改進IMM的兩飛行體無源定位跟蹤算法*
2014-07-10 09:41:20高憲軍霍長庚談欣榮
現代防御技術 2014年2期
高憲軍,霍長庚,談欣榮
(空軍航空大學 科研部,吉林 長春 130022)
0 引言
兩飛行體間的相對定位難點主要表現在2個方面:一是飛行器間的相對測量信息較少,依靠單一時刻的量測信息無法實現兩飛行期間的相對定位;二是兩飛行器間復雜的相對運動形式,使得精確的跟蹤方程難以建立,從而影響跟蹤算法的精度。針對上述困難,本文選擇了基于相位差變化率[1-2]的無源定位方法對兩飛行體進行相對定位。單純利用無源定位技術不足以獲取運動目標連續的位置信息,對于運動目標而言需要進行有效的跟蹤濾波。
在機動目標跟蹤領域,交互式多模型(interacting multiple model,IMM)算法[3-6]被認為是迄今為止最有效的算法之一。交互式多模型算法考慮了模型的特點,它假設目標有多種運動狀態,每一種運動狀態對應一種模型,目標在任意時刻的運動狀態都可以用給定模型中的一種來表示,而運動狀態的變化也就是運動模型之間的切換用齊次馬爾可夫鏈表示,目標的濾波結果是多個模型濾波結果的加權綜合。對于不同的應用要求,IMM算法又可能結合多種濾波算法。在這些算法中,各個模型匹配的都是卡爾曼濾波器(Kalman filter,KF)或者無跡卡爾曼濾波器(unscented Kalman filter,UKF)。這樣做有算法簡單,計算量小等優點,但是這些算法存在線性化誤差,估計精度不高,且不適用于非高斯問題。
對于大多數的無源定位系統而言,其所提供的測量數據與目標狀態間常呈非線性關系。如果希望利用觀測數據完成目標狀態的更新,必須解決非線性濾波問題。近幾年,粒子濾波(particle filtering,PF)被應用于目標跟蹤,成功地解決了濾波的非線性非高斯問題。將IMM算法與粒子濾波相結合的IMMPF(interacting multiple model particle filter)[7-10]算法采用交互式多模型結構來描述目標的運動過程,采用粒子濾波算法進行目標狀態估計,集成了IMM對機動目標跟蹤的良好特性,同時避免了線性化誤差和高斯噪聲的限制,有效地提高了狀態估計的精確度。然而,粒子濾波的主要問題是巨大的計算量,若多模型中每個模型匹配一個粒子濾波器,計算量無疑會很大,影響跟蹤的實時性。
針對以上問題,本文提出了一種改進的IMM濾波算法(IMMK-UKF-PF)進行定位跟蹤。其原理是:將系統的多模型分成3類,①線性模型,匹配無跡卡爾曼濾波;②三階及三階以下非線性高斯模型,匹配無跡卡爾曼濾波;③三階以上非線性高斯模型或非高斯模型,匹配粒子濾波。仿真結果表明該算法大大改善了計算效率。
1 利用相位差變化率的兩飛行體二維相對定位原理
為了便于實現二飛行器間的相對定位,本文首先建立兩飛行器A和B的相對坐標系如圖1所示。
圖1 兩飛行器相對定位中的相對坐標系Fig.1 Relative coordinate system between two aircrafts in the relative location

在二維平面上,觀測站載機在機身上設置雙陣元E1,E2,由于信號到達干涉儀天線的時間有先后,導致干涉儀接收到的信號存在相位差φt,則在某時刻t,
(1)
式中:d為基線間間距;λ為信號波長;w0為輻射波角頻率;Δt為輻射波到達兩陣元的時間差;βt為輻射源的方位角。
經過一系列的推導可得
(2)

由三角函數定義可推出
(3)
(4)
(5)
(6)
式中:x,y為t時刻的相對位置。
當目標輻射源運動時,由于無法得到目標的運動速度,此時不能對目標進行即時定位,因而必須在此基礎上通過相應的濾波算法對目標速度進行估計和逼近,從而得到目標的速度和位置。
2 IMMK-UKF-PF濾波算法
設一個使用確定模型集合M=Mii=1,2,…,M的混合系統,狀態方程和觀測方程離散形式為
xik=Fixik-1+Givik-1,
(7)
zik=Hxik+rk,
(8)
式中:xik為在模型i(i=1,2,…,M) 下的目標運動狀態矢量;vi為相應的非高斯過程噪聲;zik為觀測矢量;r為高斯觀測噪聲。
Qik和R分別為vik和rk的協方差。一共有M個模型,假設其中1到M1是線性的,M1到M2時是三階及三階以下非線性高斯模型,其他是三階以上非線性高斯模型或非高斯模型。
系統模型之間的轉移概率用一個馬爾可夫鏈來表示:
Pmk+1=jmk=i=Pij,i,j=1,2,…,M.
(9)

圖2給出了IMMK-UKF-PF濾波算法結構示意圖。
從k-1時刻開始到k時刻,一個采樣周期的IMMK-UKF-PF實現步驟如下:
(1)步驟1:輸入交互
j=1,2,…,M,
(10)
圖2 IMMK-UKF-PF濾波算法結構示意圖Fig.2 Filter algorithm structure of IMMK-UKF-PF
j=1,2,…,M.
(11)
三階以上非線性高斯模型或非高斯模型中的粒子與其他模型估計值進行交互運算:
l=1,2,…,N;j=M2+1,M2+2,…,M,
(12)

(2) 步驟2:濾波
(3) 步驟3:模型概率更新
每一時刻模型概率都需要得到更新,模型1到M2有似然函數:
Λik=Nδik;0,Sik,i=1,2,…,M2.
(13)
其中殘差的協方差計算如下:
(14)
而模型M2到M有似然函數:
i=M2+1,M2+2,…,M.
(15)
其中殘差的協方差計算如下:
i=M2+1,M2+2,…,M.
(16)
各模型概率更新如下:
(17)
(4) 步驟4:輸出交互
(18)
3 仿真驗證
為了驗證本文改進的IMM算法的有效性,將其與IMM-PF算法進行Matlab仿真,并將仿真結果進行比較分析。
仿真的軟硬件環境為:聯想IdeaPad Y450筆記本電腦,英特爾 酷睿2 雙核 P7450 @ 2.13 GHz筆記本處理器器,2 G內存,Windows 7家庭普通板32位系統,Matlab 7.1軟件仿真平臺。
仿真中采用CV模型、CA模型和JERK模型[12]進行交互。


建立如下狀態方程:

可以得到觀測方程
式中:n1i,n2i,n3i,n4i為相互獨立服從零均值高斯分布的測量誤差。
當目標處于變加速運動時,x或y一維情況下狀態轉移矩陣為
p1=2-2αT+α2T2-2e-αT/2α3,
q1=e-αT-1+αT/α2,
r1=1-e-αT/α,
s1=e-αT,
式中:α為“機動”頻率。
各模型濾波狀態初始化,按照假定目標距離搜索范圍為0~500 km,目標速度范圍假定為-500~500 m/s,且初始分布假定為均勻分布,在此假定下由概率論知識得到目標位置和速度的期望值以及相應協方差值。X(0)=(4 000,3 000,250,450)T是初始狀態矢量,P=diag(1,1,1,1)是初始狀態協方差,各模型初始概率均為1/3,模型轉移概率矩陣為
粒子濾波時模型的粒子數為N=800,采樣周期為T=1 s,蒙特卡羅仿真次數為100。
仿真結果如圖3~5所示,分別表示IMMPF,IMMK-UKF-PF2種算法估計目標位置的誤差曲線。
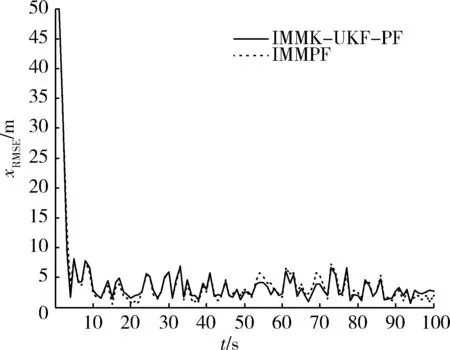
圖3 x方向均方根誤差Fig.3 Error of x direction
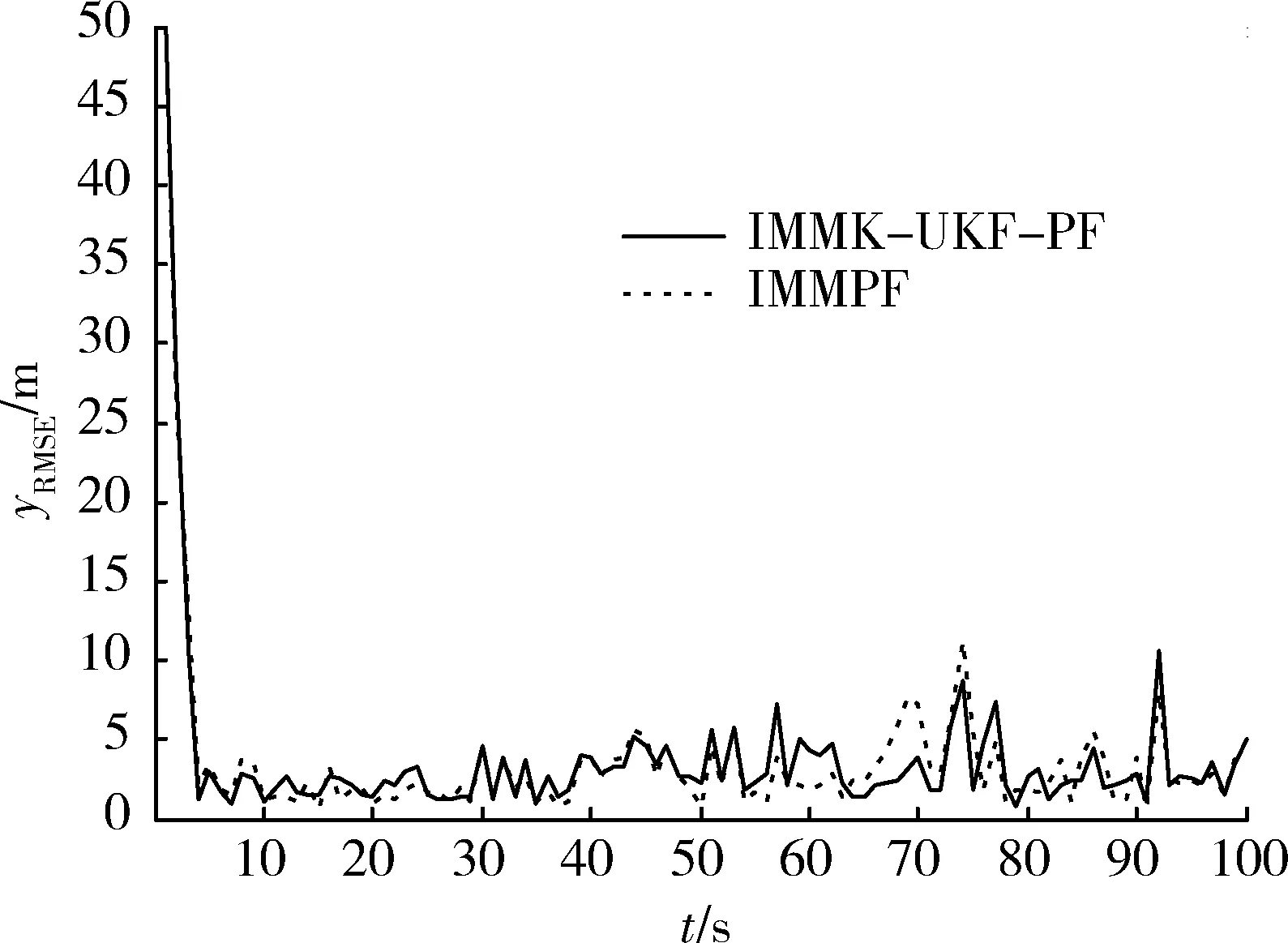
圖4 y方向均方根誤差Fig.4 Error of y direction
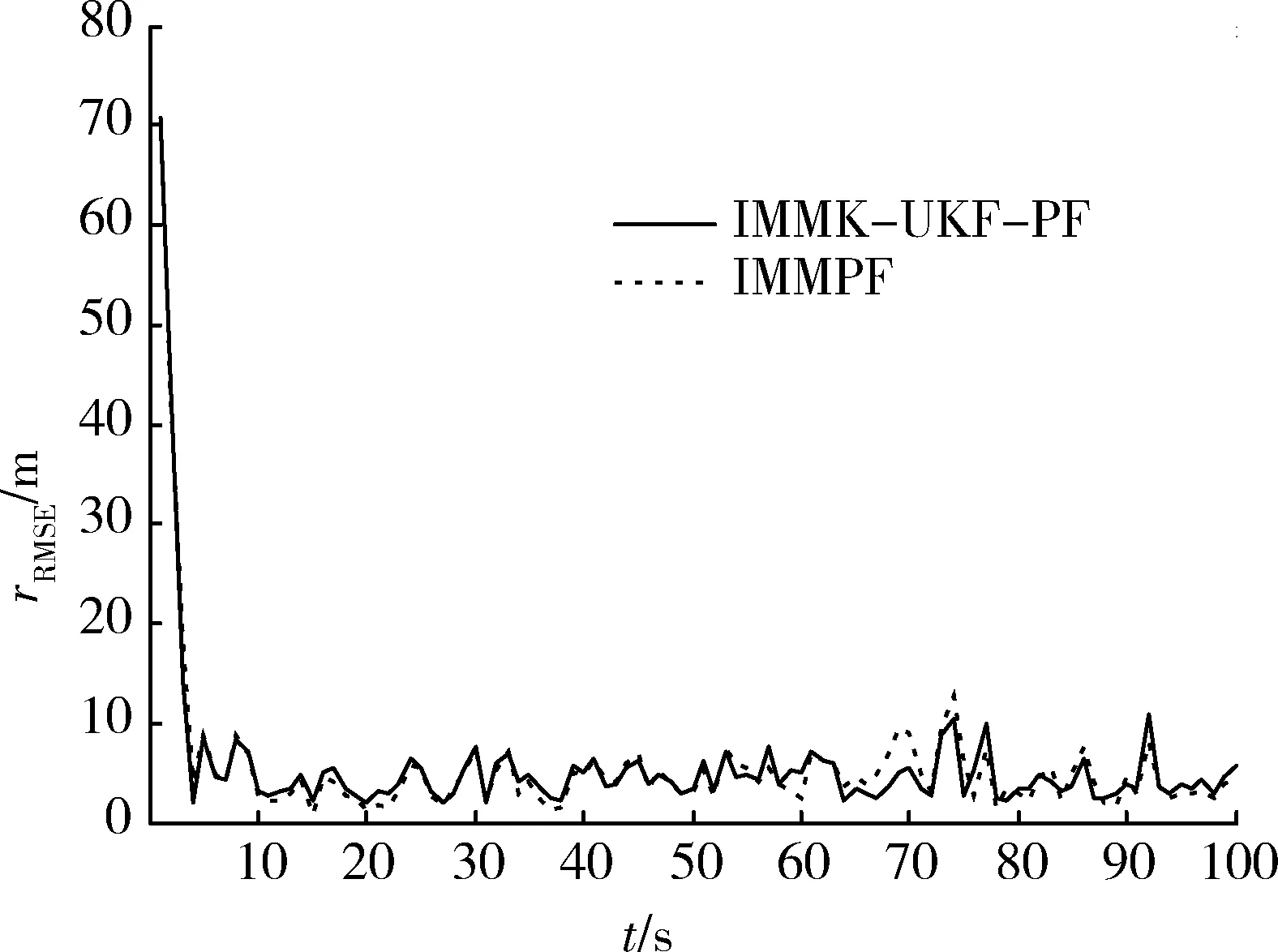
圖5 r方向均方根誤差Fig.5 Error of r direction
Execution time (seconds)
tIMMPF= 13.451 2,tIMMK-UKF-PF= 6.032 4.
由圖3~5以及仿真時間可以得出,IMMK-UKF-PF濾波算法的均方根誤差略小于IMMPF算法,跟蹤性能有一定的改善,最重要的是仿真所用時間減少很多,這在現實應用中具有重要的意義。
4 結束語
本文在基于相位差變化率的兩飛行體相對定位問題的基礎上提出了一種改進的交互式多模型濾波算法(IMMK-UKF-PF),利用不同的模型匹配不同類型的濾波器,IMMK-UKF-PF算法充分發揮了粒子濾波和無跡卡爾曼濾波以及卡爾曼濾波各自的優點,大大提高了計算效率,減少了跟蹤定位所用時間,同時該算法具有良好的跟蹤性能和較強的魯棒性。在實際的機動目標跟蹤中,目標的運動情況比較復雜,往往需要多個不同參數的線性及非線性模型進行匹配,在這種情況下,采用IMM-UKF-PF算法改善的計算負荷是可觀的。
參考文獻:
[1] 孫仲康,郭福成,馮道旺.單站無源定位跟蹤技術[M].北京:國防工業出版社,2008.
SUN Zhong-kang,GUO Fu-cheng,FENG Dao-wang.Passive Lacation and Tracking Technology by Single Observer [M].Beijing:National Defense Industry Press ,2008.
[2] 胡來招.無源定位[M].北京:國防工業出版社,2004.
HU Lai-zhao.Passive Lacation [M].Beijing:National Defense Industry Press,2004.
[3] 梁彥,潘泉,楊峰,等.復雜系統的現代估計理論及應用[M].北京:科學出版社,2009.
LIANG Yan,PAN Quan,YANG Feng,et al.Modern Estimate Theory and Application in Complex System[M].Beijing:Seience Press 2009.
[4] MAZOR E,AVERBUCH A, BAR-SHALOM Y,et al. Interacting Multiple Model Methods in Target Tracking:A Survey[J]. IEEE Trans.on Aerospace and Electronic Systems,1998,34(1):103-122.
[5] BLOM H A P,BAR-SHALOM Y. The Interacting Multiple Model Algorithm for Systems with Markovian Switching Coefficients[J]. IEEE Trans on Automatic Control.1988,33(8):780-783.
[6] LI X R.Multiple-Model Estimation with Variable Structure-PartⅡ:Model-Set Adaptation[J]. IEEE Trans on Automatic Control,2000,45(11):2047-2060.
[7] BOERS Y,DRIESSEN J N. Interacting Multiple Model Particle Filter[J]. IEE Proc.-Radar Sonar Navig,2003,150(5):344-349.
[8] BLOM H A P,BLOEM E A. Particle Filtering for Stochastic Hybrid Systems[C]∥43IEEE Conference on Decision and Control.USA:IEEE,2004,3:3221-3226.
[9] MORELANDE M R,CHALLA S. Maneuvering Target Tracking in Clutter Using Particle Filters[J].IEEE Trans.on Aerospace and Electronic Systems,2005,41(1):252-270.
[10] MUKESH A Z, MERCHANT S N, UDAY B D. Arbitrary Trajectories Tracking Using Multiple Model Based Particle Filtering in Infrared Image Sequence[C]∥Proceeding of the International Conference on Information Technology:Code and Computer(ITCC04).Washington,USA:IEEE,2004.
[11] 宮淑麗,王幫峰,吳紅蘭,等.基于IMM算法的機場場面運動目標跟蹤[J].系統工程與電子技術,2011,33(10):2322-2326.
GONG Shu-li,WANG Bang-feng,WU Xiao-lan,et al.Tracking of Moving Tragets on Airport Surface Based on IMM Algorithm[J].System Engineering and Electronics,2011,33(10):2322-2326.
[12] 李大治,程,皇甫堪.基于JERK模型的單站無源定位跟蹤算法研究[J].系統仿真學報,2008,20(24):6750-6752.
LI Da-zhi,HUNAG Pu-kan.Research on Single Observer Passive Location and Tracking Algorithm Based on JERK Model[J].Journal of system simulation,2008,20(24):6750-6752.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36