一種精確測量螺旋槳重點位置的方法
2014-07-01 23:36:13孟現召仲志丹
機械工程師 2014年4期
孟現召, 仲志丹
(1.中國民航飛行學院洛陽分院機務工程部,河南洛陽471001;2.河南科技大學機電工程學院,河南洛陽471023)
一種精確測量螺旋槳重點位置的方法
孟現召1, 仲志丹2
(1.中國民航飛行學院洛陽分院機務工程部,河南洛陽471001;2.河南科技大學機電工程學院,河南洛陽471023)
螺旋槳作為一高速旋轉部件,由于制造和裝配誤差,造成螺旋槳在裝機后重心和旋轉中心不重合,以及各槳葉上氣動力不完全一致,從而使螺旋槳在高速旋轉過程中產生振動。文中討論一種精確測量螺旋槳重點位置的方法,可為正確進行螺旋槳動平衡提供參考。
螺旋槳;振動;測量;重點;方法
0 引言
在航空螺旋槳式動力裝置上,由于螺旋槳橫向尺寸大、葉片數目少,故單葉葉片的質量和承載相對較大。在實際制造和裝配過程中,各槳葉的外形和質量分布不可能做到絕對一致,使得槳葉裝配在槳轂上成為一件完整的螺旋槳以后,制造和裝配誤差會造成螺旋槳在裝機后重心和旋轉中心不重合,產生靜不平衡;相對于靜不平衡,在螺旋槳高速旋轉過程中由于各槳葉的重心不在同一旋轉平面上,以及各槳葉上氣動力不完全一致引起各槳葉氣動力的合力作用點偏離旋轉中心,則產生動不平衡。所以在螺旋槳裝機后的實際工作過程中產生的振動是動、靜不平衡力的復合[1]。這種振動除了使航空器上乘員感到不適外,還使航空器相關部件承受很大的交變載荷,造成結構疲勞破壞,所以必須對螺旋槳進行動平衡配平,以降低其振動值水平。
以螺旋槳的旋轉中心為中心、以螺旋槳槳轂周緣為圓周的圓平面上,螺旋槳重心所在半徑就是螺旋槳的重點位置,與重點呈180°對稱的半徑就是輕點位置。在實際的工程實踐中,對裝機后的螺旋槳進行動平衡配平實際上就是先找到重點位置,再找到輕點位置,然后在輕點位置上安裝合適重量的配重[2]。這就提出了兩個方面的問題,即振動值的大小和重點的位置,其中振動值的大小可以直接由振動值傳感器進行探測,故本文主要討論如何對螺旋槳的重點位置進行精確測定。
1 螺旋槳-發動機振動系統的振型分析
由于螺旋槳的重心G偏離了其旋轉中心D,設偏心距為e,螺旋槳質量為m,螺旋槳與發動機的總質量為M,螺旋槳轉速為ω,則其離心力F=meω2,該力通過螺旋槳轉軸沿法線方向經支撐軸承傳遞給發動機,使發動機以點O為中心、以r為半徑進行同步弓形回旋運動,其運動特征是在轉動中O、D、G三點保持固定的相對位置,如圖1(a)。
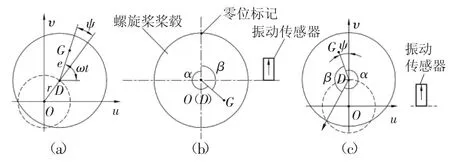
圖1
以螺旋槳與發動機作為振動系統,用(u,v)表示螺旋槳旋轉中心D的位置,則螺旋槳重心G的位置為(u+ecos(ωt),v+esin(ωt)),如圖1(a);設阻尼為c,剛度為k,由牛頓第二定律得到發動機的運動微分方程為:
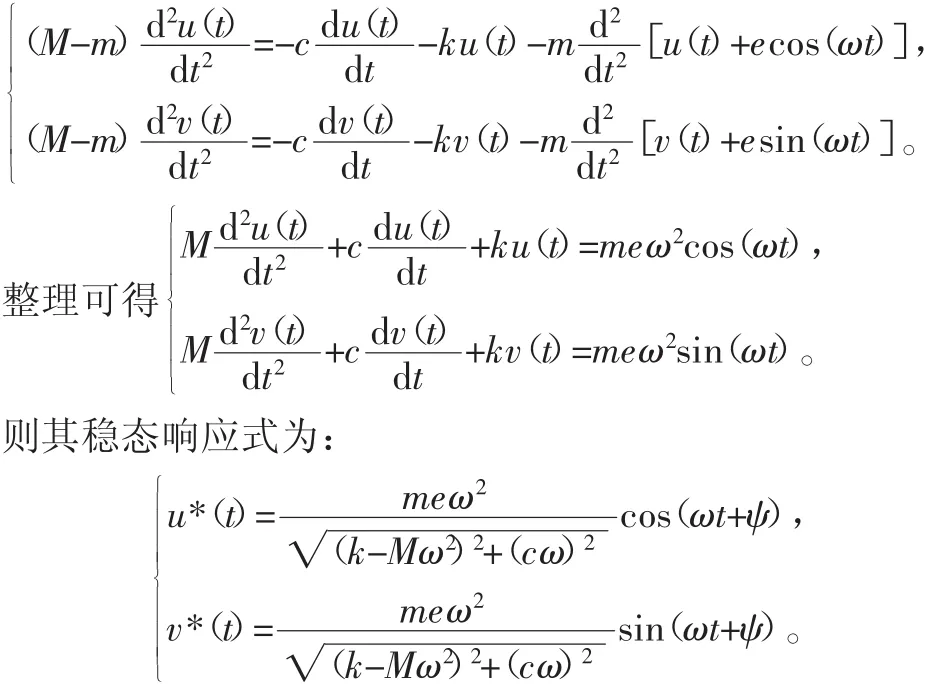
可見發動機的振動是頻率與螺旋槳旋轉同頻、等幅、相位恒定的簡諧振動,激振力是螺旋槳的偏心質量離心力F=meω2。
2 振動值量的測量
振動值傳感器屬于速度傳感器,探測的是振動物體在單位時間內的振動位移;它具有方向性,在殼體上會有安裝方向的標識。振動值傳感器安裝在發動機機匣上靠近螺旋槳安裝法蘭的位置[5],測量發動機機匣單位時間內的振動位移。在航空維修業內廣泛地應用Chadwick Helmuth公司生產的Vibra2000型螺旋槳振動值測試儀,其配備的振動值傳感器上就有一個箭頭標記,要求安裝時必須將箭頭指向朝上安裝[3],所以它只能正確探測豎直向上的振動。在本螺旋槳—發動機振動系統研究中,我們以該型傳感器為例,只關心在豎直方向上發動機機匣的振動位移。

可見振動值傳感器的輸出波形是機匣振動位移波形的跟隨。由于在實際進行動平衡配平時并不知道螺旋槳重點的位置,選取的零位參考標記具有隨機性,即螺旋槳重點位置與參考零位標記二者所在半徑之間夾角α一般不會恰好等于零,如圖1(b),所以有α+β=2π,又有:

振動值傳感器的方向性決定了其輸出波形圖為一余弦波的正半幅,如圖2(c)。
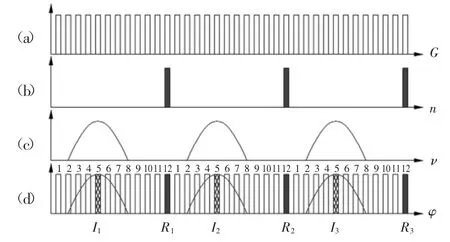
圖2
振動值傳感器只能輸出振動值的大小,這對于進行螺旋槳的動平衡配平是不夠的,如前所述,進行正確配平還需要知道重點的位置。
3 重點位置的測量
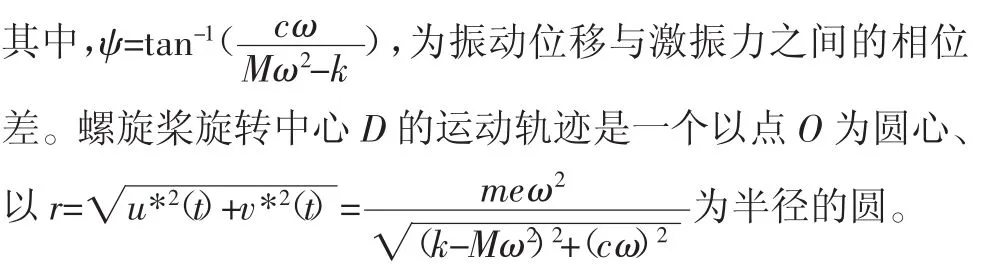
由于令ψ=0,所以當螺旋槳旋轉中心O與螺旋槳重心G之間的有向線段OG方向與振動值傳感器殼體上箭頭方向一致時,振動值傳感器輸出信號幅值最大,如圖1(c),此時有φ+α=2π,則φ=β。可見,只要測出β的大小,即可得到螺旋槳重點所在半徑與參考零位標記之間的夾角,即可得到重點的位置。
要實施此項測量,需進行以下步驟:
1)時鐘脈沖。時鐘脈沖是由專門的時鐘脈沖發生器產生的矩形脈沖,它的工作頻率非常穩定和準確,如圖2(a)。時鐘脈沖的頻率f為定值,根據式T=1/f可得到一個時鐘脈沖所占用的時間,用來提供時間基準。
2)轉速脈沖。轉速脈沖來自轉速傳感器;視所采用的轉速傳感器的類型在槳轂上零點標記位置貼上反光鋁箔或安裝磁性塊[3],總之需要使槳轂上的零點標記通過轉速傳感器探頭時轉速傳感器即輸出一個脈沖信號,如圖2(b)。由計數器統計相鄰兩個轉速脈沖Rn與Rn+1之間時鐘脈沖的個數X,螺旋槳的轉速n即可由式n=60f/X得到,單位為r/min。螺旋槳旋轉一周零點位置經過轉速探頭一次,轉速傳感器輸出一個脈沖信號,可見轉速脈沖實際上起到了零位同步傳感器的作用,它的出現標志著螺旋槳旋轉中新的一轉開始了。
3)振動脈沖。振動值傳感器輸出振動脈沖,然后由取樣電路對其進行實時取樣、保持和對比,獲取其最大值,得到振動值的大小。
4)重點位置。如圖2(c),從獲取到一個轉速脈沖Rn開始至獲取到下一個轉速脈沖Rn+1止,螺旋槳轉過完整的一周,在這期間必然會有一個振動脈沖In出現;統計從轉速脈沖Rn開始至振動脈沖In出現期間時鐘脈沖的個數X1,統計振動脈沖In與一個轉速脈沖Rn+1之間的時鐘脈沖的個數X2,由式φ=2πX1/(X1+X2)得到角度β,則

就是說,從選定的零點位置所在半徑開始,逆時針轉動α角后就是重點所在的半徑。
需要注意的是,本方法能夠得出正確結果的前提是每相鄰的兩個轉速脈沖Rn與Rn+1之間的時鐘脈沖數目是相等的,即螺旋槳應該處于勻速轉動的狀態;如果螺旋槳處于加速或減速的過程中,將導致測出的∠α大小出現較大的偏差。
重點位置測出后,即可結合振動值傳感器輸出振動值的大小對螺旋槳進行動平衡配平。
[1] HartzellPropellerInc.HartzellPropellerOverhaulandMaintenance Manual(Revision 39)[M].Hartzell Propeller Inc.,2010.
[2] 葛漫江,王凱.螺旋槳振動的外場檢測和排故[J].航空維修與工程,2001(3):44.
[3] Honeywell Aerospace.Chadwick Helmuth vibrex 2000 Operator’sManual[M].Honeywell Aerospace,2000.
[4] 林遠東.偏心質量引起旋轉系統振動的動力學研究[J].機械設計與制造,2008(5):29.
[5] 屈玉池,張永峰,趙述元,等.螺旋槳振動傳遞試驗研究[J].航空發動機,2009,35(1):33-36.
(編輯:啟 迪)
Accurate Detection Method of Heavy Spot on the Propeller
MENG Xianzhao1, ZHONG Zhidan2
(1.Maintenance Engineering Department,Luoyang College,Civil Aviation Flight University of China,Luoyang 471001,China; 2.College of Mechanical Engineering,Henan University of Science and Technology,Luoyang 471023,China)
Because of the errors in manufacturing and reassembling,the barycentre of the propeller will deviate from its rotation centre,and the aerodynamic force brought from every blade is not exactly the same,these factors will make the propeller vibrating when it is in high-speed rotating.A accurate detection method of heavy spot on the propeller is proposed to provide a good reference for the procedure of propeller dynamic balance.
propeller;vibration;detection;heavy spot
V 211.44
A
1002-2333(2014)04-0023-03
孟現召(1975—),男,工程師,研究方向為航空器維修;仲志丹(1975—),男,教授,博士學位,研究方向為工業自動控制系統、先進能源技術。
2014-02-07
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44
汽車與新動力(2014年2期)2014-02-27 12:10:15
