基于第一扇區坐標分量的SVPWM快速算法
2014-08-02 10:30:36董興發
化工自動化及儀表 2014年1期
榮 飛 董興發
(1.山西同煤集團煤峪口礦,山西 大同 037000; 2.太原理工大學機械工程學院,太原 030000)
空間矢量脈寬調制(Space Vector Pulse Width Modulation,SVPWM)技術是一種比SPWM技術更為先進的、計算機可高度介入的脈沖寬度調制(Pulse Width Modulation,PWM)方法。它具有諧波含量少、開關損耗小和直流電壓利用率高的優點,且磁鏈軌跡更逼近圓形,轉矩平穩,因此得到了日益廣泛的應用[1]。傳統的SVPWM算法涉及到大量的運算,主要是三角函數運算和矩陣運算,這大大增加了控制器的負擔和程序占用的存儲空間[2]。
筆者提出了一種新型的SVPWM快速算法,該算法能根據參考矢量的坐標分量迅速判斷出參考矢量所在的扇區,且僅需根據坐標分量計算出第一扇區的時間,即可求出其他相關矢量的作用時間,易于數字化應用,具有很好的實用性。
1 SVPWM快速算法①
1.1 扇區判斷
兩電平在三坐標軸坐標系空間中的矢量圖如圖1所示,圖中的扇區號經過了順序調整,該操作的仿真模塊如圖2所示。

圖1 兩電平三坐標軸坐標系中的矢量圖
Ux,Uy,Uz——參考矢量在坐標系的分量;
V1~V6——兩電平空間矢量圖的基本向量;
Vref——參考矢量
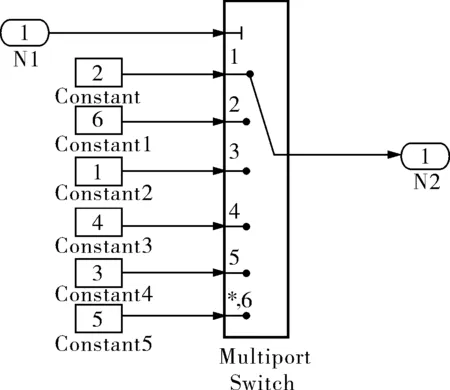
圖2 扇區調整仿真模塊
如圖1所示,在兩電平電壓空間矢量圖中建立一個與所有扇區嚴格坐標系,其中3個坐標軸x,y,z分別位于扇區Ⅰ,Ⅱ,Ⅲ的角平分線上。設參考矢量在坐標系的分量分別為Ux,Uy,Uz[3],即:
(1)
若Uz>0,則扇區可能為Ⅱ,Ⅲ,Ⅳ;Uy<0,則扇區可能為Ⅳ,Ⅴ,Ⅵ,因此若Uz>0且Uy<0,則參考矢量所在的扇區為Ⅳ,于是得出參考矢量所在扇區的判斷關系見表1[4]。
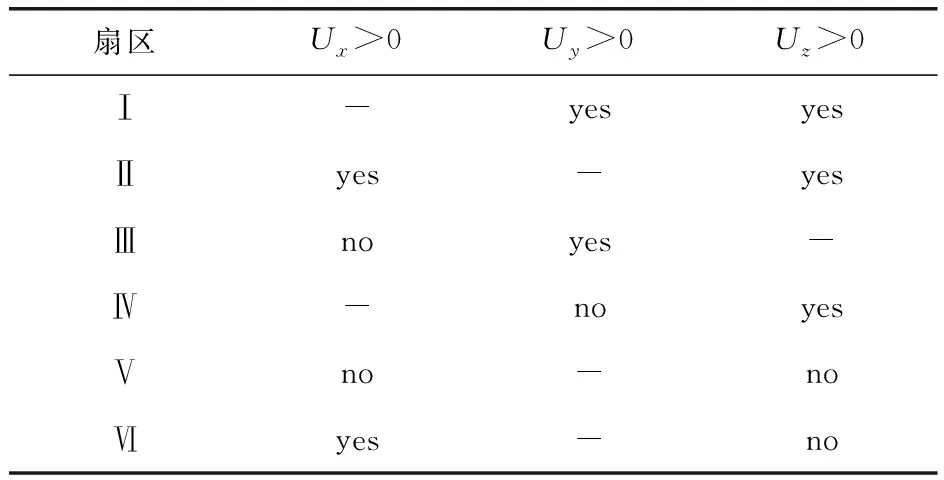
表1 扇區判斷關系表
1.2 相關矢量作用時間計算
相關矢量作用時間的計算依據的是矢量的平行四邊形定則,因此若合成兩個不同參考矢量的平行四邊形是全等的,則它們的相關矢量作用時間要么相同要么順序相反。
如圖3所示,若參考矢量Vref在第二扇區與第一扇區內的模長相等,且第二扇區的參考矢量經角度變換轉化到第一扇區后,與α軸正向的夾角與第一扇區的參考矢量和與α軸正向夾角相等。則這兩個平行四邊形是全等的。圖3中,T11、T12、T21、T22為與參考矢量相關的基本矢量的作用時間,于是得T11=T22,T12=T21。當參考矢量位于第三扇區時,同理可得其作用時間與第一扇區作用時間的對應關系為T31=T11,T32=T12。這樣就可以用第一扇區的時間來代替其他扇區的時間。

圖3 扇區Ⅱ,Ⅰ作用時間關系
設Vref位于第一扇區,由傳統的SVPWM算法可得矢量的作用時間為[5]:
(2)
與式(1)相比較得:
(3)

得到的各扇區的矢量作用時間見表2。

表2 各扇區矢量作用時間
于是將參考矢量旋轉到第一扇區后,就可以用式(3)來求所有扇區相關矢量的作用時間了,參考矢量轉化公式為:
theta=θ-π(N-1)/3
(4)
式中N——扇區數;
θ——參考矢量與α軸正方向的夾角[6]。
2 仿真驗證
在Simulink中建立了該算法和傳統算法的仿真模型。直流電壓設為600V,仿真時間為0.7s,異步電動機參數設置為:額定功率4kW,線電壓有效值400V,頻率50Hz,二對極RS=1.405Ω,LS=0.005 839H,Rr=1.395Ω,Lr=0.005 839H,Lm=0.172 2H,轉動慣量為0.013 1kg·m2,機械負載轉矩為30N·m。圖4、5分別為逆變器在該算法下輸出的相電壓波形圖和線電壓波形圖(橫軸單位為s,縱軸單位為V),由輸出波形可知該算法是正確的。圖6為電機轉矩曲線,圖7為電機轉速曲線,由電機輸出的曲線可知,該算法有較好的穩定性。

圖4 相電壓波形

圖6 電機轉矩曲線
3 結束語
筆者提出了一種基于第一扇區坐標分量的SVPWM算法,簡化了扇區判斷及相關矢量作用時間的計算量,提高了系統的實時性,系統達到穩態后,運行平穩,且該方法具有很好的實用性。

圖7 電機轉速曲線
