提高火力發電企業供電可靠性的幾項措施
2014-07-04 03:26:20張建志
電力安全技術 2014年1期
張建志
(東北電力科學研究院有限公司,遼寧 沈陽 110006)
發電機組能夠長期穩定運行,通常是因為其具有設備質量可靠,保護邏輯合理,自動調節回路過硬,運轉人員經驗豐富、手法嫻熟等4 個特點。保護邏輯中應著重關注跳閘危險點的控制;自動回路問題則依賴于成熟調試人員的精細調試和電廠熱控人員的適時修訂;運轉人員素質則依賴于對運轉人員的教育、培養與模擬機上的反復演練。
1 排除機組跳閘危險點
1.1 溫度保護
超溫跳閘是保護邏輯中涉及得最多的一類保護,如各種輔機的軸承溫度保護、直流鍋爐的再熱器超溫保護、分離器出口溫度保護、汽輪機的軸瓦溫度保護等,因溫度測點斷線,虛連等造成的跳閘事故時有發生。因此,火電廠中設計溫度保護應遵守以下原則。
1.1.1 采用多點組合跳閘,避免單點跳閘
“三取二”是最合理的跳閘組合方式,電廠中重要溫度跳閘點也多采用這種方式。如直流鍋爐的分離器出口溫度保護,通常是分離器左右側各安裝3 個溫度測點,其中每側有2 個及以上測點的溫度達到跳閘值時保護動作。有條件的電廠應盡量滿足此溫度跳閘原則。

圖1 溫度保護邏輯
1.1.2 判斷測點溫度變化率和測點質量
溫度測點通常采用熱電偶和熱電阻作為測量元件,當熱電阻測點斷線或虛連時,會造成溫度值劇烈變化,從而造成測量值的變化速率增大。而正常的溫度升高通常是平緩的,溫度變化率不會超過某檻值。因此,可以通過測點溫度變化速率來判斷測點是否可靠。目前,火力發電廠保護邏輯中多以3 ℃/s 作為溫度變化率檻值,溫度變化速率大于此值則認為測點是壞點,小于此值則認為測點是正常的。此外,每套DCS 系統都有測點質量判斷模塊,如經系統判斷認為所測溫度點為壞點,則不參與跳閘邏輯。圖1 是從中電投白城電廠空冷系統風機溫度保護中截下來的一段邏輯,DCS 采用的是FOXBORO 公司的I/A 分散控制系統。由圖1 可以看出,溫度信號在激發跳閘前,由模塊LIM_3_1進行速率判斷,其參數ROCLIM3.0 表示當溫度變化率超過3 ℃/s 時系統判斷該溫度點變化率超限,即使該點溫度超過設定溫度80 ℃也不跳閘。模塊CALCA_40_1 的BAD 輸入端引入的是測點質量信號,若測點質量壞,則該溫度點也不跳閘。
1.2 機組振動保護
汽機振動包括軸振動和瓦振動2 種,通常將軸振動做到機組保護中去,而瓦振動不參與邏輯保護。軸振動中有相互垂直的X 和Y 方向2 個測點,每個測點能提供振動報警、振動跳閘2 個開關量信號和1 個模擬量信號。傳統的做法是用模擬量信號來顯示振動值,用開關量的報警信號來報警,用跳閘信號做單點跳閘。這種做法對測點的可靠性要求很高,如果振動測點因測量元件或接線出現問題,很容易造成振動誤跳閘。
經過多年的摸索,目前被廣為接受的做法如下,以汽機某軸的X、Y 向軸承振動測點為例,其振動邏輯如圖2 所示。
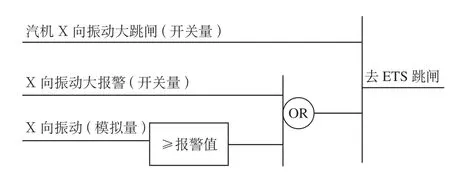
圖2 振動邏輯
1 個跳閘值、2 個報警值,能組成較可靠的跳閘回路。2 個報警值其中一個來自就地開關量,另一個來自模擬量判斷,相“或”后其結果再同跳閘值相“與”,動作后發出跳閘指令。這種回路既避免了因就地跳閘值誤發而造成的誤跳閘,又避免了因報警值的引入而造成的拒動作,可廣泛應用于各跳閘回路,如高加保護、風機振動保護等。
1.3 設備停、送電及檢修狀態引起的安全問題
1.3.1 設備停電可能引發的機組保護拒動
機組的很多保護,如鍋爐主保護(MFT)中往往伴隨著對設備運行狀態的判斷,如2 臺送風機跳閘、2 臺引風機跳閘、2 臺一次風機跳閘等,都會造成鍋爐跳閘。通常取這些設備的“停止”反饋來判斷這些設備是否停止,而要得到“停止”反饋必須對這些設備送電,如果設備因檢修將小車搖出,控制系統將得不到設備已停止這個反饋,則在DCS 系統上看到的設備既沒有運行反饋,也沒有停止反饋,設備顯示故障狀態。假設某電廠因一臺送風機故障在單風機低負荷運行,故障風機在停電檢修狀態,此時,運行的送風機跳閘,則實際上2臺送風機都處于跳閘狀態,鍋爐保護應動作,機組跳閘,但由于控制系統檢測不到檢修風機的停止狀態,不滿足系統跳閘條件,則鍋爐保護拒動作,容易造成危險。解決這個問題的方法有以下2 種。
(1)修改保護邏輯,即在條件判斷中將2 臺設備都“停止”的反饋同2 臺設備都“運行”的反饋非相“或”后作為跳閘條件,如圖3 所示。這種做法可以避免因設備檢修造成的保護拒動,但因增加了一個跳閘因素,因此當設備的運行反饋出現問題時,也加大了設備誤動的幾率。
(2)在設備檢修且機組運行時,通知熱工人員,將檢修設備的“停止”反饋強制上,設備檢修完成后再恢復過來,這種做法要求運行、檢修人員具有較強的責任心。
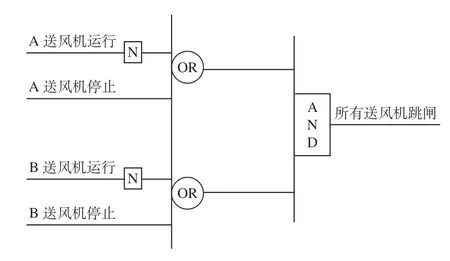
圖3 保護邏輯中的雙反饋狀態判斷法
1.3.2 設備送電引發的誤跳閘
設備送電前系統檢測不到“停止”反饋,送電后其“停止”反饋被系統檢測到,這種情況有時會引起機組誤跳閘。此類事故在中電投白城電廠2×600 MW 新建一號機組的調試過程中發生過1 次。當時機組正處于試運過程中,安裝公司人員將1 臺故障檢修完成后的電動給水泵送電試轉,該送電過程沒有通知熱控調試人員。結果觸發了“1臺電動給水泵跳閘,機組RB 邏輯”,造成了機組誤跳閘。該RB 邏輯中對設備狀態的判斷部分如圖4 所示:送電前系統檢測不到該泵的“停止”反饋,送電后該“停止”反饋出現。于是控制邏輯判斷機組中有1 臺電動給水泵跳閘,作為主要輔機之一的電動給水泵跳閘后,控制邏輯將按照剩余電動給水泵的最大出力來快速降低機組當前負荷,這個過程稱為RB。RB 過程被意外觸發后,尚未完成RB 試驗的機組跳閘。事后分析跳閘原因,主要是由RB 觸發邏輯不夠嚴謹造成的。修改后的狀態判斷邏輯如圖5 所示,該邏輯充分考慮了設備由運行到停止的一個動態過程,這樣就不會因一個反饋的改變而造成邏輯誤判,從而引發不必要的事故過程。

圖4 修改前的電泵跳閘RB 觸發邏輯
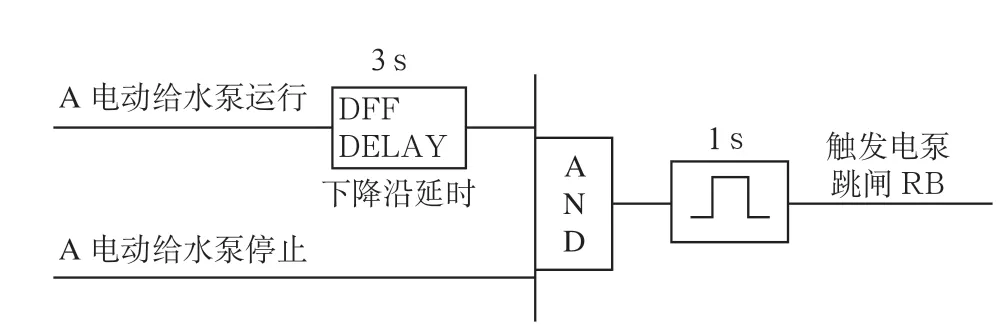
圖5 修改后的電泵跳閘RB 觸發羅輯
1.4 電源切換引起的誤跳閘
為提高設備運行的安全性,火力發電廠中的某些重要設備往往采用雙電源供電,如磨煤機潤滑油泵、空預器等,2 路電源通過1 個切換裝置切換后給設備供電,如果切換裝置切換速度不能滿足要求,往往會造成設備誤跳閘。對于這類設備,調試過程中必須做切換試驗,看切換裝置的切換速度能否滿足要求,如果不能滿足要求,則應更換切換裝置,對于更換裝置有困難的,應在邏輯中加以考慮。國電康平電廠曾在調試過程中發生一起因電源切換速度過慢造成全部磨煤機潤滑油泵跳閘,導致磨煤機跳閘,最終導致機組跳閘的事故。修改控制邏輯,如圖6 所示。通過SR 觸發器,使磨煤機潤滑油泵的控制指令變成長指令信號,該指令在潤滑油泵因電源切換、喪失原電源停止的1 s 內保持不變,當另一電源到來時重新啟動,只要電源切換時間小于1 s,就能夠避免因電源切換而造成的設備誤跳閘。因設備停止1 s 后,該長指令信號被自動復位,所以也不會出現因設備較長時間斷電后突然送電而造成的設備突然啟動現象。
2 提高自動回路的投入穩定性
現代火電機組對自動回路的要求越來越高。性能可靠、品質良好的調節系統是保證機組長期穩定運行的有力保障,為確保火電機組的調節系統時刻處于最優狀態,應注意以下幾個問題。
2.1 要嚴格、足量地做好擾動試驗
要按照DLT657-2006《火力發電廠模擬量控制系統驗收測試規程》的規定,嚴格做好每個調節回路的擾動試驗,要對品質不佳的調節回路進行細調。現在很多火力發電企業在調試結束、投產運行后,都要進行模擬量調節系統的精細化調試,目的就是要使調節系統的性能達到最優,從而保證機組的長期穩定運行。
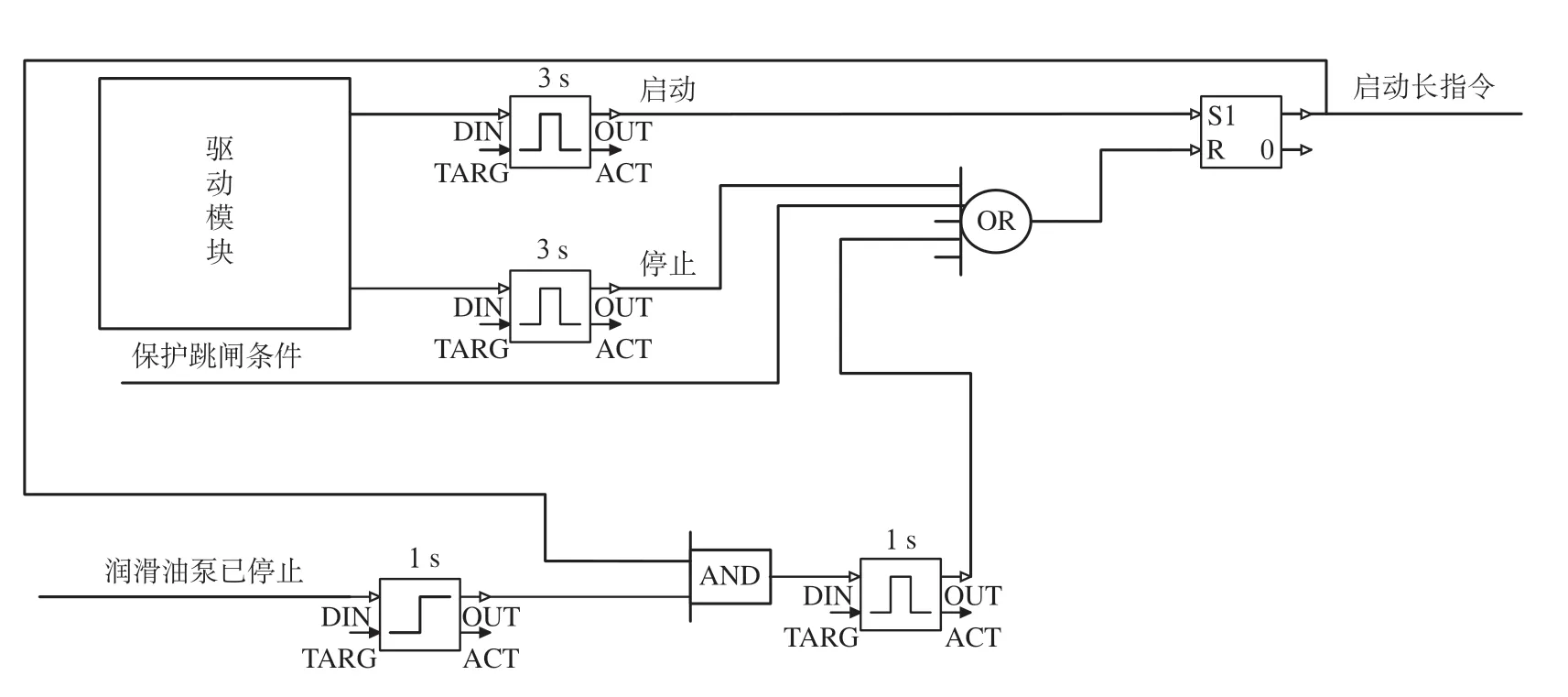
圖6 防止電源切換造成設備跳閘邏輯
2.2 及時修訂調節回路,拓展調節回路適用范圍
機組的運行環境并不是一成不變的,所以應適時地修訂調節回路的控制參數。如當煤質發生較大變化時,應及時修改協調系統鍋爐主控中的負荷-煤量曲線,修改給水控制中的煤量-水量曲線等;當調節回路的執行器被更換時,也要及時修改PID參數,以適應新的執行器的動作特點等。此外,在調試中應投入熱值修訂回路,這樣當煤質發生非顯著變化時,才不會對調節系統的調節品質產生大的影響。
3 提高運轉人員操作手法
運轉人員是機組的操控者,運轉人員業務素質的高低可能直接決定了機組的安全運行時間。自動控制回路的廣泛應用,使運轉人員減少了很多手動操作設備的機會,造成個別運轉人員手法生疏,一旦自動回路出現問題后難以進行有效的緊急處理,造成事故的擴大化。
火力發電企業應著重提高運轉人員對緊急狀態的處理能力,組織運轉人員在仿真機上練習各種事故的緊急處理手法,著重提高運轉人員的設備手動操控能力。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中國特種設備安全(2022年6期)2022-09-20 02:52:28
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00