基于DSP和FPGA的全數(shù)字永磁同步電機(jī)伺服系統(tǒng)的設(shè)計(jì)*
2014-08-08 02:28:10紀(jì)艷華錢佳利
電機(jī)與控制應(yīng)用 2014年3期
關(guān)鍵詞:信號(hào)
紀(jì)艷華, 錢佳利
(1. 上海開放大學(xué),上海 200433; 2. 通用電氣公司,上海 201100)
0 引 言
永磁同步電動(dòng)機(jī)具有結(jié)構(gòu)簡(jiǎn)單、體積小、效率高、轉(zhuǎn)矩電流比高、轉(zhuǎn)動(dòng)慣量低、易于散熱及維護(hù)保養(yǎng)等優(yōu)點(diǎn),在印刷設(shè)備、紡織設(shè)備、航空航天、數(shù)控機(jī)床、加工中心、機(jī)器人等場(chǎng)合獲得廣泛應(yīng)用。隨著永磁材料價(jià)格的下降、材料磁性能的提高,及新型永磁材料的出現(xiàn),在中小功率、高精度、高可靠性、寬調(diào)速范圍的伺服系統(tǒng)中,永磁同步電動(dòng)機(jī)的應(yīng)用領(lǐng)域逐步得到推廣。
要獲得高性能的永磁同步電機(jī)伺服驅(qū)動(dòng),就要有性能優(yōu)良的控制系統(tǒng)。本文介紹了一種基于矢量控制算法(Space Vector Pulse Width Modulation, SVPWM)的全數(shù)字永磁同步伺服系統(tǒng),其以DSP作為核心控制器,為了獲得更高的控制精度和更快的響應(yīng)速度,還將FPGA作為輔助控制器。DSP選用TI公司的TMS320LF2407A,F(xiàn)PGA選用Altera公司的Cyclone Ⅱ系列FPGA(EP1C3T144C8)。DSP和FPGA的應(yīng)用,不僅可簡(jiǎn)化系統(tǒng)結(jié)構(gòu),使系統(tǒng)獲得高精度和高可靠性,還為新型控制理論和方法的應(yīng)用提供了基礎(chǔ)。
1 全數(shù)字永磁同步伺服系統(tǒng)的結(jié)構(gòu)與組成
永磁同步伺服系統(tǒng)是一種典型的位置、速度和電流三環(huán)調(diào)節(jié)系統(tǒng),其基本框圖如圖1所示。從系統(tǒng)的控制結(jié)構(gòu)來(lái)看,伺服的位置閉環(huán)系統(tǒng)可看作是位置調(diào)節(jié)為外環(huán)、速度調(diào)節(jié)為內(nèi)環(huán)的雙閉環(huán)自動(dòng)控制系統(tǒng),其內(nèi)部的實(shí)際工作過(guò)程是把位置輸入轉(zhuǎn)換成相應(yīng)的速度給定信號(hào),再通過(guò)調(diào)速系統(tǒng)驅(qū)動(dòng)伺服電機(jī),實(shí)現(xiàn)實(shí)際位移。
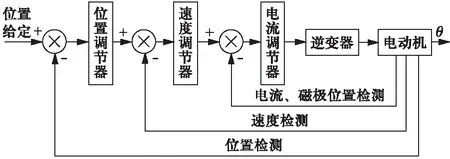
圖1 永磁同步電機(jī)伺服系統(tǒng)基本框圖
本設(shè)計(jì)中采用的全數(shù)字伺服系統(tǒng)結(jié)構(gòu)框圖如圖2所示。
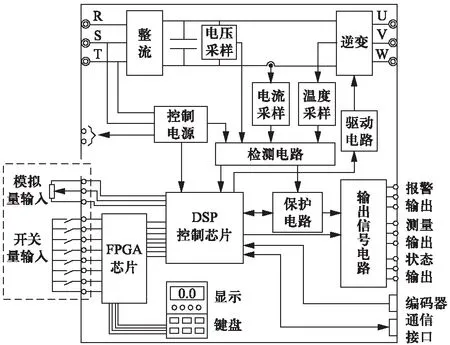
圖2 全數(shù)字伺服系統(tǒng)結(jié)構(gòu)框圖
主回路采用交-直-交電壓型逆變器形式。不可控整流由功率二極管模塊承擔(dān),不可控整流橋和主濾波電容器完成從恒頻恒壓交流電源到直流電源的變換。逆變器選用三菱公司生產(chǎn)的智能功率模塊,實(shí)現(xiàn)從直流電到變頻變壓交流電的轉(zhuǎn)換,為伺服電動(dòng)機(jī)的定子繞組提供所需的交流電。
控制回路以DSP為核心控制器,F(xiàn)PGA作為輔助控制器,還包含外圍接口電路、電流反饋的處理電路、光電脈沖編碼器信號(hào)的處理電路、PWM驅(qū)動(dòng)信號(hào)隔離電路、故障處理和保護(hù)電路及與上位計(jì)算機(jī)的串行通信等電路。DSP采用TI公司的運(yùn)動(dòng)控制專用芯片TMS320LF2407A,構(gòu)成伺服系統(tǒng)控制器的核心控制單元,其主要完成模擬指令的接收轉(zhuǎn)換,電機(jī)定子電流的AD采樣,電機(jī)角度、轉(zhuǎn)速及位置的計(jì)算,復(fù)雜控制算法的實(shí)現(xiàn),PWM驅(qū)動(dòng)信號(hào)的產(chǎn)生,故障信號(hào)的檢測(cè)與系統(tǒng)故障的處理,外部控制信號(hào)的接收,及與串行外設(shè)和顯示電路的通信控制等。FPGA采用Altera公司的Cyclone Ⅱ系列FPGA(EP1C3T144C8)實(shí)現(xiàn)控制器擴(kuò)展單元的管理功能,主要完成鍵盤輸入信號(hào)的電平轉(zhuǎn)換和輸入輸出I/O的處理、位置指令脈沖的處理、故障信號(hào)的綜合及控制信號(hào)的邏輯處理等。系統(tǒng)采用兩路霍爾電流傳感器檢測(cè)伺服電動(dòng)機(jī)相電流的瞬時(shí)值,采用光電脈沖編碼器檢測(cè)伺服電動(dòng)機(jī)的旋轉(zhuǎn)角位移及磁場(chǎng)位置。
2 系統(tǒng)的軟件實(shí)現(xiàn)
2.1 PMSM的矢量控制
矢量控制通過(guò)電機(jī)磁場(chǎng)定向?qū)⒍ㄗ与娏鞣譃閯?lì)磁分量和轉(zhuǎn)矩分量,分別加以控制,從而獲得良好的解耦特性。對(duì)于永磁同步電機(jī),矢量變換的實(shí)質(zhì)是對(duì)電機(jī)定子電流空間矢量幅值和相位進(jìn)行控制,最終可歸結(jié)為對(duì)d軸和q軸電流的控制。
在永磁同步電機(jī)矢量控制中,電機(jī)轉(zhuǎn)矩給定即為iq,與轉(zhuǎn)矩和轉(zhuǎn)子磁鏈ψf成正比。只要能很好地控制定子勵(lì)磁電流id,保持轉(zhuǎn)子磁鏈ψf幅值恒定,則轉(zhuǎn)矩只受定子電流的轉(zhuǎn)矩分量iq控制。通過(guò)永磁同步電動(dòng)機(jī)的矢量控制,就能獲得與直流電動(dòng)機(jī)調(diào)壓調(diào)速相同的性能。
基于永磁同步電機(jī)dq坐標(biāo)系統(tǒng)的數(shù)學(xué)模型,電機(jī)的矢量控制方法主要有:id=0控制、cosφ=1控制、恒磁鏈控制、力矩電流比最大控制。
在id=0控制條件下,電磁轉(zhuǎn)矩僅與定子電流的交軸分量iq有關(guān),對(duì)于表面式轉(zhuǎn)子結(jié)構(gòu)的永磁同步電機(jī),此時(shí)單位定子電流可獲得最大轉(zhuǎn)矩,從而使電機(jī)銅損耗下降,效率提高,電機(jī)調(diào)速更易實(shí)現(xiàn)。故本文設(shè)計(jì)的系統(tǒng)采用id=0控制。
采用id=0的線性化解耦控制,電機(jī)定子電流只有橫軸分量,電機(jī)轉(zhuǎn)矩只有基本轉(zhuǎn)矩分量,這與直流電動(dòng)機(jī)的控制原理變得一樣,只要能夠檢測(cè)出轉(zhuǎn)子位置,使三相定子電流的合成電流矢量位于q軸上即可。
2.2 系統(tǒng)整體軟件設(shè)計(jì)
整個(gè)伺服電機(jī)驅(qū)動(dòng)器由串行SCI接口作為指令輸入。通過(guò)模式選擇程序,可選擇位置控制模式或速度控制模式。其中位置控制模式由SCI輸入指令位置來(lái)完成,當(dāng)電機(jī)定位完成以后,驅(qū)動(dòng)器就會(huì)通過(guò)SCI返回定位完成信息。速度控制模式有兩種形式選擇: 一種是通過(guò)SCI通信輸入速度信號(hào),另一種由外部模擬電壓作為速度控制信號(hào)。
位置控制信號(hào)首先輸入位置環(huán),位置環(huán)輸出速度信號(hào),速度環(huán)對(duì)輸入速度信號(hào)進(jìn)行PI調(diào)節(jié),輸出q軸參考電流,d軸參考電流始終保持為0,然后再分別對(duì)兩電流作PI調(diào)節(jié),得到兩相運(yùn)動(dòng)的電流信號(hào)。通過(guò)逆PARK變換,變換成兩相靜止的電流信號(hào),靜止的電流信號(hào)通過(guò)SVPWM模塊產(chǎn)生六路PWM信號(hào)控制功率逆變器驅(qū)動(dòng)電機(jī)。
安裝在U相和V相的電流傳感器負(fù)責(zé)檢測(cè)U相和V相的電流,得到Iu和Iv,通過(guò)CLARKE變換為靜止的兩相電流,再通過(guò)PARK變換把靜止的兩相電流轉(zhuǎn)換成運(yùn)動(dòng)的兩相反饋電流,分別送到電流環(huán)里進(jìn)行運(yùn)算。
安裝在電機(jī)尾部的光電碼盤將測(cè)量到的速度作為速度環(huán)的反饋速度,同時(shí)提供PARK變換和PARK逆變換所需的電角度。通過(guò)計(jì)算得出電機(jī)所轉(zhuǎn)過(guò)的位置,反饋給位置環(huán)進(jìn)行運(yùn)算。
2.3 利用TMS320F2407實(shí)現(xiàn)SVPWM算法
TMS320F2407的事件管理器具有產(chǎn)生對(duì)稱空間矢量PWM波形的內(nèi)置硬件電路。為了輸出空間矢量PWM波形,需要設(shè)置以下相關(guān)寄存器:
(1) 設(shè)置ACTRx寄存器的比較輸出引腳的輸出方式;
(2) 設(shè)置COMCONx寄存器的使能比較操作和空間矢量PWM模式,并且把CMPRx的重載入條件設(shè)置下溢;
(3) 將通用定時(shí)器1或2,4或5設(shè)置成連續(xù)增/減計(jì)數(shù)模式,并起動(dòng)定時(shí)器;
然后,將輸入到電機(jī)的電壓Uo分解為αβ坐標(biāo)系下的Uα和Uβ,以確定每個(gè)PWM周期的相關(guān)參數(shù),具體步驟如下:
(1) 確定兩個(gè)相鄰矢量Ux和Ux+60(通過(guò)確定Uo所在的扇區(qū)數(shù)即可達(dá)到此要求);
(2) 根據(jù)SVPWM的調(diào)制周期T,計(jì)算兩個(gè)基本的空間矢量和0矢量分別的作用時(shí)間T1、T2和T0;
(3) 將相應(yīng)于Ux的開啟方式寫入到ACTRX的14~12位中,并將1寫入ACTRX第15位中;
(4) 將T1/2的值寫入到CMPR1或CMPR4寄存器,將(T1+T2)/2的值寫入到CMPR2或CMPR5寄存器;
在空間矢量PWM模式中,當(dāng)兩個(gè)比較寄存器CMPR1和CMPR2裝入的值都是0時(shí),3個(gè)比較輸出全都變成無(wú)效,故在使用空間矢量PWM時(shí)應(yīng)滿足如下關(guān)系式:
CMPR1≤CMPR2≤T1PR或CMPR4≤CMPR5≤T3PR
生成的空間矢量PWM波形關(guān)于每個(gè)PWM周期中心對(duì)稱,故該方法被稱為對(duì)稱空間矢量PWM生成法。該空間矢量PWM波形如圖3所示。
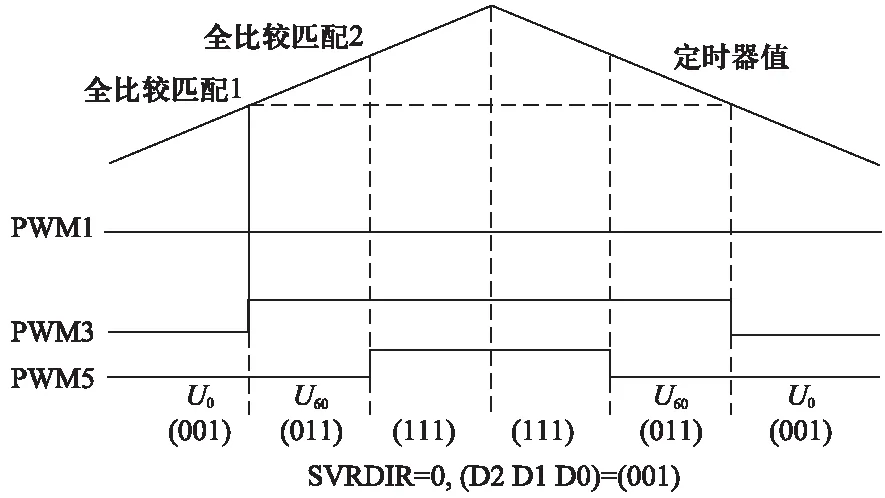
圖3 空間矢量PWM波形
3 試驗(yàn)與結(jié)果分析
本文的控制對(duì)象是一臺(tái)面裝式永磁同步電動(dòng)機(jī),型號(hào)為M90-8F02430LF。其額定功率750W,額定電壓220V,額定電流3A,額定轉(zhuǎn)速3000r/min,額定力矩2.4N·m,轉(zhuǎn)子慣量2.45×10-4,機(jī)械時(shí)間常數(shù)4.65ms,繞組電阻3.2Ω,繞組電感7.0mH。系統(tǒng)的調(diào)速范圍是1~2000,調(diào)速比是2000。
(1) 電機(jī)帶固定小負(fù)載情況下的轉(zhuǎn)速跟蹤波形如圖4所示。
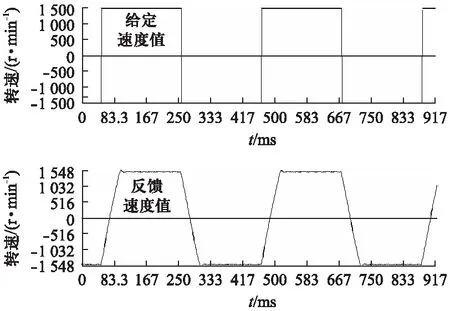
圖4 電機(jī)帶固定小負(fù)載的情況下的轉(zhuǎn)速跟蹤波形圖
由圖4可知,給定電機(jī)頻率為5Hz,轉(zhuǎn)速為1500r/min 時(shí),反饋速度上升時(shí)間快,超調(diào)量非常小。
(2) 電機(jī)帶可變負(fù)載情況下的轉(zhuǎn)速跟蹤波形如圖5所示。
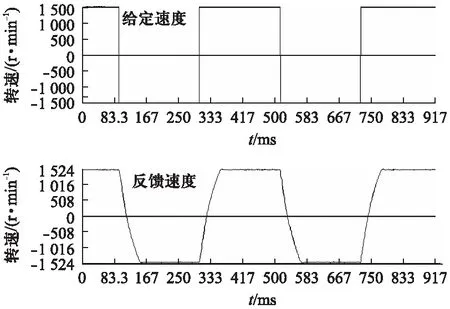
圖5 電機(jī)帶可變負(fù)載的情況下的轉(zhuǎn)速跟蹤波形圖
給電機(jī)帶上一個(gè)發(fā)電機(jī)和能耗電阻作為負(fù)載,由于電機(jī)所帶的負(fù)載是隨速度的增加而增加,且電流環(huán)已處于飽和值,故當(dāng)速度上升到一定值時(shí),電機(jī)的加速度變小,速度曲線變彎。但由圖5可知,反饋速度值仍上升很快,基本無(wú)超調(diào)。
4 結(jié) 語(yǔ)
本文設(shè)計(jì)以DSP芯片TMS320LF2407A作為主控制器,F(xiàn)PGA芯片EP1C3T144C8作為輔助控制器的全數(shù)字永磁同步伺服系統(tǒng),減少了系統(tǒng)功能對(duì)硬件電路的依賴,盡可能由DSP和FPGA的軟件實(shí)現(xiàn)。這不僅簡(jiǎn)化了系統(tǒng)結(jié)構(gòu),使系統(tǒng)獲得高精度和高可靠性,且大大增強(qiáng)了交流伺服系統(tǒng)的靈活性、可移植性和可擴(kuò)展性,為新型控制理論和方法的應(yīng)用提供了基礎(chǔ)。
【參考文獻(xiàn)】
[1] 秦憶.現(xiàn)代交流伺服系統(tǒng)[M].武漢: 華中理工大學(xué)出版社,1995.
[2] 尹泉.基于DSP的全數(shù)字交流伺服系統(tǒng)研究和設(shè)計(jì)[D].武漢: 華中科技大學(xué),2000.
[3] CHEN C L, LI C M, TU R J, et al. A novel simplified space vectormodulated control scheme for three-phase switch-mode rectifier[J]. IEEE Trans on Industrial Electronics, 1999(46): 512-515.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
