基于PMAC2的刀具刃磨中心定位精度控制研究*
2014-07-19 12:33:25王占領
組合機床與自動化加工技術 2014年5期
關鍵詞:系統
王占領
(陜西理工學院 機械工程學院,陜西 漢中 723003)
基于PMAC2的刀具刃磨中心定位精度控制研究*
王占領
(陜西理工學院 機械工程學院,陜西 漢中 723003)
數控機床定位精度和重復定位精度直接影響數控機床的加工精度。通過對刀具刃磨中心控制系統PID參數、速度和加速度前饋參數的整定,分析了影響系統定位精度的原因,并利用系統螺距誤差補償的方法對刀具刃磨中心進給系統的定位精度進行了補償。試驗結果表明該誤差補償策略顯著提高了系統的位置精度和運動精度,為提高機床的加工精度奠定了基礎。
數控機床;精度分析;螺距誤差補償
0 引言
位置控制系統的精度是數控機床中位置控制的重要指標,主要包括運動精度和位置精度,位置精度是運動目標在數控系統控制下運動所能達到目標位置的精確程度,主要有定位精度和重復定位精度。其中定位精度對位置精度影響最大。例如對數控機床進給系統,將影響直線控制系統工件的尺寸精度;對輪廓控制系統,如定位精度較低將產生輪廓失真。
PMAC運動控制器是世界上功能最強的運動控制器之一,借助于Motorola 的DSP56000 系列數字信號處理器技術,具有很強的控制功能,同時具有螺距誤差補償功能。文章通過對刀具刃磨中心進給系統定位精度的試驗,測量了進給系統螺距誤差并利用螺距誤差補償的方法提高進給系統的定位精度。
1 進給系統精度控制
針對所設計的刀具刃磨中心機床,進給部分包括三個移動軸和兩個轉動軸,反饋部分由編碼器和光柵復合反饋構成,運動控制器采用Tubro PMAC2 PCI型卡,上位機采用工控機,利用調整軟件Pewin32 PRO2對光柵反饋的位置信號進行測量并繪制響應曲線(調整時X軸對應2號電機)。
1.1 通過階躍激勵控制系統靜態精度
階躍信號是線性定常系統中最差的激勵信號,如果系統在階躍激勵作用下能滿足要求的話,在其它激勵信號作用下基本也能滿足要求。在實際階躍響應調整過程中,采用自動+手動的方式對系統的PID參數進行整定,圖1為X軸電機階躍響應調整曲線。

圖1 X軸階躍響應調整曲線
圖1a為系統自動調節時的脈沖響應,系統的跟隨誤差較大同時伴隨有振蕩,圖1b響應曲線反應出系統的跟隨誤差雖然存在但已明顯減小;圖1c表明系統存在超調;曲線圖1d的曲線比較理想,基本能夠滿足控制要求。
1.2 通過拋物線激勵控制系統動態精度
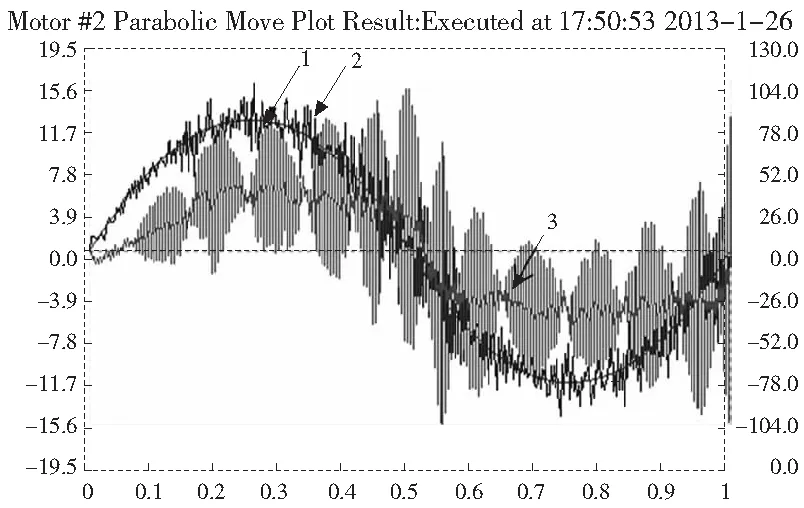
對于沒有前饋的伺服系統來說,跟隨誤差和速度、加速度是成比例的。系統引入速度前饋和加速度前饋項后,通過拋物線響應調節速度和加速度前饋,可減小甚至消除系統跟隨誤差。圖2為X軸電機拋物線響應調整曲線。

(a)Kvff=5494
(b)Kvff=1000

(c)Kvff=2050 1.響應曲線 2.理論曲線 3.速度跟隨誤差曲線圖2 X軸拋物線響應調整曲線
圖2a響應曲線表示系統拋物線響應過程中速度跟隨誤差反相,主要原因是速度前饋系數Kvff過大,應減小Kvff加以調節;圖2b表示速度跟隨誤差過大,原因主要是阻尼的影響,應增加速度前饋系數Kvff加以調節;圖2c的速度跟隨誤差基本上到最小了,誤差曲線沿運動軌跡均勻分布在中部,是較理想的調節結果。
2 位置精度試驗及結果分析
以X軸為例說明螺距誤差補償的方法。在補償之前需要測定滾珠絲杠螺距誤差和定位精度。
2.1 定位精度試驗方案
以X軸作為目標軸進行定位精度測量。X軸的直線行程400mm,在全程取等長的5個目標位置進行測量,測量工具采用光柵尺。測量采用圖3所示標準檢驗方式進行。
根據對X軸檢驗數據的處理結果可知,刀具刃磨中心機床X軸定位精度和重復定位精度分別為:
定位精度:A=0.0484mm
重復定位精度:R=0.0317mm

圖3 X軸精度檢驗循環示意圖
2.2 定位精度螺距誤差補償
螺距誤差曲線可以用試驗的方式獲得。X軸的行程400mm,滾珠絲杠螺母副的螺距為5mm,每隔5個螺距(即25mm)測一個點,通過16個點測出螺距誤差,計算出補償量(表1),繪制誤差曲線(圖4)。

圖4 X軸補償前后螺距誤差曲線
根據螺距誤差補償表,編寫如下補償程序,并下載至PMAC2卡上運行。
DELETE GATHER
del comp
#2 DEFINE COMP 16,1600000:2號電機補償16個點,間距100000,即25mm
320 640 1280 1707 1493 1280 2080 2773 2133 1653 1280 1173 1013 1280 1333 0:補償值
I286=0 :0位補償數據為0I51=1 :打開補償功能

表1 X軸向螺距累積誤差及補償量(部分)
2.3 補償前后位置精度比較
通過對X軸的定位精度的再次檢測,對螺距誤差補償前后系統性能進行了比較,檢測結果如圖4,比較結果見表2,可以看出經過螺距誤差補償后精度有了顯著的改善,實現了提高系統定位精度和重復定位精度的目的。

表2 X軸補償前后精度比較
3 結論
數控機床進給系統的精度由多因素決定,只有通過多方面的措施才能有效地控制精度。合理的PID參數可以改善數控進給系統的穩態性能和品質,加速度/速度前饋能夠提高數控進給系統的運動精度,而螺距誤差補償方法的運動可以有效提高系統的定位精度。
[1] 張珂, 吳玉厚, 李頌華,等. 基于PMAC-PC的精密加工系統的設計與實現[J]. 機械設計與研究, 2004, 20(4):72-74.
[2] 陳勇, 徐偉. CNC2190數控龍門銑床螺距誤差補償與重建[J].制造技術與機床, 2011(8):207-209.
[3] 李繼中. 數控機床螺距誤差補償與分析[J].組合機床與自動化加工技術, 2010 (2): 98-101.
[4] 朱立達, 朱春霞, 蔡光起. PID調節在PMAC運動控制器中的應用[J]. 組合機床與自動化加工技術, 2007(2): 50-53.
(編輯 李秀敏)
Study on Positioning Accuracy Control for Tool Grinding Center Based on PMAC2
WANG Zhan-ling
(School of Mechanical Engineering, Shaanxi University of Technology, Hanzhong Shaanxi 723001,China)
The positioning accuracy and repetitive positioning accuracy of NC machine is directly affected machining accuracy. The reason for system positioning accuracy is analyzed through adjustment of PID parameters of tool grinding center control system, velocity and acceleration. Positioning accuracy of feed system is compensated by means of error compensation of screw pitch methods. The result shows that positioning accuracy and movement accuracy are significantly increased. Then this study lay a foundation for improvement of machining accuracy.
NC machine ; accuracy analysis ; error compensation of screw pitch
1001-2265(2014)05-0121-02
10.13462/j.cnki.mmtamt.2014.05.031
2013-09-17;
2013-10-12
陜西省工業攻關項目基金(2009K07-09)
王占領(1975—),男,陜西大荔人,陜西理工學院實驗師,碩士,主要從事機電控制及產品研發等,(E-mail)haizhiin@163.com。
TH166;TG71
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32