一種新型磁電感應式轉矩傳感器的研制*
2014-08-29 11:47:42趙浩丁立軍馮浩吳曉陽嘉興學院南湖學院浙江嘉興3400杭州電子科技大學自動化學院杭州3008
傳感技術學報 2014年5期
關鍵詞:測量
趙浩,丁立軍,馮浩,2*,吳曉陽(.嘉興學院南湖學院,浙江嘉興3400;2.杭州電子科技大學自動化學院,杭州3008)
一種新型磁電感應式轉矩傳感器的研制*
趙浩1,丁立軍1,馮浩1,2*,吳曉陽1
(1.嘉興學院南湖學院,浙江嘉興314001;2.杭州電子科技大學自動化學院,杭州310018)
旋轉機械設備轉矩的準確測量對實現設備的狀態監測和故障診斷有重要的作用,為此,設計了一種基于電磁感應原理的新結構轉矩傳感器。方法是將負載轉矩產生的扭角信號轉化成傳感器勵磁繞組和輸出繞組的角位移,勵磁繞組建立脈振磁通,經過電磁耦合輸出繞組會產生與該角位移成正比的感生電動勢。推導了傳感器的輸出特性,構建了傳感器的數學模型,包括傳遞函數和狀態空間描述。分析了傳感器工作時的能控性和能觀性,根據李雅普諾夫穩定判據,證明了傳感器工作時的漸進穩定性。最后對傳感器進行了標定,實驗結果是傳感器的靈敏度約為2.8 mV/(N·m),最大重復性誤差約為1.24%,最大非線性誤差約為0.78%,最大遲滯誤差約為0.79%。
轉矩傳感器;電磁感應;數學模型;標定
轉矩是各種機械傳動軸的基本載荷形式,與動力機械的工作能力、能源消耗、效率、運轉壽命及安全性能等因素緊密聯系,轉矩的測量關系到傳動軸載荷的確定與控制、傳動系統工作零件的強度設計以及原動機容量的選擇等等。隨著電子計算機、生產自動化、現代信息、交通、冶金、能源、宇航等科學技術的發展和各行各業生產發展的需要,轉矩測量技術得到了人們的高度重視而成為測試領域發展較快的學科,在汽車、機器人、柴油機、石油、農業機械、船舶運輸、交通、冶金等多方面獲得了廣泛的應用[1-3]。
目前在轉矩測量中,傳遞類轉矩傳感器應用十分廣泛。傳遞類轉矩傳感器按轉矩信號的產生方式可分為光學式、光電式、磁電式、應變式、電容式等等,其中市場上較成熟的轉矩傳感器主要是磁電式和應變式。磁電式轉矩傳感器通過磁電感應獲取轉矩信號,德國HBM公司、日本小野測器和中國湘西儀表廠均有生產,傳感器輸出信號的本質是兩路具有相位差的角位移信號,需要對信號進行組合處理才能得到轉矩信息。它是非接觸式傳感器,無磨損、無摩擦,可用于長期測量,不足之處是體積大,不易安裝,不能測量靜止轉矩;應變式轉矩傳感器以電阻應變片為敏感元件,如德國HBM公司的T1,T2,T4系列轉矩傳感器、北京三晶集團的JN338系列傳感器等,它們在轉軸或與轉軸串接的彈性軸上安裝四片精密電阻應變片,并連接成惠思頓電橋,轉矩使軸的微小變形引起應變阻值發生變化,電橋輸出的信號與轉矩成比例。傳感器可以測量靜態和動態轉矩、高頻沖擊和振動信息,具有體積小重量輕等優點,不足之處是信號的傳輸易受干擾且損耗較大,導致測量精度不是很高。
近年來許多專家在轉矩測量方面進行了大量的研究,設計了多種新型轉矩或扭矩測量裝置,包括基于激光多普勒效應的扭矩傳感器[4]、環形球柵式扭矩傳感器[5]、環型空間陣列式扭矩傳感器[6]、基于螺管形差動變壓器的非接觸式扭矩傳感器[7]、測量超高速回轉軸扭矩的光柵式轉矩傳感器[8]、高速光電反射式轉速轉矩傳感器[9]、基于納米晶軟磁合金的非接觸中式轉矩傳感器[10]、基于空氣軸承支撐技術的扭矩標準機[11]和一種基于鐵基非晶態合金的非接觸半套環式新型扭矩傳感器[12]等等。
本文提出了一種基于電磁感應原理的新型轉矩傳感器,可以測量旋轉機械的靜態扭矩和動態轉矩,詳細闡述了傳感器的機械結構和測量原理。為了更加深入的揭示傳感器的特性,構建了傳感器的傳遞函數和狀態空間模型,并通過李雅普諾夫穩定判據驗證了整個傳感器系統是大范圍漸進穩定的。最后采用扭轉試驗機對傳感器進行了標定,得到了傳感器的各項性能指標。
1 傳感器機械結構
設計的電磁感應式轉矩傳感器剖面圖如圖1所示,主要部件包括傳感器軸、勵磁繞組、勵磁鐵心、輸出鐵心和輸出繞組,當測量旋轉系統轉矩時,需外接導電滑環,用于將勵磁電壓引入和輸出繞組電信號引出。
傳感器軸同心外設輸出鐵心,輸出鐵心一端與傳感器軸固定,另一端通過軸承與傳感器軸固定且可以相對傳感器軸轉動,輸出繞組置于輸出鐵心槽內。傳感器軸同心外設勵磁鐵心,勵磁鐵心一端與傳感器軸固定,另一端通過軸承與輸出鐵心固定且可以相對輸出鐵心轉動,勵磁繞組固定在勵磁鐵心上。勵磁繞組的軸線與輸出繞組的軸線垂直,勵磁繞組和輸出繞組同為單相繞組,兩相繞組的引出頭通過滑環與機殼的接線端連接。傳感器的實物圖如圖2所示,其中導電滑環部分可以直接購置。
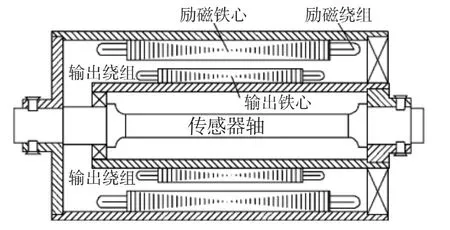
圖1 傳感器剖面圖

圖2 傳感器實物圖
2 傳感器工作原理
當一根彈性軸受到負載轉矩作用時,彈性軸兩端截面產生一個扭轉角Δθ,在彈性范圍內,扭轉角與負載轉矩存在如下關系式[13]:

式中Δθ為軸的扭轉角(rad);T為負載轉矩(N·m); L為軸的工作長度(m);D為軸的直徑(m);G為軸材料的剪切模量(N/m2)。
傳感器的勵磁繞組和輸出繞組的初始位置如圖3所示,兩相繞組的軸線互相垂直,其中勵磁繞組通入交變電流建立脈振磁場,無負載轉矩作用時,脈振磁場與輸出繞組沒有匝鏈,輸出繞組的感應電勢eo=0;當傳感器軸受到負載轉矩作用時,輸出繞組相對初始位置產生角位移Δθ,勵磁脈振磁場與輸出繞組匝鏈,輸出繞組的感應電勢eo≠0。
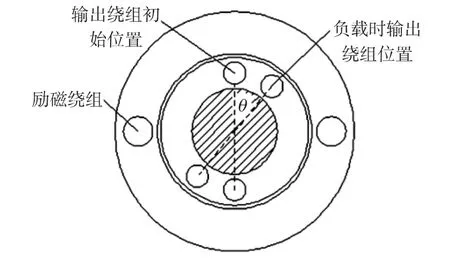
圖3 傳感器工作原理圖
根據磁路定理,勵磁繞組通交變電流i1=I1sin(ωt)時氣隙的瞬時磁通為:

式中W1為勵磁繞組有效匝數;I1為勵磁電流有效值;ω為勵磁電流角頻率;δ0為磁路氣隙的有效長度;μ0為空氣的磁導率;S0為磁路氣隙的有效面積; lfi為磁路中磁通經過勵磁鐵心的各段有效長度;μf為勵磁鐵心的磁導率;Sfi為磁路中磁通經過勵磁鐵心的各段有效面積;lti為磁路中磁通經過輸出鐵心的各段有效長度;μt為輸出鐵心的磁導率;Sti為磁路中磁通經過輸出鐵心的各段有效面積;氣隙的磁通密度為Bδ=φ/S0。
當輸出繞組相對初始位置產生角位移Δθ時,輸出繞組與磁通匝鏈的有效面積為S2,則與輸出繞組匝鏈的磁通量為φo=BδS2sinθ。輸出繞組的有效匝數為W2,根據電磁感應定理,輸出繞組產生的感應電勢為:
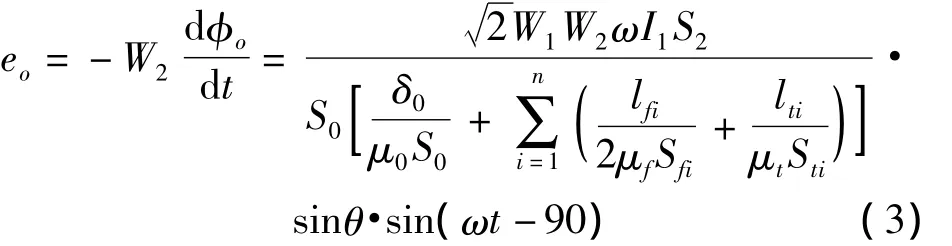
由式(1)和式(3)得輸出繞組感應電勢有效值為:
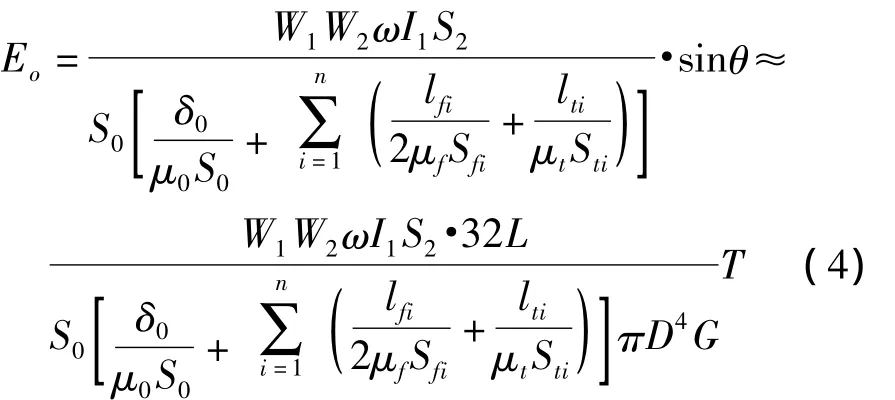
由此可知,輸出繞組感應電勢的有效值Eo和負載轉矩成正比關系,通過實驗標定得到其比例系數,就可以通過測量Eo得到負載轉矩T的大小。
3 數學模型
3.1 傳遞函數
勵磁繞組通交變勵磁電壓u1=U1sin(ωt),產生交變勵磁電流i1,勵磁繞組電感為L1,電阻為r,漏感為L1σ,勵磁回路電壓平衡方程為:

勵磁繞組磁場與輸出繞組匝鏈的磁通φ2= Ki1sinθ≈Ki1θ(K為與勵磁繞組磁化比例系數和輸出繞組有效面積相關的常數),則輸出繞組的感應電勢為:

傳感器工作時接負載Z,輸出繞組存在電阻R和漏感L2σ,輸出繞組電流為i2,輸出繞組電壓平衡方程為:

由式(3)可知,輸出感應電勢的相位落后勵磁電壓90°,所以負載Z(純阻性)兩端的輸出電壓為u2= i2Z=-U2cos(ωt)。對式(5)~式(7)進行拉氏變換并整理得傳感器傳遞函數為:

3.2 狀態空間模型及分析
選取適當的狀態變量,由系統的傳遞函數(8)可以得到系統狀態空間模型的對角型為:
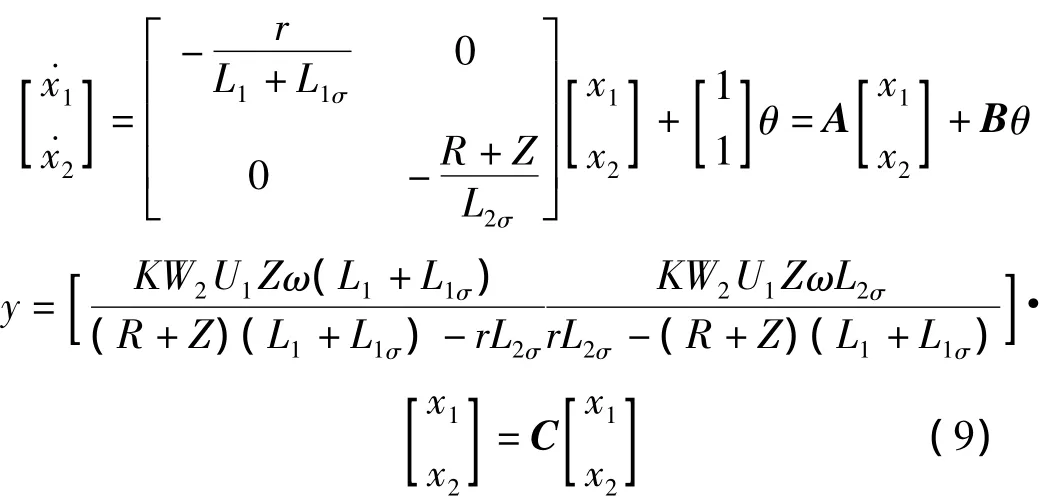
傳感器的狀態變量見圖4。
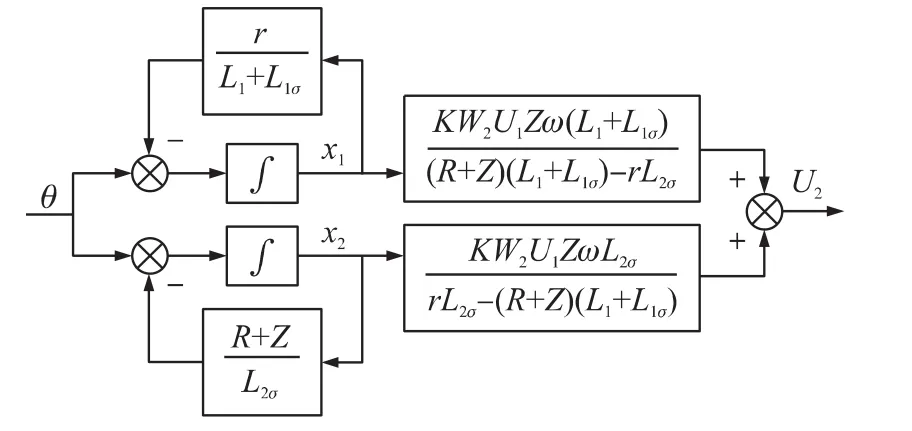
圖4 傳感器狀態變量圖
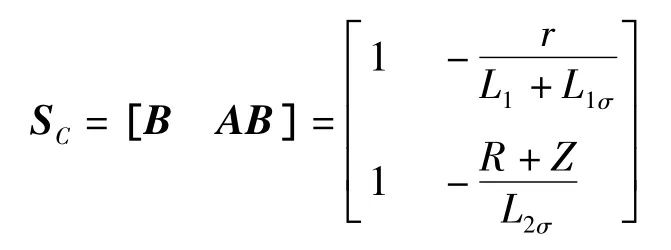
且由式(9)可知,傳感器的能控性判別矩陣為:由于rank SC=2,即由A、B構成的能控性判別矩陣SC滿秩,所以系統的狀態完全能控;傳感器的能觀性判別矩陣為:

rank SO=2,即由A、C構成的能觀性判別矩陣SO滿秩,所以系統的狀態完全能觀。
系統的穩定性分為外部穩定性和內部穩定性,外部穩定性是在零初始狀態下,外部輸入對系統響應的影響,可以根據系統閉環特征方程的根的情況的判斷。內部穩定性是只考慮系統自身初始狀態對系統的影響,也叫做李雅普諾夫意義下的漸進穩定。由式(8)可知,傳遞函數的2個極點都具有負實部,所以系統是外部穩定的。根據式(9)可以得到系統的狀態矩陣為:
引理線性系統內部穩定的充分必要條件是,給定一正定的實對稱陣Q(t),存在一個正定實對稱矩陣P(t),使得李雅普諾夫矩陣微分方程: AT(t)P(t)+˙P(t)+P(t)A(t)=-Q(t)成立。對于線性定常系統,A(t)=A,P(t)=P為常量矩陣,李雅普諾夫方程變為:ATP+PA=-Q=-I。

由于:p1>0且,,因此矩陣P正定,工作時的系統在李雅普諾夫意義下是大范圍漸進穩定的。
4 傳感器標定
采用NN-100A型扭轉試驗機對設計的傳感器進行標定,它有3種量程:200 N·m、500 N·m和1 000 N·m;相應的測量精度分別為0.4、1.0和2.0;適用于直徑D為10 mm~20 mm,長度L為100 mm~600 mm的試件。
本文設計的轉矩傳感器轉軸直徑為D=15 mm,長度L=200 mm,實驗開始前對傳感器軸承受的強度進行核算,軸所受的最大剪應力必須小于材料所允許的剪切強度極限,即,其中τ=(0.8~1)σ=(0.8~1),n為安全系數;σs為許用應力(N/mm2);σs為極限應力,即材料發生破壞時的應力(N/mm2)。一般情況下,靜載時安全系數ns=1.2~1.5,這里取ns=1.2,得到傳感器軸能夠承受的最大轉矩的計算公式為:傳感器軸彈性軸材料為40Cr,可查得σs=785 N/ mm2,由此得Tmax≈353 N·m,因此試驗機的量程選用500 N·m。傳感器所加交流勵磁電壓為7 V,頻率f =10 kHz,加載到300 N·m后開始卸載,得到如表1所示的實驗數據。得到傳感器的靈敏度約為2.8 mV/(N·m);最大非線性誤差約為0.78%;最大遲滯誤差約為0.79%;最大重復性誤差約為1.24%。
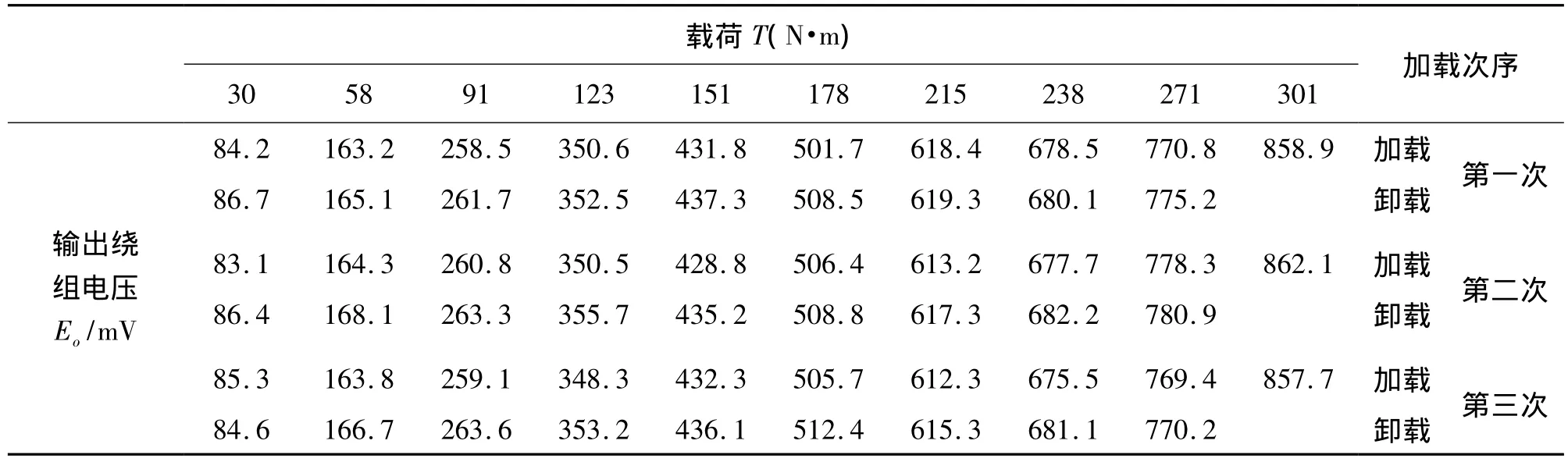
表1 傳感器標定實驗結果
5 結論
提出了一種電磁感應式轉矩傳感器,可以測量靜態扭矩和動態轉矩,其測量原理的正確性和系統的穩定性通過實驗和理論分析得到了驗證。對傳感器進行了標定,靈敏度約為2.8 mV/(N·m);最大非線性誤差約為0.78%;最大遲滯誤差約為0.79%;最大重復性誤差約為1.24%。后續工作的重點為:擬采用增加環形變壓器和補償繞組的方法,改善傳感器的輸出特性;擬開發基于Labview的信號處理裝置,使傳感器能夠進行實用化的推廣。
[1]郭闖強,倪風雷.具有力矩傳感器的柔性關節的振動抑制[J].機器人,2011,33(4):449-454.
[2]胡明江,王忠,祁利巧,等.轉矩傳感器在柴油機低溫阻力矩中的應用[J].儀表技術與傳感器,2009(1):9-11.
[3]吳強,廖勇.一種新型轉矩檢測技術及其在抽油機示功圖中的應用[J].電機與控制應,2010,37(3):55-60,65.
[4]劉彬,呂宏詩.一種激光多普勒扭矩傳感器的設計原理研究[J].傳感技術學報,2004(2):252-254.
[5]吳永烽,喻洪麟,何安國.環形球柵扭矩測量原理研究[J].儀器儀表學報,2010,31(11):2580-2585.
[6]喻洪麟,巴軍,何安國.環型空間陣列扭矩傳感器設計及電磁分析[J].儀器儀表學報,2009,30(8):1687-1691.
[7]余成波,張蓮,陳學軍,等.基于螺管形差動變壓器的非接觸式扭矩傳感器的研究[J].傳感技術學報,2006,19(3):713 -715.
[8]金遠強,胡麗國,楊樂民.超高速回轉軸轉矩測試原理與動態特性分析[J].導彈與航天運載技術,2007(2):39-42,61
[9]余以道,文澤軍,羅善明,等.高速光電反射式轉矩轉速傳感器及其試驗研究[J].儀器儀表學報,2009,30(3):610-614.
[10]石延平,范書華,臧勇.一種用于檢測轉角、轉速和轉矩的新型多功能非接觸式傳感器[J].傳感技術學報,2012,25(3): 378-382.
[11]張智敏,李濤,張躍,等.全自動高準確度100 N·m扭矩標準機[J].計量學報,2010,31(1):1-4.
[12]石延平,臧勇,周慶貴.基于鐵基非晶態合金的非接觸半套環式扭矩傳感器的研究[J].機械工程學報,2012,48(12):13-17.
[13]張有碩.轉矩測量技術[M].北京:計量出版社,1986.

趙浩(1983-),男,講師,主要研究方向為新結構傳感器的設計、電機振動特性分析及抑制方法研究。主持浙江省自然科學基金和浙江省教育廳科研項目等多項課題,在Sensors、VIBROENG J和傳感技術學報、計量學報等期刊上發表10多篇論文,zhaohao204@163.com;

丁立軍(1979-)男,講師,從事電氣自動化相關的教學科研工作。主要研究方向為信號檢測與處理,圖像工程。發表相關論文10多篇,多數被SCI和EI檢索,dljun2009@126.com;

馮浩(1956-),男,博士,教授,博士生導師,浙江寧波人,現為杭州電子科技大學紀委書記,一直從事電機與檢測、人工神經網絡技術與應用方面的研究和開發工作。曾主持國家自然科學基金、浙江省重大科技專項、留學回國人員基金、浙江省自然科學基金等課題多項;已發表論文60余篇,其中有多篇論文被SCI、EI收錄,zjhzfh@126.com。
Research on a Novel Electromagnetic Induction Torque Sensor*
ZHAO Hao1,DING Lijun1,FENG Hao1,2*,WU Xiaoyang1
(1.Nanhu Colleaege of Jiaxing University,Jiaxing Zhejiang 314001,China;2.Automation College of Hangzhou Dianzi University,Hangzhou 310018,China)
It is important to measure the rotating machinery torque accurately for its condition monitoring and fault diagnosis,therefore,a new structure torque sensor based on electromagnetic induction principle is designed in this paper.The method is to convert torsion angle produced by load torque into the angle displacement of sensor excitation windings and output windings,the excitation windings set up pulsating flux,then output windings produce induction potential which is proportional to the angular displacement through electromagnetic coupling.The output characteristic of sensor is deduced,and its mathematical models are constructed,including the transfer function and state space description.The controllability and observability of sensor are analyzed,and its asymptotic stability is proved according to Lyapunov stability criterion.The sensor is calibrated by torsion testing machine,the experimental results indicated the sensitivity of the sensor is2.8 mV/(N·m),the maximum repeatability error is 1.24%,the maximum non-linear error is 0.78%,the maximum hysteresis error is 0.79%.
torque sensor;electromagnetic induction;mathematical model;calibration
TP212
A
1004-1699(2014)05-0600-05
10.3969/j.issn.1004-1699.2014.05.006
項目來源:浙江省自然科學基金項目(LQ14E050007);浙江省教育廳科研項目(Y201330056);嘉興市科技計劃項目(2012AY1021);嘉興學院南湖學院科研重點課題項目(N41472001-4)
2014-02-19
2014-04-18
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00