導航接收機功率控制參數優化與性能分析
2014-08-21 09:46:48陳道偉唐小妹李柏渝王飛雪
全球定位系統 2014年5期
陳道偉,唐小妹,李柏渝,王飛雪
(國防科技大學電子科學與工程學院衛星導航定位技術工程研究中心,湖南 長沙 410073)
0 引 言
近年來隨著全球衛星導航定位技術的快速發展和普及,各種類型的便攜式導航信號接收設備得到了極大的推廣和應用。以衛星導航接收機為代表的導航終端產品,近年來得到了快速的發展和應用,其功能越來越強大,定位精度也越來越高。但是隨著功能的逐漸增多,接收機算法的日趨復雜和先進,能量消耗也越來越大,而相應的電池的電量卻并沒有得到顯著的提升。這對于接收機的可持續使用和低發熱量都存在很大的問題,功耗問題已成為接收機設計的一個關鍵問題。
當前國外相關導航芯片、模塊生產公司和研究機構,在低功耗控制技術方面擁有較為明顯的優勢,芯片功耗普遍在十幾毫瓦的級別,最低可低于10 mW.相比之下,國內導航芯片和模塊的生產機構,在低功耗設計方面還存在較大的差距,相關專利和技術相對較少,終端產品的功耗普遍在80 mW以上,嚴重制約了產品的競爭力。目前國內外對于導航接收機功耗控制技術的研究,主要可以劃分為兩類,一類是靜態功率控制技術[1],它主要通過對接收機內部模塊的合理調度和安排,達到降低功率消耗的目的,同時使接收機定位性能保持在較高水平。另一類則是動態功率控制技術[2],它的基本原理是在滿足需求的前提下,動態地調整接收機的工作頻率和電壓,以此來實現功率控制的目標。但是目前動態技術還未實現廣泛深入的應用[3]。
對于實際應用的靜態功率控制技術,目前尚未有文獻對其原理和性能優化進行研究和分析,本文從該角度入手對其功率控制原理和參數進行了建模和分析,在功耗最低和不影響性能的優化目標下,給出了功率控制的最優時間參數選擇,并且最后利用實驗驗證了該方法,并分析了功率控制對性能的基本影響情況。
1 接收機基本功率控制方式和原理
在導航接收終端低功耗研究設計方面,目前國外的CSR,U-blox等公司處于技術領先水平,不僅可以實現極低的功耗,而且還能保持較高的靈敏度。
1.1 CSR功率控制技術
CSR的前身為著名的SIRF公司,其前兩代產品功耗較高,不便于集成在便攜式終端載體上,從第三代導航產品SIRFstarIII芯片開始通過引入先進的功率控制模式[4]包括:自適應省電模式(ATP)、強制定位模式(PTF)、先進功率管理模式(APM),這些模式的應用使得定位芯片功耗得到大幅降低,可以直接集成在便攜式終端等載體上例如手機、pad等。
省電模式,是指接收機周期性地開啟進行定位解算,在獲得位置信息后,又關閉接收機的大部分模塊使接收機處于低功耗狀態,即接收機在不定位的時候,維持待機狀態,以此來節省功耗,具體過程如圖1所示。省電模式適用于那些信號強度較好且需要頻繁(周期1~10 s)更新定位結果的環境。而對于弱信號場景,在省電模式下接收機容易失鎖信號,為了保持接收機的定位的可用性提出了自適應省電模式,即接收機在信號強度較低時,轉入連續工作狀態,以此來保證對信號的持續跟蹤和定位解算。相比于接收機連續實時的跟蹤解算,省電模式節省了多余的跟蹤過程中所消耗的功率。
接收機在省電模式下需要保存前一次的定位結果,同時還需要對內部核心寄存器、RTC(實時時鐘)和RAM(隨機存儲器)保持1 mA左右的電流供應并對RTC時間進行告警編程,以便下次叫醒接收機重新工作。
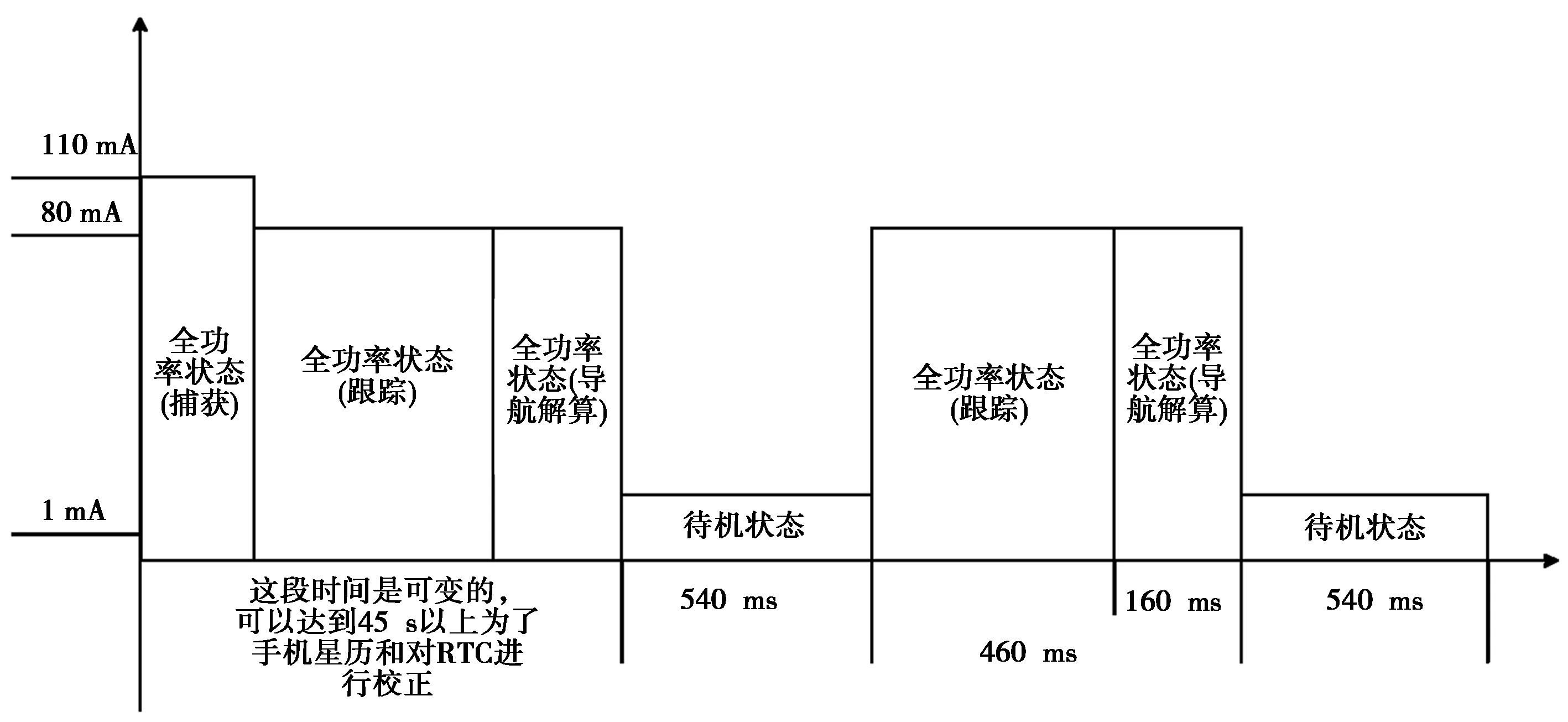
圖1 SIRF III 省電模式
強制定位模式,是指接收機以較長的時間間隔周期性地更新定位結果,更新周期一般為幾分鐘、幾十分鐘、甚至幾小時,適用于不需要頻繁更新定位結果的場景。在定位解算過程中,接收機更新位置、時間等信息并收集星歷數據,在獲得位置信息后則進入低功耗的待機狀態。在待機狀態下,當某個時刻用戶需要獲取位置時可快速恢復定位,即可強制進行定位解算。相比于連續定位模式和省電模式,強制定位模式下功耗可以得到大幅降低,基本流程如圖2所示。

圖2 SIRFIII 強制定位模式
先進功率管理模式,適用于移動無線設備位置獲取過程中的功耗控制,它給予了用戶更多的設置選項,允許用戶在服務質量(QoS)和定位時間間隔之間靈活選擇,服務質量主要為定位誤差和功耗節省比例。
SIRFstarIV芯片在SIRF III功率控制的基礎上增加了自適應微功耗控制器[5],集成了各種傳感器包括溫度傳感器、陀螺儀、磁力計等,可以始終保持熱啟動狀態,并能對溫度變化進行監視以及對運動狀態進行探測,可將接收機功耗維持在一個極低的水平。最新的SiRFatlasVITM則定義了深睡眠模式、休眠模式、待機模式、正常模式[6],其中深睡眠模式只對時鐘供電,休眠模式則對I/O(輸入/輸出)內存和時鐘供電,待機模式則開啟CPU和時鐘及I/O,正常模式則對所有器件完全供電。
1.2 U-blox功率控制方式
U-blox公司最新的導航芯片U-blox 7芯片定義了兩種功率控制模式:連續模式(Continuous Mode)和功率節省(PSM)模式[7]。
連續模式是連續的正常供電,當位置可以被計算并且有足夠的衛星數目被跟蹤時,關閉捕獲模塊以節省功耗,如果接收機不能再計算位置或者跟蹤的衛星信號小于4顆,則重新開啟捕獲模塊進行重捕獲。
功率節省模式通過選擇性轉換接收機部分模塊的開啟和關閉來減少系統功耗,分為循環跟蹤和開啟/關閉兩種操作,前者以較短的周期(1~10 s)更新定位結果,在兩次定位之間只用極低的功耗保持跟蹤模塊的開啟,有較高的跟蹤靈敏度;而后者則簡單地開啟和關閉大部分器件,使接收機處于低的或者是幾乎沒有系統活動的水平,功耗節省比例較高,適用于定位結果不頻繁更新的場景,周期可以為幾分鐘、幾小時甚至幾天。對于開啟/關閉操作,其流程圖如圖3所示。
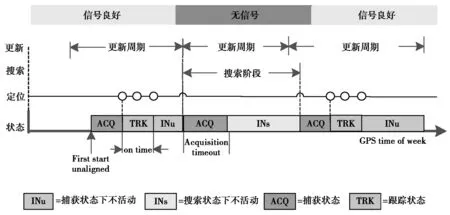
圖3 開啟/關閉下流程圖
而在循環跟蹤操作下,其流程圖如圖4所示:
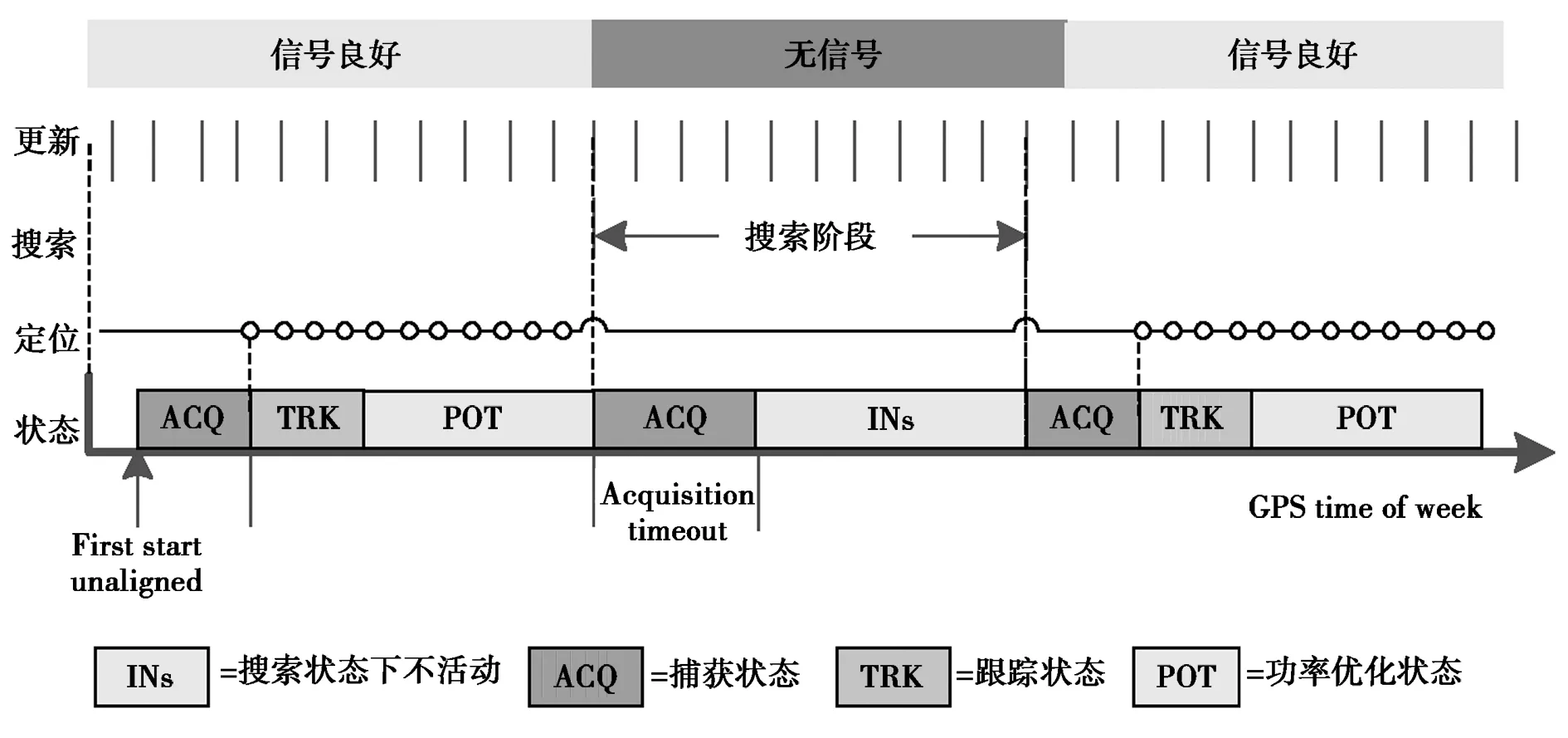
圖4 循環跟蹤下流程圖
從圖4可以看出,在信號質量好時,跟蹤狀態后的處理為功率優化跟蹤(POT),可以保持較低的跟蹤功耗,同時又不會丟失信號,這是循環跟蹤操作與開啟/關閉操作的主要區別。
1.3 功率控制性能模型
從上述U-blox和SIRF的功率控制技術來看,兩者技術原理大致相似都是通過周期性地開啟和關閉器件來節省功耗,可分為短周期和長周期的功率控制。
對于功率控制性能模型的評估和建立,可以從每個循環周期消耗的平均電流的大小來衡量,公式為
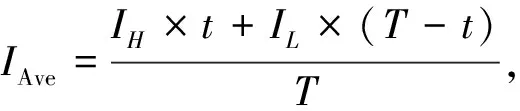
(1)
式中: 總的循環時間為T,對于省電模式T為1~10 s,強制定位模式為10 s~2 h; 每次定位解算的時間為t,T-t為待機時間;IH為定位解算過程中消耗的平均電流,包括跟蹤(Itrack)、導航解算(Inav)消耗的兩部分電流;而IL為待機狀態下消耗的電流。
(2)
從上式可以看出,功率節省的大小與時間參數的選擇有重要的關系,特別是在總的循環時間T一定的前提下,待機時間或者接收機不活動的時間T-t所占的比重越大,則功耗節省的比例越高,節省的能量越多。但是并不能無限壓縮定位解算時間t,因為其會對接收機的正常工作和性能造成影響。
2 功率控制參數與性能分析優化
從以上分析可知,尋找最優的時間參數是接收機進行功率控制的關鍵。下面以CSR的功率控制技術為基礎,分析最優的時間參數的選擇與設置。
2.1 時間控制參數優化
對于SIRF功率控制技術,其主要的時間參數包括待機時間(Trickle time)、跟蹤時間(Tracking time)、定位解算時間(Navigating time),在每一個循環周期內重復進行上述三個過程。在省電模式下其循環周期為1~10 s之間,為了便于分析以接收機典型的1 s/次的定位周期為例進行分析,具體參考圖1。
時間參數優化的準則是在不影響接收機正常工作和性能的前提下,最大化地降低接收機的功率消耗,即要使上式(1)的平均電流最小。而對于待機時間、跟蹤時間和定位解算時間,在總的循環時間固定的前提下,就是要尋找最大的待機時間,使其滿足上述優化準則。
對于定位解算時間,由于最小二乘算法計算量固定,在處理器工作頻率一定的情況下,定位解算所花費的時間一般是一個固定值,如圖1中的160 ms,要想進一步壓縮定位解算時間需要進行算法計算量優化或者采用簡化算法。因此尋找最大的待機時間的問題,即可以轉化為尋找最小的環路跟蹤時間。
對于最優環路跟蹤時間的約束是,接收機在重新開啟跟蹤后,能夠在該時間內迅速收斂到穩定的狀態,此時輸出的測量值才是穩定可靠的,否則將造成較大的誤差。而接收機能夠收斂的前提條件是,輸入的載噪比滿足最低的跟蹤靈敏度,并且動態應力和測量誤差不會使環路失鎖。
因此根據優化參數、目標公式和約束條件,對最優的跟蹤時間優化問題可用下面模型描述
(3)
式中:CNR0為跟蹤靈敏度門限值,載噪比CNR應大于此門限值;v為接收機動態應力;σPLL為環路相位測量誤差均方差,輸入的動態應力和測量噪聲應使其滿足小于150的門限值;G為目標函數;t為需要求解的最優時間參數。
求解t的目標函數G并沒有完整的解析公式,其主要由兩部分約束構成,一部分是前述的公式(1),另一部分則是環路要能收斂到穩態。而環路跟蹤收斂的時間長短與環路的暫態響應有重要關系,在待機狀態后接收機可能會經歷相位階躍、頻率階躍等動態變化,最優跟蹤時間t應滿足在遇到上述動態變化仍能重新跟蹤收斂。下面從鎖相環暫態響應的角度分析環路在外界激勵下趨于穩態所需花費的時間,設定條件為輸入載噪比為50 dB-Hz, 動態性為低速靜止,環路能夠實現正常的穩定跟蹤。
對于接收機典型常用二階鎖相環路,其系統函數H(s)為[8]
(4)
式中,ξ和wn分別為阻尼系數與特征頻率,考慮到接收機的待機時間較短,主要經歷的動態應力為相位階躍和頻率階躍激勵。對二階鎖相環進行相位階躍激勵下的暫態響應分析,可得如圖5所示結果。

圖5 二階鎖相環在相位階躍激勵下的暫態響應
從圖5中可知,當wnt大于6時相位跟蹤誤差開始收斂進入穩定狀態,由二階鎖相環最優參數設置BL=0.53wn可知,當噪聲帶寬BL為典型的15 Hz時,那么相應的特征頻率wn=28.301 9,此時至少需要時間t=(6×0.55)/BL=212 ms才能進入穩定的收斂狀態。同理當噪聲帶寬BL為10 Hz時,則至少需要時間t=318 ms才能進入收斂狀態。接收機噪聲帶寬BL的選擇需要兼顧動態性和噪聲濾除一般在10 Hz以上,因此對于相位階躍激勵下二階鎖相環的收斂時間至少需要300 ms以上。
對于頻率階躍激勵下的二階鎖相環暫態響應,如圖6所示。從圖中可以看出當wn=5時幅度最大,此時在時間t=250 ms后頻率跟蹤誤差開始進入穩定收斂狀態,當wn=10時大約從跟蹤時間t=120 ms后開始進入收斂狀態。由于BL不會小于5 Hz,因此其wn至少大于9.434 0(5/0.53=9.434 0),對于頻率階躍激勵的收斂時間要求至少需要120 ms以上。
綜上所述,對于省電模式下的接收機,其從待機狀態進入定位解算過程中,載波環跟蹤的時間至少需要下式所求得的時間長度才能收斂。
t=(6×0.53)/BL.
(5)
考慮到動態性BL一般在10 Hz以上,因此,至少需要300 ms以上的時間才能進入穩定狀態。
對于省電模式下循環更新周期,其功率控制最優的時間參數選擇如表1所示,對于2 s或者2 s以上的循環周期,可適當延長跟蹤時間以適應動態應力的變化,以此可達到最優的功耗節省。
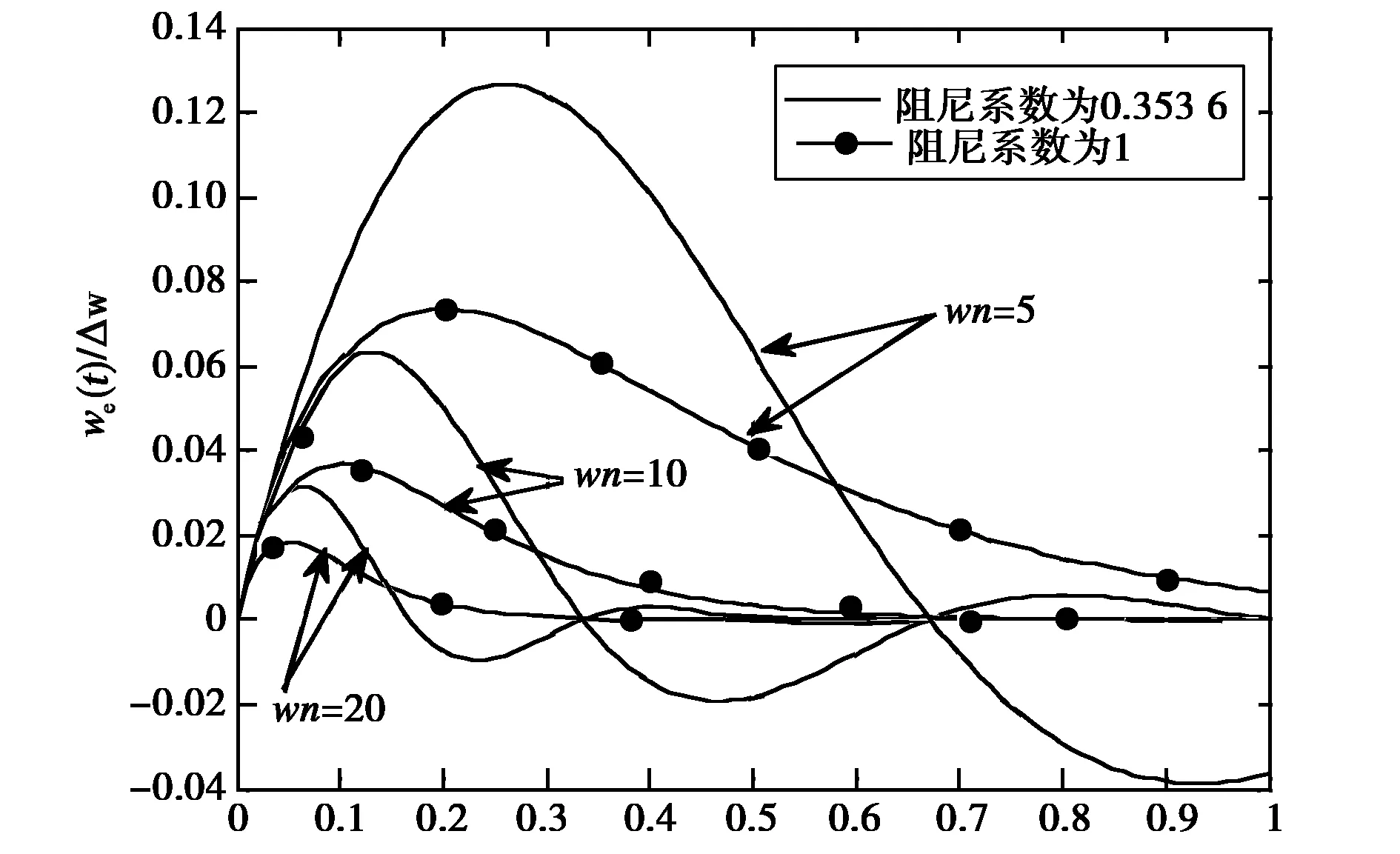
圖6 二階鎖相環對頻率階躍的響應
表1最優時間參數選取
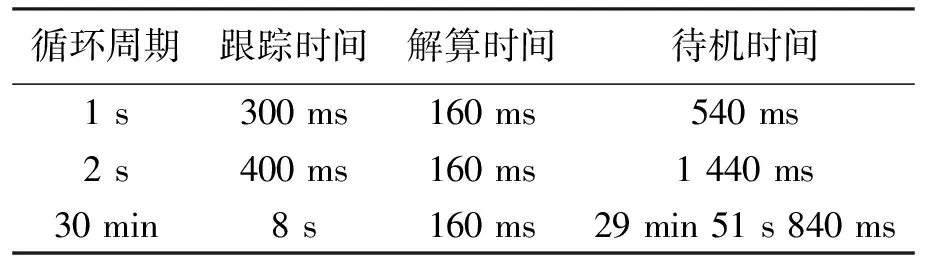
循環周期跟蹤時間解算時間待機時間 1 s300 ms160 ms540 ms 2 s400 ms160 ms1 440 ms 30 min8 s160 ms29 min 51 s 840 ms
對于長周期下的強制定位模式,由于定位結果更新的時間間隔較長(10 s~2 h),此時接收機經歷的動態性、衛星的星座變化及不可以預知的因素較多,因此接收機從待機狀態重新進入跟蹤和解算階段時,接收機需要重新進行捕獲跟蹤信號即需要進行熱啟動,例如圖2中其更新周期為30 min而從待機狀態重新進行跟蹤的時間為8 s.因此其跟蹤的最短時間即為熱啟動的時間。
根據以上分析結果,可對不同的種類和參數的接收機選擇設計適合自身的合理的功率控制時間參數。
2.2 功率控制對性能的影響分析
功率控制雖然降低了功耗,但顯然會對接收機性能產生影響,主要影響的性能包括:定位時間和定位精度。
2.2.1 對定位時間的影響
對于省電模式下的功率控制,由于其在待機的這段時間內因接收機沒有連續跟蹤信號,載波和偽碼的頻率、相位狀態可能會由于動態應力的影響而產生變化,在下一次重新開啟環路后,接收機需要花費額外的時間進行重新跟蹤。相比于連續實時跟蹤的情況,延長了極小量的定位時間。但如果經歷較大的動態應力或者信號在極短的時間內衰落,則會對重新定位時間有較大的影響,甚至丟失信號不能進行定位。
對于強制定位模式下的功率控制,其定位結果更新周期為10 s~2 h,待機時間較長。在環路關閉的這段時間內,接收機和衛星的相對位置可能會發生較大的變化,衛星的可見性和信號的質量也有可能發生改變,甚至衛星的星歷參數都可能進行了更新,因此當接收機重新開啟進行位置更新時,定位時間相比實時跟蹤將會大大延長,由于未知因素較多,接收機相當于進行熱啟動。但相對應的是,由于接收機待機的時間較長,節省的功耗比例也相應的越大。綜上所述,功率控制降低了接收機的功率消耗,但同時也會對定位時間產生一定程度的影響。
2.2.2 對定位精度的影響
接收機定位精度主要與測量誤差和衛星的幾何分布有關,對于功率控制而言,其對衛星的幾何分布影響較小,因此功率控制主要影響的是接收機的測量誤差。而測量誤差的大小與信號的強度有緊密的關系,當信號載噪比降低時,測量誤差增大,此時接收機的定位精度將下降。
對于省電模式,其環路關閉的時間較短,在短時間內,信號強度的變化將不會是很劇烈的,因此當下次接收機重新開啟進行跟蹤定位時,由于沒有連續跟蹤,其靈敏度將下降,而定位精度也將會有輕微的損失。而對于強制定位模式,由于環路關閉的時間較長,環境因素變化較大,信號質量有可能遇到較大的變化,特別是當從室外進入室內等惡劣環境時,不僅定位精度也會下降,而且還可能出現無法定位的情況。
3 實驗分析
為了更加清晰直觀地顯示功率控制對定位性能的影響情況,利用基于泰斗TD3020C的導航接收機和模擬信號源,在實驗室環境下模擬生成導航信號并利用接收機進行接收,測試功率控制對接收機定位性能的基本影響情況。
3.1 測試定位時間與功率控制的關系
針對省電模式下的功率控制,調整Trickle 的時間范圍,針對GPS的L1信號重復測試多組數據,得出定位時間與待機時間的關系,結果如圖7、8所示。
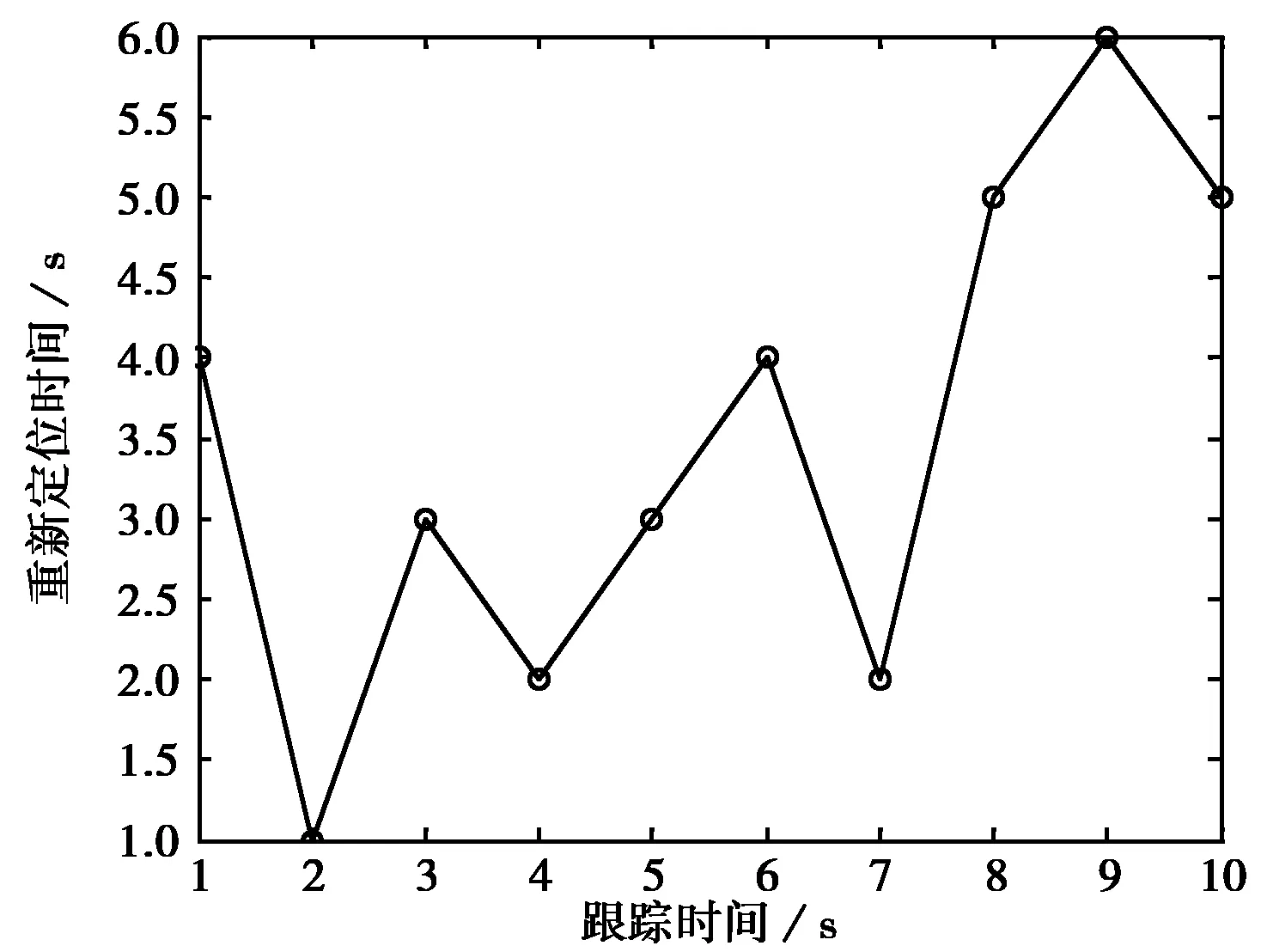
圖7 短周期待機時間與定位時間的關系
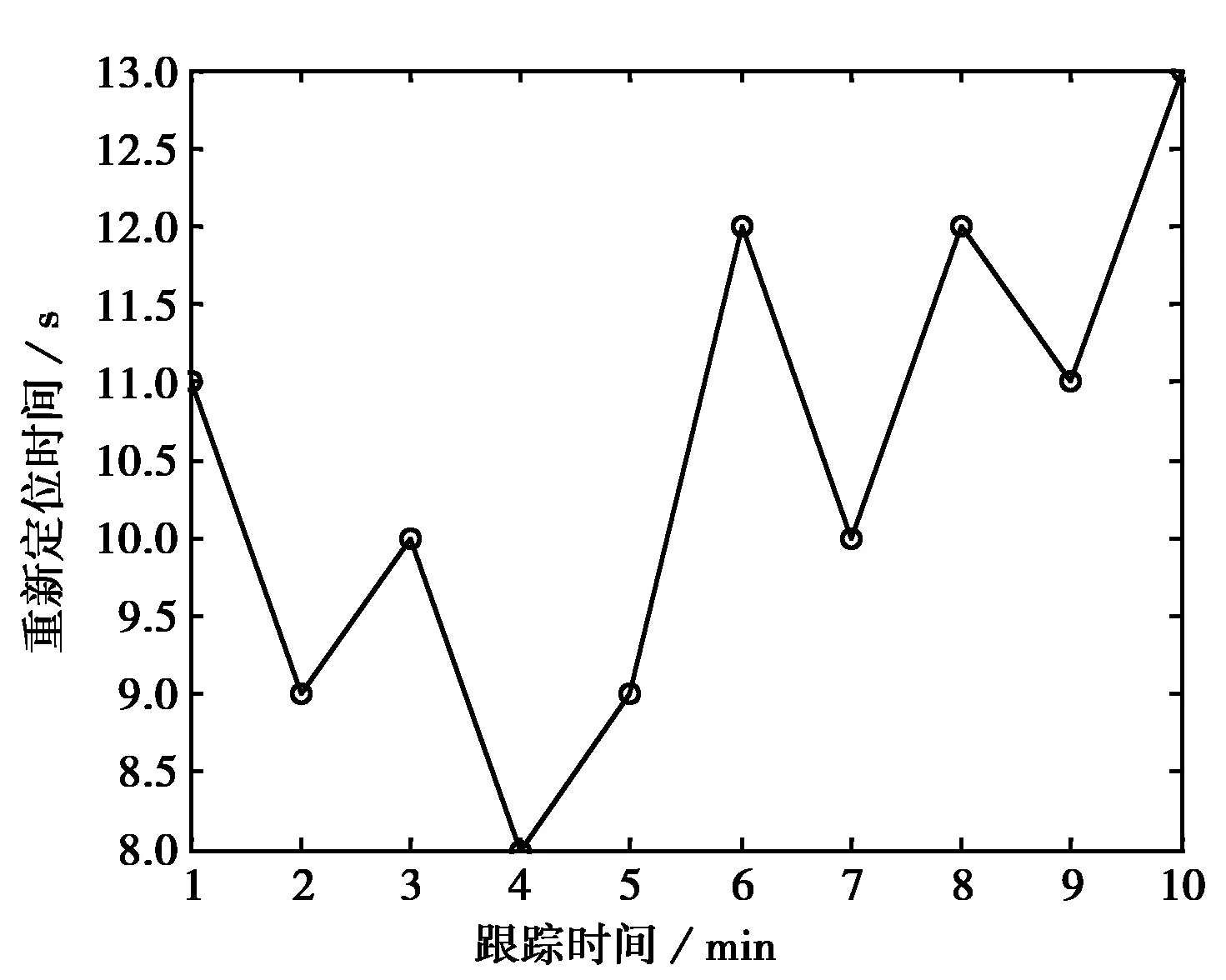
圖8 長周期待機時間與定位時間的關系
從圖中可以看出,對于短周期和長周期下的待機時間越長,則重新定位所花費的時間也越長,而待機的時間越長節省的功耗也就越多,因此節省的功耗越多,相應地要犧牲重新定位時間。
3.2 測試定位精度與功率控制的關系
同理,調整Trickle 的時間范圍,得出定位精度與功耗控制的關系,結果如圖9、10所示。
從圖9、10中可以看出,待機的時間越長,定位精度將會有所下降。這說明功率控制雖然節省了功耗,但是相應地降低了接收機對信號的實時跟蹤處理能力,導致定位精度下降。
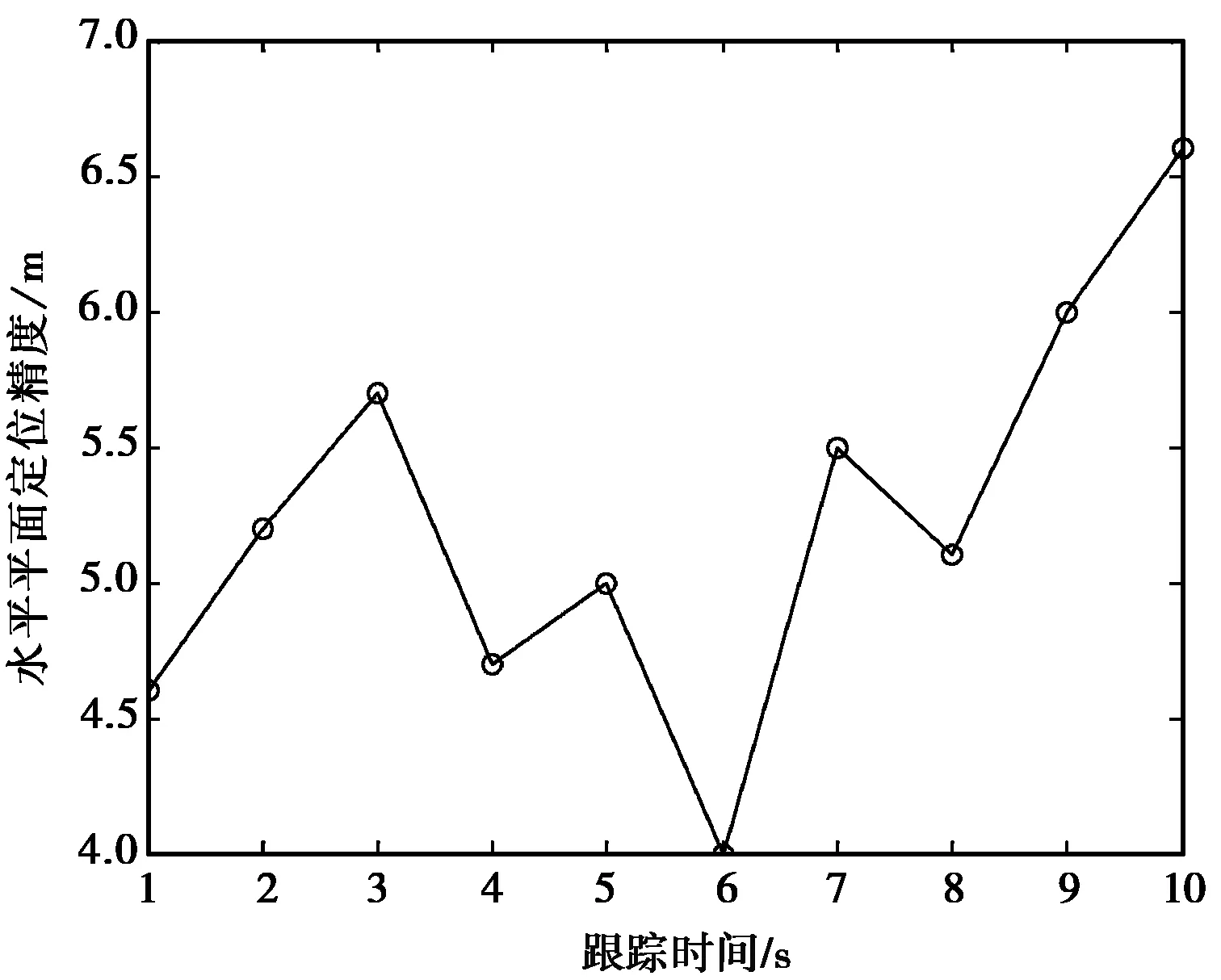
圖9 短周期下功率控制與定位精度的關系
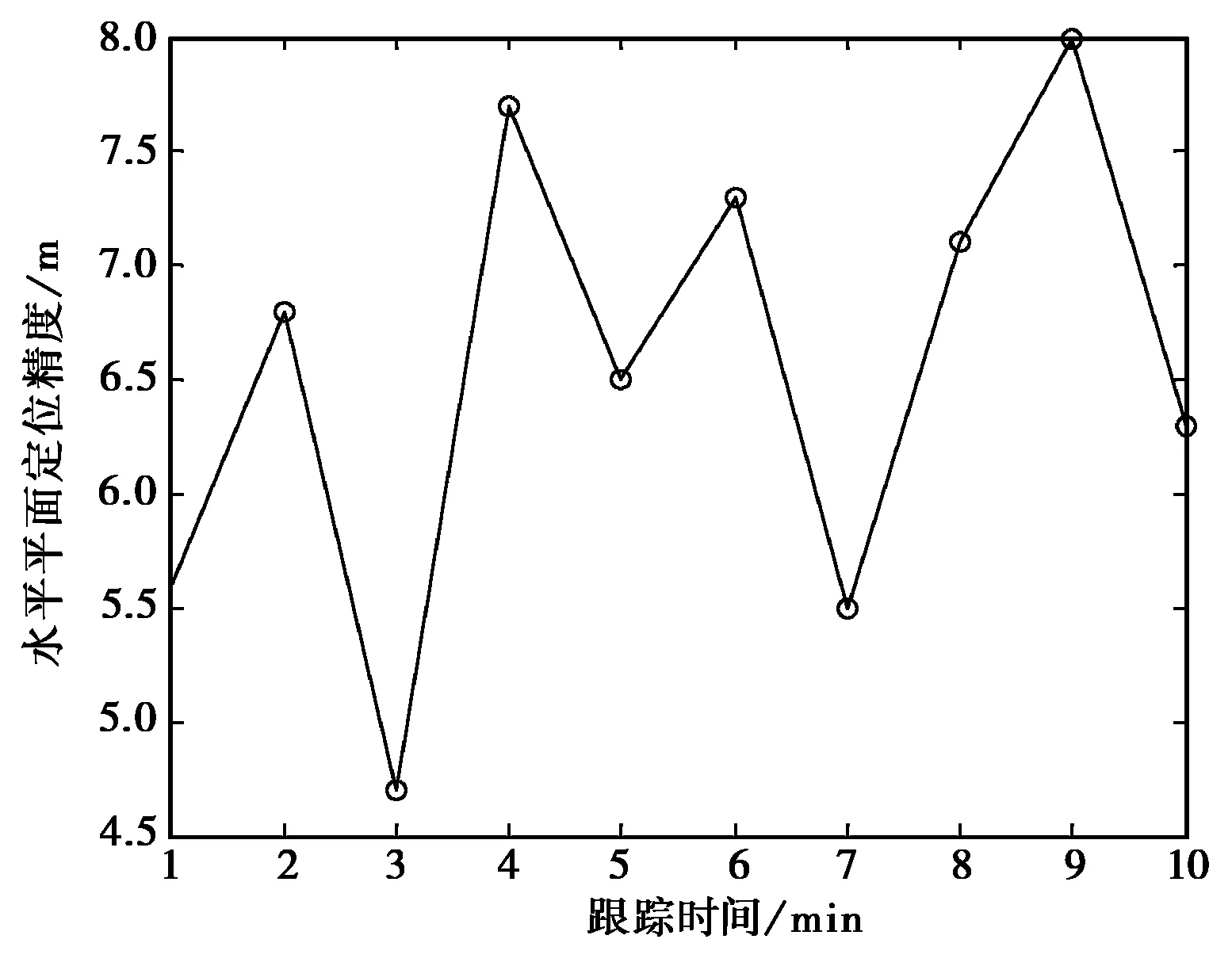
圖10 長周期下功率控制與定位精度的關系
4 結束語
本文分析了導航接收機功率控制的時間參數的最優選取,得出了基本的結論是跟蹤時間的最小長度為300 ms,同時從定位時間和定位精度兩個方面分析了功率控制對接收機性能的影響。得出的基本結論是,功率節省的比例和性能之間是矛盾的,必須要折中最優選取。
[1]盧春鵬.動態電壓和頻率調節在降低功耗中的作用[J].單片機與嵌入式系統應用,2007(5):12-17.
[2]王 彪,王小鴿.動態電壓和頻率調整綜述 [J].計算機應用研究,2009,35(13):160-162.
[3]CASTAGNETTI A, BELLEUDY C, BILAVARN S,etal. Power consumption modeling for DVFS exploitation. [C]//13th Euromicro Conference on Digital System Design: Architectures, Methods and Tools, 2010:579-586.
[4]LEE Y, ABTAHI R. SiRF application note power management considerations of SiRFstarIIIs [EB/OL].http://www.csr.com/products/26/sirfstariii-gsd3tw.
[5]GOPINATH S, HUNTINGFORD D, MCCARTHY T,etal.The SiRFstarIV advantage[M].Sirf,2009:9-11.
[6]CSR.SiRFatlasVI application processor advance information CSRS366-IBBO-R issue 1[EB/OL]. http://www.csr.com.
[7]U-BLOX. U-blox-7 receiver description including protocol specification V14[EB/OL]http://www.u-blox.com/zh/u-blox-7-technology.html.
[8]謝 鋼.GPS原理與接收機設計[M].北京: 電子工業出版社, 2009:2-6.
