自適應數字濾波技術在光纖陀螺SINS中的應用*
2014-07-18 11:03:33阮雙雙
傳感器與微系統 2014年4期
于 飛, 阮雙雙
(哈爾濱工程大學 自動化學院,黑龍江 哈爾濱 150001)
應用技術
自適應數字濾波技術在光纖陀螺SINS中的應用*
于 飛, 阮雙雙
(哈爾濱工程大學 自動化學院,黑龍江 哈爾濱 150001)
光纖陀螺捷聯慣導系統(SINS )對外界環境極為敏感,系統的輸出信號中含有復雜的高頻隨機噪聲,此噪聲將導致系統的長時間導航精度較差。要進一步提升導航系統的精度,必須使用更為有效的濾波技術對器件的輸出噪聲做處理。傳統的數字濾波器采用先驗固定截止頻率,它往往與實際截止頻率存在偏差。為了更加有效地消除器件的高頻噪聲,提出一種基于穩態隱馬爾科夫模型卡爾曼濾波器(HMM/KF)的自適應數字濾波設計方法,并用此方法設計的自適應數字濾波器處理光纖陀螺的原始輸出信號,從而高效濾除陀螺儀輸出信號中的高頻隨機噪聲。
捷聯慣性導航系統; 自適應數字濾波器; 自適應截止頻率; 隱馬氏卡爾曼濾波器
0 引 言
不論是在靜態還是在系泊環境下,光纖陀螺捷聯慣導系統(strap-down inertial navigation system,SINS)的慣性測量單元(inertial measurement unit,IMU)都會受到各種隨機噪聲的干擾,在長時間工作的SINS中,器件的高頻隨機噪聲將一直影響系統的導航精度。為了消除隨機噪聲對慣導系統的影響,通常采用低階平滑濾波器對光纖陀螺和加速度計的輸出信號做處理[1,2]。隨著國防工業對慣導系統高精度、低成本、高可靠性、易維護性的要求越來越嚴格,采用更有效的濾波技術消除慣性器件的輸出高頻噪聲將勢在必行[3,4]。傳統的IIR數字濾波器和FIR數字濾波器的截止頻率都采用先驗固定值,通過分析慣性測量元件輸出信號的頻譜特性得到,與實際頻率之間存在偏差[5]。
本文利用穩態隱馬爾科夫模型卡爾曼濾波器(HMM/KF)和數字濾波器的等效關系,將HMM/KF的穩態參數反饋到數字濾波器中,為數字濾波器選取自適應截止頻率,從而更有效地消除慣性測量元件輸出信號中的高頻隨機噪聲。
1 HMM/KF 濾波模型
隱馬爾科夫模型(hidden Markov model,HMM)是一類統計模型,它包括一個不被直接觀測的馬爾科夫過程和一個與之相關的觀測過程[6]。將HMM引入傳統的卡爾曼濾波過程中,構建HMM/KF濾波方程,可以快速穩定地濾除輸出信號的高頻噪聲。HMM作為一種強大的數學統計分析模型,已得到非常廣泛的應用,在圖像識別、手語識別、交通檢測系統、頻率跟蹤、濾波、雷達目標識別,以及噪聲環境下的語音識別等領域都取得了較好的效果[7,8]。
采用二維HMM對慣性器件輸出建模,取HMM/KF的狀態向量Xk和量測向量Zk為如下模型[6]
(1)
式中xk為載體真實角速度,zk為光纖陀螺陀螺輸出的角速度。
HMM/KF的狀態方程和量測方程為

(2)
通過對二階HMM/KF系統的分析,可獲得狀態轉移概率矩陣和量測概率矩陣
Fk/k-1=Hk=I.
(3)
陀螺的系統噪聲方差陣和量測噪聲方差陣依次為
Q=diag{q11,q22},
R=diag{r11,r22}.
(4)
HMM/KF濾波的5個基本方程為
(5)
2 自適應截止頻率的計算
HMM/KF濾波達到穩態時,系統的狀態估計均方誤差矩陣和濾波增益矩陣均為常值矩陣


(6)
將式(6)代入式(5)Pk/k-1和Kk的表達式中得

(7)
xk+1=(1-k11)xk+k11zk+1.
(8)
其中,k11=r22(p11+q11)。
將式(8)中的xk和zk+1分別用y(k)和x(k+1)代替可得
y(k+1)=(1-k11)y(k)+k11x(k+1).
(9)
對上式做z變換,系統的傳遞函數為

(10)
對式(10)做離散傅里葉變換,令Z=ejω
(11)
由式(11)可計算出等效數字濾波器的截止角頻率為

(12)
因此,該自適應截止頻率為

(13)
式(13)是數字濾波器的自適應截止頻率的計算公式,將其引入所設計的IIR和FIR數字濾波器中,就可有效消除慣性器件輸出信號中的高頻隨機噪聲。
該方案的流程圖如圖1。

圖1 基于HMM/KF的自適應數字濾波模型Fig 1 Adaptive digital filtering model based on HMM/KF
3 自適應數字濾波器的設計
數字濾波器分為有限脈沖響應數字濾波器(FIR濾波器)和無限脈沖響應濾波器(IIR濾波器)。FIR濾波器(也稱非遞歸濾波器)僅取決于過去的輸入,而與過去的輸出無關,其差分方程為
(14)
因為濾波器的輸出不依賴于以前的輸出,所以,這種濾波器的脈沖響應為有限項。
FIR濾波器的脈沖響應為
(15)
FIR濾波器通過對理想濾波器頻率特性作某種近似設計,本文選用窗函數法來近似設計FIR濾波器。根據光纖陀螺輸出信號中的噪聲特性,選取漢寧窗設計有自適應截止頻率的FIR濾波器,漢寧窗的函數形式如下
(16)
圖2是不同階數的FIR濾波器的幅頻特性曲線。

圖2 不同階FIR濾波器的幅頻特性Fig 2 Amplitude-frequency characteristics of FIR filter with different orders
分析圖2可得,40階FIR濾波器的幅頻特性曲線在過渡帶內比較陡,阻帶幅值迅速趨向0,濾波性能比較好,因此,本文取40階FIR濾波器為基礎濾波器,將自適應截止頻率代入基礎濾波器中得到自適應FIR濾波器。
IIR濾波器(也稱遞歸濾波器)不僅需要過去和現在的輸入,還需要過去的輸出。濾波器的差分方程為

(17)
IIR濾波器通常采用模擬濾波器進行設計,考慮到巴特沃斯濾波器在通頻帶內的頻率響應曲線最大限度平坦,且阻頻帶內頻率響應逐漸趨于0,濾波效果較好,本文將選取巴特沃斯濾波器為模型設計有自適應截止頻率的IIR濾波器。
圖3給出了不同階數的IIR濾波器的幅頻特性。

圖3 不同階IIR濾波器的幅頻特性Fig 3 Amplitude-frequency characteristics of IIR filter with different orders
對比圖2和圖3,IIR濾波器可用比FIR濾波器低很多的階數來滿足指標要求,因為IIR濾波器的輸出對輸入存在反饋。考慮濾波器的延遲特性和濾波器的穩定性,取4階IIR濾波器為基礎濾波器,將HMM/KF穩態參數計算的自適應截止頻率反饋到基礎濾波器中獲得自適應IIR濾波器。
IIR濾波器由于階數比較低,因而,所用的存儲單元和運算次數少,較為經濟。FIR濾波器具有嚴格的線性相位,且穩定性也比IIR濾波器好。在實際應用中,可以根據系統的具體要求,從多方面考慮加以選擇。
4 仿真與分析
在Matlab平臺上進行仿真,對實驗室靜態條件下光纖陀螺輸出的數據進行濾波,陀螺輸出數據的頻率為1/98 Hz,數據長度為120 s,陀螺的原始輸出信號如圖4。
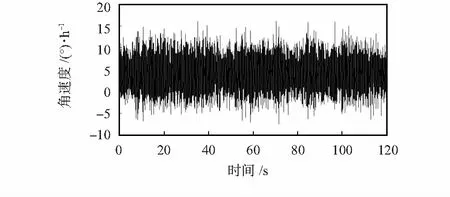
圖4 陀螺靜態原始輸出Fig 4 Static original output of FOG
根據光纖陀螺的原始信號可以計算出信號的均方根值(root mean square,RMS)為10.11°/h。RMS的大小可以反映出疊加在信號中的隨機高頻噪聲的強弱,RMS越小,光纖陀螺的輸出信號越接近于真實信號,隨機噪聲也越弱。
首先采用四階平滑濾波器對采樣數據進行濾波,其濾波結果如圖5。

圖5 平滑濾波結果Fig 5 Result of smooth filtering
圖5中的毛刺是由器件隨機噪聲引起的,計算四階平滑濾波器濾波后的信號的RMS為3.950 5°/h,比原始信號的RMS小,說明該濾波器能初步抑制慣性測量元件輸出信號中的高頻隨機噪聲。
下面將利用本文所設計的自適應IIR濾波器和FIR濾波器對同一組光纖陀螺的原始輸出信號進行濾波。
引入自適應截止頻率后的四階巴特沃斯IIR濾波器的濾波結果如圖6。
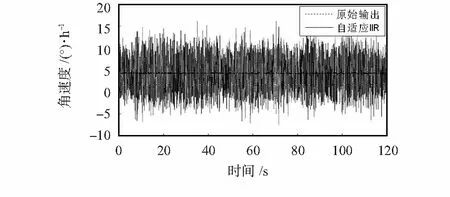
圖6 四階IIR濾波器的濾波結果Fig 6 Filtering result of fourth-order IIR filter
自適應IIR濾波器輸出信號的RMS值為0.494 2°/h,與平滑濾波器相比顯著減小,驗證了此自適應IIR濾波器對高頻噪聲的抑制效果明顯。
引入自適應截止頻率后的40階漢寧窗FIR濾波器的濾波結果如圖7。
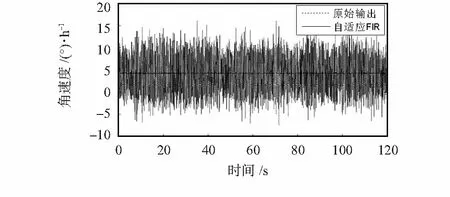
圖7 40階FIR濾波器的濾波結果Fig 7 Filtering results of 40 order FIR filter
圖7中,自適應FIR濾波器輸出信號的RMS值為0.369 8°/h,與圖6中對應的自適應IIR濾波相比略有優勢;但是圖7中對應的自適應FIR濾波器到達濾波穩態的時間比較長,約為3s,而圖6中對應的自適應IIR濾波器穩態時間為1.8 s。仿真結果驗證了本文所設計的2個自適應濾波器可行性與實用性,它們可以有效地去除慣性器件輸出信號中的高頻噪聲,且濾波器的截止頻率可以隨噪聲統計特性的變化自動做出調節。
為了進一步驗證自適應截止頻率對系統噪聲和量測噪聲的自動調節能力,設HMM/KF濾波參數Q和R分別為
Q=diag{(q×0.005°/h)2,(q×0.005°/h)2},
R=diag{(r×0.01°/h)2,(r×0.01°/h)2}.
通過逐漸改變r和q的值,觀察濾波增益和截止頻率的變化。表1和表2說明,不同的系統噪聲和量測噪聲對應的數字濾波器截止頻率不同,如果一味地采用先驗截止頻率值設計濾波器,必將影響濾波效果。因此,本文提出的自適應截止頻率下的數字濾波器是很有實際應用價值的,而且簡單方便。
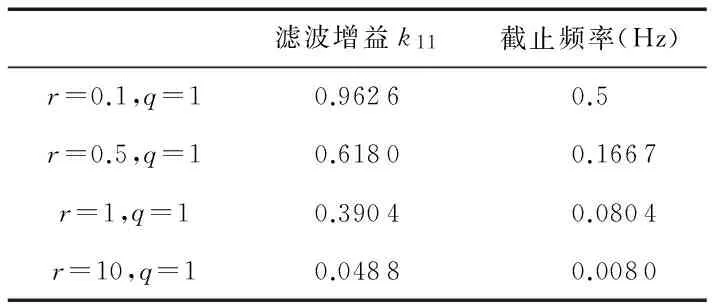
表1 不同r下的濾波增益和截止頻率值Tab 1 Filtering gain and cut-off frequency with different r
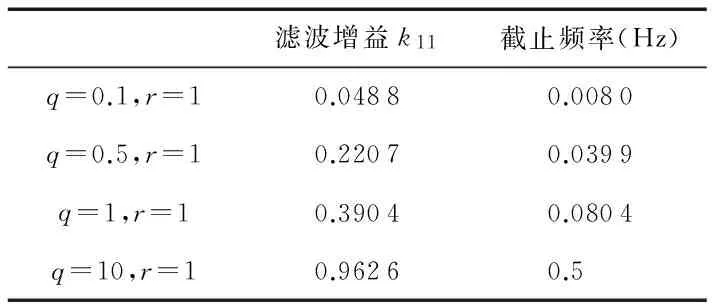
表2 不同q下的濾波增益和截止頻率值Tab 2 Filtering gain and cut-off frequency with different q
5 結 論
本文主要針對光纖陀螺SINS中測量元件原始輸出信號的高頻隨機噪聲,引入穩態HMM/KF的參數為數字濾波選取自適應截止頻率,該頻率可隨系統噪聲統計特性的變化而自動調節大小,從而使自適應數字濾波器更有效的消除高頻噪聲對系統精度的影響。仿真結果驗證:本文所設計的自適應數字濾波器可顯著的提高濾波精度,對慣性器件的輸出高頻噪聲有很好的抑制效果,且濾波器設計過程簡單,可用于光纖陀螺SINS的數據預處理階段,提高系統的導航定位精度。
[1] 付強文.光纖陀螺捷聯慣導系統中的誤差分析與補償[D].西安:西北工業大學, 2005.
[2] 汪順亭,鄧 政.開環光纖陀螺儀特點及應用[J].中國慣性技術學報,2006,14(4):93-96.
[3] 李漢舟,劉幼平,楊世超.數字濾波器在慣性測量裝置中的應用[J].中國慣性技術學報,2003,11(1):34-41.
[4] 陳江良,陸志東.基于Matlab的數字濾波器設計及其在捷聯慣導系統中的應用[J].中國慣性技術學報,2005,13(6):10-12.
[5] 郭中華,董 涌,房衛東,等.基于Matlab的FIR數字濾波器設計與仿真[J].寧夏工程技術,2004,3(1):77-81.
[6] 曹 通.基于HMM/KF濾波的捷聯慣組快速標定方法研究[J].控制與決策,2012,27(4):1-4.
[7] Elliott Robert J,Aggoun Lakhdar,Moore John B .Hidden Markov models:Estimation and control[M].Berlin,Germany:Mathema-tics Subject Classifications,1991.
[8] Winters-Hilt S,Zuliang J.A hidden Markov model with binned duration algorithm[J].IEEE Transactions on Signal Processing,2010,58(2):948-952.
Application of adaptive digital filtering technology in optical fiber gyro SINS*
YU Fei, RUAN Shuang-shuang
(College of Automation, Harbin Engineering University, Harbin 150001,China)
The output signal of optical fiber gyroscope strap-down inertial navigation system(SINS) contains high frequency random noise as the system is sensitive to its environment,thus yielding poor long-term narigation precision.To further improve navigation precision,more effective filtering technology is needed to process output noise of device.Traditional digital filter utilize the fixed cut-off frequency which will have a deviation to its real value.In order to eliminate high frequency noise of devices effectively,a filter design method which based on HMM/KF is proposed,and the adaptive digital filter designed by this method are utilized to process original output signal of optical fiber gyro,so high frequency noise of gyro is significantly eliminated.
strap-down inertial navigation system(SINS); adaptive digital filter; adaptive cut-off frequency; hidden Markov model Kalman filter(HMM/KF)
2014—01—14
高等學校博士學科點專項科研基金資助項目(20102304110021)
U 666.1
A
1000—9787(2014)04—0154—04
于 飛(1974-),男,教授,博士研究生導師,主要從事系統建模與仿真,載體姿態及運動參數測量技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
