中值濾波在智能車圖像處理中的應(yīng)用
2014-07-04 01:34:00昆明理工大學(xué)機電工程學(xué)院云南昆明650500
機械與電子 2014年7期
關(guān)鍵詞:智能
蔣 旭,吳 濤(昆明理工大學(xué)機電工程學(xué)院,云南 昆明650500)
0 引言
智能車攝像頭對圖像進(jìn)行采集的過程中,由于來自系統(tǒng)內(nèi)部、外部諸多因素的干擾和光學(xué)系統(tǒng)成像時的失真,智能車獲取的圖像與原始圖像相比較發(fā)生了降質(zhì)和畸變,使智能車從中提取到的道路信息減少甚至造成失真。為了讓智能車獲取更為準(zhǔn)確的道路信息,需對圖像進(jìn)行降噪、銳化等處理,以增強圖像。隨著計算機的發(fā)展,降噪方法層出不窮,但是很多方法都是基于計算機發(fā)展起來的,運算量都相對比較大,現(xiàn)階段應(yīng)用比較多且較為簡單的有空間鄰域平均、頻率域低通道濾波和多幅圖像平均等,但處理后會使圖像產(chǎn)生模糊效應(yīng),需進(jìn)行銳化處理,因此,會增加運算量。而智能車賽道邊線的提取是一個簡單而又十分重要的過程,只需對賽道邊線提取并處理,對點、線和尖頂?shù)燃?xì)節(jié)不做處理。
1 中值濾波在智能車圖像處理中的應(yīng)用
中值濾波[1]首先是被應(yīng)用于一維信號[2]處理技術(shù)中,后來被二維信號處理[3-4]技術(shù)所使用。在一定的條件下,可有效地克服線性濾波器所帶來的圖像細(xì)節(jié)模糊,且對濾除脈沖干擾及圖像掃描噪聲最為有效。所謂的“中值”是指將一個數(shù)據(jù)序列中的數(shù)據(jù)按照從大到小(或者相反)的順序排列,如果這個序列的長度為奇數(shù),則排在中間那個數(shù)就是此序列的中值;如果序列的長度為偶數(shù),可以定義處于中間2個數(shù)的平均數(shù)為中值。
1.1 一維中值濾波
最簡單的辦法就是用一個含有奇數(shù)點的條形或者方形滑動窗口[1],在智能車攝像頭采集回來的圖像上逐點滑動,將窗口正中那點的值用窗口內(nèi)各點灰度的中值替代。在一般情況下,可以這樣定義一維中值濾波:設(shè)有一個一維序列 {x1,x2,x3,…,xn},取窗口長度為奇數(shù)m,對此序列進(jìn)行中值濾波,就是從輸入序列中相繼抽出 m 個數(shù),xi-v,…,xi-1,xi,xi+1,…xi+v,i為窗口的中心位置,v=(m-1)/2,再將這m個點按其數(shù)值大小排列,取其序號為正中間的那個數(shù)作為濾波輸出。用數(shù)學(xué)公式表示為:

將智能車攝像頭采集回來的圖像進(jìn)行橫向一維中值濾波,其降噪前后的效果對比如圖1所示。由圖1可知,橫向像素相對變得平和,獨立噪點基本被消除。
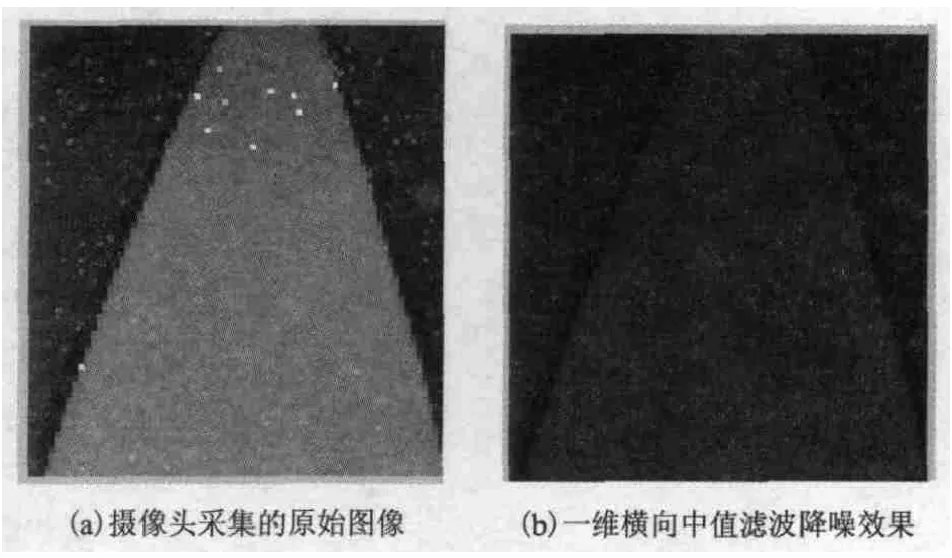
圖1 橫向一維中值濾波的效果對比
將智能車攝像頭采集回來的圖像進(jìn)行縱向一維中值濾波,其降噪前后的效果對比如圖2所示。由圖2可知,縱向像素相對變得平和,獨立噪點基本被消除。

圖2 縱向一維中值濾波的效果對比
1.2 二維中值濾波
采用條形窗口的辦法是一維中值濾波,將這種方法推廣到二維,采用方形窗口,就形成二維中值濾波。對二維序列{xi,j}進(jìn)行中值濾波時,濾波窗口也是二維的,二維數(shù)據(jù)的中值濾波可以表示為:

A 為濾波器的窗口,窗口的尺寸i,j∈Z,xi,j∈A,可取3×3,5×5或者更大。濾波窗口[5]的形狀也不一定拘泥于正方形,可以有多種不同的形狀,如線狀、方形、圓形和十字形等。在實際應(yīng)用中,對于有緩變的較長輪廓線物體的圖像,采用方形或者圓形窗口為宜;對于包含頂尖角物體的圖像,適宜用十字形窗口,如圖3所示。
將智能車采集到的圖像進(jìn)行十字形窗口中值濾波,其前后對比如圖3所示。在細(xì)節(jié)的地方,像素點相對減弱,對比度也相對減弱,但是噪點基本被消除,智能車在對賽道信息[6]的提取過程中只需對圖像進(jìn)行二值化,即可準(zhǔn)確獲取賽道信息,從很大程度上減弱了噪點對賽道信息的干擾,從而提高了微控制器的控制效率[7]。
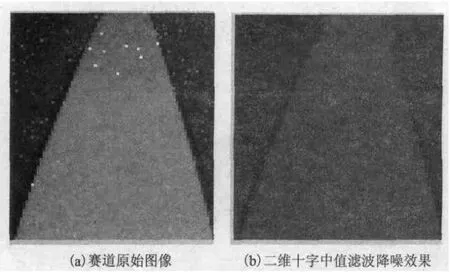
圖3 十字形窗口濾波的前后對比
2 中值濾波圖像頻譜分析
中值濾波常用來減弱隨機干擾或孤立噪聲,對于其性能的分析,由于中值濾波是非線性濾波,因此,要得到一般的定量結(jié)論比較困難。
從頻域[8]的角度來分析,由于中值濾波是非線性的,在輸入和輸出之間不存在一一對應(yīng)的關(guān)系,故不能用一般線性濾波器頻率特性的研究方法。為了能夠直觀定性地看出中值濾波輸入和輸出頻譜變化情況,采用總體試驗觀察方法。
設(shè)X(u,v)為輸入圖像頻譜,Y(u,v)為輸出圖像頻譜,參照線性系統(tǒng)的方法,定義為:

H(u,v)為中值濾波器的頻率響應(yīng)特性。經(jīng)中值濾波后,圖像降噪頻譜如圖4所示。實驗表明,H(u,v)與X(u,v)有關(guān),呈不規(guī)則波動不大的曲線,其均值比較平坦。可以認(rèn)為經(jīng)中值濾波后,傳輸函數(shù)近似為“1”,即中值濾波對信號的頻域影響不大,頻譜基本不變。
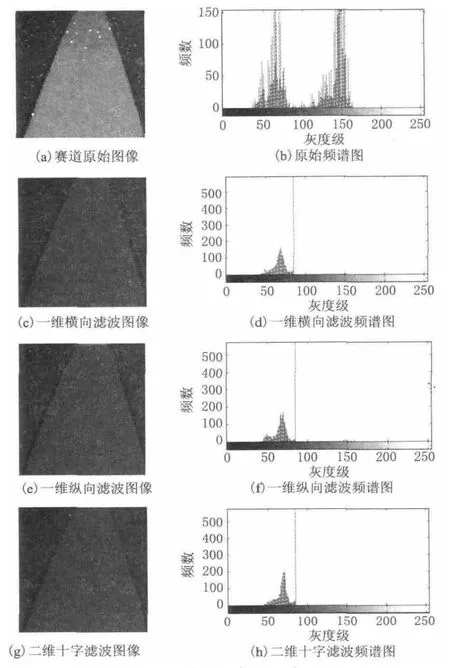
圖4 圖像降噪頻譜示意
由圖4可知,一維中值濾波對圖像的像素有一定的減弱作用,二維中值濾波從很大程度上對圖像的像素有減弱作用,且賽道上的噪點基本被消除。而智能車在賽道信息的提取過程中只需要把賽道和邊界區(qū)別開來,對細(xì)節(jié)無需做處理,可見中值濾波在智能車圖像降噪過程中有很好的實用性和可行性。
3 結(jié)束語
總體來說,和低通濾波器相比較,中值濾波能夠較好地保留原圖像中的躍變部分,非常有效地去除孤立噪聲,但在使用中值濾波時必須注意如何保持圖像中有效的細(xì)線狀物體。而智能車對賽道提取的過程中重點是能準(zhǔn)確地對賽道邊線進(jìn)行識別和提取,不需要對賽道的微小細(xì)節(jié)做處理。中值濾波可滿足智能車圖像處理的要求,有很好的降噪效果,能為智能車提供更為準(zhǔn)確的道路信息。
[1] 朱秀昌,劉 峰,胡 棟.?dāng)?shù)字圖像處理與圖像通信[M].北京:北京郵電大學(xué)出版社,2008.
[2] 許錄平.?dāng)?shù)字圖像處理學(xué)習(xí)指導(dǎo)[M].北京:科學(xué)出版社,2009.
[3] 劉俊山,李旭輝.?dāng)?shù)字圖像處理[M].北京:清華大學(xué)出版社,2013.
[4] Kenneth R Castleman.?dāng)?shù)字圖像處理[M].朱志剛,等譯.北京:電子工業(yè)出版社,2011.
[5] 劉 瑜,朱秀珍.?dāng)?shù)字圖像處理與圖像通訊實驗[M].北京:北京郵電大學(xué)出版社,2008.
[6] 王 建,張曉煒,楊 錦,等.基于視覺傳感器的智能車控制算法設(shè)計[J].微型機與應(yīng)用,2010,29(20):74-76.
[7] 王宜懷,吳 瑾,蔣銀珍.嵌入式系統(tǒng)原理與實踐[M].北京:電子工業(yè)版社,2012.
[8] 白 龍,杜向黨,張 宇,等.基于圖像的SCARA機器人的視覺伺服系統(tǒng)仿真[J].機械與電子,2012(10):75-78.
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學(xué)科學(xué)(學(xué)生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
