艦船消磁設備軟件功能改進設計*
2014-07-25 11:28:21徐杰
艦船電子工程 2014年4期
徐 杰
(海軍駐桂林地區軍事代表室 桂林 541002)
艦船消磁設備軟件功能改進設計*
徐 杰
(海軍駐桂林地區軍事代表室 桂林 541002)
在以往艦船消磁設備軟件功能基礎上,論文新增電源模塊數量增加或減少時的均流計算、三相電源和電源模塊異常情況的報警與處理等功能,大幅改進消磁設備的軟件功能,實現了消磁設備的高度智能化。
消磁設備; 軟件功能; 改進設計
ClassNumberTP391
1 引言
某新型消磁設備,屬于研制的最新一代智能型消磁設備[1~2]。在以往艦船消磁設備軟件功能的基礎上,本文新增電源模塊數量增加或減少時的均流計算、三相電源和電源模塊異常情況的報警與處理、三相電源和負載電流傳感器電壓傳感器的狀態自檢等功能,大幅改進消磁設備的軟件功能,實現了消磁設備的高度智能化[3~4]。
2 硬件框圖及功能說明
消磁設備硬件框圖如圖1所示,整個監控模塊中,一共采用四塊ARM嵌入式系統(LPC1768芯片)進行數據處理,其中主用(ARM1)、備用(ARM2)監控模塊各一個,用于接收處理CAN1發送的控制信息及返回消磁電源的狀態信息,具有互相監控的功能;主備用切換開關(ARM3)用于判斷主用(ARM1)、備用(ARM2)的狀態,切換到工作正常的監控模塊上;ARM4用于測量繞組電阻值和電感值以及接收以太網信號(預留接口),通過CAN總線與ARM1、ARM2連接[5~8]。
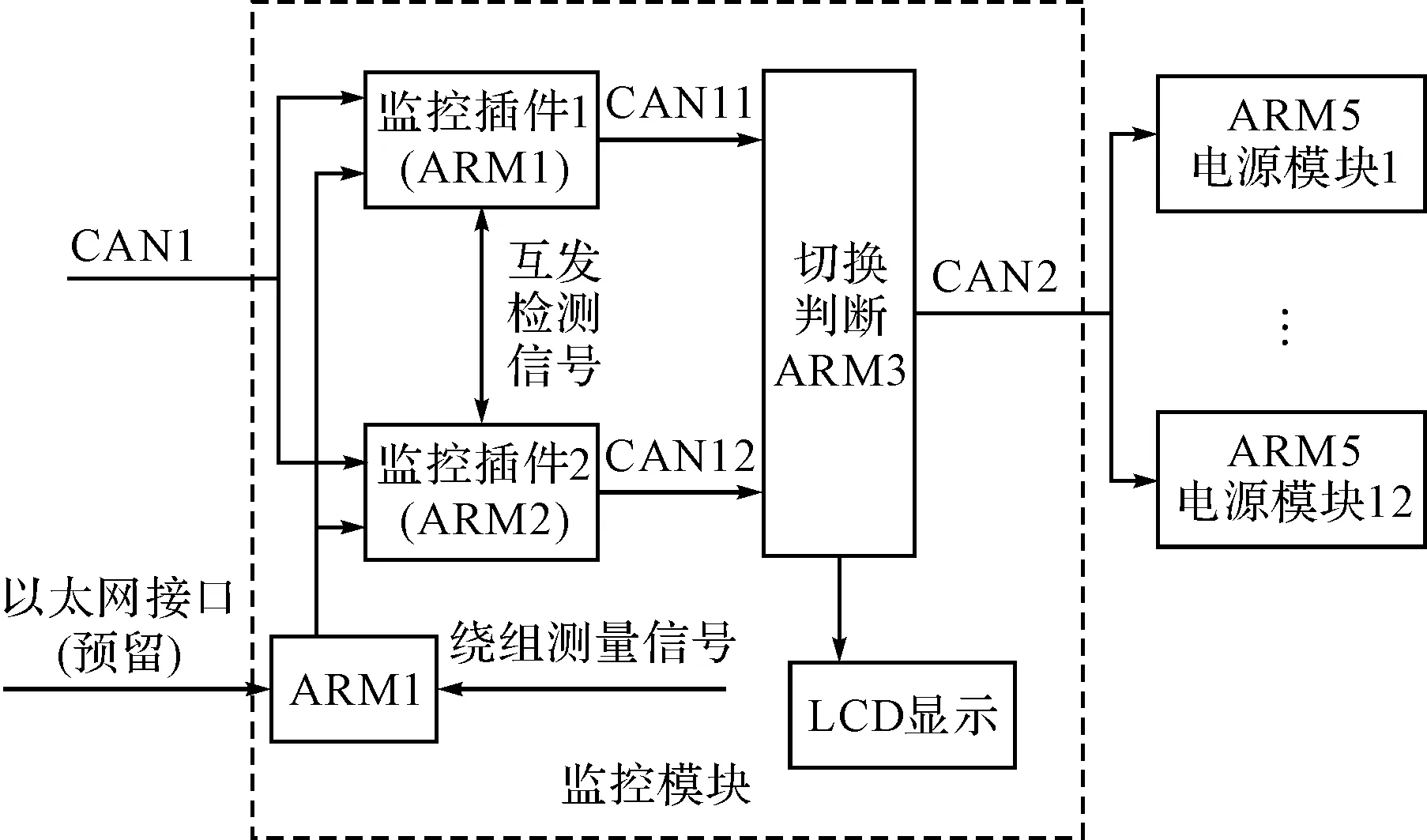
圖1 硬件框圖
四組12個電源模塊中,每一個電源模塊由ARM5接收CAN信號控制信號,通過D/A轉換,輸出模擬控制信號控制電源模塊的電流,并返回電源模塊狀態信息。
3 監控模塊軟件設計說明
3.1 ARM1、ARM2功能說明
1)輸入電源檢測功能
主用監控模塊與備用監控插件完成自檢后,對四路三相輸入電源狀態進行檢測,根據四路三相輸入電源狀態檢測電路的信號變化,對四路三相輸入電源進行缺相、欠壓、過壓的判斷,并進行相應處理,具體方法如下:
當A相斷,A11是1.6V,B11是3V;
當B相斷,A11是3V,B11是1.6V;
當C相斷,A11是1.6V,B11是1.6V;
欠壓時,A11輸出低于2.7V,B11輸出低于2.7V;
過壓時,A11輸出高于3.18V,B11輸出高于3.18V。
發生過壓、欠壓故障時,控制繼電器斷開該路電源模塊供電電路。
缺相時,對控制儀發來的控制信號進行處理(低于額定控制信號的0.7倍時,直接輸出,高于額定控制信號的0.7倍時按額定控制信號0.7倍輸出),處理后,通過CAN總線送出。
2)輸出電流均流計算功能
把電流數值除以電源模塊數M,得到每個電源模塊控制信號,再以CAN總線方式發送給電源模塊。
在實現電源模塊數增加或減少(出現故障)情況下,通過判斷具體情況分別按以下方式處理。
(1)當電源模塊數量增加時,監控系統首先根據增加模塊的插槽號,將原有M個模塊編為一組,新增加模塊為一組。原來模塊的控制量逐漸減小,增加的第M+1模塊,其控制量從0逐漸增加,最后達到平均分配,實現M+1總分配。根據原電源模塊標識地址與新增加電源模塊地址不同,把不同命令值,通過CAN2總線,分別傳送給M+1個電源模塊。
(2)當電源模塊出現故障時,須重新配置(均分)電源模塊的控制信號。如一組M個電源模塊中某個電源模塊出現故障,電源模塊數從M減小到M-1,控制量從總量的1/M逐漸增加到1/(M-1),通過CAN2總線,分別傳送給該組中各個電源模塊。
以上通過數字處理后,各電源模塊通過CAN2總線接收命令,通過D/A轉換為模擬信號,控制電流放大電路,實現大電流輸出。
3)CAN1中斷子程序
ARM1、ARM2都包含了CAN1中斷子程序。
(1)以最高優先級處理CAN發送的命令信號,根據協議,提取:電流值、啟動信號、停止信號。對電流信號均流處理后,分別以CAN11和CAN12送出。
(2)均流處理中,根據先運行的電源模塊數量,中斷子程序及時調整均流方案,在電源模塊數量發生變化后,保證均流后信號的軟切換(無跳變切換)。具體程序流程圖如圖2所示。
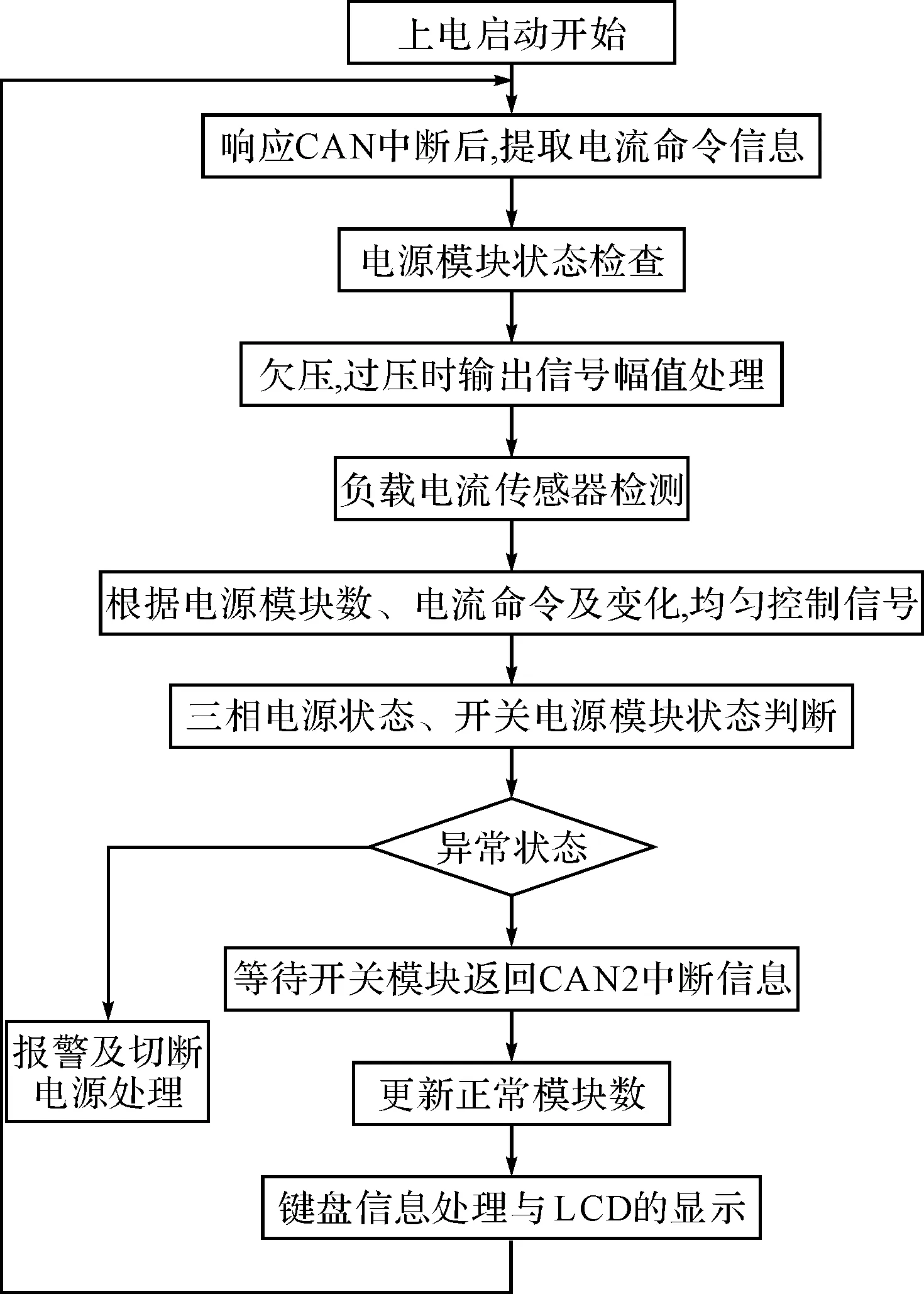
圖2 CAN1中斷子程序
4)其它功能
(1)可通過鍵盤及LCD顯示屏進行操作,設置過壓、欠壓報警門限、每路電源模塊數量及更改密碼。
(2)手動、自動運行的切換,手動運行時,可設置輸出電流值。
(3)主監控與備用監控是同時并行工作,在每個程序循環中,主監控與備用監控各自發給對方確認信號,表示自己正常循環工作。
(4)根據接收到的對方確認信號,判斷對方工作是否正常,置復相應的標志位。
具體程序流程圖如圖3所示。
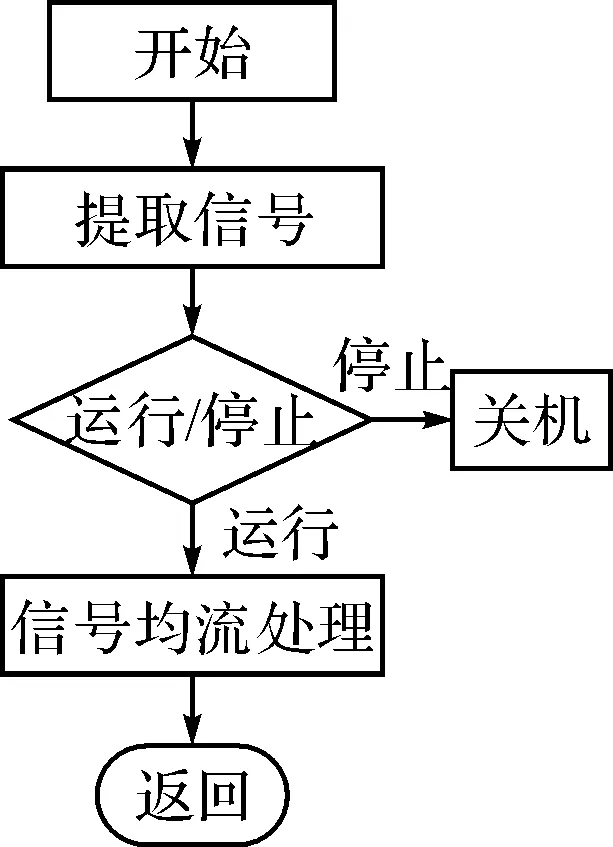
圖3 ARM1、ARM2主程序
3.2 ARM3切換功能說明
1)以CAN2總線形式,監控模塊與各電源模塊交流數據和傳遞電流控制命令,把電源模塊狀態信息上傳給監控系統,以便監控模塊對故障進行處理。
2)各電源模塊(12個)按照插入控制柜中位置對應地址標識,接收監控系統發來的對應數據。
3)各個電源模塊將狀態信息和電源的位置(ID地址)一起上傳給監控模塊。
4)ARM3根據兩個監控模塊的運行狀態,對主監控模塊ARM1和備監控模塊ARM2分別輸出的CAN11和CAN12數據的標志位進行判斷切換。將均流處理后的數據通過CAN2發送給電源模塊,并以較低優先級,從CAN2總線接收電源模塊返回的狀態信息。
上述過程由ARM3完成,ARM3對前端傳送過來的信息進行識別、判斷并提取正確信息發送給后端電源模塊[9~10]。具體程序流程圖如圖4所示。
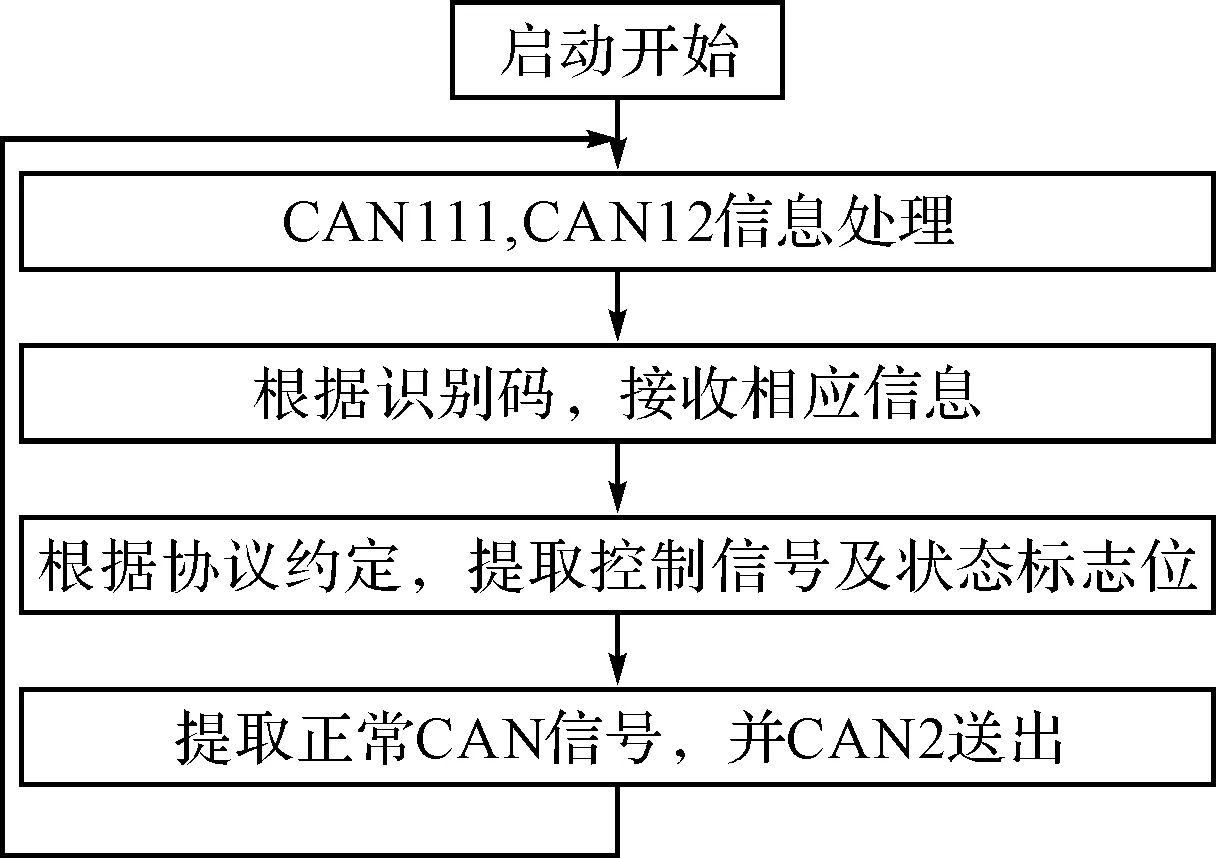
圖4 ARM3主程序
此外,本設備中ARM4具有兩個功能:測量繞組電阻及電感值及為以太網預留接口。
4 電源模塊(ARM5)軟件設計說明
1)主程序完成鍵盤的掃描,對該電源模塊插入控制柜的插槽號和增益比例值進行記憶保存與修改處理,對輸出電流和電壓采樣,對負載開路短路等進行分析。
2)從CAN2得到電流命令信號,處理后,通過D/A轉換,得到模擬電流命令信號,控制電源模塊的輸出電流。
3)測量風扇口、散熱器溫度,并與設定值比較,如果溫度過高,蜂鳴報警。
4)定時對輸出電流進行采樣,為電源模塊和負載狀態分析提供數據。
電源模塊程序以及CAN2中斷子程序流程圖如圖5所示。

圖5 電源模塊主程序
5 結語
在以往艦船消磁設備軟件功能的基礎上,國內研制的最新一代智能型消磁設備新增了電源模塊數量增加或減少時的均流計算、三相電源和電源模塊異常情況的報警與處理、三相電源和負載電流傳感器電壓傳感器的狀態自檢等功能,大幅改進消磁設備的軟件功能,實現了消磁設備的高度智能化。
[1]周耀忠,張國友.艦船磁場分析與計算[M].北京:國防工業出版社,2004:21-26.
[2]葉平賢,龔沈光.艦船物理場[M].北京:兵器工業出版社,1992:33-36.
[3]GJB 2786-96武器系統軟件開發[S].
[4]GJB 5236-2004軍用軟件質量度量[S].
[5]鄭宗漢.實時系統軟件基礎[M].北京:清華大學出版社,2002:35-60.
[6]李小群.進程間通信機制的分析與比較[J].計算機科學,2002,29(11):58-61.
[7]周之英.現代軟件工程[M].北京:科學出版社,1999:17-19.
[8]姜啟源.數學模型[M].北京:高等教育出版社,1993:31-35.
[9]樊昌信,張甫翎,徐炳祥,等.通信原理[M].北京:國防工業出版社,2001:14-15.
[10]胡培勤.Matlab在數字通信系統仿真中的應用[J].佛山科技技術學員學報,2007(7):24-26.
ImprovementDesignofSoftwareFeaturesofMarineDegaussingEquipment
XU Jie
(Navy Military Representative Office of Guilin, Guilin 541002)
Based on the past software features of marine degaussing equipments, this paper adds the average current calculation when power supply module increase or decrease, alarm and handling when three-phase sources and power supply module are unusual. It improves the software features of marine degaussing equipment significantly, and achieves the highly intelligent of degaussing equipment.
degaussing equipment, software features, improvement design
2013年10月28日,
:2013年12月1日
徐杰,男,碩士,工程師,研究方向:電磁環境及防護工程。
TP391DOI:10.3969/j.issn1672-9730.2014.04.049
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
消費者報道(2014年7期)2014-07-31 11:23:57