基于紅外圖像的太陽能電池缺陷檢測
2014-07-02 01:17:20周維芳王志陶楊帆潘國鋒
河北工業大學學報 2014年1期
關鍵詞:檢測
周維芳,王志陶,楊帆,潘國鋒
(1.北華大學電氣信息工程學院,吉林 132000;2.河北工業大學信息工程學院,天津 300401)
基于紅外圖像的太陽能電池缺陷檢測
周維芳1,王志陶2,楊帆2,潘國鋒2
(1.北華大學電氣信息工程學院,吉林 132000;2.河北工業大學信息工程學院,天津 300401)
針對目前太陽能電池缺陷檢測中存在的缺陷檢測種類單一且檢測算法抗干擾能力較差等問題,提出了一種可在復雜背景的紅外太陽能電池圖像中檢測并識別多種缺陷的方法.首先提出了一種快速的局部自適應閾值的二值化處理方法來提取缺陷信息和電極信息;其次做水平投影,定位電極位置,填充電極以消除其干擾;最后采用了一種根據缺陷輪廓信息特征進行分類識別的方法.經過大量實驗驗證,該方法可準確檢測并識別紅外太陽能電池圖片中斷線、隱裂、履帶印等缺陷,檢測準確率可達到99%以上,具有很好的適應性和準確性,大大提高了電池的檢測效率.
太陽能電池;缺陷檢測;水平投影;輪廓;識別
0 引言
太陽能作為一種新型能源,近年來得到了快速發展,太陽能電池作為其主要載體,越來越受到人們的廣泛利用,在太陽能電池生產、加工過程中,由于受設備或是生產環境的影響,很容易給電池片造成斷線、隱裂、履帶印等缺陷,若不能及時發現這些帶有缺陷的電池片,太陽能電池組件的質量將會受到嚴重影響[1],這將會大大降低電池的發電效率和使用壽命,同時也會給生產商造成不良影響,不利于廠商的擴大化生產.目前,依然有很多太陽能電池廠商依靠傳統的人工目視檢測電池表面質量,無法保證產品質量.
高效的太陽能電池缺陷檢測方法越來越受到人們的重視.文獻[2]采用了方向可變濾波器組并結合霍夫變換的檢測方法,可以很好地消除規則直線紋理;文獻[3]對柵線很窄的電池陣列做了研究,較好的去除了柵線;文獻[4-6]使用超光譜成像技術和基于傅里葉的圖像重建等方法檢測隱裂信息;文獻[7]用不同濾波模版來提取近紅外硅太陽能電池中不同缺陷.通過研究發現,盡管已有不少文獻提出了較多的缺陷檢測方法,但這些方法大都存在缺陷檢測類型單一、檢測速度慢、抗干擾能力及適應性較差等缺點.
為了解決復雜背景環境下太陽能電池多缺陷檢測問題,本論文采用了局部自適應閾值二值化方法和形態學處理方法,在突出缺陷和電極的基礎上,采用了水平投影的方法定位電極從而消除電極干擾,最后根據缺陷的輪廓信息進行缺陷的識別與分類.
1 紅外缺陷圖像預處理
利用紅外圖像法檢測太陽能電池越來越受到人們的關注.紅外攝像拍攝到的斷線、黑點、隱裂和履帶印等缺陷如圖1所示.電池片中有兩條橫向貫穿電池的電極,如圖1a)中標記所示.
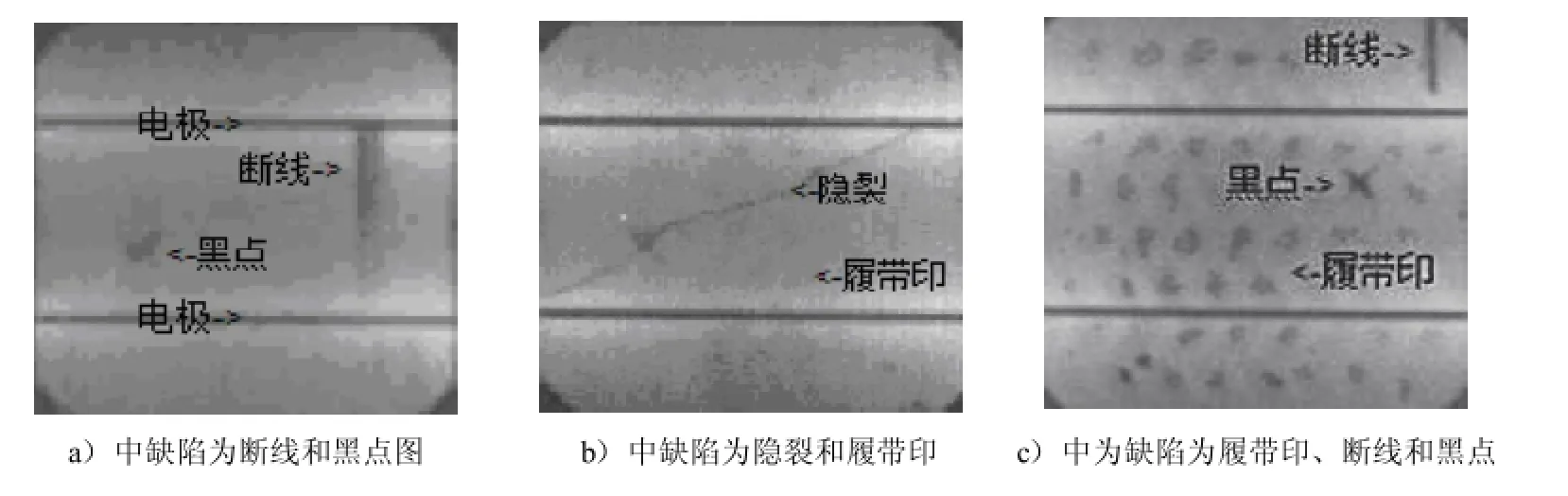
圖1 缺陷類型Fig.1 Defect types
對于上述背景復雜的紅外太陽能電池片,采用普通的圖像分割來提取缺陷信息是很難的,本文利用基于局部自適應閾值的二值化處理及形態學處理增強缺陷信息,并采用水平投影法去除電極干擾,然后提取紅外圖像中缺陷的輪廓信息,為基于輪廓特征的缺陷識別分類打下基礎.
1.1 改進的快速局部自適應閾值二值化處理
為了減少噪聲干擾,對圖像進行小窗口的中值濾波,濾除一些噪聲的干擾.二值化處理方法有多種,常用的有全局固定閾值法,自適應閾值法和OTSU法等.全局法就是用一個固定閾值對整幅紅外圖像進行二值化處理,比較簡單,但在多種情況下受到了限制.本文采用的局部自適應閾值法則是根據像素的鄰域塊內的像素值分布來確定該像素位置上的二值化閾值,這樣,圖像中每個位置像素的二值化閾值不是固定不變的,而是依據該像素周圍鄰域像素的分布而改變,亮度高的圖像區域二值化閾值就較高,反之則較低,具有很強的適應性.
算法思想為:設圖像所在位置i,j的灰度值為fi,j,以奇數值n×n為作為該像素局部鄰域的大小,計算出該塊內像素均值

因為計算時是以逐個像素為中心進行鄰域運算的,水平方向上,每次計算時,當前窗口內變化的像素只是最后列的像素值替換了上一窗口內的第一列的像素值,同理,垂直方向上,變化的是窗口內最上面一行和最下面一行的像素值,為了提高檢測的實時性,提出了一種優化算法,可大大提高計算速度:
1)擴充圖像,當每次以第一列像素值為中心進行鄰域窗口計算時,記錄當前窗口內像素值之和.
2)計算后一窗口內像素值之和時(稱為當前窗口),將前一窗口內像素值之和減去該窗口中第一列的像素值,加上當前窗口中最后一列像素值,作為當前窗口內的像素值之和.
3)循環至圖像第一列時(稱為當前窗口),將垂直方向上臨近的上一個窗口內像素值之和減去其第一行像素值,加上當前窗口中最后一行像素值,作為當前窗口內的像素值之和.
4)循環,直至結束.
為了更加精確的提取出缺陷信息,定義T為二值化閾值

對該塊中每個像素點f i,j用閾值T進行二值化處理

其中:t為局部二值化閾值,0<t<1,若T值越接近于1,則說明該點與周圍像素值就越接近.分塊大小的選擇將影響到二值化的結果,太大或者太小都不能取得較好的二值化效果,根據本文所處理圖像特征,分塊大小選擇的原則是盡量使得每一小塊內均包含有目標與背景像素,并且目標與背景各自內部的灰度范圍變化不大,針對本文所處理圖像,經反復實驗驗證,選擇25鄰域作為分塊的大小最為適宜.
為了更好的得到缺陷信息,使用數學形態學的閉運算來填充物體內細小空洞、平滑邊界,同時也增強了目標區域的聯通性.經上述處理后,如圖2所示.以圖2a)為例,除人眼易于觀察到的斷線、較大的黑點缺陷和電極信息被分割出來外,該算法還將人眼不易觀察到的缺陷提取了出來,如圖2a)中標記所示,充分說明了該算法的精確性.通過圖2a)和圖2b)可以看出,黑點、斷線和隱裂形狀特征未發生變化外,圖2c)中履帶印表現為水平排列整齊的黑點.

圖2 自適應閾值二值化處理方法Fig.2 Themethod of adaptive threshold binarization
1.2 電極定位并填充
對于上述提取電極后的圖片,采用積分投影的方法[8]來定位電極位置.分別對上述運算后的兩幅圖像按照式(4)和式(5)進行水平積分投影.

其中:B i,j為要投影圖像;c為投影圖像列數;r為行數;a i為行積分模值;為投影后的矩陣.以圖2中b)為例,投影得到電極位置.其中:縱軸對應原圖像中行高;橫軸為投影幅值.為了使其更加準確無誤,在求得的電極位置上下擴展兩個像素進行填充.
因為電池片本身背景灰度分布比較雜亂,而電極在接下來的處理過程中又是極大干擾,故將電極擦除.圖3為電極擦除后的效果,很好的去除了電極的干擾.
1.3 提取缺陷輪廓
圖像輪廓特征代表了圖像的很多特征,圖像的輪廓檢測算法是圖像處理中的經典技術,也是難題之一,它對解決高層次的特征描述和識別有著重大影響.
在上述二值化方法處理后,即可提取缺陷區域的輪廓.具體步驟如下:首先找到位于“物體”區域左上角的一個邊界點作為搜索起始點,由左至右、由上到下搜索其八鄰域,找到下一個邊界點,以此邊界點當作初始點繼續搜索,直至回到搜索起始點,記錄缺陷輪廓點,此時將搜索完的缺陷進行標記,避免重復和漏查找,再進行下一缺陷“物體”的輪廓提取,直至遍歷完整個圖像.最后將輪廓畫出,如圖4所示,從圖中可以看出,斷線、黑點、隱裂及履帶印的輪廓被很好地檢測出來.

圖3 投影定位電極Fig.3 Remove thegrid-lines of solar cellby projection

圖4 填充電極Fig.4 Filled grid-linesofsolar cell
文獻[9]在檢測黑點時運用了模版運算來增強黑點像素值,并對比了各種邊緣檢測算子的優劣來進行邊緣檢測,最后運用了二值化處理,處理效果如圖5b)圖所示.如果運用本文所示方法,通過局部自適應閾值二值化和輪廓算法處理后,即可得到該黑點缺陷的輪廓邊緣,如圖5c)圖所示.
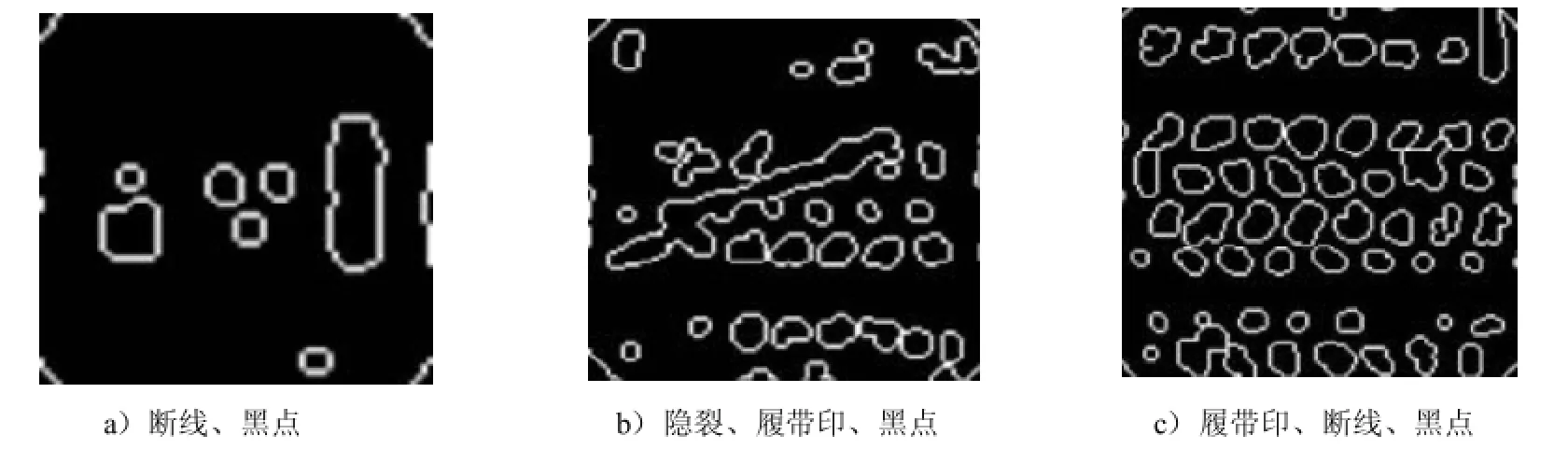
圖5 缺陷輪廓Fig.5 Defect contour
通過對比可以看出,本文方法很好的增強了缺陷信息,充分說明了該方法的有效性.
2 實驗及實驗結果分析
在太陽能電池缺陷檢測過程中,識別缺陷類型具有重要意義,不同的缺陷對應著不同的生產問題,及時發現缺陷并反饋,會極大的提高生產效率,同時也節約了成本.
2.1 特征量的選擇
對圖6中查找到的輪廓存放至序列當中,然后遍歷序列中所有輪廓,將面積小于S的輪廓視為噪聲干擾忽略,將輪廓面積大于S的輪廓用外接矩形表示.在上述缺陷種類中,黑點的面積最小,故選擇圖4中任意25個黑點缺陷作為樣本,計算出其面積,如圖7所示,可以看出,正常大小黑點的面積在45以上,這里將閾值S設定為45.
將滿足上述條件的缺陷用圖8所示的矩形畫出,即根據缺陷邊界點的最大坐標值和最小坐標值,得到了缺陷的水平和垂直跨度.處理效果如圖9所示.

圖6 提取孤立點Fig.6 Outlier detection
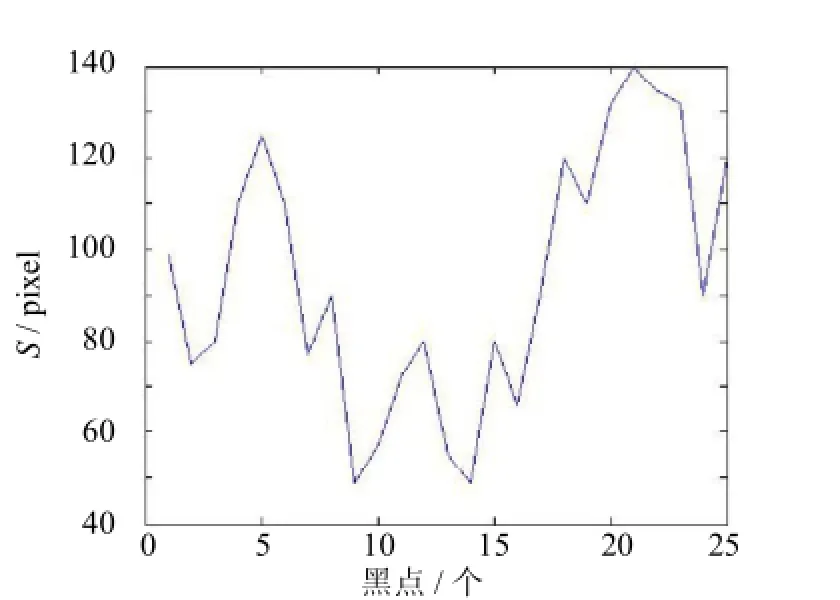
圖7 黑點面積Fig.7 A reaofblack point
輪廓作為識別特征已經得到了廣泛的應用,通過觀察圖9可知,不同缺陷的外接矩形輪廓具有很強的可分性.在保證識別的精度和速度的前提下,盡量減少特征量的使用,而且對于相關性較強、不易判別的特征量也應舍去.根據上述原則,結合缺陷特點,提出了以下特征量.


圖8 缺陷的外接矩形Fig.8 Boundary rectangle ofdefect
3)輪廓數量N:缺陷輪廓外接矩形的數量.該特征量反映了缺陷目標的多少.
4)缺陷中心A x,y:缺陷的中心坐標.通過缺陷輪廓的序列點集,可由文獻[10]快速計算出該缺陷的中心坐標.該特征量反映了缺陷目標的位置相關性.

圖9 外接矩形標記缺陷Fig.9 Defectmarking by boundary rectangle
2.2 分類實驗
所做實驗是在WIN7系統下,以OpenCV2.3版本為平臺,與VisualC++2008混合編程實現的.
因履帶印經處理后是以黑點形式表現出來的,故任選取該類太陽能電池圖片中斷線、隱裂、履帶印缺陷各20個,獲得其輪廓外接矩形,統計特征量中面積比R和長寬比H,如圖10所示.
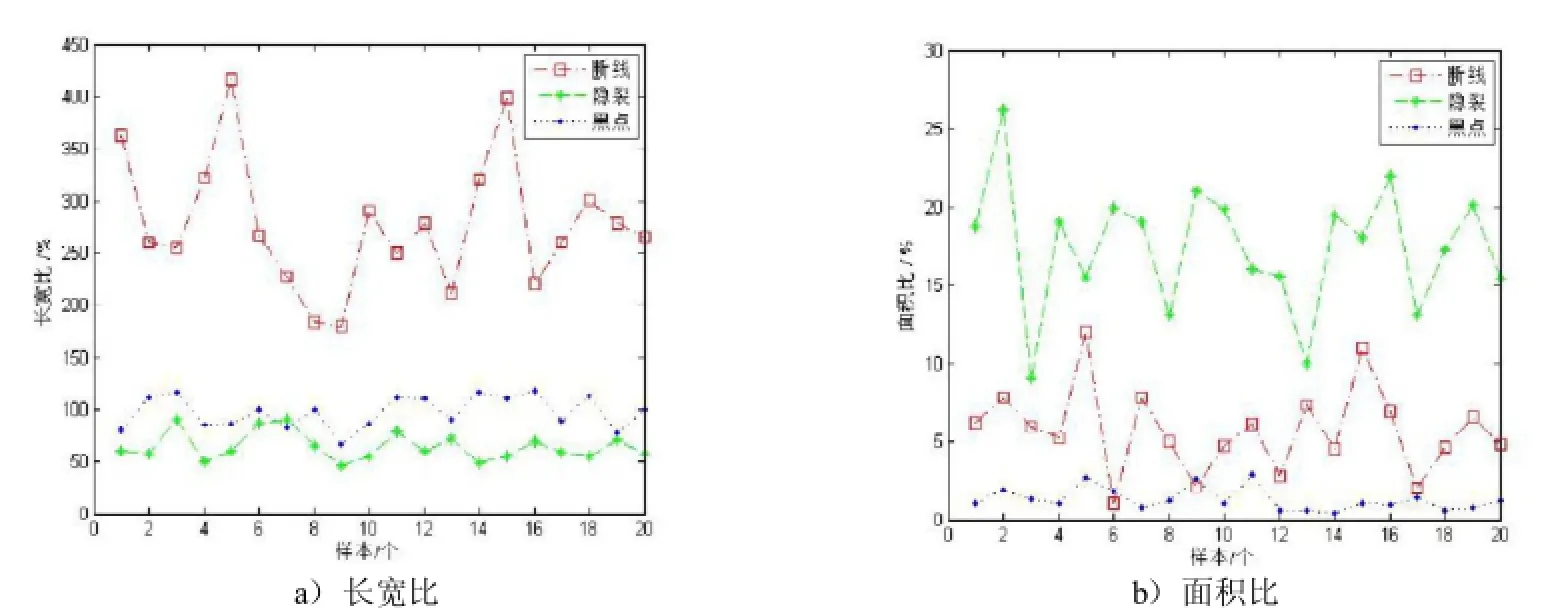
圖10 紅外圖像特征量Fig.10 Characteristic valueof infrared image
圖11中,N0為黑點是否可構成履帶印的閾值數量,N1和N2分別為斷線、隱裂的數目;N3為包括黑點和履帶印形成黑點的總數量;N4為履帶印形成的黑點數目;N為輪廓數量;t1和t2分別為輪廓中心坐標差的絕對值.
選取400張紅外電池缺陷圖片作為樣本,其中斷線、隱裂、履帶印和黑點缺陷各100個.根據分類流程圖可知,不同缺陷識別時閾值的選擇是關鍵.為了確定斷線長寬比閾值H0的大小,通過設置不同的H0求得樣本中斷線的識別率來加以確定,如圖12所示.
當H0較小時,隱裂、黑點和斷線都被識別為斷線,誤判率很高,此時識別率較低;隨著H0越來越大,當大于一定數值時,沒有滿足條件的斷線存在,識別率降低為0.從圖12可以看出,當H0=1.6時,斷線識別率最高,達到100%.
經上述可知,選擇合適H0可將斷線識別出來,此時,樣本庫中缺陷為隱裂、黑點和履帶印.由于隱裂和黑點特征量中長寬比H基本一致,由分類流程圖11和圖10b)知,合適的R0可識別出隱裂.
圖13為除斷線外,在剩余缺陷樣本圖片中,隱裂識別率隨的變化趨勢.當R0較小時,黑點被誤判為隱裂,隨著R0的增大,黑點逐漸被濾除,識別率增高;當R0>0.1時,未被識別的隱裂逐漸增多,識別率降低.從中可以看出在0.05<R0<0.08時,隱裂全部識別出,識別率達到最高.
在識別出斷線和隱裂缺陷后,樣本庫中只剩下黑點和履帶印兩種缺陷,此時根據輪廓數量N和缺陷中心位置,來判定黑點是否為履帶印,由先驗知識,若黑點可構成為履帶印,則N04,并根據圖14可知,當t1=9,t2=3時,隱裂的識別率達到最高.
綜上所述,當選取H0=1.6,R0=0.06,t1=9,t2=3,N0=4時,缺陷的識別率達到最高.為了驗證該算法檢測和識別缺陷的性能,分別選取主缺陷含有斷線、隱裂、履帶印和黑點4種缺陷的紅外電池圖片共1 000張,利用上述方法和所選取的特征量進行缺陷檢測和識別.識別結果如表1.
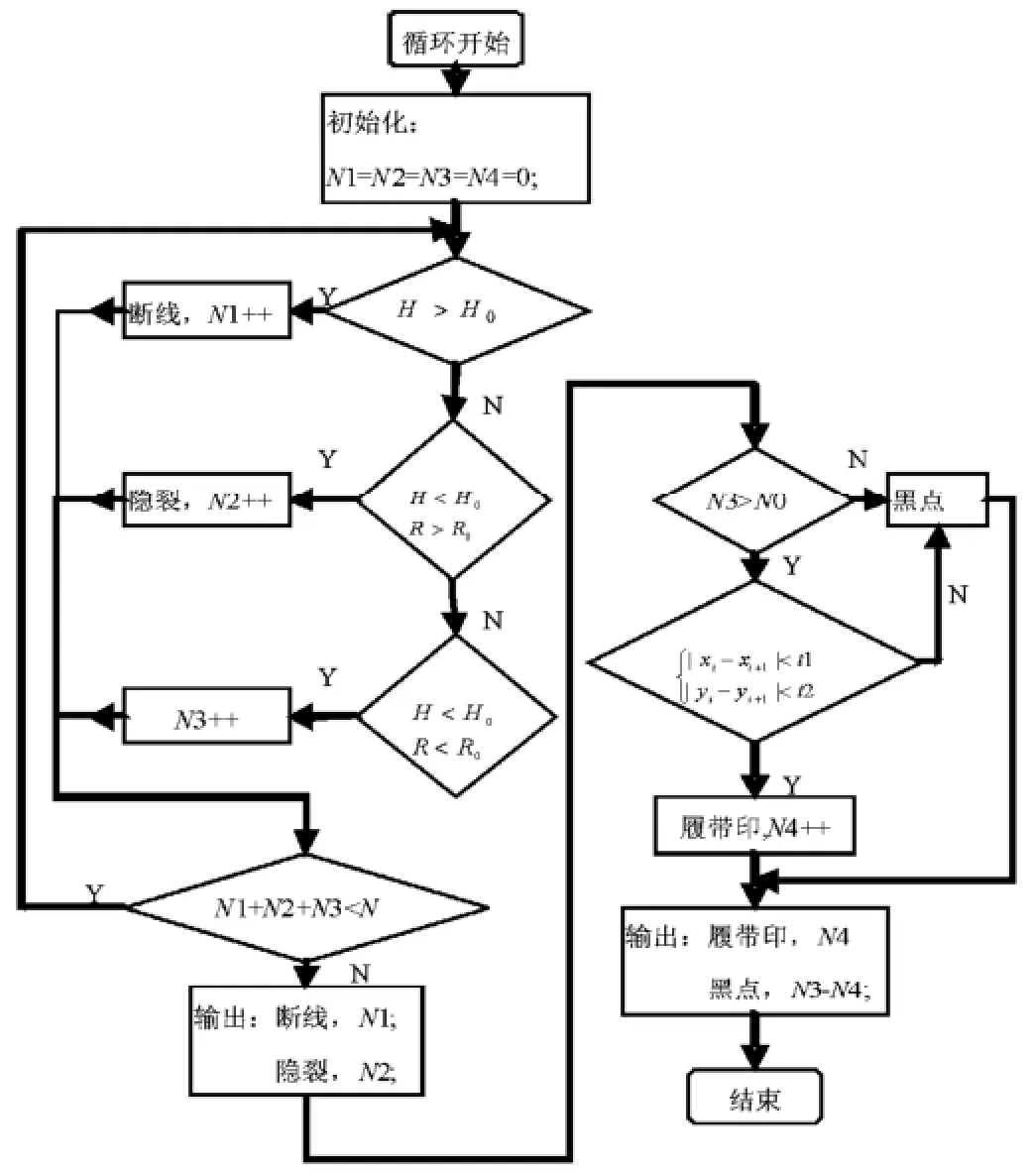
圖11 分類過程流程圖Fig.11 Flowchartof classification
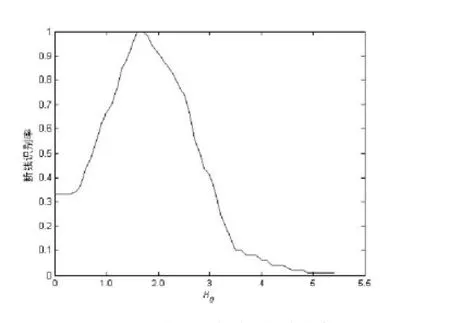
圖12 斷線識別率隨H0的變化趨勢Fig.12 Broken line recognition ratewith the change of H0

圖13 隱裂識別率隨R0的變化趨勢Fig.13 Subfissure recognition ratew ith the changeof R0

圖14 隱裂識別率隨t1與t2的變化Fig.14 Subfissure recognition ratew ith the changeof t1and t2
經分析,該算法檢測到了全部缺陷,并且除黑點之外,對其它缺陷有很高的識別率,尤其是在履帶印的識別上,達到了100%.由于所處理的紅外電池片背景比較復雜,多種缺陷并存的現象嚴重,如果黑點存在于履帶印之中,則很難被區分出來,出現誤判,故識別率較低,但是該算法至少檢測出了是否有缺陷.故本文所提出方法在對上述缺陷的檢測上具有很高的精確性,對1 000幅缺陷圖像檢測率達到100%,缺陷分類準確率在95.57%以上.在目前提出的缺陷檢測和識別方法中,該算法在缺陷檢測上的魯棒性,缺陷分類以及在定位方面的優勢已相當明顯,具有很高的實用價值.
3 結論
采用局部自適應閾值的二值化處理方法并做水平投影來提取缺陷信息和電極信息,定位電極位置,通過缺陷的矩形輪廓信息,檢測斷線、隱裂、和履帶印等缺陷.實驗表明,在設定了合適特征參數閾值下,能很好地識別出斷線、隱裂、履帶印和黑點等缺陷,解決了太陽能電池缺陷檢測的檢測種類單一,抗干擾能力差的問題.最后,經大量實驗驗證,該算法具有很好的魯棒性和精確性,有很高的研究意義和很好的實用價值.
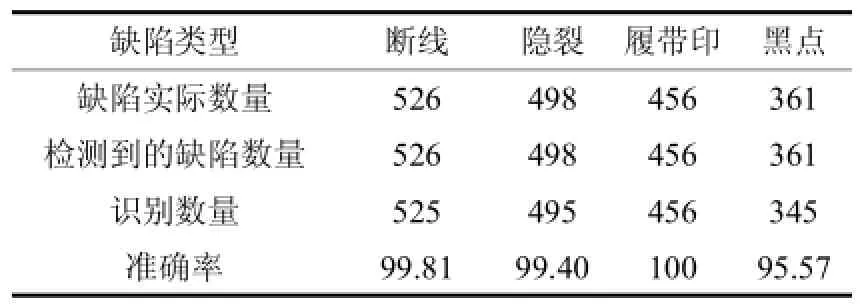
表1 缺陷檢測結果Tab.1 Resultof defect recognition
[1]GasnerS,Anspaugh B,FrancisR,eta1.Theeffectof low energy protonsonsiliconsolarceilsw ith simulated coverglasscracks[C]//Photovohaic SpecialistsConference,Conference Record of the Twenty Second IEEE,1991:1457-1462.
[2]張舞杰,李迪,葉峰.硅太陽能電池紋理缺陷檢測[J].計算機應用,2010(10):13-16.
[3]黃赫.太陽能電池陣列圖像數據分析軟件的設計與實現[D].吉林:吉林大學,2008.21-33.
[4]柳效輝,徐林,肖晨江,等.基于Matlab的圖像處理技術識別硅太陽電池的缺陷[J].上海交通大學學報,2010,44(7):926-930.
[5]LIQing-li,WANGWei-sheng,MaChao,etal.Detection ofphysicaldefectsinsolarcellsbyhyperspectralimaging technology[J].Optics&Laser Technology,2010,42:1010-1013.
[6]Du-M ing Tsai,Shih-ChiehWu,Wei-Chen Li.Defectdetection of solar cells in electrolum inescence imagesusing Fourier image reconstruction[J].Solar Energy Materials&Solar Cells.2012:250-262.
[7]董棟,陳光夢.基于近紅外圖像的硅太陽能電池故障檢測方法[J].信息與電子工程,2010,8(5):539-543.
[8]孟春寧,白晉軍,張太寧,等.基于梯度積分投影和最大期望算法的人眼定位[J].光電子·激光,2012,23(10):1971-1976.
[9]劉鶴.太陽能電池缺陷檢測系統的軟件設計[D].武漢:華中科技大學,2009.39-44.
[10]姚春光,谷一鳴,馬崎,等.不規則形狀圖像矩特征的一種快速準確算法[J].自動化技術與應用,2003,22(9):21-24.
[責任編輯 代俊秋]
Detection of solar celldefectsbased on infrared image
ZHOUWei-fang1,WANG Zhi-tao2,YANG Fan2,PANGuo-feng2
(1.Schoolof Electrical Information Engineering,Beihua University,Jilin 132000,China;2.Schoolof Information Engineering, HebeiUniversity of Technology,Tianjin 300401,China)
To solve theproblems thatsingledefectdetection typesand bad anti-interferenceability of testalgorithm in tests of infrared solarcellsdefections,anew method isproposedwhich can defectand identify variousdefections in com plicated background of the solar cells pictures.Firstly,amethod of localadaptive thresholding binarization isused to extract the messagesofdefectionsand electrodes.Second ly,horizontalprojection can beused to getthepositionsofelectrodes,then interferencescan beelim inated by filling electrodes.Finally,amethod which can classify according todefectionscontour information isused.A largenumberofexperimental resultsdemonstrate thatourmethod can detectand identify thebroken line fault,crack faultand track prints faultaccurately in the infrared imageof solar cells,and the correctrate isover99 %.Themethodwith good adaptation and accuracy improves thesolar cellsdefectefficiency greatly.
solar cells;defectdetection;horizontalprojection;contour;identify
TP391.41
A
1007-2373(2014)01-0008-07
2013-09-12
國家科技重大專項課題(2009ZX02308-004)
周維芳(1970-),女(漢族),實驗師.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48