模糊神經網絡PID控制在振動打樁機中的應用
2014-07-18 11:57:39彭陽陽湯炳新葛旭峰伏廣臣
機械制造與自動化 2014年2期
彭陽陽,湯炳新,葛旭峰,伏廣臣
(河海大學 機電工程學院,江蘇 常州 213022)
模糊神經網絡PID控制在振動打樁機中的應用
彭陽陽,湯炳新,葛旭峰,伏廣臣
(河海大學 機電工程學院,江蘇 常州 213022)
針對雙馬達電液伺服系統難以進行同步控制,實現無級調頻調矩的問題,提出了基于Mamdani型的模糊神經網絡PID控制方法。該方法的主要思想是結合模糊推理和神經網絡控制技術,構成模糊神經網絡,實時調整PID參數。實驗結果表明:與傳統PID控制方法相比,該方法改善了系統的動態特性,提高了控制精度。
模糊神經網絡;雙馬達電液伺服系統;同步控制
0 引言
應近幾年國內基礎行業的建設需要,如高層住宅、鐵路、高速公路、橋梁、碼頭、電站等大、中型基礎工程施工及地基處理,性能良好的振動打樁機的作用也越來越明顯。 由于國內振動樁錘理論和打擊力的無級調頻調矩技術落后,如今的振動打樁產品已經無法滿足市場的需求。
本文提出將模糊神經網絡PID控制法用于偏心塊式振動打樁機中,利用其模糊推理和自學習功能,以減小液壓系統的泄漏,執行元素非線性等因素影響,達到提高同步控制精度的目的。
1 雙馬達電液伺服同步控制系統以及同步控制策略[1-2]
雙馬達電液同步控制系統如圖1所示,微機控制器1、伺服放大板2和3、傳感器13和14、開關按鈕組25、數據采集卡26組成了電控柜系統;泵4和24、閥5和22、馬達6和21、散熱器23組成了液壓系統;其他組成了機械結構系統即打樁頭內部結構。
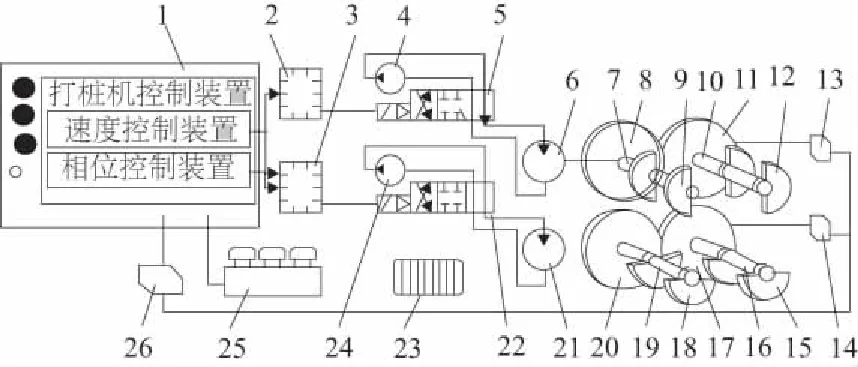
圖1 雙馬達電液伺服系統結構圖
工作原理如下:馬達6和21驅動兩組反向偏心塊9、12和15、18。兩馬達同時旋轉,兩組偏心塊反向旋轉,橫向離心力抵消,垂直方向力疊加,從而產生打擊力。在整個沉樁過程中,兩馬達轉速實現打擊力頻率改變,偏心塊之間的相位差實現打擊力矩的改變。
本文采用了復合式同步控制策略,速度的控制由內層控制器實現,外層采用主從式控制相位差。圖2為控制策略方框圖。
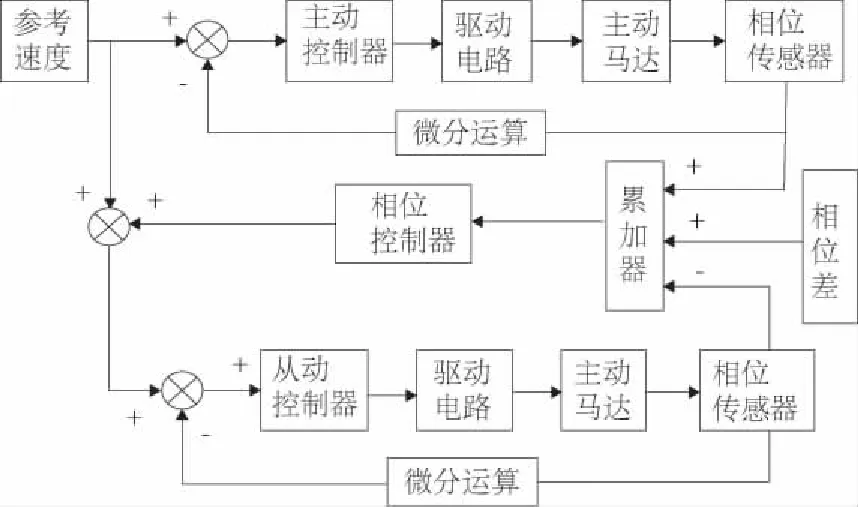
圖2 同步控制系統方框圖
2 模糊神經網絡PID控制
模糊神經網絡PID控制是在常規PID控制基礎上,根據實際情況利用經驗和技術知識進行學習,通過計算系統的誤差和誤差的變化率,在線實時的整定PID參數。具體基于模糊神經網絡PID控制結構如圖3所示。

圖3 模糊神經網絡PID控制結構圖
2.1 模糊神經網絡結構原理
神經網絡系統具有很強的自學習自適應功能[3],但卻不適合表達基于規則的語言;模糊推理能夠對控制規則進行計算推理,但本身不具備自學習自調整的功能。因此,將兩者結合起來,模糊神經網絡可以利用神經網絡的學習機制補償模糊控制系統缺乏有效的學習機制的缺點。
2.2 模糊神經網絡的結構
基于Mamdani模型的模糊神經網絡結構[4]如圖4所示。
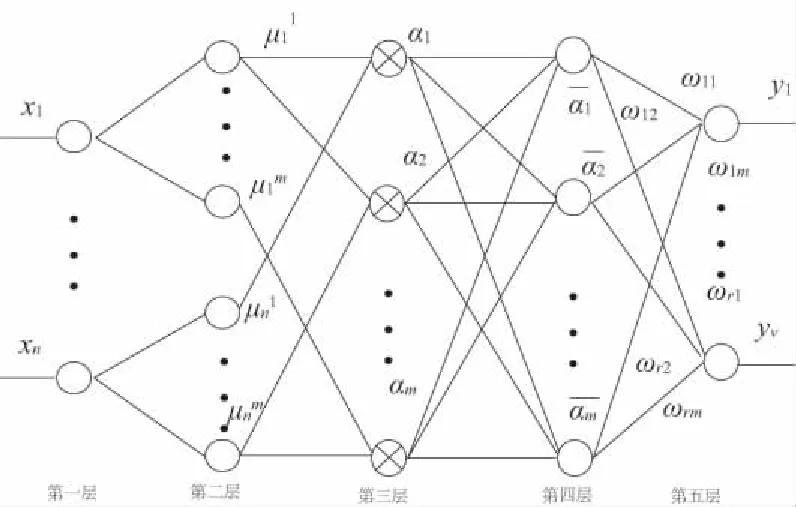
圖4 基于Mamdani模型的模糊神經網絡結構圖
第一層:輸入層,輸入值傳輸到下一層。節點總數為:N1=n。
第三層:模糊推理層,每個節點代表一條模糊規則。該層的作用是匹配模糊規則的前件,計算出每條規則的適應度,即:
式中:i1∈{1,2,…,m1};i2∈{1,2,…,m2};…;in∈{1,2,…,mn};j=1,2…,m;模糊規則總數為:
第四層:歸一化層,起歸一化作用,即:
節點總數為:N4=N3=m
第五層:輸出層,作用是清晰化,即:
節點總數為:N4=r;ωij相當于上面所述的隸屬函數的中心值。
2.3 模糊神經網絡的學習方法






得出參數調整的學習算法為:
學習速率β>0。
由以上可知誤差e和誤差ec是輸入量處于神經網絡的第一層,△Kp,△Ki,△Kd是其輸出量所處第五層輸出層。在本次實驗中,液壓馬達額定轉速2000r/min,所以e的基本論域為【-220rad/s,220rad/s】,ec的基本論域【-440rad/s。440rad/s】。經ZN法整定PID參數后,由模糊神經網絡自學習和推理計算功能計算出PID參數變化量,獲得精確的被控對象輸入量。
3 實驗結果與分析
對于不同的土壤,打樁機為了達到良好的沉樁效果,需要不斷地調整激振器頻率與激振力大小。為了模仿實際工作環境,假設雙馬達保持1500r/min不變,相位差在t=8s時從0°變化到180°,用PID控制和模糊神經網絡PID控制分別對打樁機在沙土的環境下進行實驗,實驗結果如圖5。
從上面實驗結果可以看出:兩種控制方法都能達到一定控制性能,但模糊神經網絡能更好的跟蹤速度的變化,且速度波動曲線比較平穩,在相位差突變時系統的動態性能的控制也明顯優于PID控制,也就是說模糊神經網絡PID控制的抗干擾能力更強。

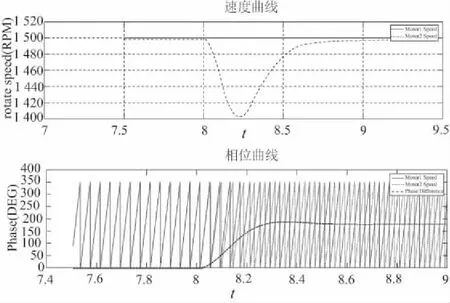
圖5 模糊神經網絡PID控制
4 結論
模糊神經網絡PID控制具有調整過程平穩,跟蹤效果好,能夠根據雙馬達液壓伺服系統實時工況下進行控制參數的在線調整,滿足了高精度同步控制要求。
[1] 王玥,趙偉民,付海龍,等.振動打樁機偏心塊的參數研究與有限元分析[J].機械工程師,2005(7):132-134.
[2] 湯炳新,王小虎,麻岳軍,等.基于復合式同步控制策略和模糊PID控制算法的振動打樁機的智能控制器研究[J],機械工程學報,2011(12):2798-2801.
[3] 孫增圻.智能控制理論與技術[M].北京:清華大學出版社,2002:169-175.
[4] Takagi T Sugeno.Fuzzy identification of System and its application to modelling and contol[J].IEEE Trans Syst,Man and Cybern,1985,15(1):116-132.
Application of Fuzzy Neural Network PID Control in Vibration Pile Driver
PENG Yang-yang, TANG Bing-xin,GE Xu-feng, FU Guang-chen
(Hohai University Mechanical and Electrical Institute, Changzhou 213022, China)
The electro-hydraulic servo system with double motors is hard to be controlled synchronously and to be used to regulate the frequency and moment.this paper puts for ward a fuzzy neural network PID method based on Mamdani The main idea of the new approach is to constitute the fuzzy neural network with the real-time adjustment of PID control parameters through combining fuzzy reasoning with neural network control technology.Experimental results show that compared with the traditional PID control method,the proposed control method greatly improves the dynamic performance of the system and the control precision。
fuzzy neural network;electro-hydraulic servo system with double motors; synchronous control
水利部公益性行業科研專項(20071033)
彭陽陽(1987-)男,江蘇南通人,碩士研究生,研究方向為機械檢測與控制。
TP273+.4
B
1671-5276(2014)02-0126-02
2013-02-04
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
能源工程(2020年6期)2021-01-26 00:55:22
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
