基于小波變換和陀螺的高旋彈角運(yùn)動(dòng)測(cè)量技術(shù)
2014-08-30 09:22:20楊登紅李東光申強(qiáng)曾廣裕楊瑞偉
哈爾濱工程大學(xué)學(xué)報(bào) 2014年10期
楊登紅,李東光,申強(qiáng),曾廣裕,楊瑞偉
(北京理工大學(xué)機(jī)電動(dòng)態(tài)控制重點(diǎn)實(shí)驗(yàn)室,北京100081)
高旋彈的俯仰角速度、偏航角速度和滾轉(zhuǎn)角速度的變化率低,但其滾轉(zhuǎn)角速度很大,可達(dá)300 r/s,直接用陀螺難以測(cè)量如此高的角速度。本文通過(guò)對(duì)高旋彈角運(yùn)動(dòng)特性進(jìn)行分析研究發(fā)現(xiàn),以俯仰軸為敏感軸安裝的低量程陀螺所敏感的角速度由俯仰、偏航和滾轉(zhuǎn)角速度耦合而成,其大小主要由俯仰角速度決定,由于俯仰角速度較小,所以耦合角速度較小,因此利用低量程陀螺可以測(cè)量該耦合角速度。對(duì)該耦合角速度進(jìn)行小波濾波即可獲得光滑耦合角速度曲線,在短時(shí)間內(nèi),該曲線可近似為正弦曲線,利用正弦曲線過(guò)零點(diǎn)和極值點(diǎn)即可計(jì)算高旋彈的俯仰角速度、滾轉(zhuǎn)角速度和滾轉(zhuǎn)角。因此,本文提出一種基于小波變換和低量程陀螺的高旋彈角運(yùn)動(dòng)參數(shù)測(cè)量方法,利用低量程陀螺測(cè)量高旋彈耦合角速度,再利用小波變換濾波獲得光滑曲線,然后利用正弦曲線過(guò)零點(diǎn)和極值點(diǎn)計(jì)算高旋彈的俯仰角速度、滾轉(zhuǎn)角速度和滾轉(zhuǎn)角。
1 彈體耦合角運(yùn)動(dòng)信號(hào)特性研究
1.1 彈體角運(yùn)動(dòng)耦合
采用低量程陀螺測(cè)量彈體俯仰角運(yùn)動(dòng)時(shí),陀螺在彈體上的安裝方式如圖1所示,圖中Xb、Yb、Zb軸為彈體坐標(biāo)系的3個(gè)軸,彈體旋轉(zhuǎn)軸為Xb軸、陀螺敏感軸為Zb、感受角速度為ωbz。
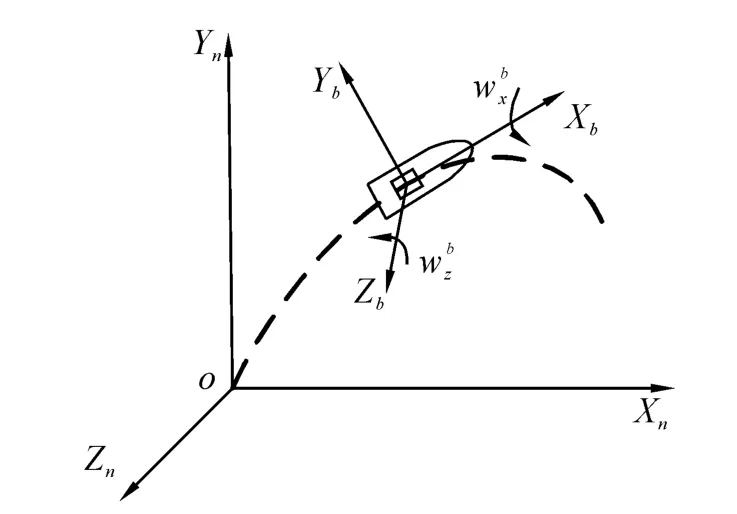
圖1 低量程陀螺安裝位置及敏感軸示意圖Fig.1 The installation of the low-range gyro and its measurement axes
陀螺受到彈體滾轉(zhuǎn)運(yùn)動(dòng)和偏航運(yùn)動(dòng)的影響,測(cè)量信號(hào)受到滾轉(zhuǎn)角速度和偏航角速度調(diào)制,根據(jù)旋轉(zhuǎn)彈體坐標(biāo)系、非旋轉(zhuǎn)彈體坐標(biāo)系與地面慣性坐標(biāo)轉(zhuǎn)換關(guān)系可得

1.2 耦合參數(shù)特性
如式(1)所示低量程陀螺所測(cè)彈體角速度ωbz、受到俯仰角θ、俯仰角速度、滾轉(zhuǎn)角φ和偏航角速度的影響,需要分析這些參數(shù)對(duì)耦合角速度ωbz的影響。
式(1)可根據(jù)三角函數(shù)關(guān)系改寫(xiě)為

可見(jiàn),在短時(shí)間內(nèi),A和φ+ζ可視為常數(shù),則耦合角速度信號(hào)近似成以A為幅值、φ+ζ為相位的周期信號(hào)。
選取初速為900 m/s、射角為45°且隨機(jī)風(fēng)干擾很大的彈體角運(yùn)動(dòng)數(shù)據(jù)進(jìn)行分析,得到結(jié)果如圖2~5所示。
可見(jiàn),俯仰角、偏航角和滾轉(zhuǎn)角變化均比較緩慢,俯仰角速度和偏航角速度較小,且其變化率也較小,但在彈道始端和末端都有相對(duì)劇烈的變化,這些變化對(duì)小波分析有較大的影響。由圖5可以看出,滾轉(zhuǎn)耦合角運(yùn)動(dòng)變化曲線的包絡(luò)變化趨勢(shì)與俯仰角速度變化趨勢(shì)相同,信號(hào)頻率和滾轉(zhuǎn)角速度相符,由局部放大圖看出,耦合信號(hào)中具有明顯的周期特性。
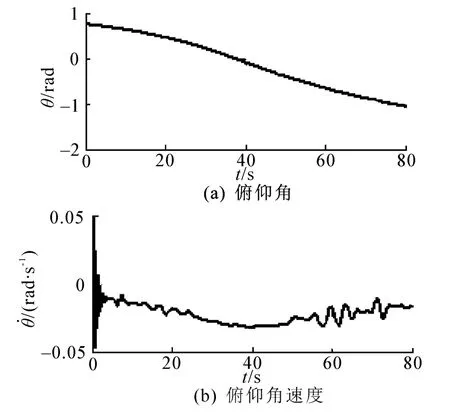
圖2 俯仰角及俯仰角速度曲線Fig.2 The pitch angle and pitch rate curve
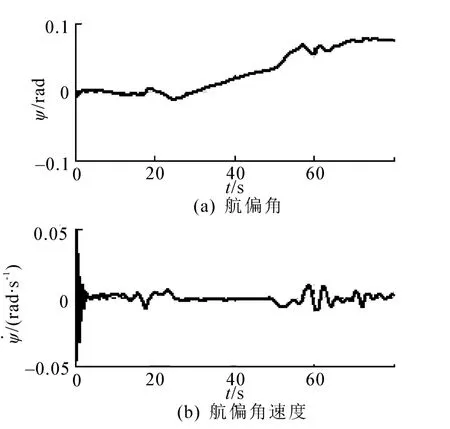
圖3 偏航角及偏航角速度曲線Fig.3 The yaw angle and yaw rate curve
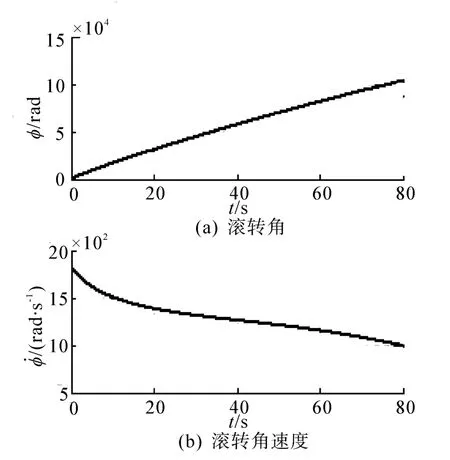
圖4 滾轉(zhuǎn)角及滾轉(zhuǎn)角速度曲線Fig.4 The roll angle and roll rate curve
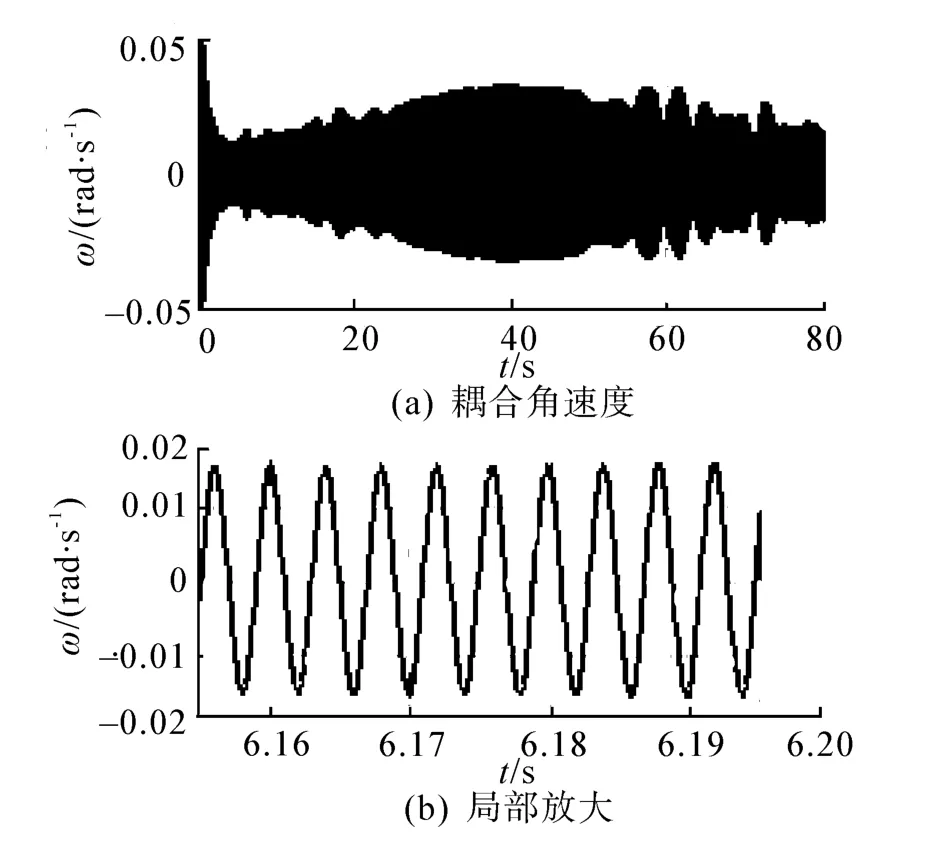
圖5 耦合角速度及局部放大曲線Fig.5 The coupled angular rate and its partial curve
基于上述高旋彈耦合角速度信號(hào)的誤差特性如圖6所示。
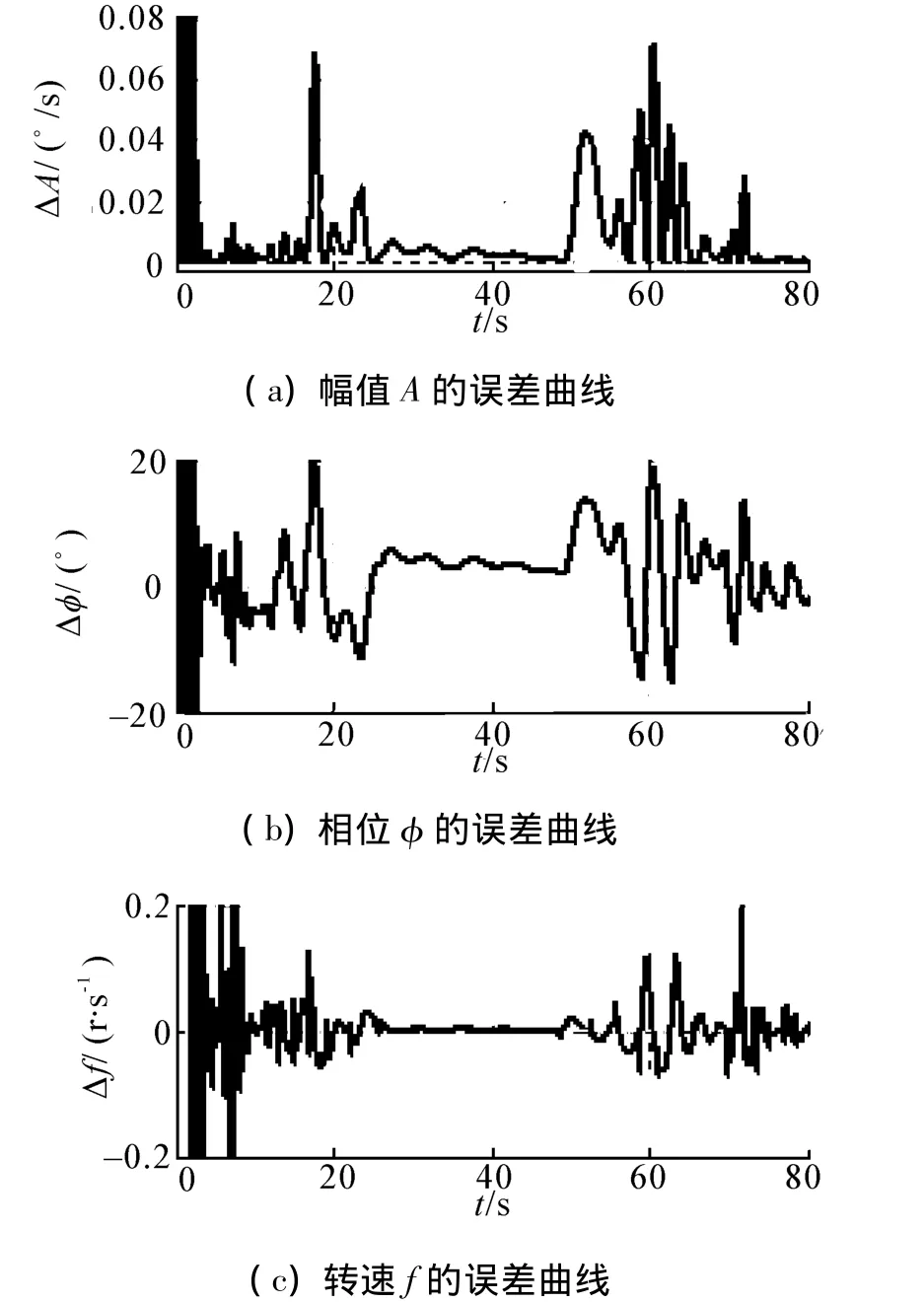
圖6 耦合信號(hào)誤差特性曲線Fig.6 The error characteristic curve of coupled signal
耦合信號(hào)幅值與俯仰角速度之差為 ΔA=,以幅值A(chǔ)作為高旋彈俯仰角速度時(shí),其誤差為 ΔA的大小如圖所示,可到0.08(°)/s范圍內(nèi),若對(duì)隨機(jī)風(fēng)進(jìn)行處理,誤差可以更小;由高旋彈角速度耦合產(chǎn)生的耦合相位為Δφ,由于隨機(jī)風(fēng)的干擾,該耦合相位較大,但隨機(jī)風(fēng)較小時(shí),相位差值可達(dá)5°范圍之內(nèi),以耦合信號(hào)相位φ+ζ作為彈體滾轉(zhuǎn)角φ時(shí),誤差由Δφ即ζ決定;若以耦合角速度信號(hào)頻率f=作為滾轉(zhuǎn)角速度時(shí),滾轉(zhuǎn)角速度誤差為Δfcos2θ),實(shí)際誤差小于 0.2r/s。可見(jiàn),利用正弦曲線的過(guò)零點(diǎn)和極值點(diǎn)計(jì)算式(2)所示三角函數(shù)的幅值、相位和頻率并分別作為彈體俯仰角速度、滾轉(zhuǎn)角速度和滾轉(zhuǎn)角φ,誤差大小在上述范圍內(nèi),因此采用正弦曲線的過(guò)零點(diǎn)和極值點(diǎn)計(jì)算相關(guān)角運(yùn)動(dòng)參數(shù)是可行的。因此本文提出的利用低量程陀螺測(cè)量耦合信號(hào)ωbz,選取合適的濾波方法對(duì)信號(hào)進(jìn)行濾波處理,得到較為精確的測(cè)量值,再利用正弦曲線特性和過(guò)零相位檢測(cè)法獲取信號(hào)的幅值、相位及頻率,從而獲取彈體飛行俯仰角速度、滾轉(zhuǎn)角速度和滾轉(zhuǎn)角φ的角運(yùn)動(dòng)參數(shù)測(cè)量方法是合理的。
2 小波變換及其應(yīng)用特性
小波變換由時(shí)域與時(shí)間-尺度域之間的變換和反變換組成,小波分解變換過(guò)程中,原始信號(hào)被不同尺度分解到尺度空間和小波空間,利用分解信號(hào)可將不同頻帶的信號(hào)進(jìn)行重構(gòu),并在時(shí)域中直接觀察,因此,小波變換又被稱(chēng)為時(shí)頻特性良好的線性變換,在信號(hào)基波提取和頻率測(cè)量上具有獨(dú)到的優(yōu)勢(shì)[1-2]。若設(shè)原始信號(hào)f(t)的頻段為(0~f)Hz,則原始信號(hào)的小波分解如圖7(a)所示,其中,a0(k)為原始信號(hào)f(t)的采樣序列f(k),算符“↓2”表示基2的下采樣,每經(jīng)過(guò)一層小波分解,信號(hào)頻帶的尺度減半。小波分解后,可以對(duì)不同頻帶信號(hào)進(jìn)行重構(gòu),小波重構(gòu)過(guò)程如圖7(b)所示。
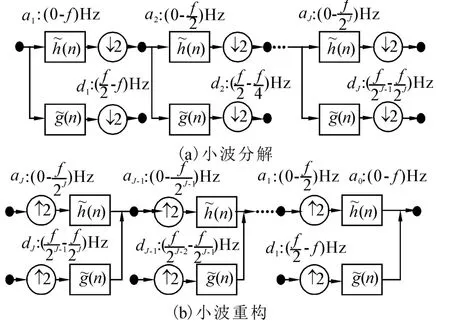
圖7 小波分解與小波重構(gòu)結(jié)構(gòu)圖Fig.7 Wavelet decomposition and wavelet reconstruction block diagram
在信號(hào)重構(gòu)前,可以對(duì)某些特定的高頻系數(shù)置0,可以濾除高頻成分,實(shí)現(xiàn)信號(hào)去噪,也可以對(duì)某特定頻段外的系數(shù)置0,實(shí)現(xiàn)信號(hào)帶通或帶阻濾波[2]。
小波濾波器具有線性相位特性[2],其相位滯后與信號(hào)頻率呈線性關(guān)系,實(shí)際應(yīng)用中根據(jù)所設(shè)計(jì)或選用基小波的相位特性和實(shí)際信號(hào)頻率對(duì)相位測(cè)量結(jié)果進(jìn)行相位補(bǔ)償,得到較為精確的相位測(cè)量結(jié)果。
3 高旋彈體運(yùn)動(dòng)參數(shù)測(cè)量方法
低量程陀螺測(cè)量彈體耦合角運(yùn)動(dòng)的模型如式(2)所示,可以看出耦合信號(hào)具有明顯的周期特性,在短時(shí)間內(nèi)具有線性的頻率變化和相位變化,通過(guò)對(duì)測(cè)量信號(hào)進(jìn)行小波濾波可以獲取光滑的耦合角運(yùn)動(dòng)曲線,該曲線為近似正弦函數(shù)曲線,可分段作為正弦曲線處理。
文獻(xiàn)[3]中采用極值法檢測(cè)小波變換得到基波頻率,雖然極值法原理簡(jiǎn)單,計(jì)算方便,但其對(duì)采樣頻率要求較高,而且非周期采樣時(shí)的重構(gòu)基波誤差極易造成極值誤差和極點(diǎn)漂移,影響算法測(cè)頻精度。文獻(xiàn)[4]采用過(guò)零法檢測(cè)基波頻率,與極值法類(lèi)似,過(guò)零法的檢測(cè)精度也受采樣頻率的影響,容易出現(xiàn)零點(diǎn)漂移。本文將過(guò)零法和極值法結(jié)合,充分利用正弦曲線過(guò)零點(diǎn)和極值點(diǎn)獲取基波特征,計(jì)算出基波對(duì)應(yīng)點(diǎn)的頻率、幅值和相位。
因此,本文在利用小波濾波獲取一定頻帶的基波的基礎(chǔ)上,利用正弦曲線過(guò)零點(diǎn)和極值點(diǎn)計(jì)算對(duì)應(yīng)點(diǎn)的幅值、頻率和相位,并根據(jù)相關(guān)參數(shù)特性對(duì)計(jì)算結(jié)果進(jìn)行平滑濾波,得到角運(yùn)動(dòng)耦合信號(hào)的幅值A(chǔ)、頻率f和相位φ的測(cè)量值,對(duì)幅值、頻率和相位進(jìn)行一階插值,得到幅值、頻率和相位序列,再根據(jù)實(shí)測(cè)頻率計(jì)算相位校正量,對(duì)相位進(jìn)行校正。
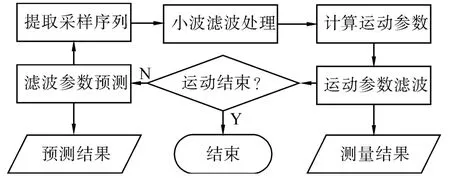
圖8 角運(yùn)動(dòng)參數(shù)測(cè)量過(guò)程Fig.8 Angle motion parameters measuring procedure
選取初速為900 m/s、射角為45°且隨機(jī)風(fēng)干擾較大的彈體角運(yùn)動(dòng)數(shù)據(jù)采用上述角運(yùn)動(dòng)參數(shù)測(cè)量方法進(jìn)行分析,得到結(jié)果如圖9~12所示。
其中,圖9為利用小波分析對(duì)耦合角運(yùn)動(dòng)信號(hào)濾波后得到的結(jié)果,ω為耦合角速度,Δω小波濾波濾除的干擾,可見(jiàn),小波濾波有效濾除了信號(hào)中的干擾。
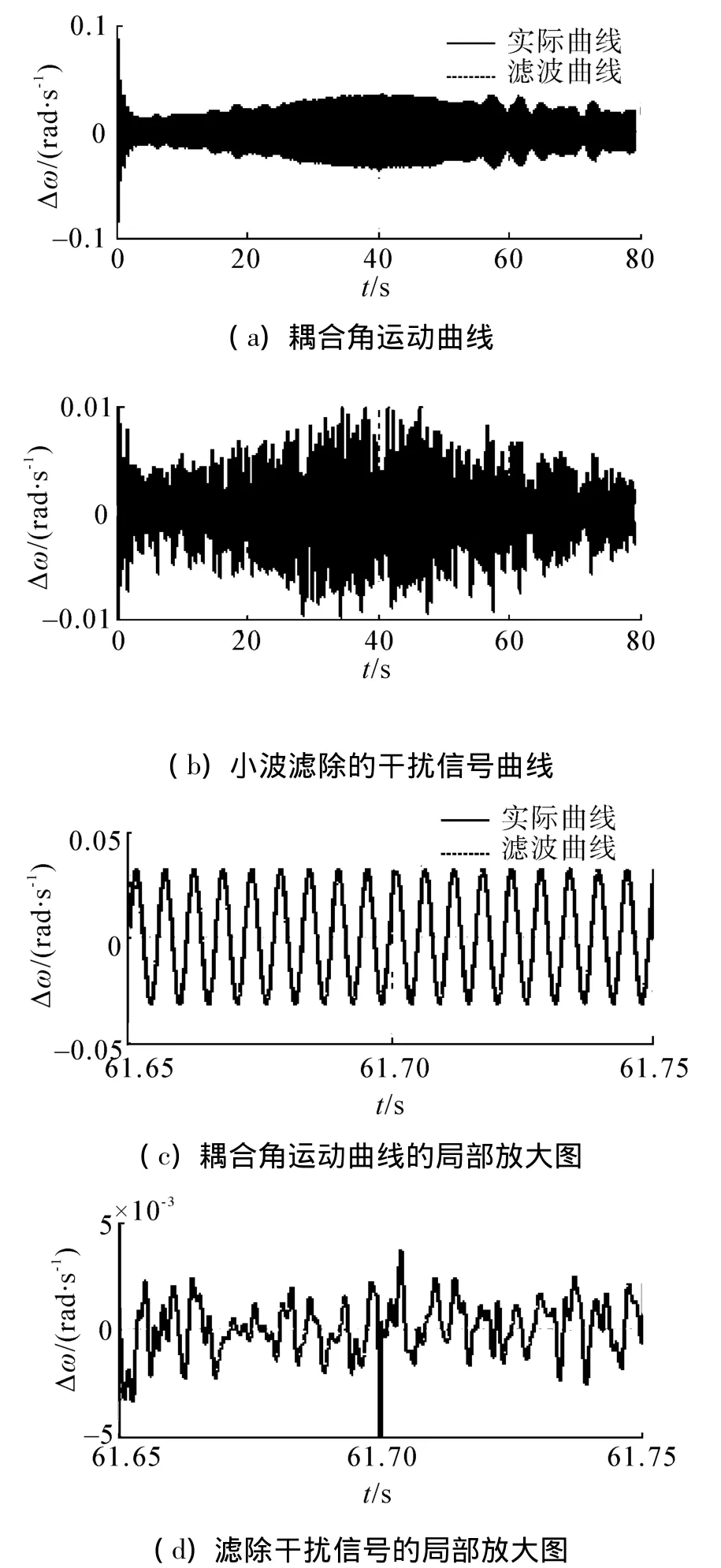
圖9 角運(yùn)動(dòng)耦合信號(hào)和濾除噪聲及局部曲線Fig.9 Coupled angular motion signal and the flitted noise with wavelet filter and its partial curve
圖11為俯仰角速度測(cè)量結(jié)果及其測(cè)量誤差,可見(jiàn),俯仰角速度最大測(cè)量誤差為1.1×10-3rad/s,即0.063(°)/s,相對(duì)精度達(dá)3.6%;圖12 為滾轉(zhuǎn)角測(cè)量結(jié)果及其局部放大,可見(jiàn),滾轉(zhuǎn)角測(cè)量誤差在2°以內(nèi)。
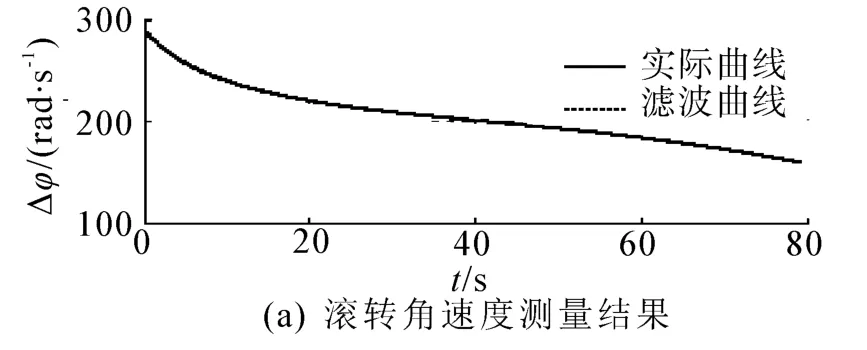
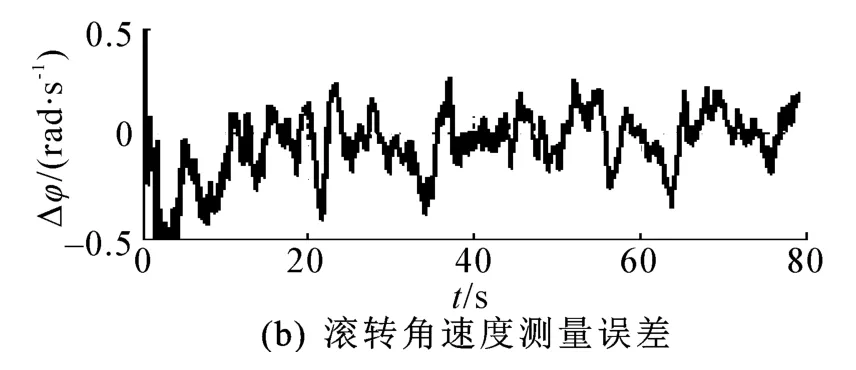
圖10 轉(zhuǎn)速測(cè)量結(jié)果圖Fig.10 The roll rate measurement results

圖11 俯仰角速度測(cè)量結(jié)果Fig.11 The pitch rate measurement results
圖12 相位測(cè)量結(jié)果及局部曲線Fig.12 The rotation phase measurement results and its partial curve
4 結(jié)束語(yǔ)
[1]應(yīng)展烽,吳軍基,易文俊.基于小波變換和三點(diǎn)法的基波頻率測(cè)量[J].電機(jī)與控制學(xué)報(bào),2010,14(2):65-70.YING Zhanfeng,WU Junji,YI Wenjun.Study on frequency detection based on wavelet transform and three-points algorithm[J].Electric Machines and Control,2010,14(2):65-70.
[2]范延濱,潘振寬,王正彥.小波理論算法與濾波器組[M].北京:科學(xué)出版社,2011:50-86.FAN Yanbin,PAN Zhenkuan,WANG Zhengyan.Wavelet transform algorithm and filter bank[M].Beijing:Science Press,2011:50-86.
[3]王肖芬,徐科軍.基于小波變換的基波提取和頻率測(cè)量[J].儀器儀表學(xué)報(bào),2005,26(2):146-151.WANG Xiaofen,XU Kejun.Fundamental wave extraction and frequency measurement based on wavelet transform[J].Chinese Journal of Scientific Instrumentation,2005,26(2):146-151.
[4]金華烽,何奔.電力系統(tǒng)頻率的實(shí)時(shí)估算[J].繼電器,1998,26(3):17-20.JING Huafeng,HE Ben.Real estimation of power system frequency[J].Relay,1998,26(3):17-20.
[5]JAMES G H,CARNE T G,LAUFFER J P.The natural excitation technique(NEXT)for modal parameter extraction from operating structures[J].Int J Anal Exp Modal Anal,1995(10):260-277.
[6]LIU K,DENG L.Experimental veri fi cation of an algorithm for identi fi cation of linear time-varying systems[J].J Sound Vib,2004(279):1170-1180.
[7]AKYILMAZ O,KUTTERER H,SHUM C K,et al.Fuzzywavelet based prediction of Earth rotation parameters[J].Applied Soft Computing,2011(11):837-841.
[8]MALLAT S G.A theory for multiresolution signal decomposition:the wavelet representation[J].IEEE Trans PAMI,1989,11(7):674-693.
[9]張德豐.MATLAB小波分析[M].北京:機(jī)械工業(yè)出版社,2009:25-215.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
