k-means聚類算法在油水界面檢測中的應用
2014-08-02 10:30:36劉遠紅習玉陽吳華遠鄭敏紅李艷平
化工自動化及儀表 2014年1期
劉遠紅 習玉陽 吳華遠 鄭敏紅 李艷平
(1.東北石油大學電氣信息工程學院,黑龍江 大慶 163318;2.大慶鉆探集團鉆井一公司,黑龍江 大慶 163453;3.中國石油撫順石化公司,遼寧 撫順 113000;4.大慶油田水文地質公司,黑龍江 大慶 163453)
原油儲罐內油水界面高度是保證油水分離正常運行的重要參數。因此,快速準確地檢測出油水界面是確定出水量、出油量的關鍵,同時這個參數也為了解油井產量及油井壽命等提供可靠的依據。油水分離技術是一個很復雜的過程,通常是在油水混合物中加入一定量的化學藥劑,并將其在原油沉降罐中進行自然沉淀,由于油、水的密度不同,分離后在沉降罐底部一般為純度較高的水,中部為油水乳化液,上部通常為油。但是由于油和水在沉降罐中形成不同形態的油水乳化液,在界面處形成一個乳化帶,乳化帶的狀態是一個復雜的隨機變化過程,乳化帶中礦物質的含量、界面的彈性及壓力等參數都會影響該過渡帶的穩定性,因此,油水界面檢測難度較大[1,2],通常采用測量溶液電容值的變化,并依據工人的經驗對油水界面的位置和乳化帶的寬度進行大致估計。
國內外油水界面測量儀根據測量方式的不同,可分為接觸式和非接觸式兩種,接觸式常用的檢測方法有電容法、浮球法及差壓法等,非接觸式則有超聲波、射頻導納、短波吸收及射線法等。接觸式與非接觸式檢測方法各有自己的優缺點。接觸式檢測由于直接與被測物接觸,因此一般精度較高,但當被測物具有酸堿等腐蝕性時,長時間使用必然會對傳感器產生損傷,影響傳感器的使用壽命;非接觸式測量精度一般較接觸式低,但由于其不與被測物接觸,因此使用壽命相對較長。目前油水界面檢測儀研究的主要方向大都集中在傳感器等硬件的改進上[3,4],而對采集后的信號分析和處理研究較少,并且由于復雜的現場環境、油水乳化液本身狀態變化的隨機性及非平穩性等因素的影響,傳統上僅依據計算各層混合液導電率的拐點來判斷油水分界面,精度較低并且穩定性較差。為此,筆者以電容式傳感器檢測到的數據為基礎,對采集到的數據進行濾波處理,并采用三次樣條插值方法增加原始數據的點數,以提高數據的精度,由于油層、乳化層和水層的數據分別具有比較明顯的時域特征,因此最后利用k-means聚類算法辨識出油水界面和乳化寬度。
1 油水界面檢測系統①
通過測量油水混合液電容值的方法,定位油水界面是油田常用的檢測方法之一。沉降罐中的界面檢測系統如圖1所示,罐內由上到下分別為油層、乳化帶和水層。
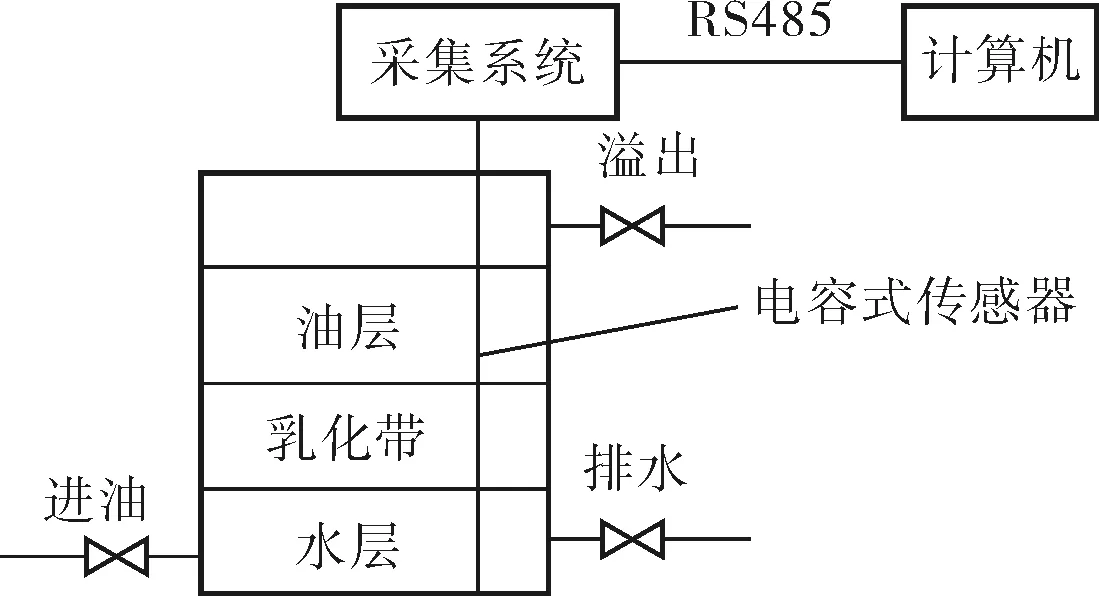
圖1 沉降罐中油水界面檢測系統示意圖
電容式傳感器直立在原油沉降罐中,由于制作工藝和安裝的限制檢測點并不是連續的,通常是每隔20cm安裝一個檢測點,標準沉降罐高度為3.2m,共16個檢測點,采集系統負責將采集到的電容值信號通過RS485協議送入計算機,計算機對數據進行計算分析,以確定油水的界面和乳化帶的寬度。
2 油水導電率數據處理
2.1 三次樣條插值
檢測油水混合液電容值的傳感器直立在沉降罐中,受制作工藝的限制混合導電率的測量并不是連續的而是每隔一段距離安裝一個電容,通常一個標準的沉降罐中的檢測點數為16個,數據點數過少,導致在兩個測量點之間的混合液的導電率完全未知,測量精度不高,因此,筆者提出通過在檢測點中進行插值,預測出未檢測處液體的電容值,以提高最終確定油水界面位置及乳化帶寬度的精度。插值[5]與擬合[6]的主要區別在于,插值函數需要完全通過已知點,而擬合則不需要。在確認所采集到的點精確的前提下,通常采用插值法,最常用的插值函數為多項式函數,插值函數的次數越高其精度也越高,同時兼顧精度與計算的復雜度,筆者采用三次多項式進行插值。
設在每個小區間[xi,xi+1]上可以寫成:
s(x)=aix3+bix2+cix+di,i=0,1,2,…,n-1
(1)
其中ai、bi、ci、di為待定系數,可通過以下方程求解:
(2)
這樣就得到光滑三次樣條曲線,由此即可得到整個沉降罐中任意點的液體導電率數值。
2.2 k-means聚類算法
在分離油水混合液的過程中,混合液本身所含的礦質、加藥量和沉淀時間的不同,在沉降罐中的混合液,甚至是分離出來的純油或純水的導電率是沒有一個統一基準的,因此無法采用絕對值的方法來確定沉降罐中的油水界面和乳化寬度,但在正常情況下,沉降罐中從底部到頂部混合液電容值的變化是單調的,符合一定變化規律,時域特征比較明顯,因此可通過采用k-means聚類算法將純油、乳化帶和純水的位置辨識出來[7]。
k-means聚類算法屬于一種無監督聚類,以歐式距離作為相似測度,它是求對應某一初始聚類中心向量最優分類,使用評價指標誤差平方和準則函數作為聚類準則函數。算法的最大優勢在于簡潔和快速。算法的關鍵在于初始中心的選擇和距離公式。k-means聚類算法步驟描述如下:
a. 對于數據對象集,任意選取k個對象作為初始的類中心,通常可選擇某個鄰域數據的平均值作為類中心;
b. 根據類中對象的平均值,對任意一個樣本,求其到c個中心的距離,將該樣本歸到距離最短的中心所在的類;
c. 更新類的平均值,即計算每個類中對象的平均值;
d. 重復步驟b、c;
e. 直到平均值不再發生變化。
3 實驗仿真
為了驗證筆者所提油水界面檢測方法的有效性,選取現場沉降罐中的實際數據。沉降罐高3.2m,每隔20cm安裝一個油水混合液導電率檢測點,共計16個檢測點,表1為對沉降罐中的油水混合液進行采樣得到的一組數據,其中電容值在500F以下的為油,1 500F以上的為水,500~1 500F的為乳化層。
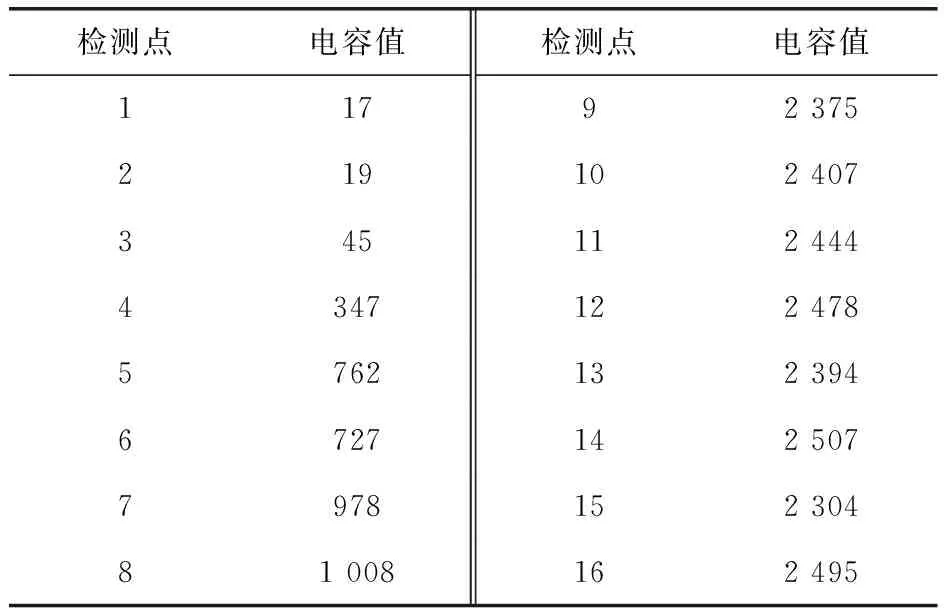
表1 現場實際數據 F
以Matlab作為處理工具,采用interp1插值函數對信號進行128點插值,插值前、后數據曲線分別如圖2、3所示。從圖2中可以看出,由于安裝的檢測點數過少導致采集到的數據過于稀疏,兩檢測點的數據無法獲知,在計算過程中單個點的變化對最終結果影響較大;從圖3中可以看出,當對數據插值后,數據點數增加,單點的變化對最終結果影響較小,提高了油水界面的定位精度。
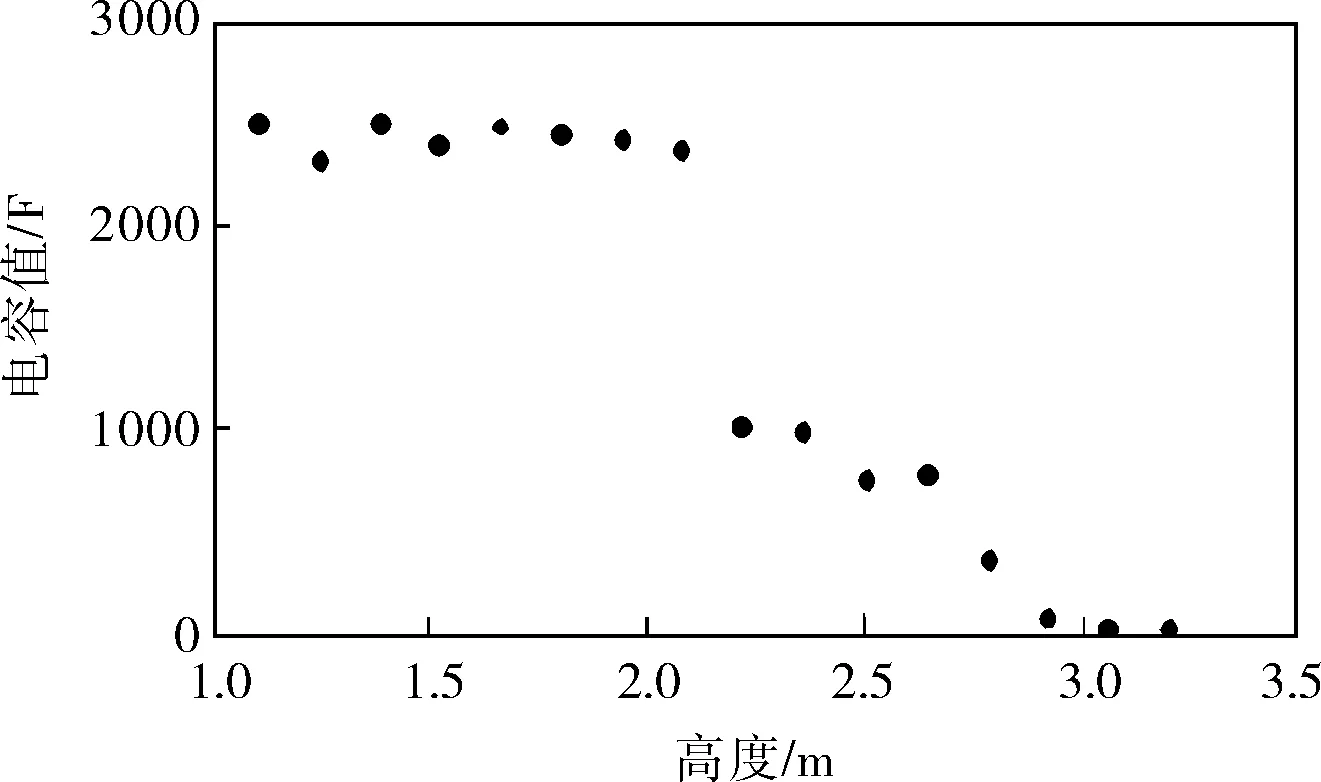
圖2 插值前電容值
對油水混合液電容值曲線分別利用計算拐點和k-means聚類算法,確定油水界面的位置和乳化帶寬度,仿真結果如圖4、5所示。
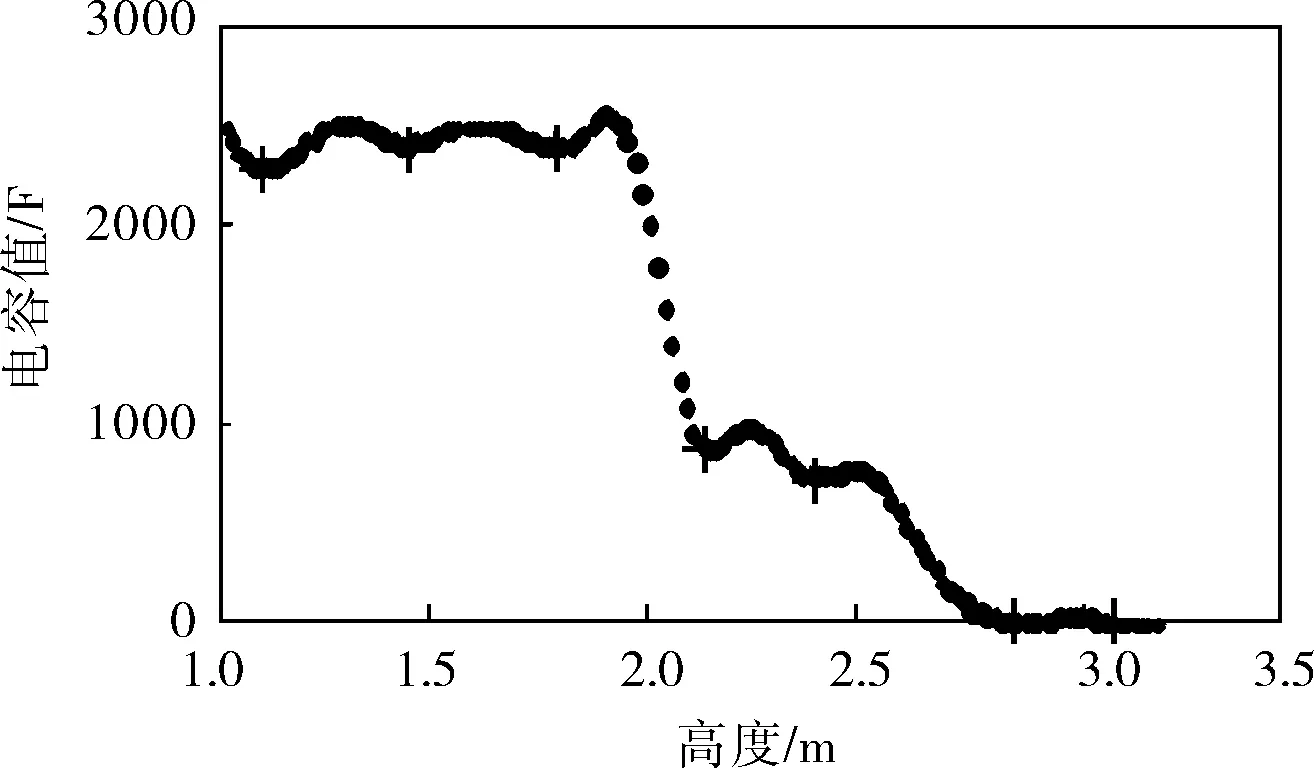
圖4 拐點法定位油水界面
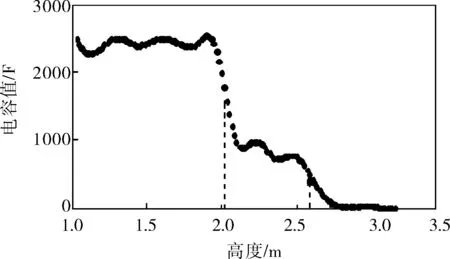
圖5 k-means聚類定位油水界面
圖4中*為曲線的拐點,取相鄰兩點差值最大的拐點作為油水界面,兩拐點間為乳化層,使用該方法時當數據稍有波動就會產生較大的誤差,容易將曲線的局部凹凸波動誤認為曲線的拐點,而導致錯誤的定位,因此魯棒性較差,并且該方法只是通過尋找相鄰兩拐點的最大差值來定位界面,保守性較強導致精度較低。而筆者所提出的k-means聚類算法,避免了拐點的計算,能夠準確定位出油水界面的位置和乳化帶的寬度,仿真結果顯示最后的定位結果不會因個別數值小范圍的波動而受到影響,具有良好的魯棒性,并且由于筆者對采樣數據進行插值,幾個點的誤差并不會對最終結果有太大的影響。
4 結束語
以傳統的電容式傳感器采集到的油水混合物電容值數據為基礎,采用三次插值法對其進行插值,以增加數據的密度提高精度,并利用k-means聚類法對數據進行聚類分析,識別出油水界面,避免了傳統拐點法的偽拐點現象以及過于保守性的影響,提高了檢測系統的魯棒性和實用性,并在實際應用中進行了驗證。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年13期)2020-08-24 08:22:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
金秋(2017年4期)2017-06-07 08:22:16
中國材料進展(2016年10期)2016-12-26 06:50:20
濰坊學院學報(2016年2期)2016-12-01 13:00:11
