異步電機定子磁場定向無速度傳感器矢量控制研究
2014-07-19 12:32:23蘇亮亮魏玲玲
組合機床與自動化加工技術 2014年5期
關鍵詞:磁場
蘇亮亮,魏玲玲
(1.大連理工大學 控制科學與工程學院, 遼寧 大連 116024;2.鄭州成功財經學院 信息工程系,鄭州 451200)
異步電機定子磁場定向無速度傳感器矢量控制研究
蘇亮亮1,魏玲玲2
(1.大連理工大學 控制科學與工程學院, 遼寧 大連 116024;2.鄭州成功財經學院 信息工程系,鄭州 451200)
針對異步電機轉子磁場定向RFO矢量控制系統對轉子側參數的過度依賴問題,提出了一種基于定子磁場定向SFO的無速度傳感器矢量控制算法。該算法采用轉差頻率ωs經PI調節器直接控制定子電流的轉矩分量isq,通過一種具有飽和限幅的改進積分器觀測定子磁鏈ψs,運用模型參考自適應MRAS估計電機轉速,實現對電機的雙閉環控制。通過Matlab/Simulink對該控制算法進行大中小容量電機的低速空載及負載條件下的實驗研究。實驗結果表明該算法在參數整定合適的前提下適用于各種容量的交流電機,轉速的估計值與實測值一致,系統具有良好的靜動態性能。
定子磁場定向;PI調節器;模型參考自適應;無速度傳感器
0 引 言
目前的高性能交流調速系統均需要實時速度反饋信號,常見的速度檢測方法多采用光電編碼盤、旋轉變壓器及測速發電機等,但這些傳感器的安裝增加成本的同時降低了系統的魯棒性;安裝的過程中存在一個同心度的問題,速度反饋信號的精度也受一定影響[1];電力機車牽引等工業場合由于溫度高且空間有限不適合安裝光電碼盤等速度傳感器,常常采用無速度傳感器技術和霍爾傳感器的補償相結合,保證高性能的交流調速性能。
基于轉子磁場定向矢量控制RFO以其優良的性能運用廣泛。在實際運用中,其轉子磁場的定向精度嚴重依賴于電機轉子側參數,尤其是轉子電阻Rr在長期運行時的變化影響轉子時間常數Tr,進而影響了系統的整體性能。由交流電機磁場加速法原理知:在控制過程中,只要能使電機的定子、轉子或者氣隙磁鏈中有一個磁鏈的幅值保持不變,那么電機的電磁轉矩Te和轉差ωs成正比,控制轉差ωs就能控制轉矩Te。矢量控制有定子和轉子磁場定向兩種,定子磁場定向的磁鏈估計中僅需定子電阻Rs一項參數,對電機的參數依賴小,系統的魯棒性更強。

1 系統控制原理
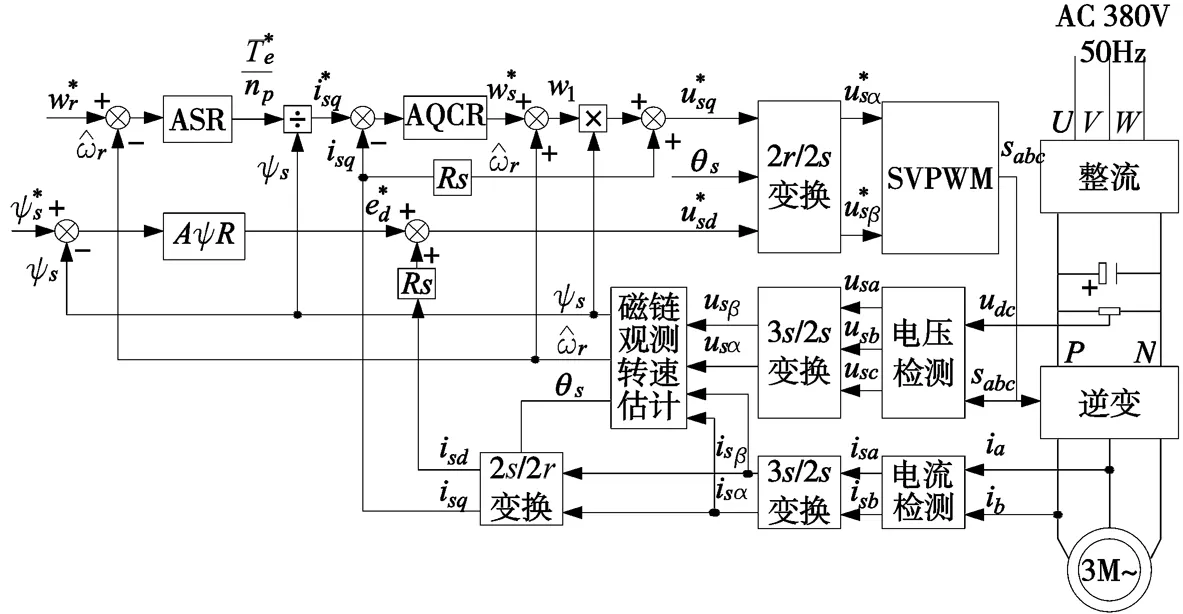
圖1 系統整體控制原理框圖
圖1系統主要來自于標量型轉差頻率的恒u/f(壓頻比)控制和轉子磁場定向RFO的轉差頻率矢量控制[2]。前者基于電機的穩態數學模型,僅通過控制定子電流is的幅值來實現轉差ωs對轉矩Te的控制,前提是氣隙磁通ψσ不變。在動態調速過程中電流的相位會對氣隙磁通ψσ和電磁轉矩Te均產生影響,不適用于高性能的調速領域;后者的主要是通過轉子磁場定向,得出轉差ωs與轉矩Te的確切關系式(8)、(9),通過對定子電流的勵磁分量ism和轉矩分量ist的解耦,分別控制電機的磁鏈和轉矩,可以達到近似直流電機雙閉環控制的效果,但其磁場定向的準確度嚴重依賴于轉子側參數,尤其是轉子電阻,而在電機運行過程中不可避免的轉子電阻會發生變化,嚴重時控制效果非常不理想。
異步電機按定子磁鏈定向時,同步旋轉坐標系的d軸定向于定子磁鏈ψs方向,其旋轉速度為定子磁鏈的速度ωe,定子磁鏈和電壓方程[3]如下:
ψsd=Lsisd+Lmird=ψs
(1)
ψsq=Lsisq+Lmirq=0
(2)
usd=pψsd+Rsisd
(3)
usq=w1ψsd+Rsisq
(4)
urd=Lmpisd+Lrpird-wsLmisq-wsLrirq+Rrird=0
(5)
urd=Lmpisq+Lrpirq+wsLmisd+wsLrird+Rrirq=0
(6)
將式(1)、(2)代入式(5)、(6),消去變量ird和irq,整理得:
(7)
(8)
(9)
(10)
2 定子磁鏈觀測
定子磁鏈的準確觀測嚴重影響定子磁場定向SFO的精度,保持定子磁鏈幅值|ψs|的恒定是調速算法的前提條件。傳統的磁鏈觀測采用U-I模型,其中的純積分環節存在直流偏移和初始值問題,觀測精度有限;采用一階低通濾波器代替積分器,解決上述問題的同時引起了輸出信號的幅值和相位誤差偏移,具有飽和限幅的雙積分器方法可以有效的解決純積分器和一階低通濾波器的這些問題[5],可將其應用于異步電機的磁鏈的觀測中來。


圖2 閾值固定的雙積分器原理框圖
3 轉速估計
該系統采用模型參考自適應算法MRAS對轉速n進行估算[9]。傳統的采用電機數學模型推導出電機轉速的計算公式,該方法缺少誤差調節環節的開環估計,轉速估計的噪聲毛刺較多。為實現轉速的平滑估計,將電機的轉子磁鏈ψr分別按照電壓和電流模型進行估計,電流模型中含有轉速參數作為可調模型,根據兩種磁鏈估計方法的誤差經PI自適應的調節轉速估計值,可以達到滿意的調速效果。
(11)
(12)


圖3 MRAS速度辨識算法原理框圖
4 仿真結果


表1 實驗電機參數








圖4 低速空載特性測試實驗 圖5 低速額定負載特性測試實驗
5 結論

[1] 張浩,戴先中.基于定子磁場定向的感應電機無速度傳感器控制研究[J]. 電氣傳動, 2010, 40(3): 20-22.
[2] 徐靜.異步電機按定子磁鏈定向的連續型矢量控制策略的研究與實現[D].上海:上海大學,2006.
[3] Myoung-Ho S., Dong-Seok H., Soon-Bong C. and Song-Yul C. An Improved Stator Flux Estimation for Speed Sensorless Stator Flux Orientation Control of Induction Motors. IEEE Trans. on Power Electronics, 2000, 15(2): 312-318.
[4] Ju-Suk L., Takaharu T., Nobuyuki M. Stator-Flux-Oriented Sensorless Induction Motor Drive for Optimum Low-Speed Performances. IEEE Trans. on Industry Application, 1997, 33(5): 1170-1176.
[5] Hu J., Wu B. New integration algorithms for estimating motor flux over a wide speed ranges. IEEE Trans. on Power Electronic, 1998, 13(5): 969-977.
[6] Xingyi Xu, Donald W. Novotny. Implementation of Direct Stator Flux Orientation Control on a versatile DSP Based System. IEEE Trans. On Industry Application, 1991, 27(4): 694-700.
[7] Tae-Won Chun, MEONG-Kyu Choi, and Bimal K. Bose. A novel startup scheme of stator-flux-oriented vector-controlled induction motor drive without torque jerk. IEEE Trans. On Industry Application, 2003, 39(3): 776-782.
[8] 劉軍鋒.定子磁場定向無速度傳感器系統研究與開發[D]. 武漢:華中科技大學,2005.
[9] 王成元,夏加寬,孫宜標.電機現代控制技術[M].北京:機械工業出版社,2006.
(編輯 李秀敏)
Research on Induction Motor Stator Flux Oriented Speed Sensorless Vector Control
SU Liang-liang1, WEI Ling-ling2
(1. School of Control Science and Engineering ,Dalian University of Technology, Dalian Liaoning 116024, China; 2. Department of Information Engineering, Zhengzhou Chenggong University of Finance and Economics, Zhengzhou 451200,China)
This paper presents a speed sensorless vector control algorithm based on the stator flux orientationSFO, which aims at eliminating the excessive dependence of the rotor field orientedRFOvector control system’s rotor parameters about AC induction motors. The algorithm uses the slip frequencyωsto directly control the torque component of the stator currentisqthroughPIregulator, observes the stator fluxψsby a kind of saturation limiter improved integrator and evaluates the rotor speed by means of model reference adaptiveMRASto achieve double-loop control of the motor. This paper carries out experiments under the conditions of low-speed, no load and load on large, medium and small capacity motor. Results show that the proposed control algorithm is suitable for a variety of capacity AC motor and the estimated rotor speed is consistent with the measured value, the system has good static and dynamic performance.
stator flux orientation; PI regulator; model reference; speed sensorless
1001-2265(2014)05-0100-03
10.13462/j.cnki.mmtamt.2014.05.025
2013-12-12;
2014-02-27
蘇亮亮(1988—),男,河南洛陽人,大連理工大學碩士研究生,研究方向為電機控制技術,嵌入式控制系統等,(E-mail)suliang310@126.com。
TH39;TG65
A
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23