基于機器視覺的鋼軌輪廓測量方法研究*
2014-07-18 11:03:30徐晉卿陳唐龍
傳感器與微系統 2014年4期
徐晉卿, 陳唐龍, 占 棟, 于 龍, 馮 超
(西南交通大學,四川 成都 610031)
基于機器視覺的鋼軌輪廓測量方法研究*
徐晉卿, 陳唐龍, 占 棟, 于 龍, 馮 超
(西南交通大學,四川 成都 610031)
鋼軌輪廓檢測是軌道幾何參數檢測的重點和難點。采用二維平面靶標對激光攝像傳感器進行標定,建立世界坐標系和圖像坐標系的標定模型。通過棋盤格進行實驗標定,獲取300組數據,采用非線性最小二乘法來標定模型參數。結果表明:采用非線性最小二乘法能夠將棋盤格水平和垂直的測量誤差控制在0.3 mm左右,該方法能夠很好地運用到鋼軌輪廓測量中。
機器視覺; 鋼軌; 輪廓; 標定
0 引 言
鐵路鋼軌是支撐列車運行的重要基礎設施[1~3],高速鐵路軌道在投入運營前,都需對鋼軌進行高精度檢測。同時鐵路運行的速度高、載重量大、運行環境復雜,對鋼軌質量提出更加嚴格的要求。鋼軌良好的狀態對確保列車安全行駛、改善鋼軌及機車車輛相互作用和影響以及延長鋼軌部件和機車車輛使用壽命等都有重要的作用。因此, 采用合理的檢測方式,確保鋼軌狀態良好,有重要的意義[4]。
鋼軌輪廓測量是軌道檢測的重要內容,目前非接觸式測量在國內得到廣泛的應用。本文運用基于計算機視覺的鋼軌輪廓測量方法,開發了非接觸式鋼軌輪廓檢測系統。采用面陣相機、激光器等模塊化硬件設計和圖像處理軟件將輪廓從圖像坐標轉換到世界坐標,滿足實時檢測的要求。該系統具有較強的容錯性、適應性及可移植性[5],目前已在杭州地鐵二號線進行前期調試, 獲得良好的評價。
1 測量原理
1.1 攝像機傳感器測量模型
攝像機傳感器測量模型如圖1所示。
攝像機的圖像坐標系為OEXEYE,XE和YE分別為圖像坐標系的水平和垂直方向,o為攝像機光心,過點o作直線oz垂直于圖像坐標系平面,o1o為攝像機焦距,oz為攝像機光軸,建立攝像機坐標系oxyz;同理,建立世界坐標系owxwywzw。
1.2 建立圖像坐標系和世界坐標系的關系
本文鋼軌輪廓測量是采用光切面法,需要首先建立圖像坐標系和攝像機坐標系的關系[6],如式(1)所示
(1)
其中,α,β分別為攝像機像元在XE軸、YE軸的比例因子,(u0,v0)為攝像機主點,(α,β,u0,v0)為攝像機內部參數[7]。

圖1 攝像機傳感器測量模型Fig 1 Measurement model of camera sensor
其次,攝像機坐標系和世界坐標系的關系為
(2)
式中R,t分別為攝像機坐標系到世界坐標系的旋轉矩陣和平移向量,即為攝像機外部參數,于是有
(3)
由于測量的方法是光切面法,世界坐標系只有2個自由度,即參數zw=0,于是式(3)就轉換為式(4)
(4)
在實際的應用中,相機鏡頭存在不同程度的畸變,設畸變后的像素坐標為(XB,YB),如式(5)所示。圖像中心像素坐標為(X,Y),X,Y,Z定義如式(6)所示。攝像機主點坐標(u0,v0)一般作為已知參數給出,畸變偏移量δX(X,T),δY(X,Y)如式中(7)所示
(5)
(6)
(7)
式中k1,k2為徑向畸變系數,p1,p2為薄棱畸變系數,s1,s2為偏心畸變系數。
1.3 參數求解方法
若要建立圖像坐標系和世界坐標系之間的關系,就需要求取參數(a1,a2,…,a8,k1,…,s2),則本文采用非線性最小二乘法求解,于是建立式(8)、式(9)
(8)
(9)
即要求解參數(a1,a2,…,a8,k1,…,s2),就需使I的值為最小。首先令(k1,…,s2)=0,求出此時(a1,a2,…,a8)的值,然后將(a1,a2,…,a8)作為已知條件,求解(k1,…,s2)的值。同理,依次迭代300次,能夠得到300組(a1,a2,…,a8,k1,…,s2),最后通過曲線擬合,得到精確的結果。
2 系統設計
2.1 系統硬件
系統硬件主要包括:面陣相機、激光器、工業控制計算機、軌檢梁。
1)面陣相機
面陣相機是一種集光電轉換、電荷儲存、電荷轉移為一體的傳感器件[8],能夠實時地拍攝圖像。基于系統測量精度要求,本文采用北京微視公司MVC1400攝像機,其圖像分辨率為1280×1024;同時采用Kowa公司的LM12NCL鏡頭,焦距為12 mm。
2)激光器
由于軌道檢測系統工作在室外,既有在隧道內進行檢測,也有在露天條件檢測,且在時間上也有白天和晚上的區別,所以工作環境極其復雜。因此,選擇合適激光光源,在鋼軌輪廓檢測系統具有重要的意義。本文采用德國Z—Laser激光器,激光線寬小于0.2 mm。
3)工業控制計算機
工業控制計算機是專門用于工業生產中進行監測與控制的計算機,其經常在環境比較惡劣的環境下運行,所以,工控機通常會進行加固、防塵、防潮、防腐蝕、防輻射等特殊設計。本文采用華南工控機。
4)軌道檢測梁
軌道檢測梁是用于安裝激光攝像機傳感器的大型的支架,它安裝于軌道檢測車的轉向架上,
2.2 系統軟件
軟件系統主要包括鋼軌輪廓視頻采集、圖像處理和人機交互三部分。輪廓視頻采集部分主要負責獲取視頻圖像;圖像處理部分主要是對獲取的圖像進行處理,得到鋼軌輪廓曲線和輪廓中心線;人機交互部分主要負責將測量的結果顯示和保存,為工作人員科學決策提供直觀的依據。
軟件部分工作流程如圖2所示,攝像機采集的圖像傳輸給計算機的圖像處理系統,經系統處理后,將處理的結果顯示在人機交互界面。
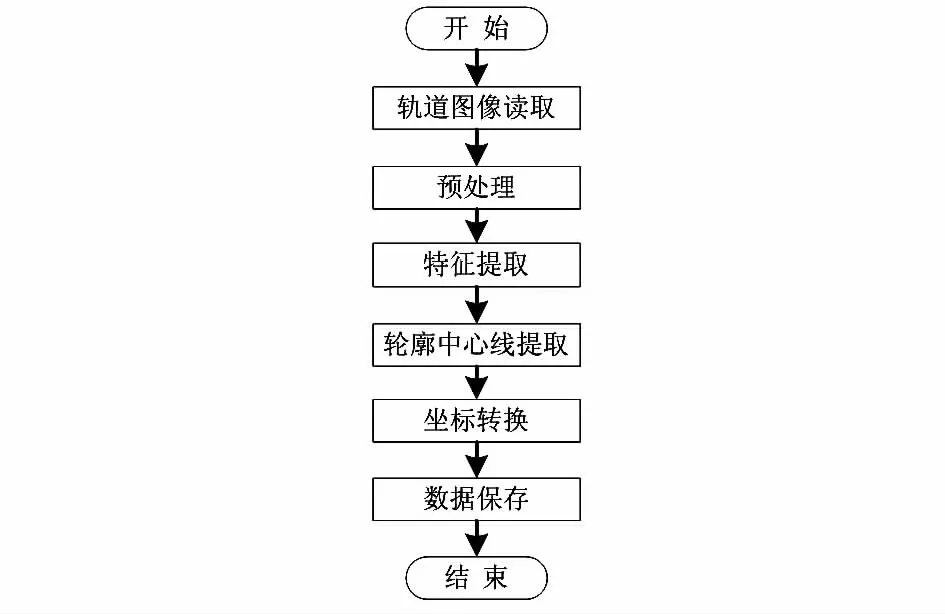
圖2 軟件工作流程Fig 2 Software working process
3 驗 證
3.1 標 定
3.1.1 棋盤格標定
采用黑白棋盤格作為實驗標定板,通過不過方位的棋盤格對激光傳感器進行標定[9],得到圖3。
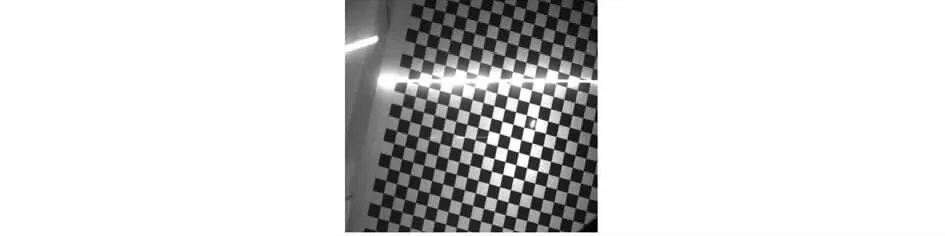
圖3 棋盤格Fig 3 Checkerboard
對圖3進行人工像素提取,取出300組標定數據,如圖4所示,(XE,YE)是對應棋盤格像素坐標,(xw,yw)是其世界坐標系坐標。

圖4 (XE,YE),(xw,yw)坐標Fig 4 (XE,YE),(xw,yw)coordination

圖5 (a1,a2,…,a8)收斂曲線Fig 5 (a1,a2,…,a8)convergence curve

圖6 (k1,…,s2)收斂曲線Fig 6 (k1,…,s2)convergence curve
采用上述非線性最小二乘法迭代300 次[10,11], 發現隨著迭代次數的增加,(a1,a2,…,a8)和(k1,…,s2)分別趨于一值,將此值作為非線性最小二乘法的解,求解結果如圖5、圖6所示。
3.1.2 誤差分析
為驗證非線性最小二乘法的標定精度,采用逆向方法,將所得的300組像素坐標(XE,YE)代入該算法的標定模型,求得其世界坐標系的坐標值(xw1,yw1),令(Δx1,Δy1)=(xw-xw1,yw-yw1),(Δx1,Δy1)為水平和垂直方向標定誤差。具體結果如圖7所示。
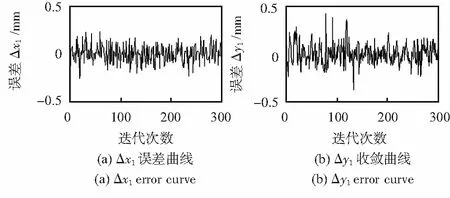
圖7 (Δx1,Δy1)的誤差曲線Fig 7 (Δx1,Δy1)error curve
3.2 實 驗
采用激光攝像式傳感器對鋼軌進行輪廓測量。圖8為鋼軌輪廓圖像。借助上述標定的測量模型,將提取的任意點鋼軌輪廓中的像素坐標(XE1,YE1),即可得到相應點的鋼軌輪廓數據(xw1,yw1)。
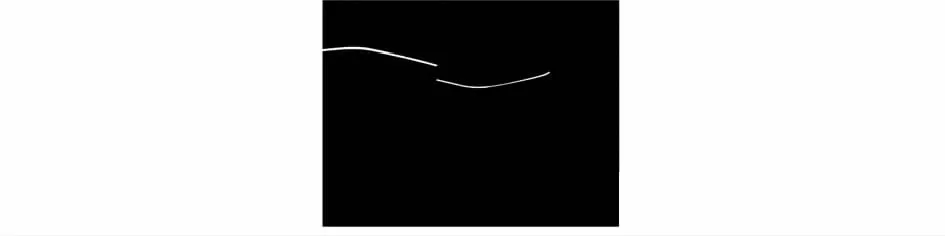
圖8 鋼軌輪廓圖像Fig 8 Rail profile image
4 結 論
本文建立了攝像機傳感器的測量模型,提出一種基于共面標定參照物的線結構光傳感器的棋盤格標定方法,其標定的精度能夠很好地控制在0.3 mm內,因此,可以將該標定方法應用到鋼軌輪廓檢測中,這樣能夠直觀地反映出整個鋼軌的信息,為軌道幾何參數的測量做下良好的鋪墊作用。
[1] 趙國堂.高速鐵路無碴軌道結構[M].北京:中國鐵道出版社,2006.
[2] 羅 林,張格明,吳旺青,等.輪軌系統軌道平順狀態的控制[M].北京:中國鐵道出版社,2006.
[3] 練松良,黃俊飛.客貨共運線路軌道不平順不利波長的分析研究[J].鐵道學報,2004,26(2):111-115.
[4] 高偉杰.基于機器視覺的鋼軌輪廓檢測系統的研究[D].北京:北京交通大學,2012.
[5] 張廣軍.機器視覺[M].北京:科學出版社,2005.
[6] Zhang Z.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[7] 周富強,張廣軍,江 潔.線結構光視覺傳感器的現場標定方法[J].機械工程學報,2004,40(6):169-173.
[8] 姜 平,周根榮.基于計算機視覺的織物疵點自動檢測[J].傳感器與微系統,2006,25(1):73-75.
[9] 周富強,張廣軍.表面視覺傳感器模型參數的簡易標定方法[J].機械工程學報,2005,41(3):175-179.
[10] 王惠文,吳載斌,孟 潔.偏最小二乘回歸的線性與非線性方法[M].北京:國防工業出版社,2006.
[11] Matlab 7.0從入門到精通[M].北京:人民郵電出版社,2010.
Study of measurement method for rail profile based on machine vision*
XU Jin-qing, CHEN Tang-long, ZHAN Dong, YU Long, FENG Chao
(Southwest Jiao Tong University,Chengdu 610031,China)
Rail profile detection is a key and difficult issue for rail geometry parameters detection.Laser camera sensor is calibrated by 2D planar drone to build calibration model of world coordinate system and image coordinate system.Experimental calibration is carried out by checkerboard,300 groups of datas are obtained,and non-linear least square method is used to calibrate model parameters.The results show that the measurement error of the horizontal and vertical of checkerboard can be controlled around 0.3 mm by non-linear least-square method,it can be well applied for rail profile measurement.
machine vision; rail; profile; calibration
2013—09—15
國家“863”計劃資助項目(2011AA11A1102)
TP 391.4
A
1000—9787(2014)04—0027—04
徐晉卿(1986-),男,江西撫州人,碩士研究生,主要研究方向為視覺測量、圖像處理。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
