腹腔鏡外科手術機器人發展概況綜述
2014-07-31 23:11:10王偉王偉東閆志遠杜志江何史林陳廣飛周丹
中國醫療設備 2014年8期
王偉,王偉東,閆志遠,杜志江,何史林,陳廣飛,周丹
1.哈爾濱工業大學機器人技術與系統國家重點實驗室,黑龍江哈爾濱 150080;2.中國人民解放軍總醫院,北京 100853
腹腔鏡外科手術機器人發展概況綜述
王偉1,王偉東1,閆志遠1,杜志江1,何史林2,陳廣飛2,周丹2
1.哈爾濱工業大學機器人技術與系統國家重點實驗室,黑龍江哈爾濱 150080;2.中國人民解放軍總醫院,北京 100853
專欄——微創腹腔外科手術機器人系統研究
編者按:2013年7月25日,由中國人民解放軍總醫院牽頭,哈爾濱工業大學、天津大學和南開大學等多家單位共同承擔的國家“863”計劃“微創腹腔外科手術機器人系統研究”重點項目在中國人民解放軍總醫院通過了由科技部高技術中心組織的驗收。
項目建立了具有我國自主知識產權的實用型微創腹腔外科手術機器人及醫生培訓系統。手術機器人系統由手術機械臂、手術微器械、醫生控制臺、3D腹腔鏡等組成。項目完成了15例活體動物(豬)腎切除和15例活體動物(豬)膽囊切除實驗,完成了臨床標本實驗,實現了術中機械臂切換、器械快換、工作空間切換、術野變換、主從比例切換、電凝等操作,驗證了機器人在腹腔內可達工作空間能夠滿足手術的位置要求,實現了膽囊的夾取、牽拉、膽囊床的剝離和膽管離斷,以及腎動靜脈的結扎、離斷,腎周組織分離、輸尿管離斷等操作,實驗動物(豬)術后恢復良好。實驗表明系統實現了分離、切割、止血、縫合等腹腔鏡外科手術基本操作,可以完成腎切除、膽囊切除等典型術式。項目授權和受理國家發明專利8項,發表和錄用論文22篇,培養了博士和碩士研究生21人,達到了項目指標要求。
該系統采用模塊化設計思想,可以實現機械臂系統的不同功能組合,并具有互換性;設計并實現了手術機械臂的零力拖曳功能,方便術前和術中柔順擺位;建立了具有3D視覺和力覺反饋的主從遙操作系統,3D腹腔鏡系統具有避免調節雙路圖像相對位置、體積小、重量輕的優點;研制出適應手術需求全自由度手術微器械,既滿足了操作的靈活性要求,又可以實現快速更換。系統適合中國國情,成本相對較低,便于普及推廣。
該項目是“十一五”期間“863”計劃在先進制造技術領域的重點項目,項目研制成功對促進我國高端微創手術機器人技術的進步,提高國產微創腹腔鏡手術機器人的產品成熟度,提升我國醫療機器人的研發水平,推動我國醫療機器人產業的發展具有深遠意義。
本期特別邀請中國人民解放軍總醫院醫務部副主任,解放軍醫學院教務長,軍醫進修學院碩士生導師周丹博士擔任欄目主編,就此項目的相關研究進展作專題討論。

欄目主編:周丹
周丹,博士、高級工程師,現任中國人民解放軍總醫院醫務部副主任、解放軍醫學院教務長,解放軍醫學院碩士生導師,軍醫進修學院碩士生導師。北京理工大學管理學碩士,美國南加州大學職業技術學院工商管理博士 (DBA)學位,國際認證臨床工程師(CCE),獲第六屆美國臨床工程學會安東尼奧國際臨床工程獎。國內外主要社會兼職包括:中華醫學會醫學工程學分會前主任委員;中國醫學裝備協會急救醫學裝備專業委員會主任委員;中國醫學裝備協會常務理事、副秘書長;軍隊第九屆科委會醫學工程學專業委員會副主任委員;軍隊第九屆科委會醫學工程學專業委員會臨床工程分會主任委員;全軍醫學計量科學技術委員會副秘書長;全軍熱力學計量總站站長;國際生物醫學工程學會(IFBME)CED 理事 ;中國醫師協會臨床工程師分會會長。
近年來,微創外科手術以其優異的醫療效果,逐漸被人們接受。將微創外科手術技術與機器人技術結合,彌補了傳統微創外科手術存在的不足,加速了微創外科手術的進化。腹腔鏡外科手術機器人技術已成為當前機器人領域的研究熱點。本文詳細地介紹了國內外腹腔鏡外科手術機器人及應用現狀,并討論了相關技術難點和未來的發展方向。
微創手術; 醫療機器人; RCM機構
0 前言
自 1987 年法國里昂的 Mouret醫生在一位婦女身上成功完成了世界上第一例電視腹腔鏡膽囊切除術起,微創手術技術步入一個前所未有的飛速發展時代[1]。相對于傳統的開放性手術,微創手術能夠降低手術感染風險及并發癥發生幾率,具有手術創傷小、痛感輕、術中出血量少及病人術后恢復快等優點,因而在外科手術領域得到了廣泛的認可并深受患者青睞。然而普通的腹腔鏡微創外科手術也存在諸如:由于器械在體表開孔處的制約而產生杠桿效應,導致醫生手眼不能協調,缺乏三維視覺信息和力感,長時間操作器械易產生疲勞,手部抖動會被放大至器械末端等不足。機器人技術是傳統結構學與近現代電子技術相結合的當代高新技術。將機器人技術融入微創外科手術之中,使之能更好地輔助醫生實施高質量手術已成為當前醫學、機械、自動化、通信以及計算機等領域的研究熱點。腹腔鏡外科手術機器人具有操作精度高,靈活性強,重復性好以及不受疲勞和情緒等人體生理因素影響等優點,對于解決傳統微創手術所面臨的問題,提高手術質量及縮短手術時間都具有重要意義,有效拓展了醫生的手術能力,同時也為微創外科手術提供了新的平臺。
國內外的科研機構和高新技術企業已經成功研制了多種醫療輔助機器人,如已被美國食品及藥物管理局(FDA)認可的 Aesop 系列手術機器人,Zeus遙操作外科手術系統以及 Da Vinci外科手術機器人系統等。其中 Da Vinci外科手術機器人系統已在泌尿科、婦科、心臟手術、腹腔手術等微創手術中獲得巨大成功[2-4]。本文詳細地介紹了國內外腹腔鏡外科手術機器人及應用現狀,并討論了相關技術難點和未來的發展方向。
1 腹腔鏡微創手術機器人的國外研究與應用現狀
近年來,西方發達國家推出越來越多市場化的醫療機器人產品。美國、歐盟、日本等國家都已開展專門立項投資,積極進行醫療輔助機器人的研究。目前,在醫療外科手術規劃模擬、微創外科手術輔助操作、無損傷診斷與檢測、康復護理、功能輔助等方面得到了廣泛應用。除此之外醫療機器人在戰創傷救治方面也有著良好的應用前景,受到軍方的廣泛重視。美國國防部高等研究計劃局為美國陸軍未來戰場傷病員救援和醫療設計了高度集成化、機器人化和智能化的醫療系統。歐共體技術專家 Maurice 在 IEEE SPECTRUM 期刊中表示,歐盟也將機器人輔助外科手術及虛擬醫療技術仿真作為重點研究發展計劃之一[5]。自 20 世紀 90 年代起,國際先進機器人計劃(IARP)已召開過多屆醫療外科機器人研討會,將機器人與計算機輔助外科單獨列為一個專題。
1.1 SRI醫療機器人系統
1990 年,斯坦福研究所(SRI)研制出 SRI醫療機器人系統樣機。1995 年,新成立的直覺外科研究所應用 SRI、IBM 和 MIT 開發的技術,研制出 1 cm 開口的復雜修復手術用遙控多自由度機器人手臂和工具,同時開發了專利產品三維立體視覺攝像機和立體檢測儀。該系統具有先進的視覺和力反饋系統,使醫生能夠在視覺和觸覺環境中進行手術操作。SRI醫療機器人由 4 自由度的腕部器械和 3 自由度的機器人臂組成。系統由冗余傳感器和多極安全檢測系統保證安全,可以實現自動關機和報警。1997 年,由比利時醫生用此機器人設備進行了首次臨床手術。
1.2 AESOP系列外科手術機器人
1994 年, 美 國 Computer motion 公 司 研 發 出 首 個獲得 FDA 認證并用于實際臨床外科手術的機器人系統AESOP1000[6], 見 圖 1(a)。 該 系 統 通 過 一 條 具 有 6 個 自由度的機械手臂來代替護士調整腹腔鏡腔內位姿,以獲得穩定的腔內手術場景圖像。1996 年,該公司又研制出AESOP2000[7],見圖 1(b)。初步實現了機械臂的語音識別操作。在此基礎上,2003 年,在 AESOP2000 的基礎上又對語音識別系統進行了改進,成功研發了 AESOP3000[8],見圖 1(c),醫生可通過聲音實現對機器臂的控制。AESOP 系列外科手術機器人持鏡系統的應用,為微創手術提供了穩定腔內圖像信息,降低了術中醫護人員的工作強度,醫生可根據手術需要自行調整腔內持鏡臂位姿,提高了微創手術操作的靈活性和準確性。
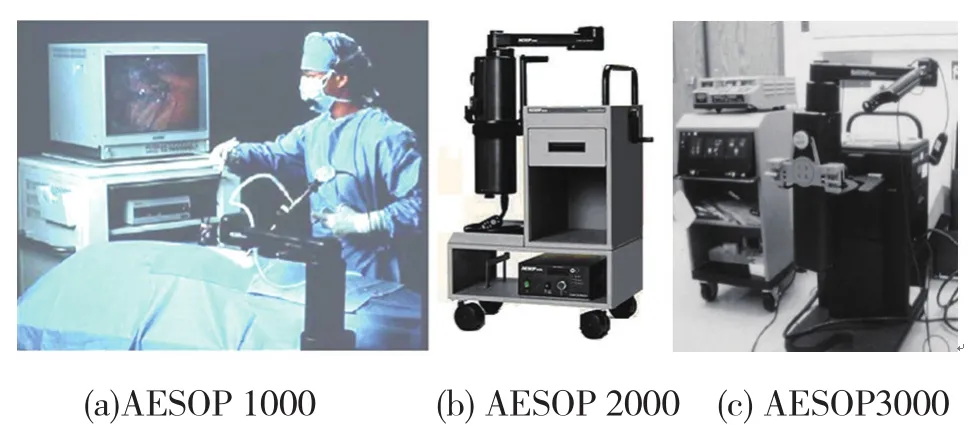
圖1 AESOP系列外科手術機器人持鏡系統
1.3 ZEUS外科手術機器人
在 AESOP 系 列 外 科 手 術 機 器 人 系 統 的 基 礎 上,Computer Motion 公司推出了具備更高手術精度的外科手術機器人系統 ZEUS[9],見圖 2(a)。該系統包括主操作控制臺和機械臂執行機構,見圖 2(b)~(c)兩部分。機械臂執行系統由1條機械持鏡臂和2條7自由度的手術器械臂組成,其中6個自由度用于姿態調整,另外1個用于位置優化,在控制姿態的6個自由度中,4個由電機驅動,其余為無動力驅動的隨動關節。3條機械臂均集成在手術床上,便于實現不同機械臂間的統一標定。醫生通過主操作控制臺的主手即可控制機械臂系統進行手術操作。
ZEUS系統作為第一代真正意義上的主從遙操作外科機器人系統[10],通過多例動物及人體的膽囊切除實驗驗證了超遠程手術的可行性,其中包括著名的“林白手術”。整個手術中機器人準備時間為 16 min,手術過程 54 min,操作延遲為 155 ms,術后病人平靜且無并發癥產生,病人于 48 h 后出院[11]。ZEUS 系統的主要貢獻在于消除醫生操作時手部的抖動,使微創手術操作更加精確穩定。它已經成功應用于心臟瓣膜修復術、全動脈化冠狀動脈旁路移植等具有極高要求的精密手術之中。2003 年,Intuitive Surgical公司和 Computer Motion 公司合并后,Zeus 系統不再生產。

(a) ZEUS手術機器人系統 (b) 主操作控制臺 (c) 機械臂執行機構圖2 ZEUS外科手術機器人系統
1.4 Da Vinci微創外科手術機器人
2001 年,美國 Intuitive Surgical 公司研制出了新一代的微創外科機器人系統——Da Vinci外科手術機器人系統[12],并獲得 FDA 認證,該系統由醫生主控平臺、手術機械臂及圖像處理設備 3 部分組成(圖 3)。手術機械臂包含 3 條器械臂和1條持鏡臂,每條臂都由一系列術前被動調整關節及主動運動關節組成。4條機械臂都具有7個自由度,其中4個被動自由度用于術前擺位,3個主動自由度用于術中的手術操作。器械臂用來安裝手術微器械并配合手術微器械實施手術操作。持鏡臂用于術中調整內窺鏡位置,以獲得清晰穩定的腔內圖像信息。系統的全部機械臂都集成在一個移動平臺上,這種系統集成方式使結構更加緊湊、靈活,便于移動。醫生主控平臺中集成了主操作手和高清的三維立體視覺顯示系統,通過主控平臺的腳踏開關可實現器械臂和持鏡臂之間的控制切換。醫生可通過主操作手實現對手術微器械及內窺鏡的直覺運動控制。

圖3 Da Vinci外科手術機器人系統
Da Vinci外科手術機器人系統是目前全球范圍內最成功的臨床外科手術機器人系統。它可以為醫生提供如同傳統開放性手術般的直觀運動控制、運動范圍和組織處理能力,同時具備濾除術中醫生手部生理抖動的能力。憑借良好的操作環境與優異的控制性能,Da Vinci手術機器人已將許多難度大、復雜性高的手術引入到微創手術之中。當然 Da Vinci手術機器人系統也并不完美,由于機構龐大、沉重,手術過程中機械臂容易相互干涉,給調試與安裝帶來不便。成本昂貴維護費用高昂,也使得許多國家和地區的醫院難以承受。
目前,Da Vinci機器人系統已經在泌尿科、普通外科、心臟外科、婦產科等領域得到廣泛應用,獲得了良好的經濟效益應。截至 2012 年 12 月 31 日,已有 2132 臺 Da Vinci手術機器人系統在世界各地的醫療機構中應用。其中美國 1548 臺,歐洲 372 臺,其他國家 212 臺。2011 年 Da Vinci手術系統完成的手術約有 36 萬例,相比 2010 年增長了 29%。
1.5 單孔道微創外科手術機器人
2004 年美國 Johns Hopkins 大學研制出一種單孔道外科手術機器人 Snake-Like Robot[13](圖 4)。該系統也采用主從控制模式,主操作手與 Da Vinci機器人系統相同。從手執行端為固定在4自由度的平行機構上的具有7自由度的多關節蛇形機構,采用多根高彈性管作為柔性脊柱,以鋼絲繩驅動的方式來控制末端手爪實現 ±90°的偏擺和俯仰動作,手爪能夠產生約1N的夾持力。由于蛇形機器人的機構外徑僅為 4 mm,固該機器人可在狹小的手術空間內為醫生提供靈活的手術操作。目前該系統仍處于研究階段,尚未進入到實際臨床應用。

圖4 蛇形單孔手術機器人
2009 年, 美 國 Columbia University 研 制 出 了 與Snake-Like Robot形態相似的一種小型單孔雙臂蛇形手術 機 器 人[14](圖 5)。該機器人由一組雙目腔鏡攝像頭及兩個獨立的多自由度蛇形操作手組成,通過2自由度平行四邊形機構實現執行器末端的腔內位置調整,利用多自由度蛇形關節進行末端姿態調整。該手術機器人系統相對于Snake-Like Robot集成度更高,具備更高的靈活性與可操作性,目前也處在研究階段。

圖5 Columbia University開發的蛇形單孔手術機器人
1.6 RAVEN外科手術機器人系統
RAVEN 外科手術機器人系統(圖 6)是由美國華盛頓大學開發的新一代小型化主從遙操作外科手術機器人系統[15-16]。系統 2 兩條執行手術操作的器械臂及 1 條調整腹腔鏡姿態的持鏡臂組成,每條器械臂包含7個自由度,由5個旋轉關節、1個移動關節和1個夾持關節組成。系統具有結構緊湊、體積小巧、重量輕等特點。主手操作端和從臂執行器之間可通過網絡進行連接,實驗已證明該手術系統可以在極端的條件下通過多種網絡設置進行手術操作[17]。基于 Linux 的操作系統以及開源的操作軟件使各科研機構根據自己的需要在同一平臺上開發不同軟件控制系統成為可能。目前該系統已在多個研究機構中開展了動物試驗。

圖6 RAVEN外科手術機器人系統
1.7 歐洲各國研發的微創外科手術機器人系統
近年來,歐洲各發達國家對機器人輔助外科手術技術十分重視,各科研機構微創外科手術機器人也進行了廣泛深入的研究。波蘭羅茲理工大學在“波蘭心臟外科機器人項目”的支持下開發出類似于 Da Vinci系統的 Robin Heart系列微創外科手術機器人系統[18](圖 7)。該系列機器人操作臂機構較 Da Vinci系統簡單,微操作器械與 Da Vinci系統類似,靈活性與可操作性較 Da Vinci系統還存在差距,目前該系統尚未應用于臨床手術。

圖7 Robin Heart系列微創外科手術機器人
德國宇航中心(DLR)利用其在輕型臂研究方面的優勢,研發出具有可拓展性的 MiroSurge 機器人系統[19](圖 8)。該微創外科手術機器人系統由3條輕型機械臂及操作主手組成。機械臂系統的集成方式類似于 ZEUS均安裝于手術床上,便于多機械臂間的空間位姿標定。系統可通過機械臂關節處集成的力傳感器實時檢測關節處的力矩信息,以實現機械臂末端的平滑控制。系統同樣采用主從控制,該機器人系統的最大的特點在于每條輕型機械臂的7個關節均為主動驅動關節,機械臂系統通過自由度的冗余來實現腹壁切口處的定點運動。
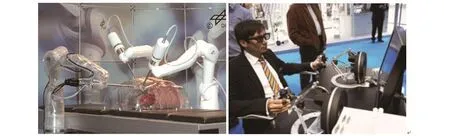
圖8 MiroSurge外科手術機器人系統
德國慕尼黑工業大學研制出一套具有4條機械臂的微創外科手術機器人系統[20](圖 9)。該系統將機械臂集成在手術床上方的手術室天花板上,極大地減少了手術床周圍的空間占用,便于醫護人員在術中進行手術干預。但是這種集成方式需要配備特殊的手術室,安裝相對較困難,靈活性和機動性都較差。特殊的安裝方式也使得術前消毒準備工作相對繁瑣。
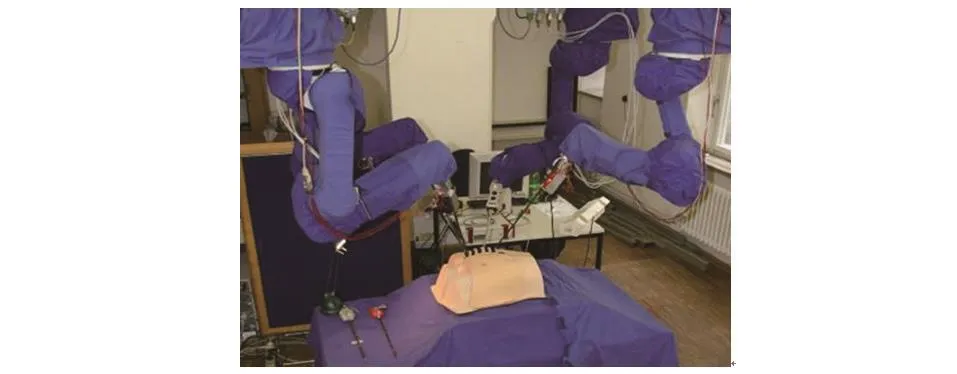
圖9 慕尼黑工業大學手術系統
2 腹腔鏡微創手術機器人的國內發展情況
近年來,我國已開始關注輔助外科手術醫療機器人設備的研究與開發,由于起步較晚,與歐美等發達國家的醫療機器人發展水平相比有較大差距,但在國家項目支持及市場需求的推動下發展迅速,一些高校及科研單位的研究機構已經研制出了一批不同用途的微創手術機器人系統。
2010 年,由天津大學、南開大學與天津醫科大學總醫院聯合研制了“妙手 A”腹腔微創手術機器人[21](圖 10)。與 Da Vinci類似,妙手 A 也采用主從控制方式。系統包括具備主操作手、機械臂系統、圖像處理系統及手術微器械。主操作手具備三維力反饋功能,可通過自身的機械結構實現重力平衡。采用雙路平面正交偏振影像分光法實現了手術空間內的立體視覺,從手操作臂通過一個6自由度被動調整鎖定機構來調整機器人術前的運動不動點初始位置。執行機構整體體積較 Da Vinci系統略小,系統具有較好的靈活性,目前已成功完成了多例動物的臨床實驗。

圖10 “妙手A”手術機器人系統
2013 年哈爾濱工業大學、南開大學與中國人民解放軍總醫院聯合研制了腹腔鏡外科手術機器人系統[22]。該系統由醫生控制臺、手術輔助系統及手術執行機構組成。執行機構包括器械臂、持鏡機械臂及手術微器械;醫生控制臺集成了用于醫生手部運動位姿采集的主操作手、視覺顯示系統以及整個機器人系統的功能控制面板;手術輔助系統主要包括3D成像設備、電凝和氣腹機等。每條從動機械臂都包含被動和主動關節兩部分,通過被動關節的調整可實現術前系統擺位。系統采用主從控制,根據手術需要配備多種形式的微器械,結合機械臂的主動運動關節可實現器械末端的腔內全維運動。經實驗證明,該套手術機器人系統能夠滿足組織抓取、縫合及打結等手術操作要求,具備良好的操作性和較大的操作空間,具有三維成像能力的高端內窺鏡可將圖像放大10倍以上,突破了人眼的觀察極限,極大地提高了手術的安全性和方便程度,為實現人手難以實現的高難操作創造了可能。
國內在單孔腹腔鏡手術機器人研究領域也取得了一些成果,如上海交通大學、哈爾濱工業大學等針對單孔微創手術機器人開展研究。這種機器人在具備不動點運動機構的基礎上,將末端手術微器械與內窺鏡進行一體化設計,通常手術微器械和內窺鏡可折疊收入到圓筒形結構之中,當進入人體腹腔后再展開手術器械進行手術操作,但這種類型的機器人仍處在研究階段,距臨床應用還比較遙遠。
除上述科研院所以外,針對腹腔微創外科手術機器人系統,南開大學、中科院沈陽自動化研究所、北京理工大學、深圳先進技術研究院等科研機構也在從事相關技術方面的研究。
3 腹腔鏡外科手術機器人的關鍵技術及發展方向分析
以目前較為成熟主從式腹腔鏡外科手術機器人系統為例,主要由從動機械臂系統、操作主手控制系統及3D視覺成像系統組成。從動機械臂系統主要包括器械臂、持鏡臂及各種手術微器械,是腹腔鏡外科手術的執行機構;操作主手控制系統主要用于醫生手部運動信息進行采集及手術系統的整體控制;3D視覺成像系統能夠使醫生獲得三維的手術現場視覺效果。腹腔鏡外科手術機器人的關鍵技術主要包括機構設計、運動控制策略及虛擬現實仿真的實現三個方面,對這些關鍵性的技術問題加以介紹和分析,對于新一代腹腔鏡外科手術機器人的研發設計具有積極意義。
在傳統的微創手術中,手術器械通過一個與人體皮膚切口處相連的 trocar卡進入體內。在進行微創手術時,trocar卡的軸線與皮膚平面的相交點對器械起到支撐的作用,醫生繞該不動點轉動手持器械對病人實施各種手術操作。為了將機器人應用到微創手術之中,必須保證輔助機器人在手術介入點處不會對病人造成額外的嚴重傷害,因此需要設計一種能夠提供空間位置不變點的機構,即遠心點運動機構,簡稱為 RCM (Remote Center-of-motion)機構,這一概念由 Taylor 于 1995 年首次提出[23]。
目前已提出的符合上述要求的微創手術機構主要分為多關節聯動、添加隨動關節及機構自身的限制約束三種方式實現手術器具在機械臂的操作下始終通過介入點切口。依靠機構自身結構約束實現的遠端不動點的方式目前已被科研人員廣泛采用。目前,常被用于微創外科手術機械臂中的 RCM機構主要有球面運動機構、圓弧導軌機構以及復合平行四邊形機構。此外,也有研究人員將這幾種機構進行改進優化后用于腹腔鏡外科手術機械臂的機構設計之中,如在上述球面機構的研究基礎上,研制出了雙連桿支撐的球面機構[24]以及將球面機構中的圓弧桿件以與圓弧弦線重合的直線桿件替代的改進型球面機構,如上文提到的RAVEN 外科手術機器人系統。遠心不動點的實現方式是腹腔鏡外科手術機器人設計的關鍵。在具備良好的自身實用性的前提下,未來的腹腔鏡外科手術機構設計應向結構更簡單、操控更靈活、體積更小巧、輕便的方向發展。
與傳統腹腔鏡微創手術一樣,腹腔鏡外科手術機器人系統也需要借助手術微器械來進行手術。由于微創手術切口對自由度的限制,腹腔鏡外科手術機械臂可為末端微器械提供3個自由度,手術微器械的自由度設計應保證在其手術空間內以任意位姿進行手術操作。本文介紹的各種腹腔鏡手術機器人,其相應的研究部門根據自身機構特點進行手術微器械的研發。對于不同種類的手術操作,設計專用的微器械,在結構和自由度數量上略有不同。研制適用于機器人系統的手術微器械,使之具備更高的靈活性與靈敏度,延長微器械的使用壽命,消除器械末端的耦合,集成良好的力反饋系統以及能夠根據手術需要實現微器械的快速拆裝和更換等技術問題將成為未來微器械的發展方向。
在使用腹腔鏡手術機器人進行手術之前,醫護人員需根據病灶位置和患者體型確定切口位置,對腹腔鏡手術機器人的操作臂術前擺放位置進行調整。合理的術前擺位能夠提高機械臂的靈巧度,增大可視空間與操作空間的交集區域,降低機械臂之間的相互干涉影響。由于醫護人員并不了解機器人學科的相關技術,僅靠經驗判斷很難給出適合手術的初始器械臂空間位姿,因此對于臨床應用的腹腔鏡外科手術機器人必須制定出一套快捷有效的術前擺位方案,以指導醫生更好更快地完成術前準備工作,為實施高質量手術奠定基礎。其核心問題就是如何通過優化遠心不動點的術前位置來獲取良好的機械臂運動性能指標,及多操作臂間較大的協作空間和較小的干涉影響。對于未來的腹腔鏡外科手術機器人系統來說,術前擺位規劃也是研究的主要方向之一。
受當前科技水平的限制,目前的腹腔鏡外科手術機器人并不具備單獨開展手術的能力。出于對手術安全和手術效果的考慮,術中需要醫生的實際參與。本文上述提及的腹腔鏡外科手術在機器人系統均通過主從空間映射的方法進行控制。主從控制性能的好壞對于手術質量起到決定性的作用。由于主操作手與從動機械臂的機構運動學模型差異,導致主從手運動空間不一致,對于這種典型的主從異構系統,需要在笛卡爾空間內對主從運動軌跡進行規劃[25-26],以實現從端系統對主端系統的運動軌跡跟蹤。在保證鏡下主從操作臂位姿一致性的前提下,應增強主從映射算法的實時性并對器械末端軌跡進行平滑規劃處理。在實際手術過程中,為增強對于不同手術或不同手術環節的適應性,主從運動控制比需要實時進行調整以適應不同精度的手術操作,使控制系統更穩定,手術操作更有效率。從手術操作的安全性方面考慮,應對腹腔鏡手術機器人的運動范圍加以限定并增加濾除醫生手部生理抖動的控制算法。在手術過程中由于比例控制的限制,當遇到主手已達到運動空間極限或主手之間發生干涉而從操作臂仍未到達目標區域的情況時,需暫時中斷系統當前的主從映射關系,調整便于繼續操作的主手姿態和位置后,根據當前的主手位姿信息重新建立主從映射關系。上述問題能否得到完美解決對于建立良好的主從控制關系至關重要。
4 結論
從傳統的開放性手術到微創外科手術產生,乃至如今的機器人輔助微創外科手術機器人的商品化進程,醫療手術器具始終處在不斷的演變與進化之中。未來的微創手術機器人會有更小的機構體積,更少的手術創傷,更優異的操控性能與更高的安全性和穩定性,輔助醫生或代替醫生更有效率、更精確地完成手術。高新的機器人技術在醫療領域的應用會形成一個新的產業。相信在不久的將來醫療外科機器人系統一定能夠得到蓬勃發展。
[1] 呂平,劉芳,戚昭恩.腹腔鏡外科百年發展史[J].中華醫史雜志,2001,31(4):218.
[2] Murphy D,Bhallacombe B Khan M S et al. Robotic technology in Urology[J]. Postgrad.Med.J,2006,82:743-747.
[3] Murphy D A,Miller J S,Langford D A.Endoscopic robotic mitral valve surgery[J].J ThoracCardiovascSurg,2007,133(4):1119-1120.
[4] Morgan J A,Thornton B A,Peacock J C,et al.Does robotic technology make minimally invasive cardiac surgery too expensive?A hospital cost analysis of robotic and conventional techniques.[J].J Card Surg,2005,20(3):246-251.
[5] 杜志江,孫立寧,富歷新.機器人輔助醫療技術的新進展[J].高技術通訊,2003:106-110.
[6] Mettler L.Ibrahim M,JONAR W.One year of Wxperience Working with The Aid of A Robotic Assistant in GYNAECOLOGICAL Endoscopic Surgery [J].Hum Reprod, 1998,13:2748.
[7] Kraft B M,J ger C,Kraft K,et al.The AESOP robot system in laparoscopic surgery:increased risk or advantage for surgeon and patient[J].Surgical Endoscopy,2004,18:1216-1223.
[8] Shew S B,Ostlie D J,Iii G W H.Robotic telescopic assistance in pediatric laparoscopic surgery[J].Pediatric Endosurgery& Innovative Techniques,2003,7(4):371-376.
[9] Marescaux J,Rubino F.The Zeus robotic system: experimental and clinical application[J].SurgClin N Am,2003,83:1305-1315.
[10] Butner S E,Ghodoussi M.A Real-Time System for Tele-Srugery[A].Proceedings 21stInternational Conference on Distributed Computing Systems[C].2001:236.
[11] Marescaus J,Leroy J,Gagner M,et al.Transatlantic robot-assisted telesurgery-ATM technology now enables operations to be performed over huge distances[J].Nature,2001,413:379-380.
[12] Miyamoto S,Sugiura M,Watanabe S,et al.Development of minimally invasive surgery systems[J].Hitachi Review,2003, 52(4):189-195.
[13] Simaan N,Taylor R H,Flint P.A Dexterous System for Laryngeal Surgery[A].Proceedings of the 2004 IEEE International Conference on Robotics & Automation[C].New Orieans,USA,2004:351-357.
[14] Jienan Ding,Kai Xu,Roger Goldman,et al.Design,simulation and evaluation of kinematic alternatives for insertable robotic effectors platforms in single port access surgery[A].2010 IEEE International Conference on Robotics and Automation[C].Alaska,USA,2010:1053-1058.
[15] M Lum,D C W.Friedman,G.Sankaranarayanan,et al.The raven-a multidisciplinary approach to developing a telesurgery system[J].International Journal of Robotic Research.Special Issue:Medical Robotics Part I,2009,28(9):1183-1197.
[16] J Rosen,M Lum,M Sinanan,et al.Raven:Developing a surgical robot from a concept to a transatlantic teleoperation experiment in Surgical Robotics,Systems,Applications,and Visions[M].1stedition,R.M.Satava,Ed.Springer,2011:159-197.
[17] Lum M J,Friedman D C,Sankaranarayanan G,et al.The RAVEN:design and validation of a telesurgery system[J].The International Journal of Robotics Research.2009,28(9):1183-1197.
[18] Mayer H,Nagy I,Knoll A.An Experimental System for Robotic Heart Surgery [A].18thIEEE Symposium on Computer-Based Medial System[C].2005:56.
[19] Hagn U,Konietschke R,Tobergte A,et al.DLR MiroSurge:a versatile system for research in endoscopic telesurgery[J].TheInternational Journal of Computer Assisted Radiology and Surgery,2010,5(2):183-193.
[20] Wolf A,Shoham M,Michael. Feasibility Study of a Mini Bone-Attached Robotic System for Spinal Operations Analysis and Experiments [J].Spine,2004,29(2):220.
[21] Li J M,Wang S X,Wang X F,et al.Optimization of a novel mechanism for a minimally invasive surgery robot[J].Int J Med Robotics Comput Assis Surg,2010,6(1): 83-90.
[22] 馬如奇.微創外科手術機器人執行系統研制及其控制策略研究[D]. 哈爾濱:哈爾濱工業大學,2012.
[23] R H Taylor,J Funda, B Eldridge,et al. A telerobotic assistant for laparoscopic surgery[J].IEEE Engineering in Medicine and Biology Magazine,1995,14(3):279-288.
[24] A Faraz,S Payandeh.A Robotic Case Study:Optimal Design for Laparoscopic Positioning Stands[J].The International Journal of Robotics Research,1998,17 (9):986-995.
[25] 韓軍,郝立.機器人關節空間的軌跡規劃及仿真[J].南京理工大學學報,2000, 24(6): 540-543.
[26] Godage I S,Branson D T,Guglielmino E,et al.Path planning for multisection continuum arms[A].2012 International Conference on Mechatronics and Automation (ICMA)[C].2012:1208-1213.
[27] J Marescaux,J Leroy,F Rubino,et al.Transcontinental robot-assisted remote telesurgery:Feasibility and potential applications[J].Annals of Surgery,2002,235(4):487-492.
Development Review of Laparoscopic Surgical Robotic
WANG Wei1, WANG Wei-dong1, YAN Zhi-yuan1, DU Zhi-jiang1, HE Shi-lin2, CHEN Guang-fei2, ZHOU Dan2
1. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin, Heilongjiang 150080, China; 2. Chinese PLA General Hospital, Beijing 100853, China
In recent years, minimally invasive surgery gradually being accepted for its excellent medical effects.The minimally invasive surgical techniques combined with robot technology can make up for the deficiencies of traditional minimally invasive surgery and accelerate the evolution of minimally invasive surgery. Laparoscopic surgical robotics has become an important role in the research field of robotics. This paper describes laparoscopic surgical robots at home and abroad in detail and discusses the technical difficulties as well as the future development direction.
minimally invasive surgery; medical robotic; RCM mechanism
R197.39;TP242.3
A
10.3969/j.issn.1674-1633.2014.08.001
1674-1633(2014)08-0005-06
2013-03-02
2013-03-23
作者郵箱:178833559 @qq.com
猜你喜歡
腹腔鏡外科雜志(2022年7期)2022-08-16 04:31:06
河北畫報(2020年10期)2020-11-26 07:20:50
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國內鏡雜志(2017年2期)2017-03-20 16:18:12
科技知識動漫(2016年8期)2016-07-29 20:40:09
腹腔鏡外科雜志(2016年11期)2016-06-01 12:10:09
腹腔鏡外科雜志(2016年9期)2016-06-01 12:10:07
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
