雷達(dá)機(jī)動(dòng)目標(biāo)的自適應(yīng)跟蹤算法*
2014-07-25 11:28:20李峻年
艦船電子工程 2014年4期
關(guān)鍵詞:模型
李峻年 白 穎
(1.海軍駐葫蘆島431軍代室 葫蘆島 125001)(2.92941部隊(duì)94分隊(duì) 葫蘆島 125001)
雷達(dá)機(jī)動(dòng)目標(biāo)的自適應(yīng)跟蹤算法*
李峻年1白 穎2
(1.海軍駐葫蘆島431軍代室 葫蘆島 125001)(2.92941部隊(duì)94分隊(duì) 葫蘆島 125001)
機(jī)動(dòng)目標(biāo)跟蹤一直是雷達(dá)目標(biāo)跟蹤的重點(diǎn)難點(diǎn),論文建立了一種當(dāng)前統(tǒng)計(jì)模型的目標(biāo)運(yùn)動(dòng)模型,給出了概率密度以及非零均值目標(biāo)加速度隨機(jī)過(guò)程數(shù)學(xué)表達(dá)式,結(jié)合基本Kalman濾波,建立了基于該模型的機(jī)動(dòng)目標(biāo)跟蹤自適應(yīng)算法。最后針對(duì)實(shí)際目標(biāo)機(jī)動(dòng)情況,對(duì)其進(jìn)行仿真計(jì)算,仿真結(jié)果證明,該算法具有良好的跟蹤性能。
機(jī)動(dòng)目標(biāo)跟蹤; 非零時(shí)間相關(guān)模型; 當(dāng)前概率密度; 自適應(yīng)
ClassNumberTJ391
1 引言
機(jī)動(dòng)目標(biāo)跟蹤算法的兩大要素為: 1)建立較為合理的機(jī)動(dòng)目標(biāo)運(yùn)動(dòng)模型, 2)選擇正確的濾波模型。目標(biāo)機(jī)動(dòng)模型眾多,不少學(xué)者對(duì)此進(jìn)行了大量研究,建立了眾多模型[1~6],總的來(lái)看,大致可分為“全局”統(tǒng)計(jì)模型和“當(dāng)前”統(tǒng)計(jì)模型,全局統(tǒng)計(jì)模型包括Sing模型、半馬爾可夫模型和Noval統(tǒng)計(jì)模型,它們的共同點(diǎn)是考慮了目標(biāo)機(jī)動(dòng)變化的可能性,適合于各種情況和各種類型的目標(biāo)機(jī)動(dòng),但在該模型中每一種具體情況下的戰(zhàn)術(shù)情況考慮不夠,即機(jī)動(dòng)模型精度不夠。相反,我們應(yīng)該關(guān)心的是每一種具體情況下的每一種具體機(jī)動(dòng),因此本文提出了一種基于“當(dāng)前”統(tǒng)計(jì)模型的目標(biāo)運(yùn)動(dòng)模型,并結(jié)合Kalman濾波算法,建立了機(jī)動(dòng)目標(biāo)自適應(yīng)跟蹤算法。
2 當(dāng)前統(tǒng)計(jì)模型
2.1 加速度的“當(dāng)前”概率密度
機(jī)動(dòng)目標(biāo)跟蹤的主要問(wèn)題之一是建立未知的加速度模型。此問(wèn)題由兩部分構(gòu)成,其一是表征目標(biāo)機(jī)動(dòng)的隨機(jī)過(guò)程性,即這種隨機(jī)過(guò)程是白色的,還是時(shí)間相關(guān)的;其二涉及到運(yùn)動(dòng)加速度的特定概率密度函數(shù)[7~8]。對(duì)于第一部分,許多學(xué)者更傾向于把目標(biāo)看成是相關(guān)隨機(jī)過(guò)程。而對(duì)概率密度而言,可認(rèn)為當(dāng)目標(biāo)正以某一加速度機(jī)動(dòng)時(shí),它在下一瞬時(shí)的加速度是有限的,而且只能在“當(dāng)前”加速度的鄰域內(nèi)。因此在描述加速度的概率密度時(shí),機(jī)動(dòng)加速度的取值范圍可以大大減小,并且不用考慮機(jī)動(dòng)加速度取值的所有可能性,在每一瞬間,一種時(shí)變的機(jī)動(dòng)加速度概率密度函數(shù)將對(duì)應(yīng)于目標(biāo)“當(dāng)前”加速度的變化[9]。基于以上考慮,可選用修正的瑞利密度函數(shù)作為當(dāng)前統(tǒng)計(jì)模型的概率密度函數(shù),為
(1)
其中amax>為已知的目標(biāo)加速度上限,a為目標(biāo)隨機(jī)加速度,μ>0為一常數(shù)。
a的均值和方差為

(2)
(3)
當(dāng)目標(biāo)的“當(dāng)前”加速度為負(fù)時(shí),概率密度函數(shù)為
(4)
a的均值和方差為
(5)
(6)
當(dāng)目標(biāo)的“當(dāng)前”加速度為零時(shí),概率密度函數(shù)為
P(a)=δ(a)
(7)
式中δ(·)為狄拉克函數(shù)。在上述概率密度函數(shù)中,每一瞬時(shí)機(jī)動(dòng)加速度的概率密度是不同的,一旦“當(dāng)前”加速度值被給定,加速度概率密度函數(shù)便完全確定。
2.2 機(jī)動(dòng)加速度的非零均值時(shí)間相關(guān)模型
在“當(dāng)前”統(tǒng)計(jì)模型概念條件下,當(dāng)目標(biāo)正以某一加速度機(jī)動(dòng)時(shí),加速度采用零均值模型是不符合實(shí)際的,因此可假設(shè)目標(biāo)加速度是非零均值的時(shí)間相關(guān)隨機(jī)過(guò)程,即:

(8)
(9)

通過(guò)Wiener-Kolmogorov的白化過(guò)程[10~11],式(8)可表示為一階平穩(wěn)相關(guān)的Markov過(guò)程:

(10)
其中α是機(jī)動(dòng)時(shí)間常數(shù)的倒數(shù)。
3 基于“當(dāng)前”統(tǒng)計(jì)模型的自適應(yīng)卡爾曼濾波算法
3.1 自適應(yīng)卡爾曼濾波算法
設(shè)采樣周期為T,根據(jù)以上對(duì)零均值相關(guān)運(yùn)動(dòng)模型的描述,得到該模型的目標(biāo)狀態(tài)方程:

(11)

(12)
(13)
W(k)為離散時(shí)間白噪聲序列,方差為
(14)
QM是與a和周期T有關(guān)的常量矩陣[5]。
設(shè)目標(biāo)的觀測(cè)方程為
Y(k)=H(k)X(k)+V(k)
(15)
其中H(k)=[1,0,0],V(k)為高斯觀測(cè)噪聲,其均值為零,方差為R(k)。
采用狀態(tài)方程式(11)和式觀測(cè)方程(15),利用標(biāo)準(zhǔn)卡爾曼濾波遞推關(guān)系,得到基于“當(dāng)前”統(tǒng)計(jì)運(yùn)動(dòng)模型的機(jī)動(dòng)目標(biāo)跟蹤算法的基本過(guò)程,如下:

(16)
P(k+1/k)=φ(k)P(k/k)φT(k)+Q(k)
(17)
K(k+1)=P(k+1/k)HT[H(k+1)P(k+1/k)HT×(k+1)+R(k+1)]-1]
(18)

(19)
P(k+1/k+1)=[I-K(k+1)H(k+1)]P(k+1/k)
(20)

(21)

(22)
當(dāng)“當(dāng)前”加速度為負(fù)時(shí),有:
(23)
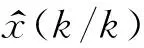
3.2 自適應(yīng)濾波系統(tǒng)
(24)
當(dāng)“當(dāng)前”加速度為負(fù)時(shí),有:
(25)
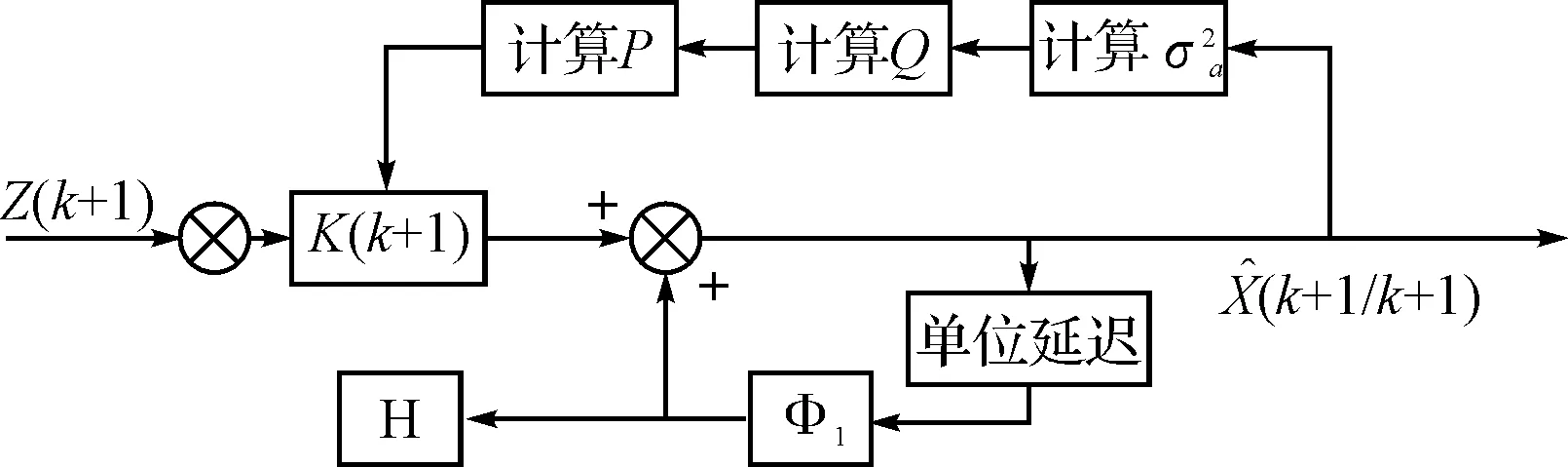
圖1 自適應(yīng)濾波系統(tǒng)
4 仿真結(jié)果與分析
為了驗(yàn)證該算法的有效性,下面分別用全局統(tǒng)計(jì)模型Singer模型和當(dāng)前統(tǒng)計(jì)模型兩種方法對(duì)典型目標(biāo)機(jī)動(dòng)情況進(jìn)行仿真,對(duì)比分析。仿真中,假設(shè)觀測(cè)噪聲方差與目標(biāo)距離的平方成正比,即觀測(cè)噪聲:
V(k)=(βx(k)+Δx0)ω(k)
(26)
式中β為相對(duì)誤差系數(shù),Δx0為固定測(cè)量誤差,ω(k)是均值為零,方差為1的正態(tài)分布隨機(jī)數(shù),觀測(cè)噪聲方差為
R(k)=(βx(k)+Δx0)2·E[ω2(k)]
(27)
仿真中參數(shù)取值為Δx0=30km,β=0.01,α=0.1,T=1。假設(shè)目標(biāo)作恒加速運(yùn)動(dòng),其加速度為20m/s2,仿真曲線如圖2、圖3所示。實(shí)線段表示基于當(dāng)前統(tǒng)計(jì)模型的跟蹤結(jié)果,虛線段表示Singer模型的跟蹤結(jié)果。從仿真結(jié)果可以看到目標(biāo)作等加速度運(yùn)動(dòng)時(shí),Singer模型無(wú)法給出正確的加速度估計(jì)。
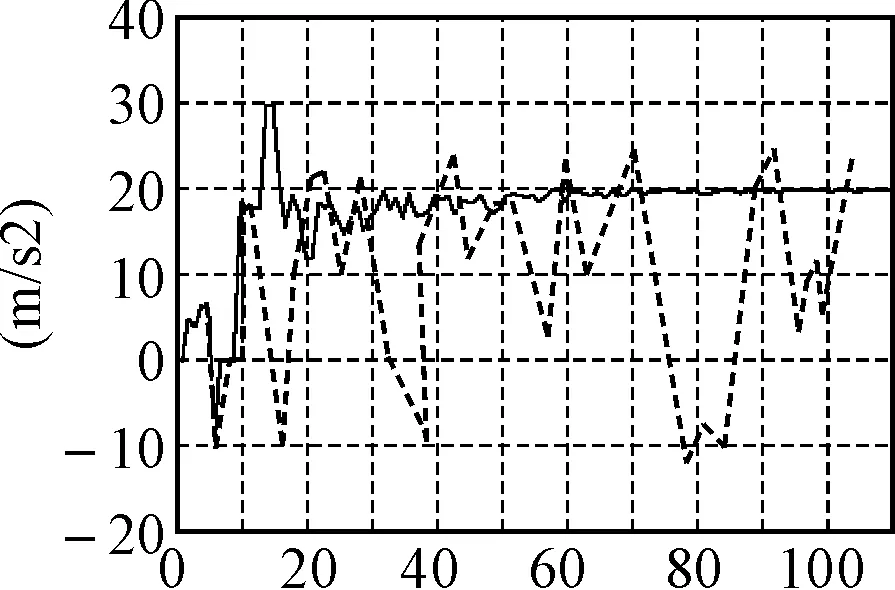
圖2 機(jī)動(dòng)目標(biāo)加速度仿真結(jié)果
圖3 機(jī)動(dòng)目標(biāo)速度仿真結(jié)果
5 結(jié)語(yǔ)
仿真結(jié)果證明,本文提出的基于當(dāng)前計(jì)模型的機(jī)動(dòng)目標(biāo)自適應(yīng)跟蹤算法能更好地反映目標(biāo)的實(shí)際機(jī)動(dòng)情況,它的跟蹤機(jī)動(dòng)目標(biāo)能力更強(qiáng),效果更佳。
[1]肖雷,劉高峰,魏建仁.幾種機(jī)動(dòng)目標(biāo)運(yùn)動(dòng)模型的跟蹤性能對(duì)比[J].火力與指揮控制,2004(1):10-13.
[2]高羽,張建秋.機(jī)動(dòng)目標(biāo)的多項(xiàng)式預(yù)測(cè)模型及跟蹤算法[J].航空學(xué)報(bào),2009,30(8):1479-1489.
[3]張強(qiáng),孫堯,萬(wàn)磊,等.多普勒測(cè)速聲吶的自適應(yīng)Kalman濾波算法[J].哈爾濱工程大學(xué)學(xué)報(bào),2011,12(32):1534-1537.
[4]陳莉,徐慶民.一種新的機(jī)動(dòng)目標(biāo)跟蹤的多模型算法[J].山西國(guó)防工業(yè)職業(yè)技術(shù)學(xué)院學(xué)報(bào),2008(2):18-21.
[5]徐吉莉,高立娥,張超.水下目標(biāo)運(yùn)動(dòng)參量估計(jì)及仿真技術(shù)[C]//2012中國(guó)西部聲學(xué)學(xué)術(shù)交流會(huì)議論文集,2012(2):98-102.
[6]RA Singer Estimating Optimal Tracking Filter Performance of Manned Maneuvering Targets[J]. IEEE Transactions on Aerospace and Electronic Systems,1970,6(4):473-483.
[7]周宏仁.機(jī)動(dòng)目標(biāo)“當(dāng)前”統(tǒng)計(jì)模型與自適應(yīng)跟蹤算法[J].航空學(xué)報(bào),1983,4(1):73-86.
[8]曾勁松,朱巖,姚善粱.軟件聲納的目標(biāo)自動(dòng)跟蹤系統(tǒng)建模[J].現(xiàn)代電子技術(shù),2010(14):73-75.
[9]馮道旺,李騰,黃知濤.平方根二階EKF及其在目標(biāo)運(yùn)動(dòng)分析中的應(yīng)用[J].系統(tǒng)工程與電子技術(shù),2009,31(9):2101-2105.
[10]劉福聲,羅鵬飛.統(tǒng)計(jì)信號(hào)處理平[M].長(zhǎng)沙:國(guó)防科技大學(xué)出版社,1999:156-187.
[11]白士君,凌國(guó)民.水聲網(wǎng)絡(luò)探測(cè)節(jié)點(diǎn)的一種運(yùn)動(dòng)目標(biāo)參數(shù)估計(jì)算法[J].艦船電子工程,2010,30(5):186-188.
AdaptiveTrackingAlgorithmofRadarManeuveringTarget
LI Junnian1BAI Ying2
(1. Navy Representative Office in 431 Plant, Huludao 125001)(2. Unit 94, No. 92941 Troops of PLA, Huludao 125001)
The maneuvering mobile target tracking has been the most important and difficult problems in the radar data processing. First a current statistical model of maneuvering target is set up in the paper. Then the probability density and the algorithm of random process about the nonzero time related model are presented. Combing the Kalman Filter, the adaptive tracking algorithm of maneuvering target is set up. Finally the algorithm is simulated, and the simulating result proves the effectiveness of the algorithm.
the maneuvering target track, nonzero time related model, current probability density, adaptive
2013年10月7日,
:2013年11月27日
李峻年,男,工程師,研究方向:水下武備總體研究。白穎,女,工程師,研究方向:艦炮系統(tǒng)試驗(yàn)與研究。
TJ391DOI:10.3969/j.issn1672-9730.2014.04.009
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19