基于反饋線性化的直驅(qū)風(fēng)力發(fā)電機(jī)組控制系統(tǒng)
2014-08-08 11:38:00張文秀武新芳
電機(jī)與控制應(yīng)用 2014年8期
張文秀, 武新芳, 孫 娟
(1. 南京理工大學(xué) 能源與動(dòng)力工程學(xué)院,江蘇 南京 210094;2. 上海電力學(xué)院 能源與機(jī)械工程學(xué)院,上海 200090)
0 引 言
隨著化石能源的不斷消耗,以風(fēng)能為代表的可再生能源受到了世界各國(guó)的廣泛關(guān)注并得到了快速發(fā)展。截止2011年底,全球風(fēng)電裝機(jī)總?cè)萘窟_(dá)到237669MW,占全球總發(fā)電量的2.5%。2010年開始,中國(guó)已經(jīng)取代美國(guó)成為全球風(fēng)電裝機(jī)容量最大的國(guó)家[1]。風(fēng)力發(fā)電技術(shù)成為了國(guó)內(nèi)外研究的熱點(diǎn)。
控制技術(shù)是整個(gè)風(fēng)電系統(tǒng)的關(guān)鍵技術(shù)之一,研究風(fēng)電系統(tǒng)高性能的優(yōu)化控制方法,可提高機(jī)組能量裝換效率、輸出電能質(zhì)量以及可靠性[2]。風(fēng)電系統(tǒng)是一個(gè)復(fù)雜的非線性系統(tǒng)。風(fēng)速波動(dòng)范圍寬、機(jī)械阻尼的影響及空氣的氣動(dòng)力特性等造成了系統(tǒng)的控制困難[3]。傳統(tǒng)的控制方法在實(shí)現(xiàn)高精度控制上已顯不足,在風(fēng)速大范圍擾動(dòng)下,僅僅基于某一特定工況點(diǎn)附近線性化的模型所設(shè)計(jì)的控制器不能滿足控制性能要求。
近年,基于反饋線性化思想的非線性控制理論取得了很大進(jìn)展,成功解決了電機(jī)驅(qū)動(dòng)、電力系統(tǒng)等的非線性控制問題[4-7]。不同于局部線性化方法借助與不同工況點(diǎn)的線性近似,反饋線性化可以在大范圍內(nèi)實(shí)現(xiàn)精確解耦線性化,從而用線性最優(yōu)控制實(shí)現(xiàn)最大風(fēng)能捕獲,同時(shí)也能改善系統(tǒng)的動(dòng)態(tài)特性。本文基于反饋線性化理論,建立了直驅(qū)風(fēng)電機(jī)組模型,設(shè)計(jì)了非線性控制器,控制風(fēng)電機(jī)組能在最大功率曲線上運(yùn)行,并進(jìn)行仿真分析。仿真結(jié)果驗(yàn)證了所提出的控制策略的有效性。
1 直驅(qū)風(fēng)電機(jī)組模型
1.1 空氣動(dòng)力學(xué)模型
由空氣動(dòng)力學(xué)的Betz理論[8],風(fēng)力機(jī)的輸出功率為
(1)
輸出轉(zhuǎn)矩為
(2)
式中:ρ——空氣密度;
R——風(fēng)輪半徑;
ω——風(fēng)力機(jī)轉(zhuǎn)速;
λ——葉尖速比;
β——槳距角;
Cp(λ,β)——風(fēng)能利用系數(shù)。
1.2 傳動(dòng)系統(tǒng)模型
直驅(qū)風(fēng)電機(jī)組省去了傳統(tǒng)風(fēng)機(jī)中的齒輪箱,風(fēng)力機(jī)轉(zhuǎn)軸直接與發(fā)電機(jī)轉(zhuǎn)子相連。為簡(jiǎn)化分析,忽略傳動(dòng)系統(tǒng)的柔性和損耗,則直驅(qū)型同步發(fā)電機(jī)組的軸系動(dòng)態(tài)方程可用一階動(dòng)態(tài)微分方程表示[9],如式(3)所示。
(3)
式中:Te——電磁轉(zhuǎn)矩;
Jeq——機(jī)組等效轉(zhuǎn)動(dòng)慣量;
Bm——轉(zhuǎn)動(dòng)粘滯系數(shù)。
1.3 PMSG模型
經(jīng)過Park變換,可得d、q軸同步旋轉(zhuǎn)坐標(biāo)系下PMSG的數(shù)學(xué)模型[10]為
(4)
式中:R——定子電阻;
ud、uq——d軸、q軸的定子電壓;
Ld、Lq——定子d、q軸的電感;
id、iq——定子d、q軸的電流;
p——極對(duì)數(shù);
φm——永磁體產(chǎn)生的磁通;
ωe——轉(zhuǎn)子旋轉(zhuǎn)的電角速度,ωe=pω。
本文將發(fā)電機(jī)的終端等效成由一固定電感Ls和可變電阻Rs的負(fù)載,其中Rs是控制變量,其阻值隨著變換器的控制脈沖占空比的變化而變化[11]。直驅(qū)風(fēng)電機(jī)組的等效控制模型如圖1所示。
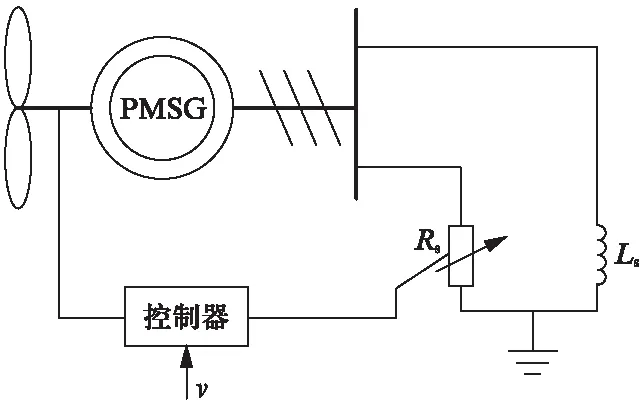
圖1 直驅(qū)風(fēng)電機(jī)組的等效控制模型
2 反饋線性化原理
反饋線性化是設(shè)計(jì)非線性系統(tǒng)反饋控制器的一種方法,主要思想是利用微分幾何工具,通過非線性反饋和同胚映射,將非線性系統(tǒng)全部或部分轉(zhuǎn)換為線性系統(tǒng)[12]。它主要通過狀態(tài)反饋和坐標(biāo)變換,得到精確線性化,在整個(gè)狀態(tài)空間都有效,這與傳統(tǒng)的線性化方法只在系統(tǒng)工況點(diǎn)附近進(jìn)行線性化有很大的區(qū)別,具體的過程如下。
設(shè)有單輸入輸出的仿射非線性系統(tǒng)[13]為

(5)
式中,x是狀態(tài)向量,f(x)和g(x)為矢量函數(shù)。
如果非線性系統(tǒng)的相對(duì)階與系統(tǒng)階相等,那么系統(tǒng)將能夠通過選定一個(gè)坐標(biāo)閉環(huán),全局線性化為一個(gè)線性系統(tǒng),反之,則可實(shí)現(xiàn)部分線性化。
選擇坐標(biāo)映射,得
z(x)=[h(x) Lfh(x) … Lfn-1h(x)]T
(6)
則系統(tǒng)變換為
(7)
式中,υ為線性化系統(tǒng)虛擬輸入變量向量,系數(shù)矩陣A、B、C分別為

系統(tǒng)線性反饋化控制的基本思想是反復(fù)對(duì)輸出變量y求導(dǎo),直到y(tǒng)的表達(dá)式中出現(xiàn)有輸入變量u為止,然后再設(shè)計(jì)u來抵消非線性項(xiàng)。
首先對(duì)輸出變量y求導(dǎo),得
(8)
如果上式中的Lgh(x)≠0,則y的表達(dá)式中包含輸入變量u,此時(shí)可取輸入量為
(9)
就可得到y(tǒng)與v的線性控制關(guān)系y=v。反之,如果Lgh(x)=0,則繼續(xù)對(duì)y求導(dǎo),直到LgLfn-1h(x)≠0為止,此時(shí)有
(10)
可得到原非線性系統(tǒng)的控制律為
(11)
由上式可以看出,一旦v確定,控制量u也隨之確定。
3 非線性控制器設(shè)計(jì)
3.1 系統(tǒng)控制目標(biāo)
風(fēng)電機(jī)組的控制目標(biāo)主要是在額定風(fēng)速以下,實(shí)現(xiàn)最大風(fēng)能捕獲,額定風(fēng)速以上,機(jī)組按恒功率方式運(yùn)行。對(duì)于特定的風(fēng)力機(jī),都有一條特定的最優(yōu)的轉(zhuǎn)速-功率曲線,最優(yōu)功率曲線可以通過實(shí)驗(yàn)確定,生產(chǎn)廠家可以將最優(yōu)功率曲線整定進(jìn)系統(tǒng),風(fēng)電機(jī)組的功率控制目標(biāo),就是使得機(jī)組運(yùn)行在最優(yōu)功率曲線上[14]。本文以最優(yōu)轉(zhuǎn)速yref=ωref作為轉(zhuǎn)速參考值,控制系統(tǒng)通過調(diào)節(jié)可變電阻Rs的大小,實(shí)現(xiàn)風(fēng)能最優(yōu)功率的追蹤控制。
3.2 直驅(qū)風(fēng)電機(jī)組的仿射模型
(12)
(13)
h(x)=ω
(14)
3.3 線性化條件檢驗(yàn)
計(jì)算系統(tǒng)的相對(duì)階,輸出函數(shù)關(guān)于f(x)和g(x)的Lie導(dǎo)數(shù)為
Lfh(x)=d1v2+d2vx3+d3x32-d4x2,
LgLfh(x)≠0。
由于LgLfh(x)≠0,n=1,所以系統(tǒng)的相對(duì)階為2,而系統(tǒng)階為3,故只能實(shí)現(xiàn)部分線性化。
3.4 控制器設(shè)計(jì)
將系統(tǒng)的數(shù)學(xué)模型部分線性化,首先要進(jìn)行坐標(biāo)變換[15],以滿足可微分條件。引入Z坐標(biāo),非線性Z坐標(biāo)變換為
(15)
經(jīng)過Z坐標(biāo)變換的線性系統(tǒng)狀態(tài)方程為
(16)
設(shè)yref為輸出y要跟蹤的參考輸入,為了使系統(tǒng)在穩(wěn)態(tài)時(shí)無靜態(tài)偏差,引入誤差ε=yref-y,此時(shí)誤差的積分量為

兩邊積分得
uv=-k1z1-k2z2-k3ε,由反饋線性化原理可知,非線性系統(tǒng)的輸入u與控制輸入uv的關(guān)系為
(17)
式中,uv通過選取適當(dāng)加權(quán)陣Q=diag(400,400,0),R=1。利用MATLAB函數(shù)care()求解代數(shù)Riccati(黎卡提)矩陣[K,P,L]=care(A,B,Q,R)求得[16],其中L是閉環(huán)狀態(tài)方程參數(shù)矩陣特征值,P是代數(shù)黎卡提方程的解,K為最優(yōu)反饋線性矩陣。求解結(jié)果為
uv=-4000z1-150z1-30000ε
本文設(shè)計(jì)的線性系統(tǒng)的狀態(tài)反饋框圖如圖2所示,狀態(tài)反饋部分為L(zhǎng)ie導(dǎo)數(shù)Lf2h(x)和LgLfh(x)。

圖2 線性系統(tǒng)狀態(tài)反饋控制框圖
4 仿真分析
為了驗(yàn)證本文基于反饋線性化理論設(shè)計(jì)的非線性控制器的正確性和有效性,利用MATLAB/Simulink仿真平臺(tái)搭建了直驅(qū)風(fēng)電機(jī)組模型,分別采用階躍風(fēng)速和隨機(jī)風(fēng)速進(jìn)行仿真以驗(yàn)證系統(tǒng)保持最優(yōu)功率運(yùn)行的能力。仿真主要參數(shù)如表1所示。
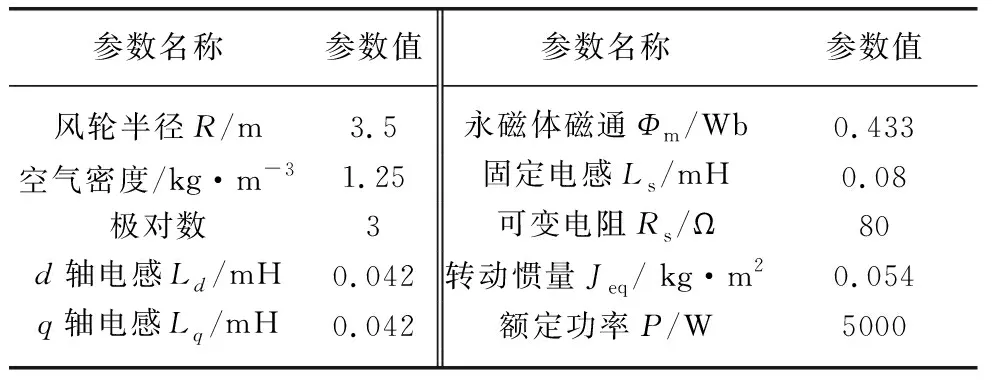
表1 仿真參數(shù)
應(yīng)用反饋線性化控制的功率曲線追蹤框圖如圖3所示。
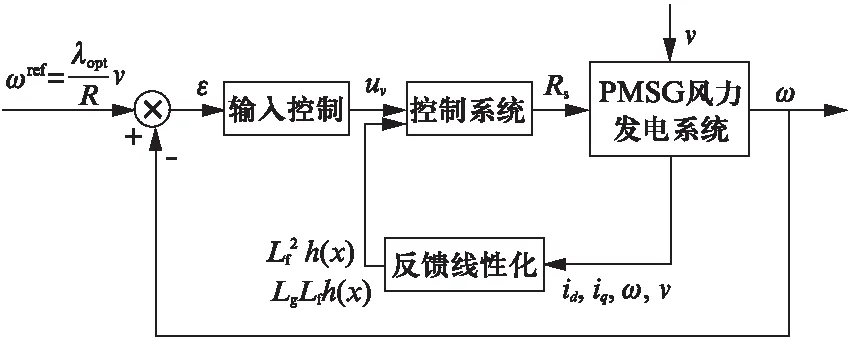
圖3 基于直驅(qū)風(fēng)電機(jī)組的反饋線性化控制框圖
4.1 階躍風(fēng)速
在t=25s時(shí),風(fēng)速由7m/s階躍到9m/s時(shí)的仿真結(jié)果如圖4所示。
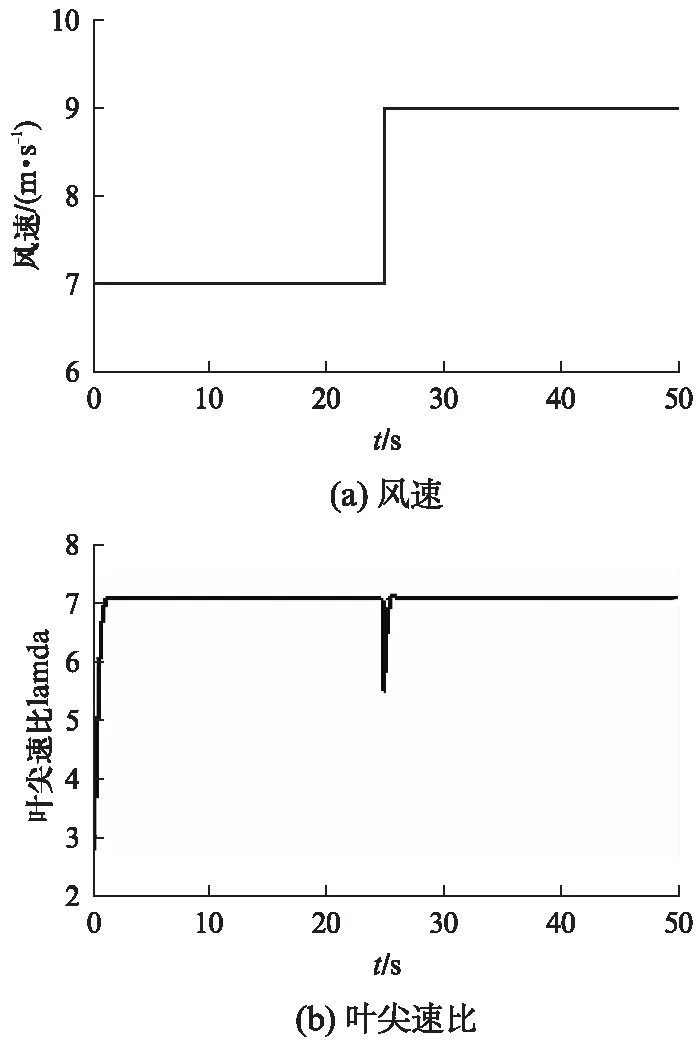
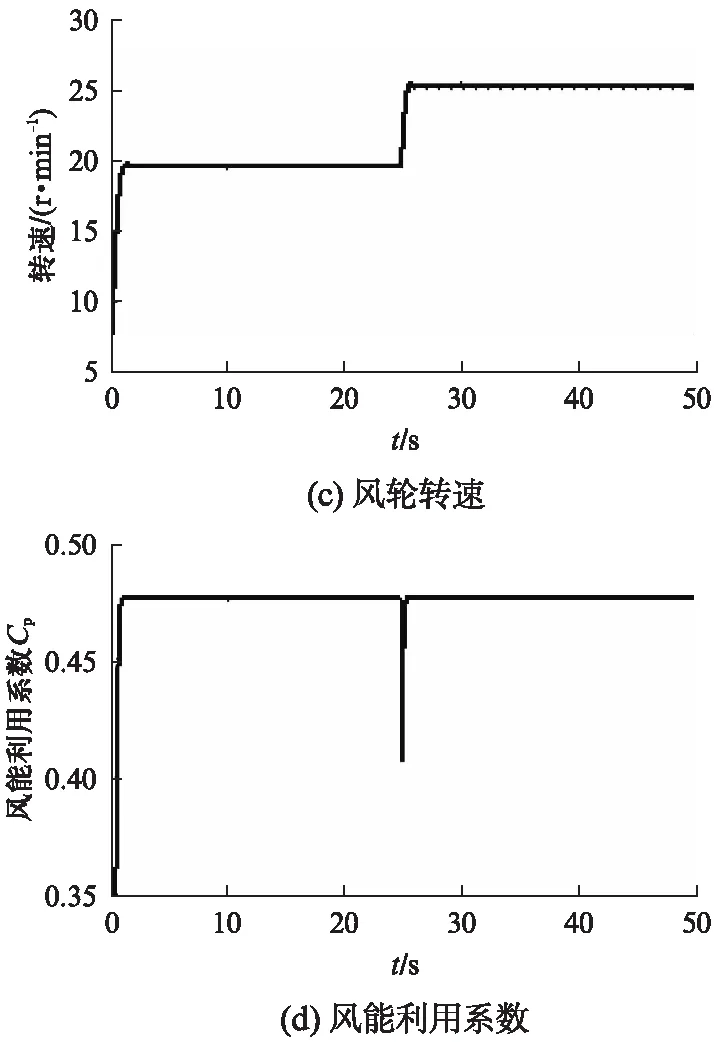
圖4 階躍風(fēng)速下仿真結(jié)果
由圖4可看出,當(dāng)風(fēng)速上升時(shí),由于風(fēng)力機(jī)所受的力矩變大,風(fēng)輪轉(zhuǎn)速隨之上升,風(fēng)能利用系數(shù)基本維持在0.47~0.48,與葉尖速比的變化趨勢(shì)吻合。
4.2 風(fēng)速擾動(dòng)
風(fēng)速擾動(dòng)下仿真結(jié)果如圖5所示,平均風(fēng)速為8m/s,波動(dòng)范圍為5~11m/s。

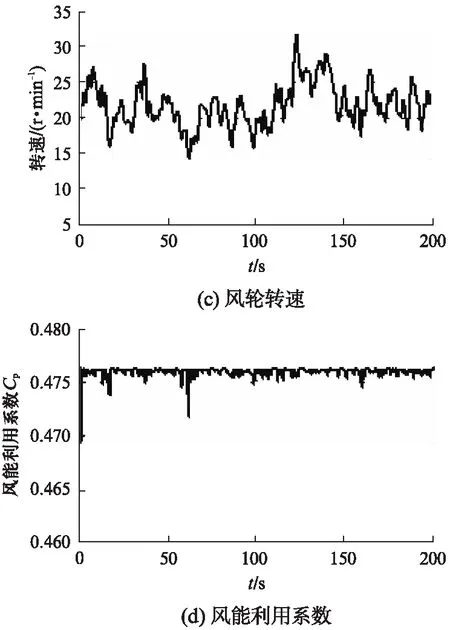
圖5 風(fēng)速擾動(dòng)下仿真結(jié)果
由圖5可看出,在風(fēng)速擾動(dòng)情況下,控制器響應(yīng)迅速,使機(jī)組的輸出在其后的輸出超調(diào)量很小,風(fēng)輪轉(zhuǎn)速跟隨變化,由于建模過程中忽略了傳動(dòng)系統(tǒng)的柔性和損耗,機(jī)械能由風(fēng)力機(jī)傳遞到發(fā)電機(jī)轉(zhuǎn)子,同時(shí)發(fā)電機(jī)也是按照理想電機(jī)的條件進(jìn)行建模,實(shí)際風(fēng)機(jī)模型中存在的如機(jī)械摩擦造成的遲滯現(xiàn)象并未表現(xiàn)得明顯,風(fēng)能利用系數(shù)在0.476上下幅值內(nèi)小范圍波動(dòng),葉尖速比恒定在7附近,控制效果較好。
基于反饋線性化理論設(shè)計(jì)的直驅(qū)風(fēng)電系統(tǒng)在風(fēng)速階躍變化和擾動(dòng)時(shí),響應(yīng)迅速且平穩(wěn),超調(diào)量很小,具有較強(qiáng)的魯棒性,風(fēng)輪轉(zhuǎn)速能夠動(dòng)態(tài)跟蹤風(fēng)速的變化,風(fēng)能利用系數(shù)Cp和葉尖速比λ在最優(yōu)值附近波動(dòng),即表明機(jī)組運(yùn)行在最優(yōu)功率曲線上,這有利于風(fēng)電機(jī)組的良好運(yùn)行和降低負(fù)荷波動(dòng)引起的不良影響。仿真結(jié)果驗(yàn)證了所提出控制策略的正確性及所設(shè)計(jì)的控制器良好的性能,能實(shí)現(xiàn)風(fēng)電機(jī)組最優(yōu)功率的跟蹤控制,具有良好的閉環(huán)控制效果。必須指出的是,所提出的控制策略在機(jī)組起始運(yùn)行階段響應(yīng)較慢,穩(wěn)定性不太好,這還需要進(jìn)一步的深入研究。
5 結(jié) 語
為了提高直驅(qū)風(fēng)力發(fā)電機(jī)組的控制性能,使得風(fēng)電機(jī)組能運(yùn)行在最優(yōu)功率曲線上,本文提出了一種反饋線性化控制策略,建立了風(fēng)電機(jī)組各個(gè)組成部分的模型,并在所設(shè)計(jì)出的對(duì)應(yīng)控制器的基礎(chǔ)上進(jìn)行仿真驗(yàn)證。仿真結(jié)果證明該控制策略對(duì)風(fēng)速變化具有很好的魯棒性,并且具有較好的動(dòng)態(tài)控制性能這對(duì)于實(shí)際風(fēng)力發(fā)電系統(tǒng)控制器的優(yōu)化設(shè)計(jì)和研發(fā)有一定的參考意義。
【參考文獻(xiàn)】
[1] Global Wind Energy Council. Global wind report-annual market update 20011[R]. Brussels Belgg-ium: Global Wind Energy Council, 2012.
[2] 李元龍,朱蕓,紀(jì)志成.風(fēng)能轉(zhuǎn)換系統(tǒng)優(yōu)化控制策略綜述[J].微特電機(jī),2009,2(2): 59-63.
[3] SENJYU T, SAKAMOTO R, URASAKI N, et al. Output power leveling of wind turbine generator for all operating regions by pitch angle control[J]. IEEE Transactions on Energy Conversion, 2006, 21(2): 467- 475.
[4] LEE T S. Input-output linearization and zero-dy-namics control of three-phase AC/DC voltage-source converters[J]. IEEE Transactions on Power Electronics, 2003,18(1): 11-22.
[5] 石峰,查曉明.應(yīng)用微分幾何理論的三相并聯(lián)型有源電力濾波器解耦控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2008,28(15): 92-97.
[6] 樂江源,謝運(yùn)祥,張志,等.三相有源電力濾波器精確反饋線性化空間矢量PWM復(fù)合控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,30(15): 32-39.
[7] 江道灼,張振華.單相H 橋級(jí)聯(lián)靜止同步補(bǔ)償器反饋線性化解耦控制[J].電網(wǎng)技術(shù),2011,35(11): 74-79.
[8] 葉杭冶.風(fēng)力發(fā)電機(jī)組的控制技術(shù)[M].北京: 機(jī)械工業(yè)出版社,2006.
[9] 陳浩,胡曉波,嚴(yán)干貴,等.直驅(qū)永磁風(fēng)力發(fā)電機(jī)組低電壓穿越的協(xié)調(diào)控制策略[J].電網(wǎng)技術(shù),2013,37(5): 1466-1470.
[10] ARKADAN A A, VYAS R. Effects of toothless stator design on dynamic model parameters of permanent magnet geneators[J]. IEEE Transactions on Energy Conversion, 1993, 8(2): 243-250.
[11] NICOLAS A C, EMIL C, ANCA D H, et al.Robust multi-model control of an autonomous wind power system [J]. Wind Energy, 2006, 9(5): 399- 419.
[12] 林輝,王永賓,計(jì)宏.基于反饋線性化的永磁同步電機(jī)模型預(yù)測(cè)控制[J].測(cè)控技術(shù),2011,30(3): 53-57.
[13] JEAN-JACQUES E S. Applied nonlinear control [M]. Beijing: China Machine Press, 2004.
[14] 嚴(yán)干貴,魏治成,穆鋼,等.直驅(qū)永磁同步風(fēng)電機(jī)組的最優(yōu)功率控制[J].電機(jī)與控制學(xué)報(bào), 2009, 1(13): 56-60.
[15] INLIAN M, ANTONETA I B, NICOALS A C, et al.Optimal control of wind energy systems[M]. London: Springer, 2008.
[16] 劉豹.現(xiàn)代控制理論[M].北京: 機(jī)械工業(yè)出版社,2000.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
能源工程(2020年6期)2021-01-26 00:55:22
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
