齒輪抓取機械手運動學建模與仿真
2014-07-18 11:57:35仲冰冰張龍孟慶愛崔龍飛莊文許
機械制造與自動化 2014年2期
仲冰冰,張龍,孟慶愛,崔龍飛,莊文許
(南京理工大學 機械工程學院,江蘇 南京 210094)
齒輪抓取機械手運動學建模與仿真
仲冰冰,張龍,孟慶愛,崔龍飛,莊文許
(南京理工大學 機械工程學院,江蘇 南京 210094)
齒輪精整是利用數(shù)控精整沖床去除齒輪上毛刺以提高齒輪精度的一道工序,該工序需要將齒輪放置在沖床工作臺的指定位置,且具有較高的定位精度。為了實現(xiàn)生產的自動化,提高生產效率,減少因人工疲勞所導致的危險事故,設計了一種齒輪抓取機械手來代替人工完成齒輪的放置并保證定位精度。分析了機械手各個運動構件與末端執(zhí)行器在空間的位置關系,利用D-H法建立了機械手的坐標系,并在連桿坐標系簡圖的基礎上,利用齊次坐標變換對機械手進行運動學建模。為機械手的運動規(guī)劃和控制奠定基礎。
機械手;運動學;仿真
0 引言
工業(yè)機器人,又稱機械手,是在現(xiàn)代自動化生產設備中應用比較廣泛的機械裝置。它可以接受人類指揮也可以按照預先編排的程序運行,在現(xiàn)代化工業(yè)生產中扮演著重要角色,它被廣泛地應用到各種自動化生產線上,代替人做某些單調、重復、時間長或工作環(huán)境危險惡劣的作業(yè),如噴涂、沖壓、塑料制品成型、熱處理、焊接、以及在原子能工業(yè)部門搬運等操作。在許多工業(yè)生產中,由于機械手的運用,加工產品的品質和效率都得到了很大的提高,這是一次新的技術革命[1]。
齒輪抓取機械手用在某數(shù)控齒輪精整沖床上代替人工實現(xiàn)齒輪的抓取和放置,不僅可以保證齒輪放置位置的精度,而且可以提高工作效率,并可減少人工疲勞等原因導致的人身安全問題。本文以某項目的齒輪抓取機械手為科研背景,對其進行運動學和動力學建模與仿真,為機械手的設計和研制提供理論依據(jù),對工業(yè)機械手的發(fā)展具有重要的現(xiàn)實意義。其整體結構模型如圖1。

1—手爪;2—步進電動機;3—小臂;4—步進電動機;5—大臂;6—步進電動機;7—肩關節(jié);8—底座圖1 齒輪抓取機械手整體結構示意圖
1 運動學建模
1.1 機械手連桿變換矩陣及其乘積
D-H坐標系的建立:機器人是多連桿多自由度的機械系統(tǒng),為了便于對其進行研究分析,首先要討論相鄰連桿之間的運動關系。為了方便對機器人各桿件進行建模和分析,可以通過對關節(jié)鏈中的每一桿件建立坐標系進行。denavit和hartenberg于1955提出的D-H方法,其規(guī)則如下[2]:
1)zi坐標軸為沿著i+1關節(jié)的運動軸。
2)xi軸是沿著zi和zi-1的公垂線,指向遠離zi-1軸的方向。
3)yi軸的方向按構成xiyizi右手直角坐標系建立。
4) 公垂線長度ai是zi和zi-1兩軸間的最小距離,一般稱為ai連桿的長度。
5) 兩公垂線ai和ai-1之間的距離為連桿距離di。
6)xi軸與xi-1之間的夾角為θi,以繞zi軸右旋為正,一般稱θi為連桿的夾角。
7)zi軸與zi-1之間的夾角為ai,以繞xi軸右旋為正,ai稱為扭轉角。
1.2 機械手運動學方程
a) 建立各構件的D-H坐標系
根據(jù)運動學基礎分析和機械手的模型可得D-H坐標系如圖2所示,其桿件相應的參數(shù)見表1。為了在一個平面內計算,只計算到腕關節(jié)部分。
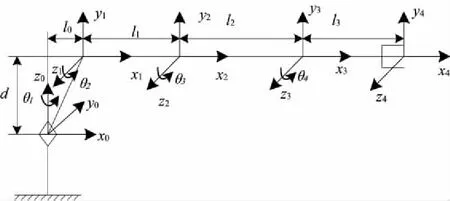
圖2 機械手D-H坐標系
b) 確定運動桿件的結構參數(shù)和運動變量
從圖2可以看出,各個關節(jié)的轉動變量都是繞著各自坐標系的z軸進行轉動,可得機構的結構參數(shù)和運動變量如表1。

表1 機械手的D-H坐標
1) 由此可寫出各相鄰桿件坐標系間的A矩
(1)
2) 建立機械接口坐標系的位姿矩陣T4
(2)
將式(1)代入式(2),按矩陣對應項相等,依據(jù)c23=cos(θ2+θ3)=c2c3-s2s3s23=sin(θ2+θ3)=c2s3+s2c3可得:
nx=c1c234ny=s1c234nz=s234
ox=-c1s234oy=-s1s234oz=c234
ax=s1ay=-c1az=0
px=l0c1+l1c1c2+l2c1c23+l3c1c234
py=l0s1+l1s1c2+l2s1c23+l3s1c234
pz=l1s2+l2s23+l3s234+d
(3)
式(3)即為機械手正運動學方程,它描述了機器人末端執(zhí)行器相對于基準坐標系的位姿。
已知夾爪的姿態(tài)后,確定姿態(tài)角。把夾爪所在的坐標系(n,o,a)相對于基礎坐標系 (x,y,z)的變化:繞x軸旋轉的角稱為偏轉角,用yaw表示;繞y軸旋轉角稱為俯仰角,用pitch表示;繞z軸旋轉角稱為橫滾角,用roll表示,可得:
(4)
2 運動學仿真
2.1 機械手模型構建
MATLAB工具箱Robotics Toolbox可方便地對機器人進行運動學仿真,在仿真過程中,不僅可以直觀地查看機器人的運動情況,還可將所需的數(shù)據(jù)以圖形顯示出來。其仿真步驟如下[3-4]:
1) 創(chuàng)建名為picking robot的M文件,利用link()函數(shù)輸入表1所提供的采摘機器人桿件參數(shù),link()函數(shù)調用格式為:L1=link([α、l、θ、d0]),最后一個為0(旋轉關節(jié))或1(移動關節(jié));
2) 構建名為picking robot的機器人,r.name=’picking robot’;
3) 調用drivebot()命令,運行該程序,可得到機器人的三維位姿仿真圖和控制界面圖。通過在控制界面圖上輸入各關節(jié)角度來驅動機器人運動,顯示各種運動位姿。
本文根據(jù)機械手實際工作要求,其設計變量為h=100mm,d=126mm,l0=38.6mm,l1=180mm,l2=136mm,l3=103.65mm。由機械手的D-H坐標系和設計變量可構建機械手的模型如圖3所示。

圖3 機械手仿真模型與控制面板
2.2 機械手運動仿真
根據(jù)機械手的工作要求,要抓取的齒輪的初始位置到終止位置上升高度為45mm,兩點圍成90°圓弧,以圓弧原點為中心在水平面內橫縱長度分別為403mm和351.6mm,為了提升生產效率,要求從起始點到終止點的工作時間為2s。本文以腰關節(jié)中心為坐標原點,要求腰關節(jié)旋轉90°,末端執(zhí)行器上升45mm。根據(jù)工作要求的初始位姿和終止位姿,可以得到機械手各個關節(jié)的角度變化曲線如圖4,圖5,圖6,圖7所示。

圖4 關節(jié)1角度變化曲線
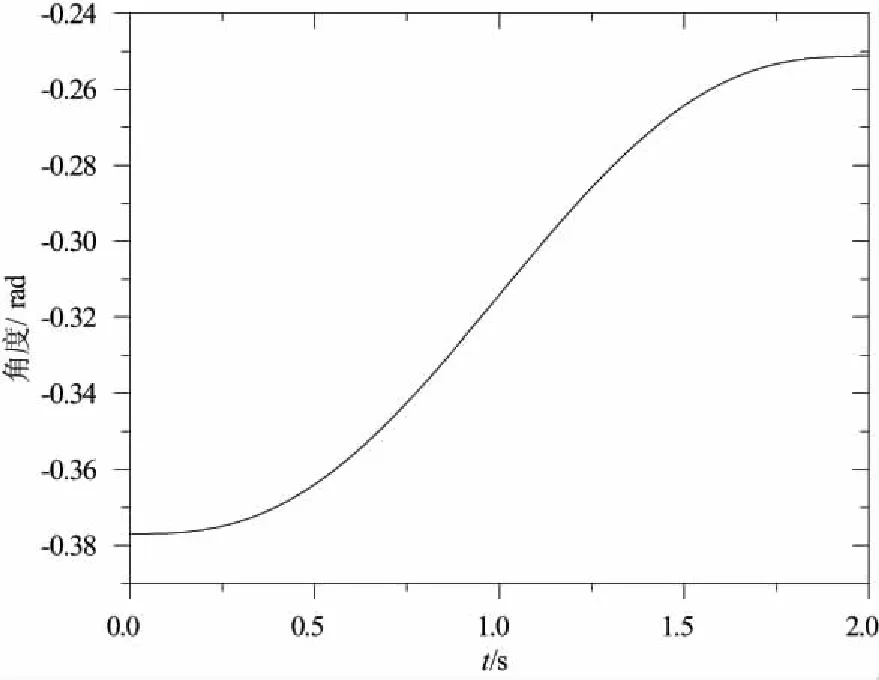
圖5 關節(jié)2角度變化曲線
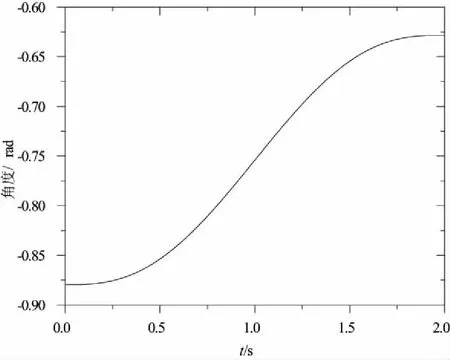
圖6 關節(jié)3角度變化曲線
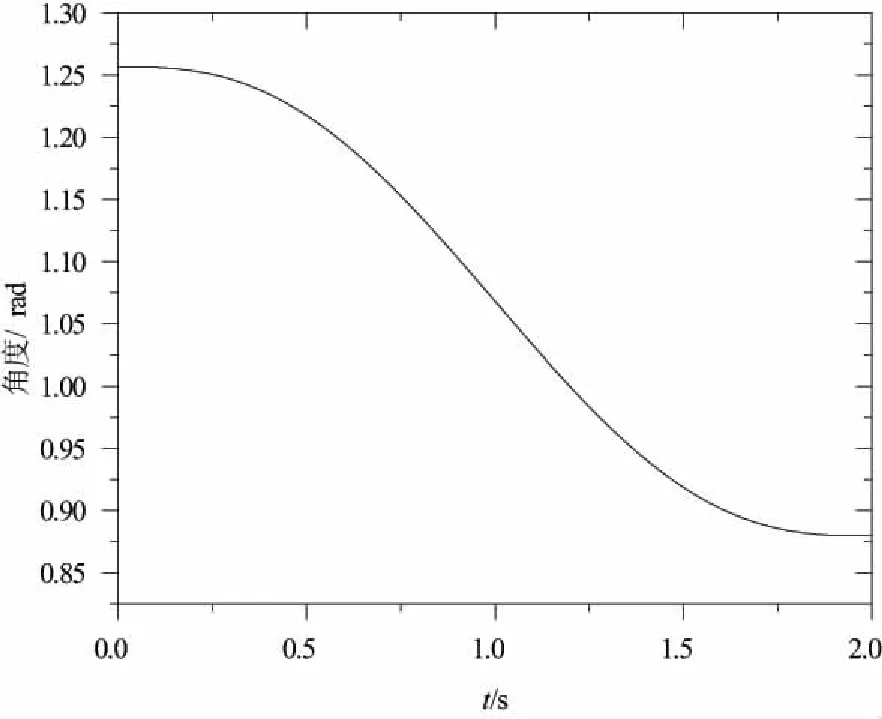
圖7 關節(jié)4角度變化曲線
從圖4~圖7可以看出各個關節(jié)角度變化曲線可以看出各關節(jié)能夠平穩(wěn)地從初態(tài)運動到末態(tài),可以很好的避免由于位置突變導致各關節(jié)力矩過大,影響機械手放置齒輪的位置精度。
3 結語
本文對齒輪抓取機械手的運動學作了研究,通過對機械手建立D-H坐標系,得到其運動學模型。利用matlab中的機器人工具箱完成了機械手模型的構建和運動仿真,為機械手運動的規(guī)劃和控制奠定了基礎。
[1] 石煒,郗安民,張玉寶.基于凱恩方法的機器人動力學建模與仿真[J].機器人技術, 2008.
[2] 蔡自興. 機器人學[M](第二版). 北京:清華大學出版社,2009.
[3] 羅家佳,胡國清.基于MATLAB的機器人運動仿真研究[J].廈門大學學報,2005,44(5):642-644.
[4] Corke P.A Robotics Toolbox for Matlab[J].IEEE Robotics and Automation Magazine,1996,3(1):24-32.
Gear Crawling Robot Kinematics Modeling and Simulation
ZHONG Bing-bing,ZHANG Long,MENG Qing-ai,CUI Long-fei,ZHUANG Wen-xu
(Shool of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
Gear finishing is the procedure in which NC working punching machine is used to remove the gear burrs etc, but the gears need to be accurately placed at the appointed position of the punching worktable. To realize the production automation, boost productivity and reduce the accident caused by tiredness, a gear finishing robot is designed to replace workers to complete the gear placing and guarantee the positioning accuracy. In order to study the dubiety between each moving elements and the hand of the robot in the space, D-H method is used to get the kinematic modeling. Based on the con-rod coordinate system sketch, the homogeneous coordinate transformation is used to solve the positive problem of robot kinematics,which lays the foundation for the trace programming and simulation later.
robot;kinematics;simulation
仲冰冰(1987-),男,碩士研究生,研究方向為機械設計及理論。
TP241;TP391.9
A
1671-5276(2014)02-0153-03
2013-01-07
