變增益分段滑模控制的PMSM位置伺服系統研究
2014-08-04 02:38:46高鋒陽秦超莊圣賢董唯光
計算機工程與應用 2014年22期
關鍵詞:系統
高鋒陽,秦超,莊圣賢,董唯光
1.蘭州交通大學自動化與電氣工程學院,蘭州 730070
2.沈陽鐵路局科學技術研究所,沈陽 110013
3.西南交通大學電氣工程學院,成都 610031
變增益分段滑模控制的PMSM位置伺服系統研究
高鋒陽1,秦超2,莊圣賢3,董唯光1
1.蘭州交通大學自動化與電氣工程學院,蘭州 730070
2.沈陽鐵路局科學技術研究所,沈陽 110013
3.西南交通大學電氣工程學院,成都 610031
1 引言
永磁同步電動機(Permanent Magnet Synchronous Motor,PMSM)優點多,應用廣,是目前研究的熱點電機之一[1]。滑模變結構控制對外界擾動、系統參數變化不敏感等優點,在永磁同步電機魯棒性控制中具有重要意義。為解決傳統PID控制位置伺服系統難以有效滿足其高性能要求等問題,國內外學者已有將滑模變結構控制方法應用于永磁同步電機,并取得了一定的成果[2-3]。文獻[4]將梯形速度波形設計成指數形式,并用兩段滑模代替四段,優點是結構簡單平滑穩定,但同時帶來的不足就是快速性降低,并且存在抖振。文獻[5]設計4個滑模面快速跟蹤給定位置,但設計過于復雜,預估算信息繁瑣,也降低了系統精度。文獻[6]應用飽和函數代替開關函數,在一定范圍內抖振得到抑制,但魯棒性得到削弱。文獻[7]通過|s|變化規律,將固定增益設計成變增益,抖振得到明顯抑制,魯棒性得到增強。文獻[8]設計一種滑模控制器對控制量先微分后積分,使輸出不含非線性項,減小抖振,不足是使系統變得復雜難于實現,且快速性降低。文獻[9-10]將模糊控制、自適應控制與滑模控制相結合來抑制抖振,但定位過程中響應速度較慢。
為了提高永磁同步電機位置伺服系統的動靜態品質。本文利用位置信號誤差、滑模面積分與滑模增益的關系,構造出新型切換項變增益滑模控制器;并將單段滑模線控制擴展成PI與滑模分段控制;其中新型滑模控制器采用簡化位置、速度控制器一體化的思想。通過仿真分析驗證結果表明,該控制器提高了系統的魯棒性,位置伺服系統的動靜態性能得到增強,并且系統得以簡化,易于工程實現。
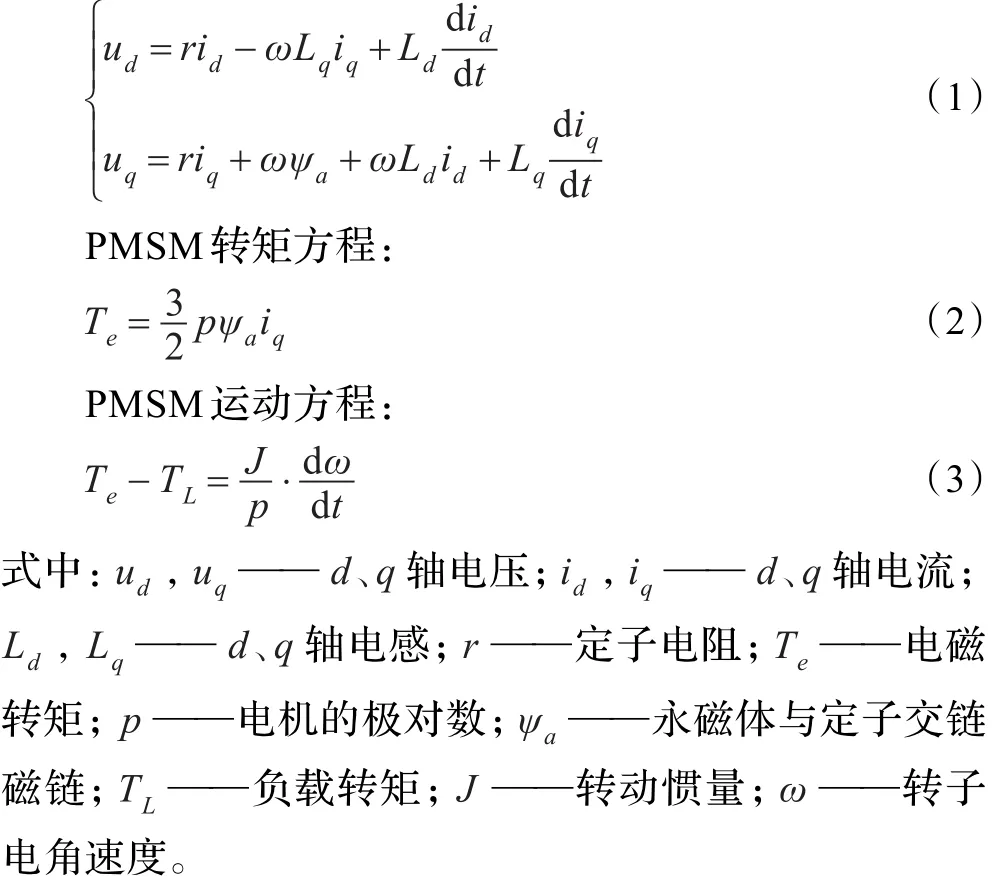
2 永磁同步電機的數學模型
為了方便分析,簡化PMSM數學模型[11],首先對電機做如下假設:
(1)忽略鐵心飽和、渦流和磁滯的影響,認為磁路線性,可用疊加原理分析。
(2)忽略電機繞組漏感,永磁材料的磁阻為零。
(3)轉子上沒有阻尼繞組,定子繞組三相對稱。
(4)定轉子繞組產生的氣隙磁場正弦分布,忽略磁場的高次諧波。采用id=0的轉子磁場定向控制。電壓方程[12]如下:
3 控制器的設計
3.1 傳統滑模變結構控制器的設計
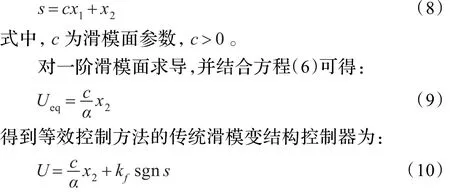
滑模變結構控制是對非線性不確定系統的一種有效的綜合控制方法,其基本思想是設計一預設滑模面,保證從任意一點出發的狀態軌跡通過控制器的作用引導到預設的滑模面,并保證系統在滑模面上的運動是漸近穩定的。本文采用的等效控制方法是由等效控制部分Ueq和切換控制部分kfsgns組成。Ueq是滑模運動的控制量,對于標稱系統F=0,滑模面的運動滿足ds/dt=0,由此可得Ueq值。實際系統控制中,為保證系統在擾動情況下仍保持趨向滑模面及穩定點,故引入kfsgns。等效控制方程[13]為:
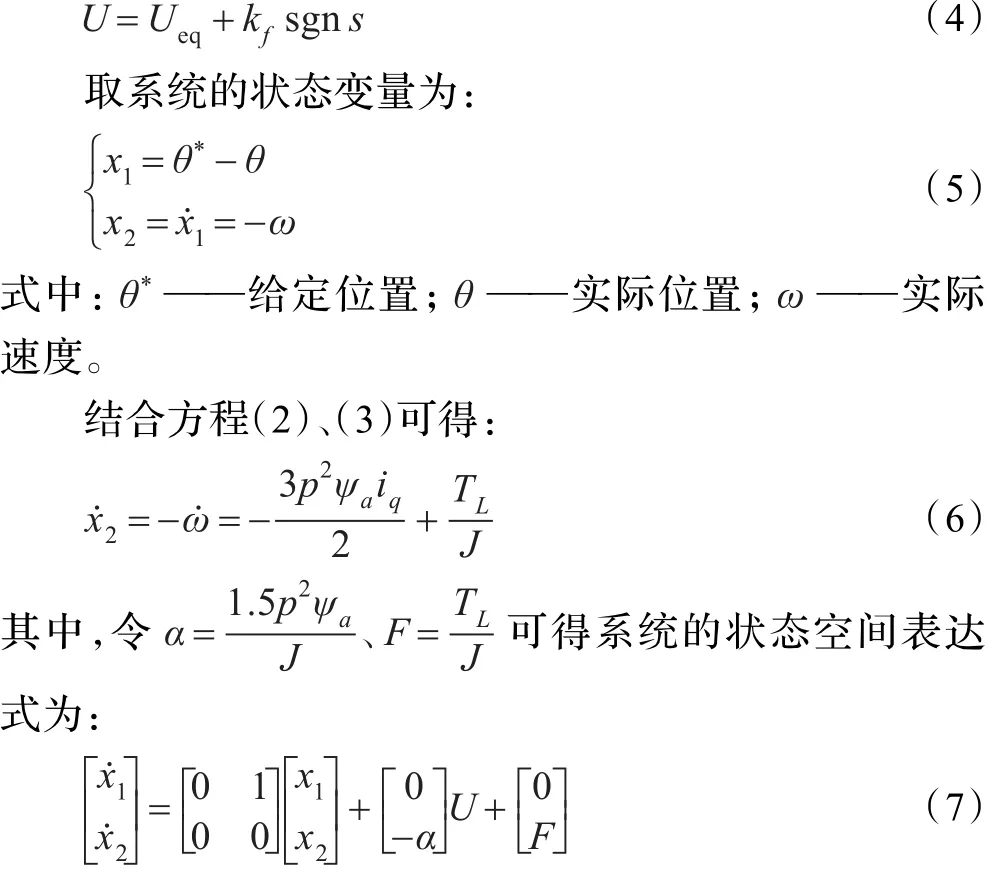
為了使系統無超調地到達穩定,選擇一階滑模面[14]:
3.2 改進的滑模變結構控制器設計
傳統等效控制方法中kf的大小影響系統魯棒性能和滑模抖振強度。kf值越大系統魯棒性能越好,但同時抖振的增大會影響控制器的性能。本文設計一種新型控制器,即:

傳統的切換項增益的選取為固定值,不能滿足系統不同運動階段的動態要求。本文中對增益做出改進,其中,當s初始值較大時,滑模增益在滿足系統魯棒性要求的同時會帶來不必要的過大滑模抖振,因此,在改進中引入變量k2進行調節;當s趨近于0時,s的積分項趨近于一個較小常數,過小的滑模增益同樣對系統帶來不穩定等不利的影響,所以引入變量k1進行補償;此外,引入位置誤差變量|x|對系統進行自動調節,保證系統運動過程中在無限接近穩定點時,位置誤差不斷減小,并最終實現到達穩定點時,保證滑模切換項增益為0,進一步達到削弱抖振的目的[15]。
結合方程(10)、(11)可得最終控制量U:
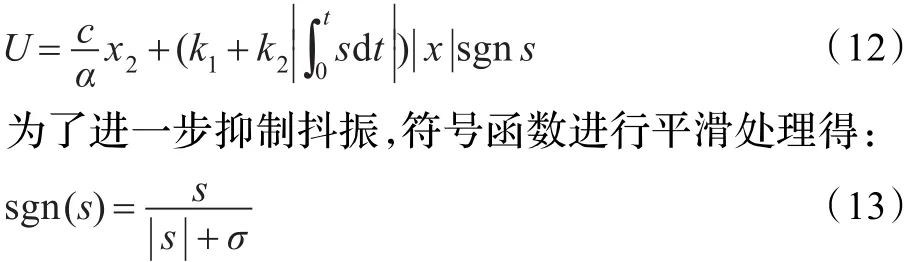
式中,σ為一個數值較小的正常數。
3.3 穩定性分析
滑模存在和穩定的基本條件,可利用Lyapunov穩定性理論[16]進行分析,取Lyapunov函數為:

由于SMC的可達性條件為ss˙<0,所以保證V˙(x)<0,即能保證系統進入滑動模態。由方程(7)、(8)可得:
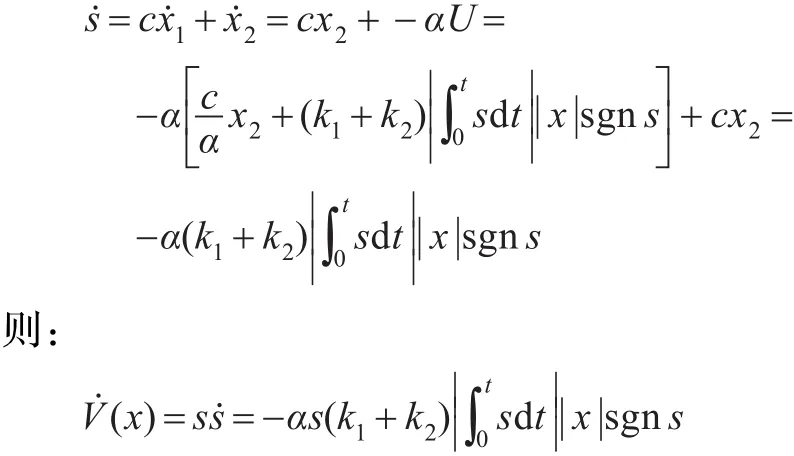
其中k1、k2>0,s·sgn(s)≥0,α>0,所以s<0。即進入滑模面后系統進入滑模運動,系統是穩定的。
3.4 滑模變結構控制與PI分段控制
根據定位時間最優原則,通常將速度曲線設計成梯形,一般分四個階段:加速段、恒速段、減速段和位置接近段,如圖1所示。
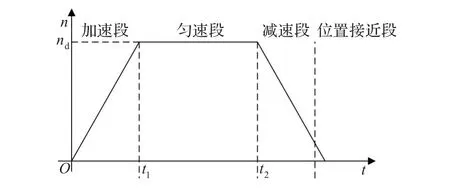
圖1 電機伺服系統的梯形速度曲線
為獲得良好的梯形跟蹤速度曲線,國內外學者提出以下兩種主要解決方法:(1)根據系統運行的加速度、減速度、勻速段和位置接近段四個階段分別設計四個滑模面。這種方法位置、加速度等信息需要預估算,且滑模面多,系統比較復雜,較難實現。(2)加速和減速階段采用結構不變的控制方式,以限定的最大加速、減速進行啟動運行。在恒速段和位置接近段采用滑模控制,提高系統魯棒性和定位精度。這種方法雖然系統得到簡化,但在給定位置較小時,切換點速度過大,會引起較大電流沖擊,且這樣設計沒有減少實際切換量。
針對以上問題,本文采用滑模變結構控制與PI控制分段控制的組合控制器。其中加速段采用不變的PI控制方法,以限定的最大加速進行啟動運行;恒速段、減速段和位置接近段應用滑模變結構控制的強魯棒性及優良的動靜態性能設計成單段滑模進行控制;應用Simulink設計出PI與SMC切換開關模塊。采用兩段控制代替之前的四段控制方法,既能完全滿足系統位置伺服快速跟蹤給定的設計要求,又簡化滑模面設計,減少切換次數,提高了系統魯棒性的同時,對抖振進行抑制。
4 仿真分析
為了驗證新型分段控制器的性能,建立Simulink系統仿真模型,電機參數如下:Rs=2.875 Ω;Ld=Lq= 0.008 5 H;ψa=0.175 Wb;J=0.008 kg·m2;極對數p=4。系統仿真框圖如圖2所示,其中滑模變結構與PI分段控制器模塊如圖3所示。
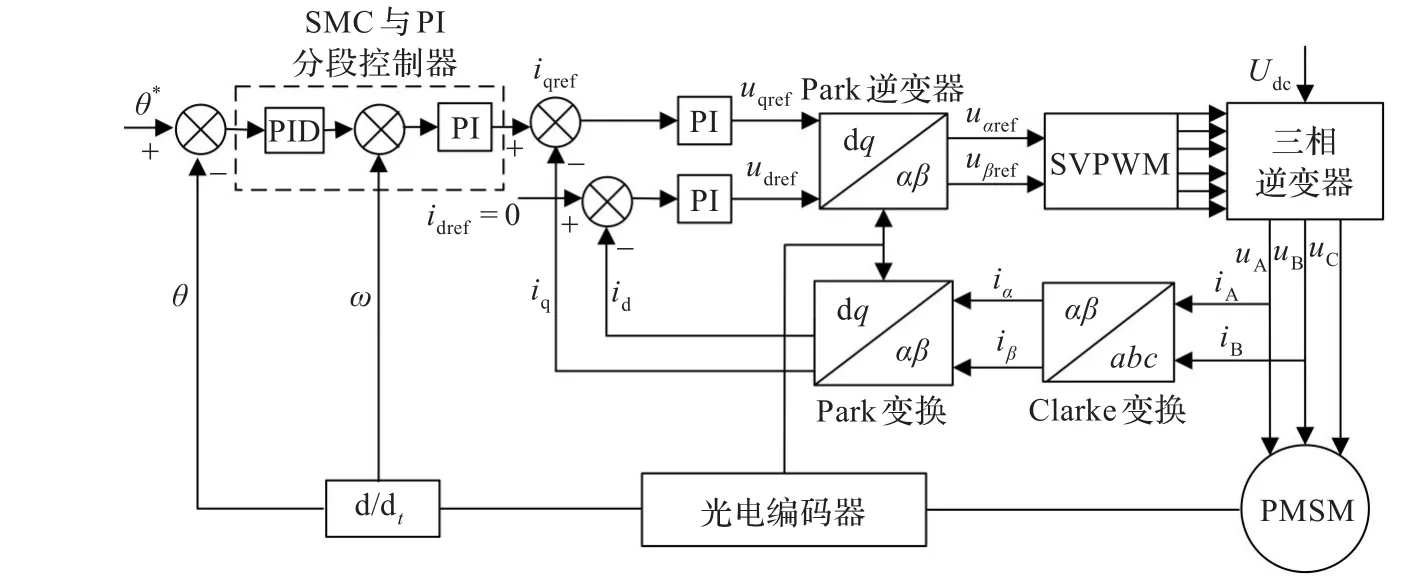
圖2 永磁同步電機伺服控制系統框圖
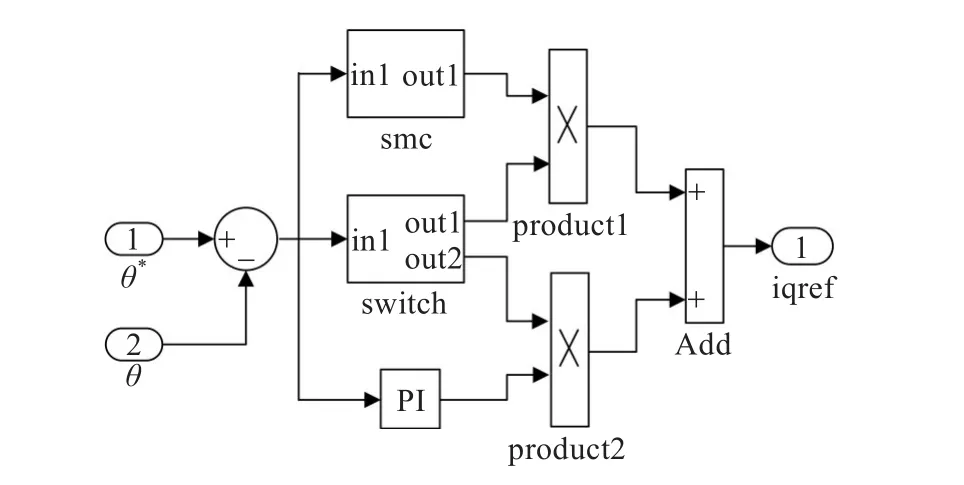
圖3 滑模控制與PI分段控制器
圖4為系統給定大位置50π時速度波形仿真結果。可見圖4(a)中PI控制下,系統啟動存在較大超調,且轉速恢復到穩定調整時間較長。速度穩定運行階段波形存在少量波動。位置接近段速度調整到零點的時間較長,位置到達給定值后,轉速波形平滑穩定;圖4(b)中傳統滑模變結構控制器作用下,系統啟動迅速,超調量較PI控制條件下有所減小,恢復轉速穩定過程較快。穩定運行階段速度波形較穩定,對波動有了很好的抑制。轉速過渡到零點調整時間較PI控制明顯縮短,不足的是在位置到達給定值后,系統存在的滑模固有抖振明顯。圖4(c)中改進的分段滑模控制較傳統未分段SMC、PI控制啟動更快,超調更小,調整到達轉速穩定時間更短,轉速穩定運行更為平滑。位置接近段過渡到達零點的轉速調整時間較傳統未分段滑模進一步縮短。與圖4(b)對比可以清楚得出,在到達給定位置后,改進型分段滑模控制的系統轉速相比未分段傳統滑模控制器的固有抖振有了明顯抑制。
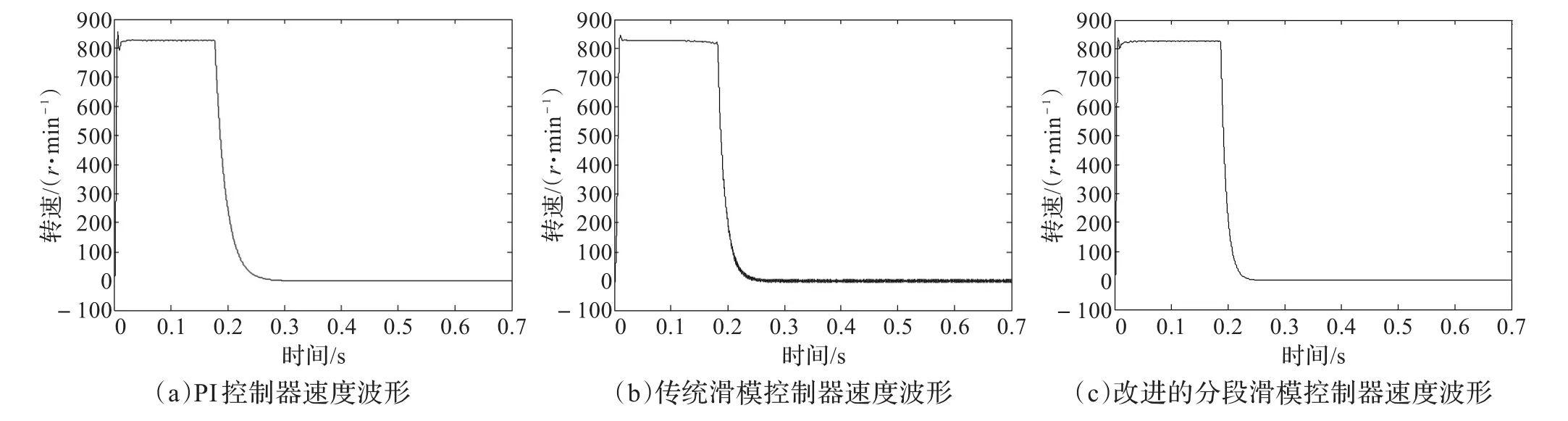
圖4 系統給定大位置速度波形
圖5為系統給定大位置50π時轉矩響應波形。圖5(a)中傳統SMC控制轉矩波形抖振較大;圖5(b)中為改進的分段滑模變結構控制器轉矩波形,可以看到,在0.01 s時刻,轉矩達到最大值,為電機快速啟動提供最大助力,此后轉矩開始調整,在0.015 s時與傳統未分段滑模波形圖比較可得,改進型滑模分段控制轉矩值更小,即能保證系統制動能力更強,且更快速地到達穩定。在0.02 s時波形恢復到穩定負載轉矩值,此過程為超調量調整階段。系統運行到0.18 s時,轉矩突降到最小值為位置接近段提供制動,保證系統快速無超調地跟蹤給定位置值。經過0.05 s的調整,轉矩再次恢復到穩定值,并保持該狀態持續運行。通過圖5(a)和圖5(b)波形對比可得在轉速穩定段、位置接近段改進的分段滑模控制方法對滑模固有抖振抑制明顯,并且電機啟動和系統調整時間的快速性等方面較傳統未分段滑模有所提高。
圖7(a)為改進的分段滑模變結構控制系統給定大位置50π并在0.1 s時突增負載的速度波形仿真結果,由圖可以看到,轉速在0.1 s時發生變化,快速下降,并在0.15 s無超調平滑的到達新的穩定。可見穩定后轉速波形仍對系統波動和滑模抖振有很好的抑制作用,并在0.25 s時第二次快速平滑的到達新的穩定狀態。通過圖7(b)與圖6即改進型滑模分段控制突增負載與恒負載運行的位置仿真波形對比可得,在0.1 s突增負載時改進型分段滑模控制下的位置波形無較大波動,且波形實現平滑過渡。通過以上仿真結果可以充分驗證改進型滑模分段控制下的系統在外界擾動的情況下,仍能保持良好性能,且具有較強魯棒性。
圖8為改進型分段滑模控制器小位置4.5π給定的速度波形,可以看到轉速在0.02 s時有小幅波動,這是因為位置即將到達額定值,為了使電機沒有太大超調而必須使轉矩施加反力,對電動機產生制動的效果,這樣有利于使位置精確定位。由小位置給定仿真圖可得,改進型分段滑模控制系統性能穩定,在給定不同初始條件時,系統仍能保持良好性能。
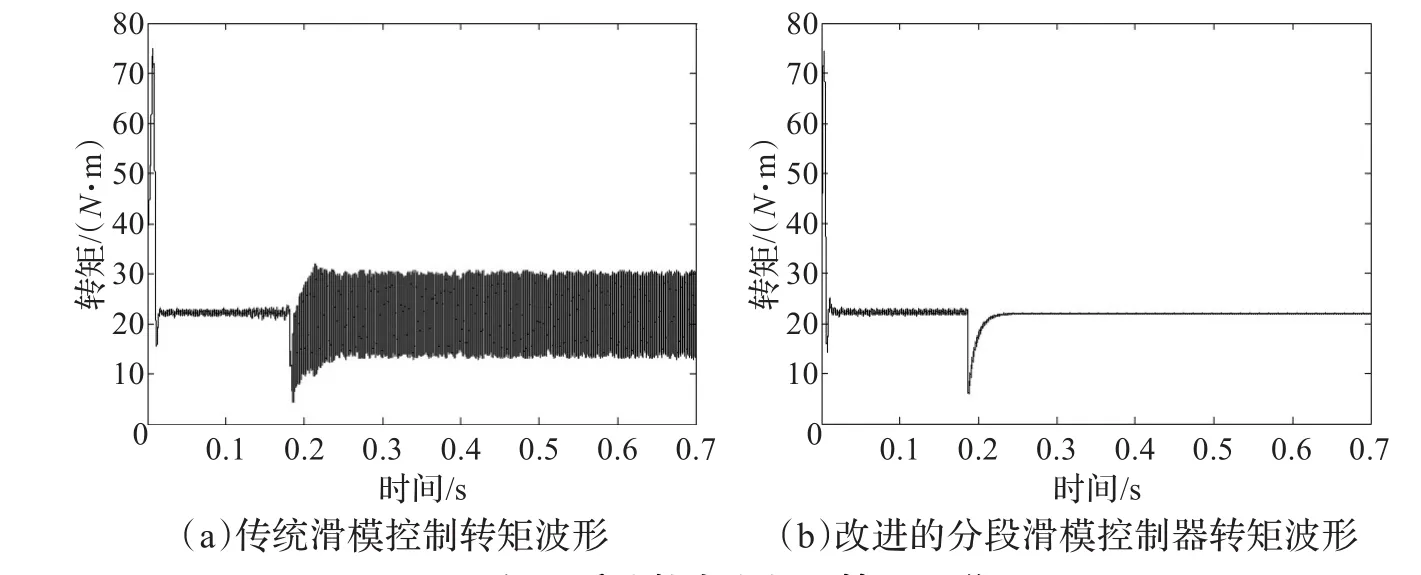
圖5 系統給定大位置轉矩波形
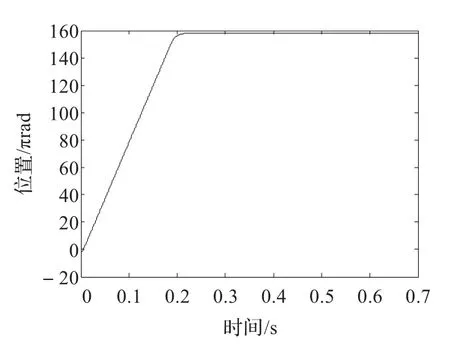
圖6 改進SMC給定大位置位置波形
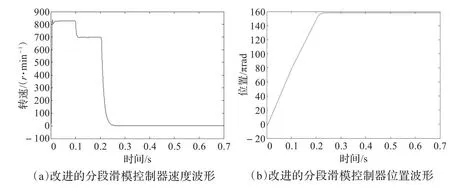
圖7 系統給定大位置突增負載響應波形
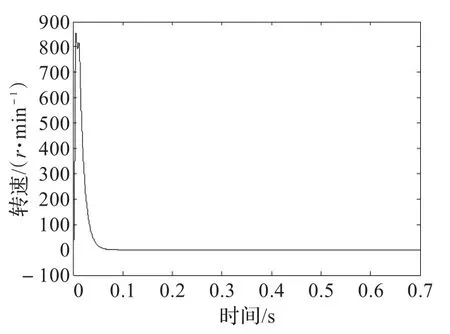
圖8 系統給定小位置時改進的分段滑模控制器速度波形
5 結束語
針對滑模變結構控制應用于永磁同步電機位置伺服系統中出現的問題,提出一種新穎的變參數滑模變結構等效控制方法;將傳統的4段滑模控制簡化為PI與滑模分階段作用的兩段控制,并自主設計出切換開關模塊。該設計方法很好地解決了滑模切換面過多,電流沖擊大等問題,其主要優點有:
(1)減少滑模面、切換量數目,對系統進行簡化,易于實際應用。
(2)對滑模固有抖振抑制明顯,提高了位置伺服系統精度。
(3)系統魯棒性及動靜態性能突出,速度波形啟動時超調量小,調整時間少;減速段到位置接近段快速性明顯增強。
在永磁同步電機位置伺服系統中,提出將改進的變增益滑模等效控制方法與傳統PI控制相結合組成分段控制器。仿真結果表明新型分段滑模控制器魯棒性優于PI調節器和傳統未分段滑模調節器,對滑模固有抖振抑制明顯,并使系統能快速跟蹤給定位置。該方法使永磁同步電機位置伺服系統性能得到提升。
[1]Kuo-Kai,Lai Chiu-Keng,Tsai Yao-Wen.A newly robust controller design for the position control of permanent magnet synchronousmotor[J].IEEETransactionsonIndustrial Electronics,2002,49(3):558-565.
[2]陳榮.永磁同步電機控制系統[M].北京:中國水利水電出版社,2010:1-27.
[3]陳志梅,王貞艷,張井崗.滑模變結構控制理論及應用[M].北京:電子工業出版社,2012:1-13.
[4]胡強暉,胡勤豐.全局滑模控制在永磁同步電機位置伺服中的應用[J].中國電機工程學報,2011,31(18):61-66.
[5]Lai C,Shyu K.A novel motor drive design for incremental motion system via sliding-mode control method[J].IEEE Transactions on Industrial Electronics,2005,52(2):499-507.
[6]Zhang D Q,Panda S K.Chattering-free and fast response sliding mode controller[J].IEEE Pro-Control Theory,1999,146(2):171-177.
[7]Wu S T,Shao Y J.Adaptive vibration control using a virtualvibration-absorbercontroller[J].JournalofSoundand Vibration,2007,305(45):891-903.
[8]黃佳佳,周波,李丹,等.滑模控制永磁同步電機位置伺服系統抖振[J].電工技術學報,2009,24(11):41-47.
[9]馬義方,蔡際令,王雄海.伺服系統的自適應模糊滑模最優控制研究[J].浙江大學學報,2006,40(6):1032-1035.
[10]Lin F J,Chiu S L.Adaptive fuzzy sliding mode control for PM synchronous servo motor drives[C]//IEEE Proc-Control Theory Apply,1998,145(1):63-72.
[11]Kim M,Song D.A robust control of permanent magnet synchronous motor using load Torque estimation[C]//IEEE Int Symposium on Industrial Electronics Pusan,Korea,2001.
[12]譚文,王耀南,黃創霞,等.永磁同步電機中混沌現象的滑模變結構控制[J].計算機工程與應用,2009,45(11):220-222.
[13]劉恒.永磁同步電機混沌系統光滑二階滑模控制[J].計算機工程與應用,2012,48(21):222-224.
[14]劉金琨.滑模變結構控制MATLAB仿真[M].北京:清華大學出版社,2005:4-51.
[15]童克文,張興.基于新型趨近律的永磁同步電機滑模變結構控制[J].中國電機工程學報,2008,28(21):102-106.
[16]王豐堯.滑模變結構控制[M].北京:機械工業出版社,1998:31-50.
GAO Fengyang1,QIN Chao2,ZHUANG Shengxian3,DONG Weiguang1
1.School of Automation and Electrical Engineering,Lanzhou Jiaotong University,Lanzhou 730070,China
2.Science and Technology Research Institute of Shenyang Railway Administration,Shenyang 110013,China
3.School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031,China
The sliding gain choice directly influence the robustness of the sliding mode control result of chattering.By using position signal error,sliding mode surface integral and sliding gain the non-linear relationship among this novel,present the design method of sliding gain.Combining the position control is a novel design method of the equivalent control method to improve the robustness of sliding mode control,weaken the sliding mode variable structure of chattering.In addition, the sliding line is extended to a control method of PI and sliding mode control effect in different stages in PMSM’s servo system.The application of Matlab/Simulink established permanent magnet synchronous motor servo system simulation model.The simulation results show that this scheme is with strong robustness,good static,dynamic characteristics and significantly decreasing buffeting.
position servo;sliding mode control;permanent magnet synchronous motor;vector control;chattering
滑模增益的選擇直接影響系統抖振,利用位置信號誤差、滑模面積分與滑模增益之間的非線性關系來設計滑模增益,再結合等效控制方法來削弱滑模抖振改善系統的魯棒性。將單段滑模線控制擴展成在不同階段PI與滑模分別起作用的兩段控制方法應用于永磁同步電機位置控制。應用Matlab/Simulink建立了永磁同步電動機伺服系統的仿真模型,仿真結果表明該方案對系統參數不確定、外界擾動具有強魯棒性。系統動靜態品質優良,滑模控制的抖振得到明顯抑制。
位置伺服;滑模變結構控制;永磁同步電機;矢量控制;抖振
A
TM351
10.3778/j.issn.1002-8331.1402-0300
GAO Fengyang,QIN Chao,ZHUANG Shengxian,et al.Sliding mode variable structure control of PMSM based on novel exponential rate reaching law.Computer Engineering and Applications,2014,50(22):238-242.
甘肅省科技支撐計劃資助項目(No.1204GKCA038)。
高鋒陽(1971—),男,教授,碩士研究生導師,主要研究領域為大功率電源及交流調速技術;秦超(1988—),男,碩士研究生,主要研究領域為電力電子與電力傳動;莊圣賢(1964—),男,教授,博士研究生導師,主要研究領域為交流技術及傳動控制;董唯光(1971—),男,副教授,碩士研究生導師,主要研究領域為非線性系統控制。E-mail:18298379518qinshihuang1988@126.com
2014-02-25
2014-05-19
1002-8331(2014)22-0238-05
CNKI網絡優先出版:2014-06-18,http://www.cnki.net/kcms/doi/10.3778/j.issn.1002-8331.1402-0300.html
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32