應用新法規的某款卡車車外通過噪聲測試方法
2014-07-08 02:16:58趙偉博
機械工程師 2014年10期
趙偉博
(江淮汽車股份有限公司,合肥 230022)
0 引 言
隨著科技進步和現代生活標準的逐步提高,汽車的年產量和保有量不斷增加。在汽車道路行駛過程中,車外通過噪聲對環境的污染尤為突出,已經逐步成為城市的主要噪聲污染源之一。與此同時國家也加強了對噪聲的法規要求,現行的車外噪聲法規《GB 1495-2002 汽車加速行駛車外噪聲限值及測量方法》正在重新修訂。即將實行的新法規,其對各種車輛行駛過程中的車外噪聲有明確的定義和要求;無論測試方法還是噪聲限值都有較大的變動,這樣的變動勢必會造成整車開發成本和效益的變化。
新修訂的法規嚴格規定了各種車輛的車外噪聲限值,實施日期,噪聲測量方法和測量場地要求等。經過對新法規的學習和理解,現針對某款微型卡車進行新車外噪聲方法測試,相關參數計算以及數據處理,明確哪些系統的結構設計、指標參數等對新法規要求的車外噪聲有重大的影響。
1 新方法解讀
1.1 車外噪聲限值目標
對特殊車型的限值寬松條件說明:
1)GVM≤2 500 kg 的M1 類車型,噪聲測量過程中采用多軸驅動或采用中置(后置)發動機后軸驅動時,其限值增加1dB(A)。
2)GVM≤2 500 kg 的M1 類車型,PMR>160 kW/t 的M1 類車型,其限值增加1dB(A)。
3)N1 類車型,GVM>2 500 kg 的M1 類車型,噪聲測量過程中采用多軸驅動或采用后軸驅動時,其限值增加1dB(A)。
4)多于兩軸的M2、M3、N2、N3 類車型,其限值應增加1dB(A)。
5)噪聲測量過程中采用多軸驅動的M2、M3、N2、N3類車型,其限值應增加1dB(A)。
該微型卡車最大總質量2 700 kg,為N1 類卡車;采用后軸驅動,滿足3)項的限值寬松條件,限值增加1dB(A)。故2016 年3 月15 日后,新法規對該微型卡車的車外噪聲要求為不大于75dB(A),較原先法規的78 dB(A)限值降低了3 dB(A),要求更為苛刻。
1.2 測量條件
測試環境必須滿足以下條件:a)以測量場地中心為基點、半徑50 m 的范圍內,不存在大的聲反射物;b)試驗路面和周圍場地表面干燥,沒有積雪、松土以及爐渣之類的吸聲材料;c)傳聲器附近沒有任何影響聲場的障礙物;d)噪聲測量期間,環境溫度必須在5~40 ℃的范圍,傳聲器高度處的風速不超過5 m/s;e)背景噪聲(包括風噪)比被測汽車噪聲至少低10 dB(A),否則需對測試結果進行修正。
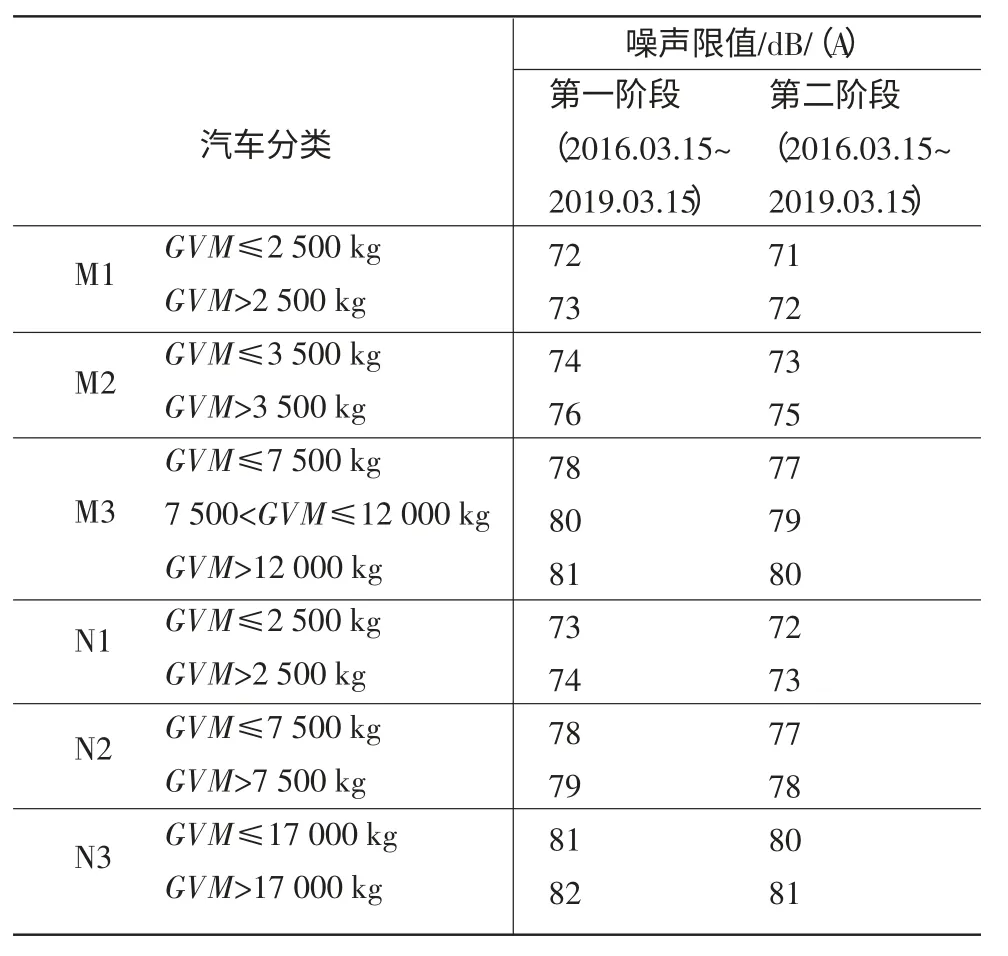
表1 汽車行駛車外噪聲限值
新法規噪聲的測量條件較原先法規要求基本一致。
1.3 測量方法
如圖1:AA′線為加速始端線,BB′線為加速終端線,加速段長度為2×(10m±0.05m),傳聲器離地面高1.2m±0.02m,距行駛中心線CC′7.5 m±0.05 m 處。從汽車接近AA′線到汽車后端通過BB′線的整個測量過程中,汽車行駛中心線應盡可能接近CC′線;當汽車參考點到達PP′線時,測量車速vtest必須在(50±1)km/h 范圍內。為了保持汽車通過測量場地時的穩定性,建議至少預留60 m 的平穩加速連接段。

圖1 測量場地及傳聲器布置示意圖
擋位的選擇:測量擋位依據油門或節氣門全開條件下所能達到的最大加速度值awot和參考加速度值awotref的關系來選擇。
1)如果某一擋位加速度測量值awot不超過(awotref+0.5)m/s2,且與參考加速度awotref的差異在awotref的±10%范圍內,則采用此擋位測試。如果多于一個擋位達到要求的加速度,則選擇awot最接近awotref的擋位進行測量。
2)如果沒有擋位能達到要求的加速度,則選擇一個加速度大于awotref的擋位i 和加速度小于awotref的擋位(i+1)進行測試。如果擋位i 的加速度值awot不超過(awotref+0.5)m/s2,則需要分別采用這兩個擋位進行測量。傳動比加權系數(與參考加速度有關)通過下式計算:K=(awotrref-awot(i+1))/(awot(i)-awot(i+1))。
3)如果擋位i 的加速度大于(awotref+0.5)m/s2,則采用加速度小于且最接近(awotref+0.5)m/s2的擋位進行測量,使用測量過程中獲取的加速度值awottest代替awotref來計算部分功率系數,(i+1)擋位的加速度小于aurban時除外。如果擋位i 的加速度大于(awotref+0.5)m/s2,同時(i+1)擋位的加速度值小于aurban,則采用i 和(i+1)這兩個擋位來進行測量,包括加速度大于(awotref+0.5)m/s2的擋位。
awottest的計算適用于M1、N1、M2 類汽車。根據汽車參考點定義,參考點在汽車最前端,則參與公式計算的汽車長度l=lvel;如參考點在汽車前、后中心,則l=1/2lvel;如參考點在汽車最后端,則l=0;式中lvel為整車車長。汽車參考點通過AA′線、PP′線時的車速定義為vAA′、vPP′,汽車最后端通過BB′線時的車速定義為vBB′。整個行駛過程中的加速度通過下式計算:awottest=[(vBB′/3.6)2-(vAA′/3.6)2][2×(20+l)]。
2 相關參數理解
要進行車外加速噪聲新方法相關參數的計算,必須了解新法規中的一些基本定義和概念,比如汽車整備質量mkerb、汽車最大總質量GVM、發動機額定功率Pn、功率質量比系數PMR、目標加速度aurban、參考加速度awotref、傳動比加權系數k 和部分功率系數kp。
目標加速度aurban:城市工況下,調查得到的汽車典型加速度值,是汽車功率質量比系數PMR 值的函數。目標加速度aurban定義如下:aurban=0.631g10PMR-0.09。
參考加速度awotref,在試驗路面上加速測量時期望獲取的汽車加速度值,是汽車功率質量比系數PMR 值的函數,PMR 值不同的汽車,對應函數形式也不同。參考加速度awotref定義如下:PMR≥25 時,awotref=1.591gPMR-1.41;PMR<25 時,awotref=aurban=0.631gPMR-0.09。
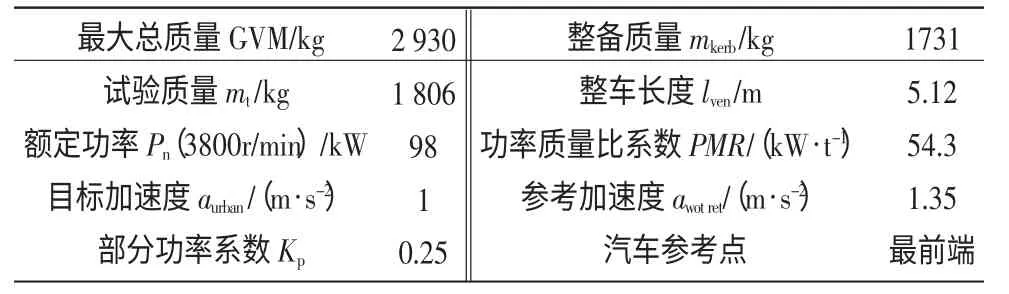
表2 該微型卡車相關參數計算表
表2 中:PMR=(Pn/mt)×1 000;mt=mkerb+75;aurban=0.631gPMR-0.09;awotref=1.591gPMR-1.41;KP=1-aurban/awottest。
3 新方法應用測試及數據處理
參照標準GB 1495-20xx 對測試場地和環境的要求,選擇某一段平直柏油路面作為測試場地。此段路面平整、堅實,測試場地附近無大型障礙物,具體如圖2 所示。每次測試時,環境背景噪聲均小于50 dB(A),風速小于5m/s,氣溫處于20 ~30 ℃攝氏度之間,滿足測試要求。

圖2 測試車輛-xx 微型卡車

圖3 聲級計和GPS 測速設備
實際測試過程中,難點在于車輛經過加速區間中線時保證50 km/h 的時速,由于整個過程為全油門加速工況,所以預加速和車輛基準點的判定顯得尤為重要;然后采用相機記錄下來這一過程,相機必須能夠同時拍攝到基準點過中線時的位置和GPS 測速儀上顯示的車輛瞬時速度。
3.1 擋位的選擇
針對該微型卡車分別進行各擋位全油門工況的加速度測試,利用下式計算:

平均值與每次測量值差異控制在±10%范圍內。
最終IV 擋全油門的加速度1.33 m/s2,在參考加速度(awotref±10%)范圍內且最接近awotref,滿足擋位選擇的要求。
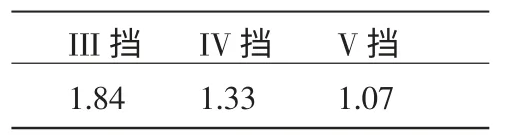
表3 各擋位實際加速度m/s2
3.2 IV 擋全油門及勻速車外噪聲測試
按照新測試方法且保證滿足車外噪聲測試條件要求,進行IV 擋全油門工況和勻速工況的通過噪聲測試,測試結果見表4、表5。
3.3 測試數據處理
測量加速度滿足兩個擋位測量要求時,加速噪聲和勻速噪聲的噪聲測量結果需要對兩個擋位的測試值采用公式計算如下:

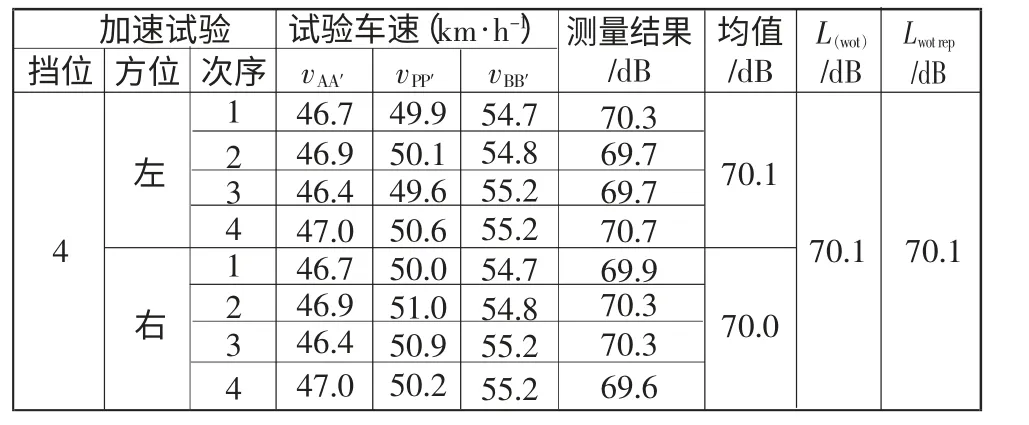
表4 IV 擋全油門車外噪聲測試結果
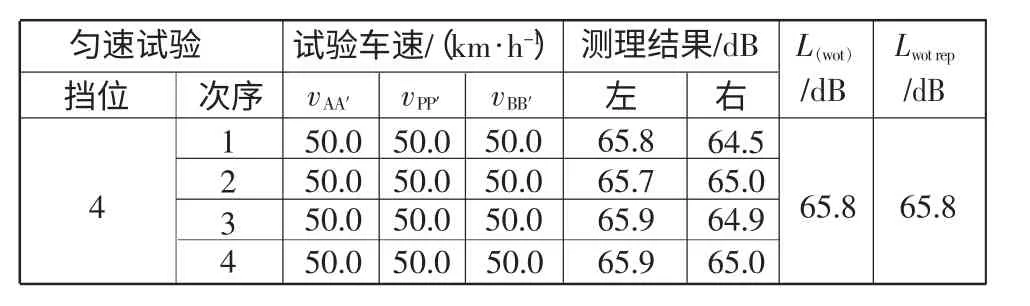
表5 IV 擋勻速車外噪聲測試結果

式中:k=(awotref-awot(i+1))/(awot(i)-awot(i+1))。該卡車經過加速度測量計算,只有IV 擋滿足新法規測試方法要求,當只有一個擋位進行測量時,則此擋位測量結果就是計算值。
通過加權合并Lwotrep和Lcrsrep計算,并保留到小數點后一位,作為測量最終結果,公式如下:Lurban=Lwotrep-kp(Lwotrep-Lcrsrep)。
權重系數kp為城市工況下的部分功率系數。當僅采用一個擋位進行測量時,kp通過公式kp=1-(aurban/awottest)獲取,前文參數計算中已經得出kp=0.25,代入Lurban計算公式最終求得該微型卡車加速行駛車外噪聲為69.0dB(A),滿足GB1495-20xx 限值不高于75dB(A)要求。
4 結 論
1)車外加速噪聲測試新方法對全油門加速噪聲和勻速噪聲分別進行了加權處理,而且中線50 km/h 的要求都較原來的法規更加寬松,這樣可能更加符合車輛實際行駛習慣及道路條件等。
2)擋位的選擇以及行駛加速度的導入,說明了法規更加注重車輛動力性與車外噪聲的平衡,杜絕了制造廠犧牲動力性降低車外噪聲的行為。
[1] 林郁山,蔡銘,李鋒.考慮加速度的交通噪聲源強研究[J].應用聲學,2012(4):282-286.
[2] 張式杰.汽車噪聲分析與降噪措施及噪聲測量方法[J].汽車實用技術,2011(2):55-60.
[3] 王 霞.汽車加速行駛車外噪聲的測量及分析[J].重慶工學院學報,2005(11):13-16.
[4] 陶榮華,高尚流,王萬祥.汽車加速行駛車外噪聲治理[J].客車技術與研究,2006(4):9-11.
[5] 傅毅生.汽車車外噪聲控制[J].汽車技術,2006(5):8-11.
[6] 趙偉豐,趙蹇.進氣系統設計參數對進氣噪聲及車內車外噪聲影響研究[J].內燃機,2011(2):50-52.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
汽車與安全(2019年9期)2019-11-22 09:48:03
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
決策探索(2014年21期)2014-11-25 12:29:50