ATV車操縱穩定性測試系統開發及應用
2014-07-08 02:16:48葉芳徐中明譚海偉翟喜成
機械工程師 2014年10期
葉芳,徐中明,譚海偉,翟喜成
(1.重慶工商職業學院,重慶 400052;2.重慶大學 機械工程學院,重慶 400030;3.德國艾默克測試測量有限公司 上海代表處,上海 200052;4.重慶合川職教中心,重慶 401520)
0 引 言
ATV(All-terrain-vehicles)車,又稱全地域車,是具有跨騎式座椅、把式轉向、三輪或四輪結構,采用大尺寸、低氣壓輪胎的單人多用途車輛[1],在國內通常被稱為沙灘車。ATV 車主要應用領域涵蓋了農業、畜牧業、林業、狩獵、景觀美化、牧場經營、探險、工業、建筑及軍事等,被國內外市場廣泛認同。然而目前對ATV 的操縱穩定性的考察還有缺陷,操縱穩定性的研究常采用試驗和仿真來進行,仿真分析的方法準確性較弱,個體差異較大,不能正確和定量地評價ATV 的操縱穩定性,所以有必要開發出適合ATV 試驗工況的測試分析評價系統。
1 ATV 車操縱穩定性評價方法
車輛的操縱穩定性,指的是車輛在高速行駛下,接受駕駛員的控制能力及行駛方向的穩定性[2-5]。為評價ATV操縱穩定性,主要進行4 個試驗:穩態回轉試驗、轉向盤轉角脈沖輸入試驗、轉向盤階躍試驗、蛇形試驗。試驗方法、數據處理方法等參照GB 6323《汽車操縱穩定性試驗方法》進行。
穩態轉向特性描述了汽車在轉向輸入下能否穩定的動力學表現,當車速大于某臨界車速時,過多轉向的汽車受到輕微轉向干擾也會發生運動不穩定現象[6-7]。因此不允許汽車轉向特性有過多轉向,然而很多汽車在側向加速度ay到達一定值后,會出現過多轉向現象,這個側向加速度an稱中性轉向點。對一般乘用車,an不應小于5 m/s2,一般的說ay=4 m/s2時,(α1-α2)=2°左右最好,不應大于4°。
轉向盤轉角階躍輸入試驗是指給轉向盤一個突然的固定不變的轉角δsw輸入,相當于給系統一個階躍位移干擾。如果系統穩定,在此干擾下,將從一個穩態(直線行駛)過渡到另一個穩態(轉圈行駛),主要用橫擺角速度γ(t)來表達多個評價指標[8]。
橫擺角速度相對阻尼系數ξ 隨車速V 的增大而減小。為激起橫擺角速度的振動現象,轉向盤轉角階躍輸入試驗的試驗車速都比較高。在ISO 7410-88《側向瞬態響應試驗方法》中,要求試驗車速為80 km/h;在GB/T 6323.2-94《轉向盤轉角階躍輸入方法》中,規定試驗車速為被測汽車最高車速的70%。具體試驗方法是,被測車輛在加速路段以試驗車速V 等速轉向行駛,進入試驗區段后,繼續以穩定車速V 按場地要求路線行駛。同時記錄,當車輛行至指定地點,駕駛員應以最快的速度轉動轉向盤(或手把)至預先確定的轉角,并保持轉向盤(或手把)轉角不變,同時保持節氣門和油門開度不變。從駕駛員轉動轉向盤開始,至本次試驗結束,記錄時間應為6s 左右,預先確定好的轉向盤轉角位置,由試驗要求達到的穩態側向加速度值決定。
汽車轉向盤轉角階躍輸入試驗結果,比較理想的數據處理方法是對橫擺角速度響應時間歷程γ(t)進行非線性曲線擬合,計算出上述指標數值。
轉向盤轉角脈沖輸入試驗是為得到作為線性動力學系統的車輛的頻率響應特性,以此體察車輛轉向輸入響應的真實以及失真程度[9]。
進行試驗時,首先標定直線行駛位置,然后給轉向盤一個三角脈沖轉角輸入,即向左轉動轉向盤,并迅速轉回原處保持不動。記錄橫擺響應全過渡過程,直至車輛回復到直線行駛狀態。轉向盤轉角輸入脈寬為0.3~0.5 s,其最大轉角應使本次試驗過渡過程中最大側向加速度為4 m/s2左右,當車速為80 km/h 時,轎車轉向盤轉角約為70°~90°,試驗期間,車速保持不變。
試驗應在往返兩個行駛方向進行,每個行駛方向至少按左、右方向轉動轉向盤(轉角脈沖輸入)各3 次。對于車速低的,可以將試驗車速定低點。
要得到汽車的橫擺角響應的頻率特性圖,可將采集的數據在專用的信號處理設備上用快速傅立葉變換得到,也可通過專用軟件實現。
蛇形試驗屬于閉路系統試驗,反映汽車進行急劇轉向的能力,同時反映車輛舒適性和安全性[10]。試驗時駕駛員駕駛被試車輛以基準車速通過有效標樁區,小型汽車的基準車速為65 km/h;最大質量大于6 t 的汽車,基準車速為60 km/h;若大于15 t,基準車速為50 km/h。汽車進入入口前,打開儀器進行記錄,一直記錄到汽車駛出出口,如圖1 所示。
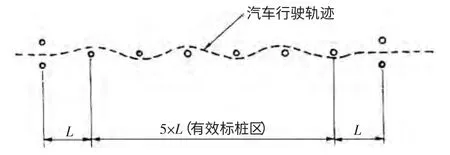
圖1 蛇形穿桿試驗示意圖
2 測試系統硬件設計
2.1 測試系統結構
根據上述評價方法,操縱穩定性測試系統由陀螺儀、車速傳感器,信號調理電路、數據采集器、外觸發電路、交換機、普通網線、計算機構成。系統結構原理圖如圖2 所示。系統工作原理:通過GPS 車速傳感器和角速度陀螺儀測量車輛質心位置處的車速信號和橫擺角速度信號,經過信號調理電路得到適當的電壓信號,由采集系統將幾路信號采集并存儲于PC 硬盤或CF 卡中[13]。
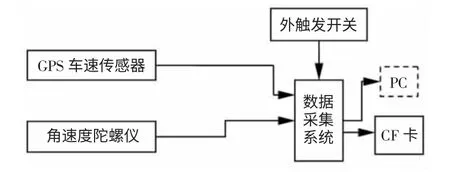
圖2 操縱穩定性道路試驗測試系統框架圖
測試系統中的數據采集箱必須便攜、穩固、抗干擾,擁有6 個以上通道同步采樣,通道可擴展。選擇IMC 設備公司開發的便攜式數據采集器(IMC PL2/UICP8),該系統具有8 模擬通道進行同步采集,提供了16 位數字通道以備外觸發。使用以太網接口技術,數據采集機箱和計算機完全分離,操作方便,并且可利用Hub 進行多臺采集器并聯,擴展通道。
利用IMC 采集模塊提供的16 位數字輸入模塊以及內部的5V 恒流源,配備普通開關,設計了外觸發模塊。選用DIN_Bit01 作為觸發源,在DSUB-PLUG 數字盒內的BIT_01 端和LCOM 端接一個節點開關。開始觸發測量為高電平,結束觸發測量為低電平。圖3 所示為其電路圖。角速度陀螺儀選型為IMU201 六自由度慣性傳感器[11]。車速傳感器選用自主開發的VDL-1 型GPS 車速傳感器。

圖3 數字接口盒的電路圖
2.2 傳感器開發與應用
車速的精確測量直接影響車輛操縱穩定性試驗的準確性,傳統的車速測量儀使用不便,測量誤差相對較大,針對本測試系統,利用GPS 測速技術研制了一款高精度、低成本的車速傳感器(VDL-1 型GPS 車速傳感器),將其應用在汽車操穩性試驗中,降低了汽車操穩性試驗條件的困難程度[12]。
該傳感器將廣泛應用于定位的GPS 技術應用在瞬時車速測量上,利用單片機PIC16F877 作為控制器的核心,E580 OEM 模塊接收GPS 信號,形成了由6 個模塊組成的GPS 車速傳感器系統,分別為:1)電源轉換系統,實現+12 V 和+5 V 供電2 種方式供電,實現+12 V 向+5 V,+5 V 向+3 V,+12 V 向+3 V 的多種電壓轉換;2)GPS 接收模塊,采用國產GPS 導航模塊E580 接收GPS 衛星信號;3)電平轉換模塊,設計電平轉換電路實現單片機、GPS 模塊與計算機異步串行通訊接口之間的通訊;4)單片機控制模塊,選用Microchip 公司的PIC 8 位單片機16F877 A作為主控元件,實現信號通訊、轉換、控制、顯示等功能;5)D/A 轉換模塊,選用美國MAXIM 公司的8 位串行D/A芯片MAX518,實現數字信號向模擬信號的轉變,實現數字信號和模擬信號雙輸出,以便采集器采集;6)顯示模塊,選用動態掃描顯示方式,將速度信號對應的ASCII 碼轉換成二進制碼,通過單片機串行口RB0~RB7 直接輸出到八段LED 數碼管a~dp 上,實現車速的實時顯示[13]。
該傳感器可測車速范圍為0~200 km/h,靈敏度為51(km/h)/V。成本低廉,測量精度較高,抗干擾性能好,易于擴展升級。應用在ATV 操穩性試驗中,提高了測試精度,降低了試驗條件。
3 數據分析軟件開發
由于采集器采集到的原始數據為famos 格式,為了避免讀取數據的繁瑣,提高有效性,選擇了IMC 提供的Famos 平臺進行軟件開發。
根據結構化編程的思想將軟件系統設計成幾個模塊,根據系統的整體需求,操縱穩定性道路試驗分析系統分為:數據錄入、試驗分析模塊、退出模塊[14]如圖4 所示。
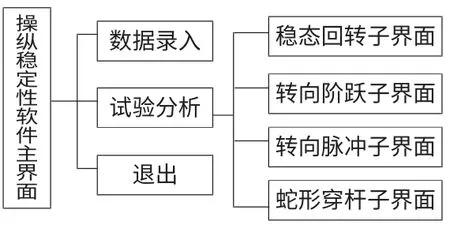
圖4 操縱穩定性分析系統總體結構圖
其中穩態轉向子程序又可以分為:前處理模塊,參數輸入模塊,結果計算模塊,數據保存模塊。
轉向階躍分析子程序可以分為:前處理模塊,零位校正模塊,圖形顯示模塊,波形截取模塊,結果計算模塊,生成報告模塊。
轉向脈沖子程序可以分為:前處理模塊,零位校正模塊,圖形顯示模塊,波形截取模塊,頻譜計算模塊,生成報告模塊。
蛇形穿桿子程序可以分為:前處理模塊,零位校正模塊,參數輸入模塊,結果計算模塊,生成報告模塊。
軟件的結構設計后,即進行各底層子模塊的詳細設計,以程序流程圖(圖5)的形式表現出來。

圖5 數據分析處理程序流程圖
4 測試系統應用
4.1 操縱穩定性道路試驗
參照GB/T 6323—1986《汽車操縱穩定性試驗方法》,結合ATV 的實際特點進行操縱穩定性試驗。試驗選用以上所述測試系統,該測試系統試驗前在加速度振動臺上進行標定[15]。
試驗時天氣晴好,車輛技術狀況符合試驗要求,駕駛員體重在70 kg 左右,乘騎人員為專職試車員,經驗豐富。試驗路面等級等同于B級路面。具體試驗方法按前述評價方法進行。標定好傳感器,將車速傳感器,角速度陀螺儀綁在車架尾部,并確保在車身縱向中心線位置。為了方便脫機采樣,設置好外觸發,并將開關由駕駛員控制采樣開始,采集試驗階段的橫擺角速度信號和車速信號。采樣時間250s,如圖6 所示。

圖6 操縱穩定性試驗儀器設備現場圖
4.2 試驗結果及分析
1)穩態回轉試驗。進行某方向試驗重復3 次,結果如表1 所示。
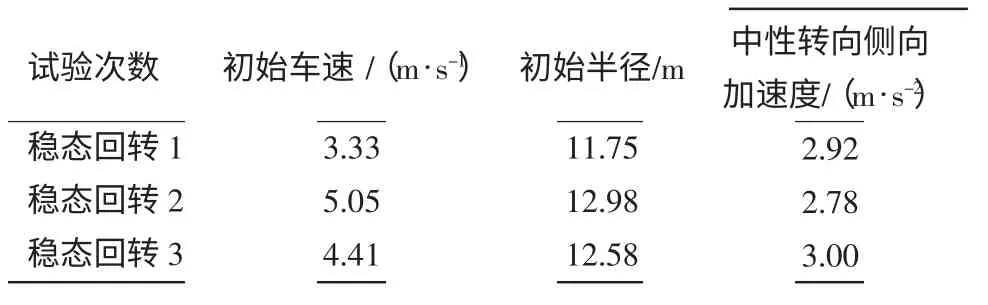
表1 某國產車穩態回轉試驗
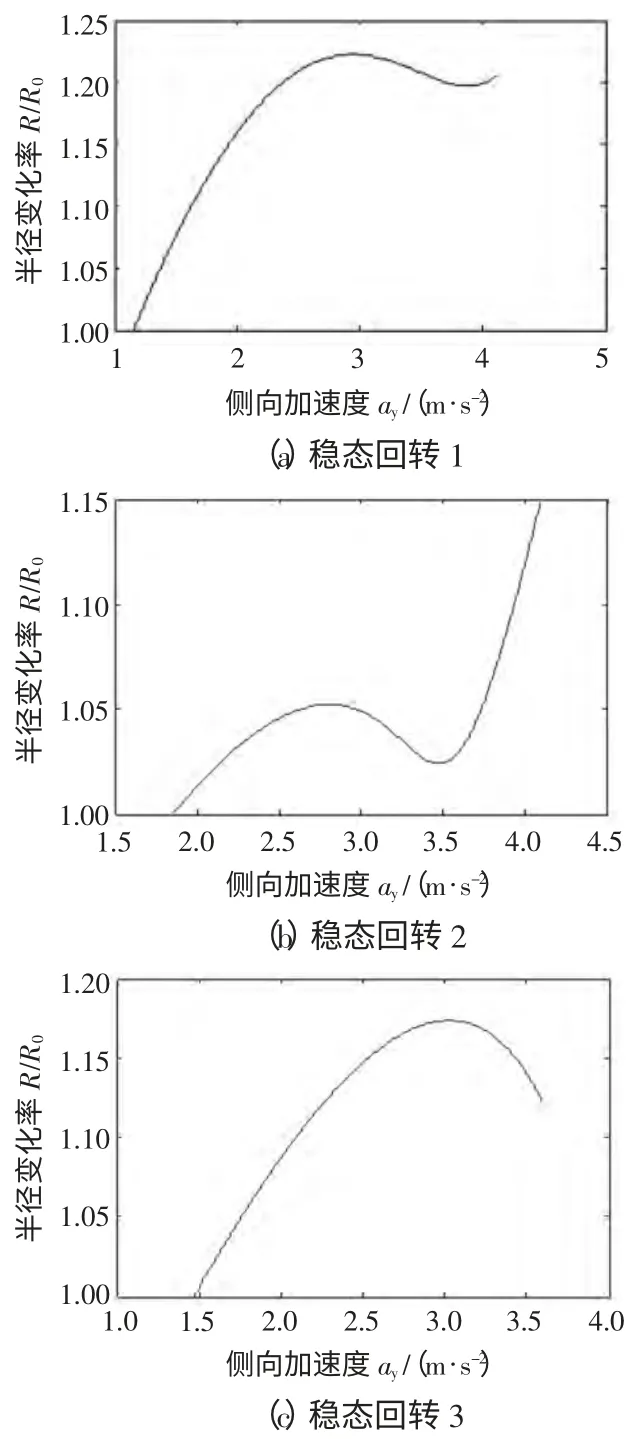
圖7 汽車穩態轉向特性圖
汽車穩態轉向特性圖分別如圖7 所示。
從圖7 可以發現,該ATV 車先呈現不足轉向,再呈現一定程度的過多轉向。中性轉向點出現在3 m/s2左右,且該車能達到的最大穩定測向加速度不超過4 m/s2,這個值相對于轎車來講很低,這反映了四輪ATV 車穩態轉向特性差[13]。
2)轉向盤轉角階躍試驗(表2)。
試驗結果差距較大,需分析試驗是否可靠。
3)脈沖試驗。
從兩款車的脈沖響應分析得到的諧振頻率可以看出,進口車的諧振頻率比國產車要好,這同駕駛員的主觀操作感受符合。
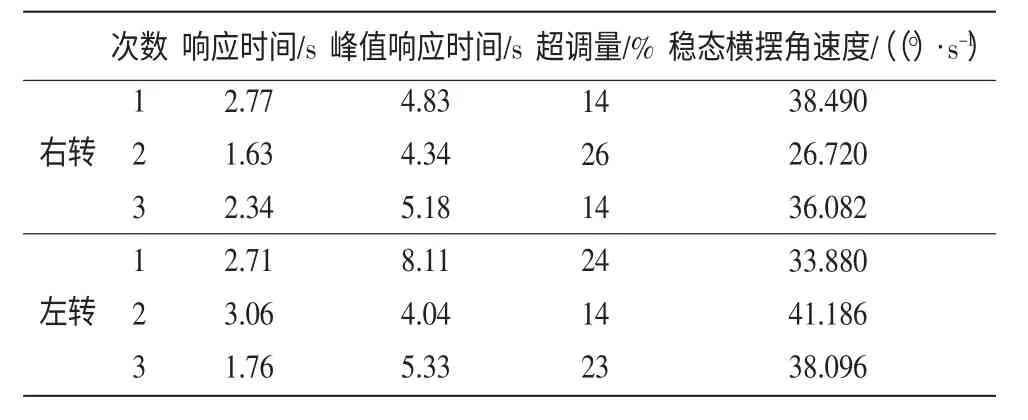
表2 某國產車階躍數據結果
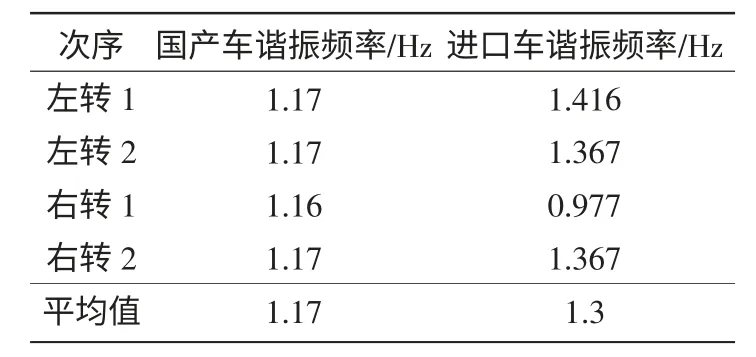
表3 國產/進口車轉向脈沖試驗結果
4)蛇形試驗。
從表4中比較兩車的平均橫擺角速度,說明了進口車的操穩性優于國產車。
5 結 論
1)針對ATV 操縱穩定性試驗評價,開發了便攜式ATV 操縱穩定性測試系統,試驗結果表明,測試分析系統可靠、穩定、滿足要求。
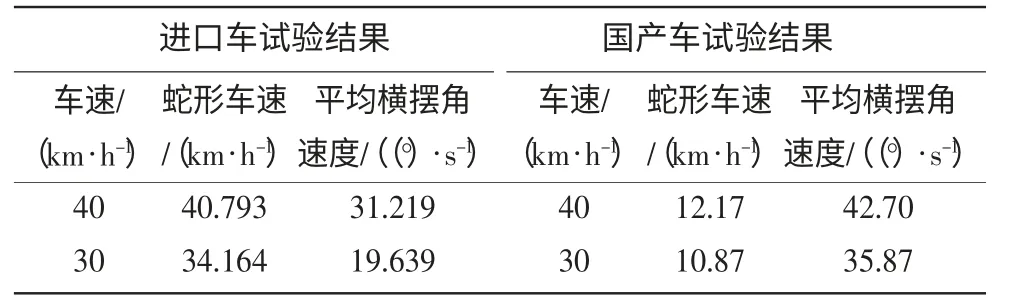
表4 進口車蛇形試驗結果
2)該系統能定性定量的評價ATV 車輛的操縱穩定性,得到的評價指標能夠較好地與乘騎人員的主觀感覺吻合,表明所建立的ATV 操縱穩定性評價方法是合適的。
3)階躍試驗由于轉角難控制,所以試驗結果差距較大,因此后續改進工作是開發相應的儀器增加試驗的重復性。
[1] 李陸山.建設推出JS400“悍虎”全地形車[J].摩托車技術,2005(5):30.
[2] 彭文中.基于ADAMS 的汽車操縱穩定性仿真分析及優化[D].長沙:湖南大學,2010.
[3] 趙榮遠.某跑車操縱穩定性分析和優化[D].長沙:湖南大學,2008.
[4] 羅文水.基于ADAMS 的某跑車操縱穩定性和制動性仿真分析及優化[D].長沙:湖南大學,2007.
[5] 中國工業汽車總公司.QC/T 480-1999 汽車操縱穩定性指標限值與評價方法[S].
[6] Cooper G E.The Use of Pilot Rating in the Evaluation of Aircraft Handling Qualities[M].NASA TND-5153,1969.
[7] International Standard Organization.ISO 4138-2004 Passenger cars:Steady-state circular driving behaviour:Open-loop test methods[S].
[8] Weir D H,Richard J.Correlat ion an Evaluation of Driver/Vehicle Directional Handling Date[R].SAE paper780010,1978.
[9] 馬濤鋒,薛念文.汽車操縱穩定性的研究[J].農機化研究,2005,(3):278-280.
[10] 宗長富,劉蘊博,孔繁森.汽車操縱穩定性的模擬器閉環評價與試驗方法[J].汽車工程,2001,23(3):205-208.
[11] 倪佑民.陀螺儀及其在汽車操縱穩定性試驗中應用的若干問題[J].汽車技術,1975(1).
[12] 徐中明,葉芳,譚海偉,等.基于GPS 的車速傳感器開發[J].傳感器與微系統,2009(6):62-65.
[13] 葉芳,譚海偉.基于GPS 的車速傳感器在汽車操穩性試驗中的應用[J].貴州大學學報:自然科學版,2010(4):86-90.
[14] 倪佑銘.脈沖試驗中轉向輸入有缺陷引起數據處理誤差的初步判斷[C]//清華大學交流論文,1993.
[15] 中國汽車技術研究中心標準化研究所.汽車整車試驗方法標準大全[M].天津:中國汽車技術研究中心,1993.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50