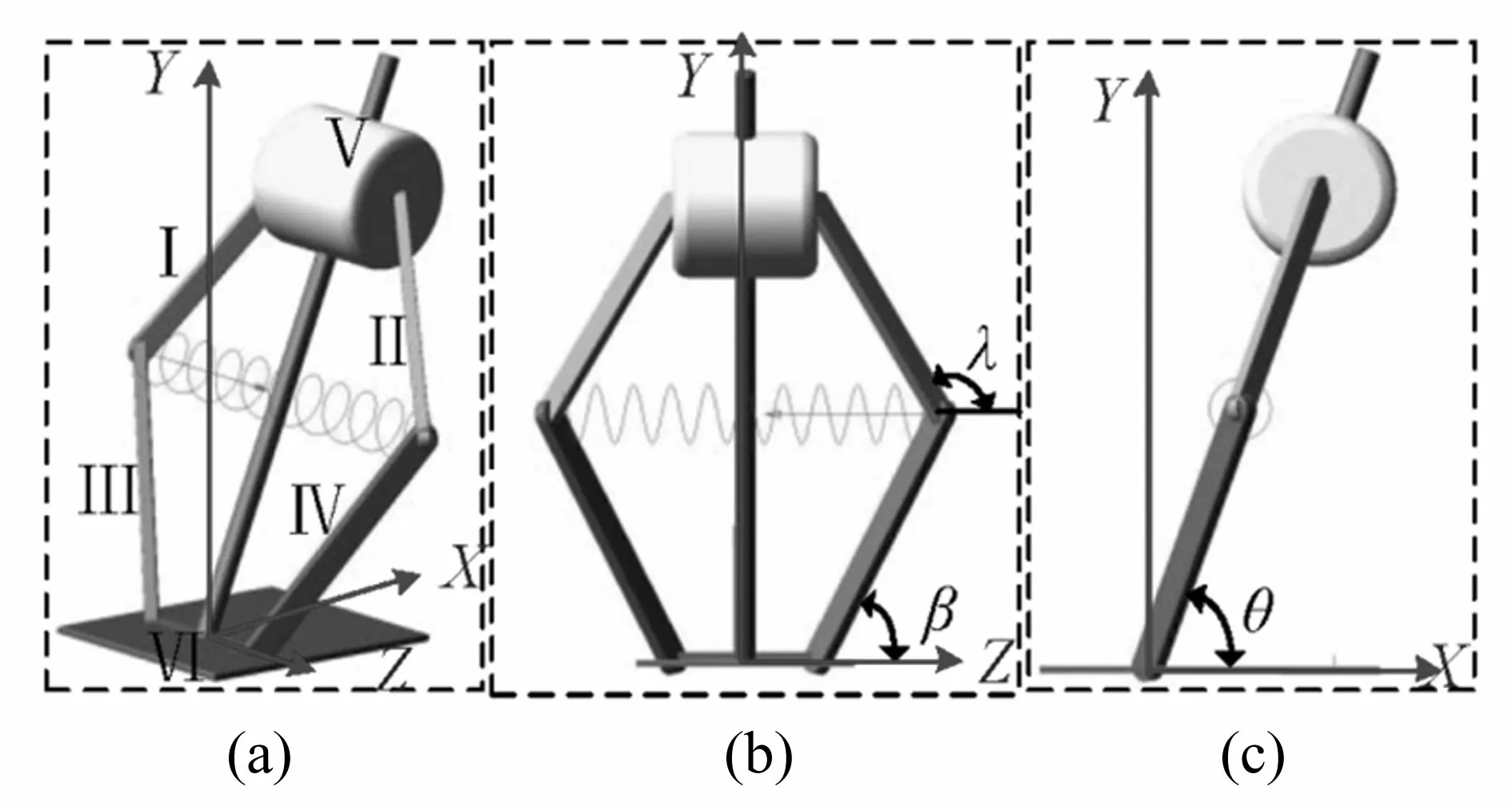
圖8 仿生跳躍機(jī)構(gòu)原理圖
仿生跳躍機(jī)構(gòu)原理見圖8,采用六連桿機(jī)構(gòu)作為腿部構(gòu)件,其中四連桿(Ⅰ、Ⅱ、Ⅲ、Ⅳ)等長(zhǎng)對(duì)稱布置,用螺旋彈簧儲(chǔ)能。為提高儲(chǔ)存量,螺旋彈簧兩端分別安裝在兩側(cè)連桿的鉸接處,以增大彈簧的拉伸長(zhǎng)度。該仿生跳躍機(jī)構(gòu)質(zhì)量記為m,Ⅰ、Ⅱ、Ⅲ、Ⅳ連桿質(zhì)量相等,記為m1;跳躍機(jī)構(gòu)起跳角為θ;連桿Ⅳ與Z軸夾角為β;Ⅱ與Z軸夾角為λ。
3.2 仿生跳躍機(jī)構(gòu)動(dòng)力學(xué)分析
為驗(yàn)證設(shè)計(jì)的仿生跳躍機(jī)構(gòu)在起跳階段具有與蝗蟲相似的運(yùn)動(dòng)學(xué)特性,對(duì)該機(jī)構(gòu)進(jìn)行動(dòng)力學(xué)分析。令廣義坐標(biāo)為仿生機(jī)構(gòu)彈射方向?yàn)閞方向,地面為零重力勢(shì)能面。連桿Ⅲ、Ⅳ繞銷軸的轉(zhuǎn)動(dòng)慣量為J1,J2;繞端點(diǎn)轉(zhuǎn)動(dòng)動(dòng)能為K1,K2;連桿Ⅰ、Ⅱ繞質(zhì)心轉(zhuǎn)動(dòng)慣量為J3,J4;轉(zhuǎn)動(dòng)動(dòng)能為K31,K41;平動(dòng)動(dòng)能為K32,K42,則仿生跳躍機(jī)構(gòu)質(zhì)心M的動(dòng)能T與勢(shì)能U分別為:
(5)
式中:a為頂部、底部桿長(zhǎng)度;b為兩側(cè)連桿長(zhǎng)度;l0為彈簧原長(zhǎng);k為彈簧剛度系數(shù);g為重力加速度。

(6)
當(dāng)機(jī)構(gòu)沿滑動(dòng)副向下運(yùn)動(dòng)至儲(chǔ)能結(jié)束時(shí),質(zhì)心距原點(diǎn)距離記為r0,此時(shí)速度為零,因此初始條件為:
(7)
據(jù)圖8仿生跳躍機(jī)構(gòu),Y軸方向位移y與X軸方向彈簧位移x之關(guān)系為:
(8)
由虛功原理Fydy=Fxdx,則有:
(9)
對(duì)圖8仿生跳躍機(jī)構(gòu)給定參數(shù):身體質(zhì)量m=0.23 kg;m1= 0.007 kg;彈簧剛度系數(shù)k= 1 N/mm;a= 40 mm;b= 60 mm;r(0) = 40 mm;θ= 80°;l0= 70 mm。代入式(6)、式(9),得仿生跳躍機(jī)構(gòu)質(zhì)心運(yùn)動(dòng)位移、速度、加速度及機(jī)構(gòu)對(duì)地面作用力。與蝗蟲2-2結(jié)果比較見圖9。圖9(a)~(c)與圖9(e)~(g)對(duì)比表明,仿蝗蟲跳躍機(jī)構(gòu)在起跳階段運(yùn)動(dòng)特性與蝗蟲相似,質(zhì)心加速度曲線為非線性;圖9(d)受力曲線顯示質(zhì)心受非線性力作用,表明通過腿部連桿式結(jié)構(gòu)設(shè)計(jì)及彈簧布置方式,拉伸彈簧產(chǎn)生的線性力能轉(zhuǎn)化為對(duì)地面的非線性作用力,能減緩足部與地面間所受瞬時(shí)作用力沖擊,由此獲得在起跳階段與蝗蟲相似的力學(xué)特性。
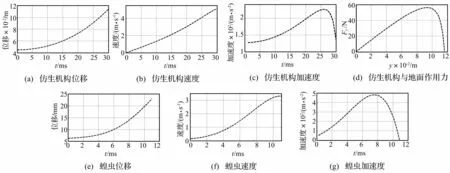
圖9 仿生跳躍機(jī)構(gòu)運(yùn)動(dòng)特性
4 仿生跳躍機(jī)構(gòu)原理樣機(jī)研制及實(shí)驗(yàn)研究
4.1 仿生跳躍機(jī)構(gòu)原理樣機(jī)研制
據(jù)設(shè)計(jì)的仿生跳躍機(jī)構(gòu)原型,制作仿生跳躍機(jī)構(gòu)原理樣機(jī),見圖10,高17 cm,質(zhì)量0.33 kg。該樣機(jī)由電機(jī)、減速裝置、能量存儲(chǔ)與釋放裝置、足部支撐裝置等組成。能量存儲(chǔ)、釋放裝置通過ESCAP電機(jī)驅(qū)動(dòng)滑塊上齒輪箱傳動(dòng)裝置,再通過齒輪箱中最后一級(jí)缺齒齒輪與固定在導(dǎo)軌兩端的齒條嚙合(圖10(b)),使整個(gè)樣機(jī)上身沿導(dǎo)軌向下運(yùn)動(dòng)拉伸彈簧實(shí)現(xiàn)能量存儲(chǔ)(圖10(c)),當(dāng)缺齒齒輪與齒條脫離嚙合時(shí),樣機(jī)在彈簧力的作用下實(shí)現(xiàn)跳躍。
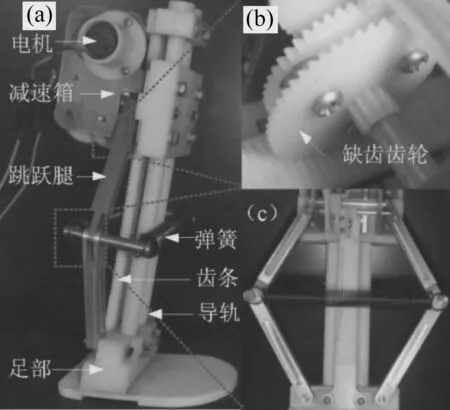
圖10 仿生跳躍機(jī)構(gòu)原理樣機(jī)實(shí)物照片
4.2 仿生跳躍機(jī)構(gòu)原理樣機(jī)跳躍實(shí)驗(yàn)研究
為研究樣機(jī)在起跳階段的運(yùn)動(dòng)特性、力學(xué)特性及跳躍性能,用高速攝像機(jī)捕獲樣機(jī)起跳階段的運(yùn)動(dòng)軌跡,見圖11,起跳階段持間約44 ms。圖11(a)為樣機(jī)儲(chǔ)能后姿態(tài),彈簧拉伸量達(dá)最大,由于缺齒齒輪作用,齒輪與齒條即將由嚙合狀態(tài)(圖11(b))過渡到非嚙合狀態(tài)(圖11(c)~ (f)),并釋放出彈簧儲(chǔ)存能量。
圖12實(shí)驗(yàn)結(jié)果表明:
(1) 樣機(jī)能有效仿生蝗蟲起跳階段的運(yùn)動(dòng)特性。用高速攝像可獲得樣機(jī)起跳階段的運(yùn)動(dòng)軌跡圖像,通過測(cè)量樣機(jī)上身位置隨時(shí)間變化的具體數(shù)值,可得該樣機(jī)在起跳階段位移隨時(shí)間變化曲線(圖12(a))。該曲線與圖12(d)中蝗蟲位移時(shí)間曲線及圖9(a)中仿生跳躍機(jī)構(gòu)理論分析所得位移時(shí)間曲線軌跡近似,表明該樣機(jī)在起跳階段能獲得與蝗蟲相似的位移特性。據(jù)樣機(jī)起跳階段位移隨時(shí)間的變化特性,用位移對(duì)時(shí)間一次微分,可得該樣機(jī)在起跳階段速度相對(duì)時(shí)間的變化曲線(圖12(b)),起跳瞬間速度為2.9 m/s,與實(shí)驗(yàn)研究中蝗蟲在起跳階段所得起跳速度3~3.5 m/s接近。據(jù)樣機(jī)起跳階段位移隨時(shí)間變化特性,用位移對(duì)時(shí)間二次微分,可得該樣機(jī)起跳階段加速度相對(duì)時(shí)間的變化曲線(圖12(c)),最大加速度約86 m/s2,出現(xiàn)于起跳后半段的29 ms時(shí)。該加速度特性曲線與圖12(f)中蝗蟲加速度特性曲線軌跡近似,表明該樣機(jī)在起跳階段能獲得與蝗蟲相似的加速度特性。
(2)樣機(jī)能有效仿生蝗蟲起跳階段的力學(xué)特性。由于該仿生樣機(jī)質(zhì)量恒定,地面作用力為加速度與質(zhì)量的乘積。因此,圖12(c)中加速度曲線特性即反映樣機(jī)起跳階段對(duì)地面作用力曲線特性。在開始階段,該樣機(jī)受地面作用力較小,逐漸增大至峰值后迅速減小至零,且受力峰值出現(xiàn)在起跳的后半段。該受地面作用力的變化特性與圖6中蝗蟲起跳階段力的變化特性及圖9(d)中仿生機(jī)構(gòu)設(shè)計(jì)理論計(jì)算所得力的變化特性一致。
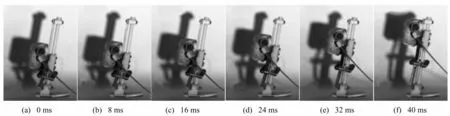
圖11 仿生跳躍原理樣機(jī)起跳階段運(yùn)動(dòng)軌跡圖像

圖12 仿生跳躍機(jī)構(gòu)原理樣機(jī)起跳階段運(yùn)動(dòng)特性
為研究該樣機(jī)跳躍性能,利用高速攝像機(jī)捕獲樣機(jī)跳躍過程運(yùn)動(dòng)軌跡圖像,見圖13。實(shí)驗(yàn)結(jié)果表明,該樣機(jī)的跳躍高度可達(dá)22 cm,相當(dāng)于自身高度的129%。圖13(a)為該樣機(jī)在儲(chǔ)能完畢后的位姿,起跳角為80°,圖13(b)~(g)為樣機(jī)騰空階段姿態(tài)隨時(shí)間的變化。由于起跳角固定為80°,故該樣機(jī)主要實(shí)現(xiàn)向上的運(yùn)動(dòng),通過調(diào)節(jié)起跳角大小可調(diào)節(jié)跳躍高度及向前位移。
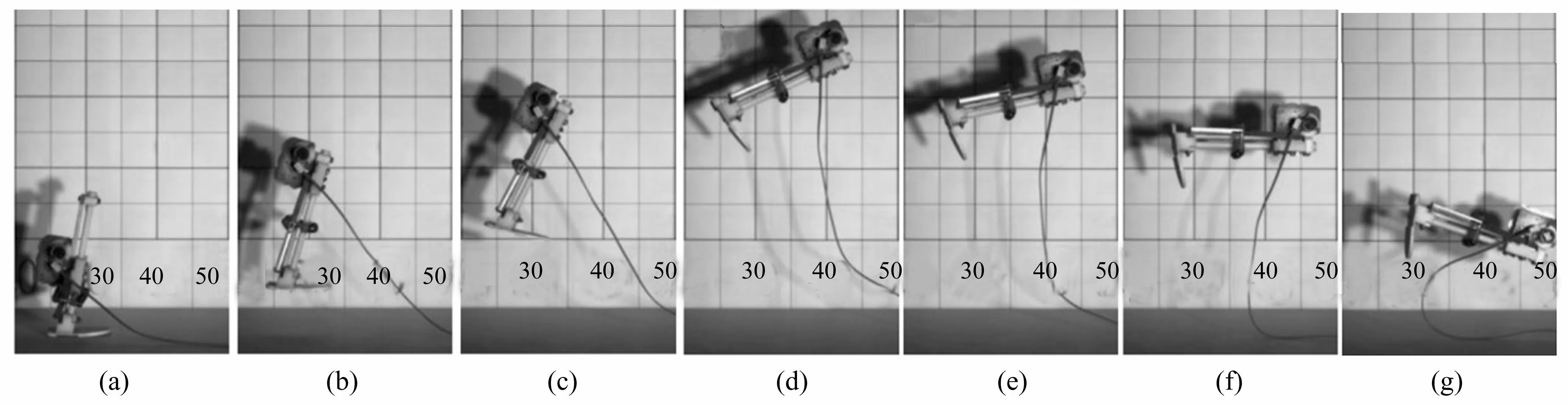
圖13 仿生跳躍機(jī)構(gòu)跳躍過程高速攝像圖
5 結(jié) 論
(1) 對(duì)蝗蟲起跳階段運(yùn)動(dòng)特性進(jìn)行研究,利用高速攝像機(jī)捕獲蝗蟲起跳階段運(yùn)動(dòng)軌跡圖像,并通過統(tǒng)計(jì)分析獲得該階段蝗蟲跳躍足各關(guān)節(jié)的運(yùn)動(dòng)曲線。
(2) 對(duì)蝗蟲起跳階段進(jìn)行運(yùn)動(dòng)學(xué)分析結(jié)果顯示,其質(zhì)心運(yùn)動(dòng)軌跡可近似為直線,表明蝗蟲起跳角恒定,其跳躍足對(duì)地面作用力方向恒定,該特性有利于獲得最大起跳速度。
(3) 通過對(duì)仿蝗蟲跳躍機(jī)構(gòu)設(shè)計(jì)方案的動(dòng)力學(xué)分析表明,該仿生跳躍機(jī)構(gòu)可實(shí)現(xiàn)與蝗蟲在起跳階段相似的運(yùn)動(dòng)及力學(xué)特性。
(4) 通過對(duì)仿生跳躍機(jī)構(gòu)原理樣機(jī)的研制及實(shí)驗(yàn)結(jié)果表明,該樣機(jī)在起跳階段能實(shí)現(xiàn)與蝗蟲相似的運(yùn)動(dòng)特性,跳躍高度為自身高度的129%。
參 考 文 獻(xiàn)
[1]Scarfogliero U, Li F, Chen D J, et al. Jumping mini-robot as a model of scale effects on legged locomotion [C]//Proceeding of IEEE International Conference on Robotics and Biomimetics, 2007: 853-858.
[2]Wang M, Zang X Z, Fan J Z, et al. Biological jumping mechanism analysis and modeling for frog robot[J]. Journal of Bionic Engineering, 2008, 5(3):181-188.
[3]Clark H. The energetic of the jump of the locust schistocerca gregaria [J]. Journal of Experimental Biology,1975,63(1):53-83.
[4]Cochrane D, Elder H, Usherwood P. Physiology and ultrastructure of phasic and tonic skeletal musclefibers in the locust,schistocerca gregaria [J]. Journal of Cell Science, 1972, 10: 419-441.
[5]Burrows M, Morris G. The kinematics and neural control of high speed kicking movements in the locust[J]. Journal of Experimental Biology, 2001, 204: 3471-3481.
[6]楊繪宇, 王石剛, 梁慶華,等. 仿蝗蟲跳躍機(jī)器人起跳過程運(yùn)動(dòng)學(xué)建模及分析 [J]. 機(jī)械設(shè)計(jì), 2010, 27(4): 54-57.
YANG Hui-yu, WANG Shi-gang, LIANG Qing-hua, et al. Kinematic modeling and analysis of the take-off procedure of locust-like hopping robot [J]. Journal of Machine Design, 2010, 27(4): 54-57.
[7]Burrows M. Kinematics of jumping in leafhopper insects (hemiptera, auchenorrhyncha, cicadellidae)[J]. Journal of Experimental Biology, 2007, 210(20): 3579-3589.
[8]Burrows M. Anatomy of the hind legs and actions of their muscles during jumping in leafhopper insects[J]. Journal of Experimental Biology, 2007, 210(20): 3590-3600.
[9]Parry D, Brown R. The jumping mechanism of salticid spiders [J]. Journal of Experimental Biology,1959, 36: 654-664.
[10]Clark H. The jump of the flea: a study of energetic and a model of the mechanism [J]. Journal of Experimental Biology, 1967, 47: 59-76.
[11]Scarfogliero U, Stefanini C, Dario P. The use of compliant joints and elastic energy storage in bio-inspired legged robots [J]. Mechanism and Machine Theory, 2009, 44(3): 580-590.
[12]Yamakita M, Omagari Y, Taniguchi Y.Jumping cat robot with kicking a wall[J]. Journal of the Robotics Society of Japan, 1994, 9: 934-942.
[13]Hyon S H, Mita T. Development of a biologically inspired hopping robot-kenken[J].Proceedings of the IEEE International Conference on Robotics and Automation, 2002,4:3984-3991.
[14]陳殿生, 鄭萬(wàn)軍, 黃 宇,等. 彈跳機(jī)器人翻轉(zhuǎn)機(jī)構(gòu)的設(shè)計(jì)與優(yōu)化[J]. 機(jī)械工程學(xué)報(bào), 2011, 47(1): 17-23.
CHEN Dian-sheng, ZHENG Wan-jun,HUANG Yu,et al. The design and optimization of a hopping robot’s tipping mechanism [J]. Journal of Mechanical Engineering, 2011, 47(1): 17-23.
[15]Li F, Liu W T, Fu X, et al. Jumping like an insect: desian and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration[J].Mechatronics, 2012,22(2):167-176.
[16]Ni H, Mei D Q, Zhen Y Q, et al. Design and analysis of bionic jumping leg inspired from locust's jumping mechanism[J]. Advanced Science Letters, 2012, 12(1): 68-72.
[17]Sutton G P, Burrows M. The mechanics of elevation control in locust jumping[J]. Journal of Comparative Physology, 2008, 194(6): 557-563.
[18]Dai Z D, Stanislav G. Contact mechanics of pad of grasshopper (insecta:orthoptera) by finite element methods [J].Chinese Science Bulletin, 2009, 54(4): 549-555.
[19]Chen D S, Yin J M, Zhao K, et al. Bionic mechanism and kinematics analysis of hopping robot inspired by locust jumping[J].Journal of Bionic Engineering,2011,8(4):429-439.
