改進的Rao-Blackwellized粒子濾波算法在目標跟蹤中的應用
2014-06-28 16:44:24張萬里何金剛趙紅梅
兵器裝備工程學報 2014年7期
關鍵詞:測量
張萬里,何金剛,趙紅梅
(1.中國空空導彈研究院,河南洛陽471009; 2.中國航空工業集團公司洛陽電光設備研究所,河南洛陽471009)
改進的Rao-Blackwellized粒子濾波算法在目標跟蹤中的應用
張萬里1,何金剛1,趙紅梅2
(1.中國空空導彈研究院,河南洛陽471009; 2.中國航空工業集團公司洛陽電光設備研究所,河南洛陽471009)
在雷達信號處理領域,運動目標跟蹤問題一直是研究的重點,涉及的非線性濾波問題是難點所在;以Rao-Blackwellized粒子濾波(RBPF)算法為基礎,針對其應用于雷達目標跟蹤時產生的若干問題進行研究,為提高算法的收斂性能及濾波精度,對其中重采樣算法進行改進,利用數字仿真對更改后的算法進行驗證,經過表明更改后的RBPF算法在各個方面均有較大程度改善。
粒子濾波;RBPF算法;雷達目標跟蹤;重采樣
在雷達信號處理領域,如何實現精確的運動目標估計與跟蹤,一直是長期以來的研究的重點所在。20世紀60年代已證明在線性高斯系統中利用最小均方根誤差準則進行目標狀態估計的Kalman濾波方法[1]是最優的估計方法,但針對非線性非高斯系統,盡管采用局部線性化近似的擴展Kalman濾波(Extend KF,EKF)[2]以及確定性采樣的Unscented卡爾曼濾波(Unscented KF,UKF)[3]方法可以解決一定形式的弱非線性,弱高斯條件下的目標跟蹤問題,但由于其對動態模型的限制過強,在實際應用中大多無法滿足應用前提,20世紀90年代出現了以粒子濾波(Particle filter,PF)[4]為代表的非線性濾波方法,即利用蒙特卡羅采樣得到的隨機樣本(也稱為粒子)的加權和來近似狀態的整個后驗概率密度,其本質是采用蒙特卡羅仿真來獲得高維積分的近似數值解,并用以解決各種估計問題。
粒子濾波面臨實踐中面臨兩個最大問題,一是粒子退化問題,即經過若干次迭代后,重要性權值可能集中到少數粒子上,這些粒子已經不能有效表達后驗概率密度函數,為解決此問題,Gordon等[5]提出了重采用方法,其思想是減少權值較小的粒子數,增加權值較大的粒子數。另一個問題是采用粒子數目過多導致計算的復雜度增加,當前的解決方法主要是從系統模型出發,利用模型自身的特性來提高濾波器性能。Rao-Blackwellized方法[6]即將線性狀態從系統中分離出來,利用Kalman濾波器對線性狀態進行估計,利用粒子濾波對剩余的非線性狀態進行估計,后基于貝葉斯定理求取狀態的后驗概率。由于RBPF降低了粒子濾波狀態的維數,與使用相同粒子數的傳統PF算法相比,可以獲得更優的性能。
當前的Rao-Blackwellized粒子濾波(RBPF)中的重采樣雖然可以一定程度上緩解權值退化的現象,但同樣也會帶來粒子貧化的問題;同時采用單一系統模型作為Rao-Blackwellized粒子濾波中近似線性狀態的估計,在跟蹤機動目標時與真實飛行軌跡存在偏差,因此為解決此類問題,本文采用權重分區并實施改進的重采樣算法的方法在大權值與小權值粒子之間對權重重新計算以獲取新粒子,從而實現粒子狀態的估計,同時以僅有角度信息的雷達雙目標跟蹤問題為例,對改進的算法進行驗證。
1 Rao-Blackwellized粒子濾波算法
1.1 粒子濾波算法原理
解決目標跟蹤問題的最優方法是貝葉斯濾波方法,它通過兩個步驟來實現:狀態預測和狀態更新。貝葉斯濾波的實質是通過獲得目標的后驗概率密度,根據某些準則(如最大后驗估計)近似地計算出目標狀態值。定義系統模型如下:

其中xk為目標在k時刻的狀態,如目標的位置、速度、加速度等信息。yk為k時刻的測量值,如目標的位置、彈目距離、目標與傳感器的相對角度等。p(xk|xk-1)為目標的動態模型,表征目標狀態的動態變化情況,p(yk|xk)為系統的測量模型,表征目標在干擾情況下的測量變化情況。最優濾波的目的就是為了在已知觀測信息z1:k的前提下獲得目標的后驗概率p(xk|z1:k)。
利用Chapman-Kolmogoroff公式可得目標的后驗概率密度為

式(2)從理論意義上提供了最優濾波問題的解決方法,但在非線性系統求解過程中無窮維積分的運算極為困難,無法得到其精確最優解。
1.2 Rao-Blackwellized粒子濾波算法流程
在Rao-Blackwellized粒子濾波算法中,引入任意潛在變量λ,系統的動態模型和測量模型分別變為p(xk|xk-1,λk-1)和p(yk|xk,λk),已知重要性分布為π),對當前粒子群進行處理,其中m為均值,P為協方差,ω為粒子權重,N為粒子數。在K時刻,Rao-Blackwellized粒子濾波算法的流程如下:
1)對粒子均值m和協方差P做卡爾曼濾波預測:

2)根據相應的重要性分布,更新潛在變量λ(i)k:

3)計算新的權重:

4)歸一化權重:

對粒子均值m和協方差P做卡爾曼濾波更新:


利用RBPF算法可將多目標跟蹤問題分為兩個部分:多目標數據關聯中后驗概率分布的估計和基于數據關聯單個目標跟蹤的估計。可以分別通過序列重要性采樣及Kalman濾波進行最小均方誤差估計來解決,將跟蹤過程簡化為目標判別,即判別當前得到的測量值是目標還是雜波,并在此基礎上對目標進行跟蹤。
通過設定數據關聯指標Ck,當Ck=j時表示當前測量值對應第j個目標,當Ck=0時表示當前測量值經判別為雜波。
為使用RBPF濾波算法,必須首先確定一個重要性分布用以計算不同時刻k各個粒子的權值,即確定分布π(ck|,利用貝葉斯公式可以方便求取概率密度p(ck|),因此RBPF算法默認將p()作為最優的重要性分布π來計算。


2 RBPF算法改進
在采用RBPF算法解決雷達目標跟蹤問題時,發現了當前算法存在的一系列問題,包括重采樣算法導致粒子貧乏性增加以及EKF或UKF算法導致預測精度較低等等,嚴重可能導致濾波算法發散,為此本文對以上算法進行適應性改進,以適應雷達目標跟蹤問題更好的解決。
RBPF算法重采樣的目的是為了緩解權值退化現象,即避免在權重較小的狀態處散步同樣概率的粒子數目導致計算復雜度增加的問題,其本質是以犧牲粒子多樣性來減小計算量和提高魯棒性,但通過若干次迭代可能會導致重要性權值集中到少數粒子上,這樣當目標機動時狀態變化頻繁,此時可能導致粒子貧化進而濾波無法收斂到目標實際的狀態。在利用RBPF算法針對雙目標跟蹤問題進行仿真時發現,常常出現濾波算法發散的情況,經分析此問題為重采樣導致粒子貧化所致。
為解決此問題需在重采樣時適當增加粒子的多樣性,可采用改進的重采樣算法,即改變重采樣后權重的分配方式,這樣處理雖然可能增加一定的計算量,但同時會很大程度上避免粒子貧化的問題。具體的計算步驟如下:
1)首先按照重采樣前的權重將粒子分為高、中、低權重3個域,對于中權重域的粒子直接保留,為保證粒子的多樣性,對低、高權重域的粒子重新分配。
2)假設低、中權重的粒子共有n個,將這兩個域的權重重新歸一化后,得到新的權重,計算這兩個域粒子歸一化后的權重加權和:

其中[]代表小數的取整部分。
3)重采樣之后的低、高權重的新的權重計算如下:

改進的重采樣的算法相比當前的重采樣的算法在保留中權重對粒子影響的基礎上,能夠適當增加小權重粒子的比例,不會像原始重采樣算法那樣降低粒子的多樣性,當目標實施機動狀態突變情況下提高濾波跟蹤的可靠性,能夠有效地避免濾波算法發散。
3 仿真實現
3.1 單目標跟蹤的數字仿真實現
首先以雜波環境跟蹤獨立目標的情況進行分析,系統的狀態為目標的兩維位置與速度,即:

其離散化的狀態方程為

其中qk-1為離散高斯過程噪聲。f1(Δt)、f2(Δt)描述目標在X向和Y向速度的變化情況。

然后針對雜波環境進行建模,可雜波測量值建模為視場范圍內任意隨機值,由于是針對于單目標跟蹤的問題,因此數據關聯因子ck為0和1兩種狀態。且:

下面針對此問題分別采用線性Kalman濾波及RBPF粒子濾波來仿真,采用粒子數目為10。從圖1可以看出,采用kalman濾波得到的目標運動軌跡輸出完全不能夠跟蹤上目標的真實運動軌跡,這是因為目標的觀測模型中不止存在高斯噪聲,而是在整個視場內存在均勻散步的雜波測量值,這樣導致Kalman濾波算法很快失效。

圖1 采用Kalman濾波的估計結果
圖2 ~圖4給出了采用RBPF粒子濾波的結果,從圖中可見,粒子鋁箔可以較好的分辨出目標運動軌跡及雜波,并通過數據關聯參數表示出來。
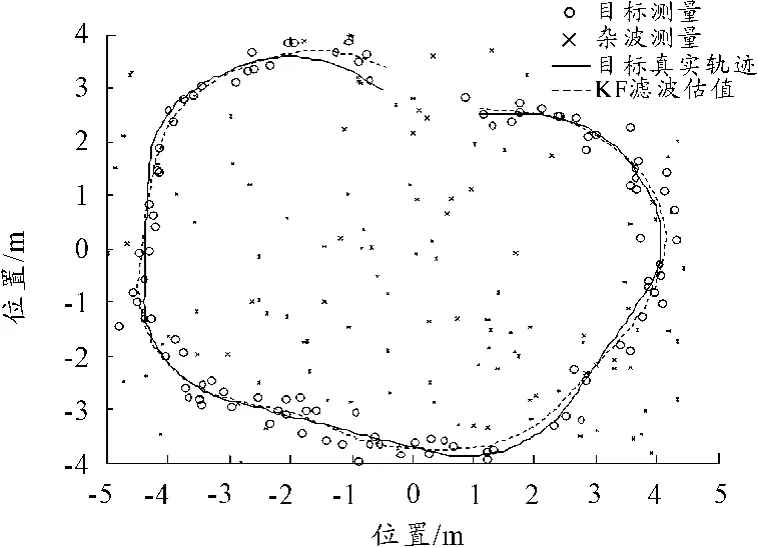
圖2 粒子濾波得到的目標運動軌跡
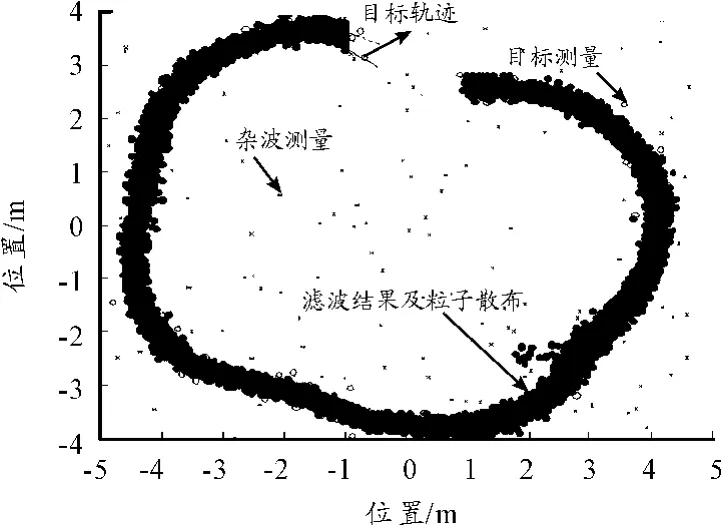
圖3 粒子濾波得到的目標運動軌跡及粒子散布情況
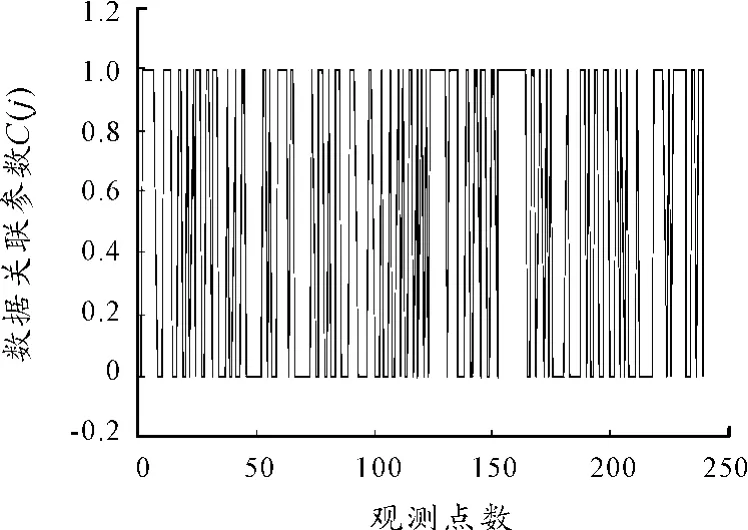
圖4 數據關聯參數ck
3.2 雙目標跟蹤的數字仿真實現
下面對僅有方位角測量信息的雷達雙目標跟蹤問題進行仿真驗證,圖5為雷達測量的示意圖,此時目標的動態方程與上例中相同,但測量模型不同,此時測量量為角度值,使用兩個固定位置的傳感器對于兩個目標進行測量,測量方程如下:

其中xj,k,yj,k為目標j的位置,,為第i個傳感器的位置,~N(0,σ2)為測量噪聲,此時測量方程為非線性形式,因此需采用EKF或UKF配合使用RBPF算法。
圖6給出了雷達的角度測量值隨時間的變化情況,從圖6中可以看出,針對兩個傳感器及兩個目標可測量得到4組測量值,同時在視場范圍內存在一定數量的雜波測量值。
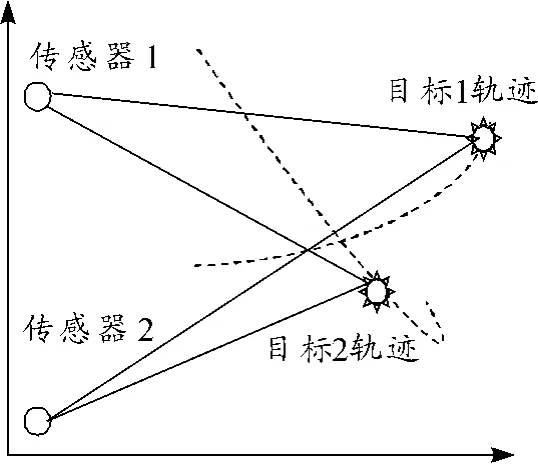
圖5 雙目標雷達測角示意圖

圖6 雷達角度測量值隨時間的變化關系
從圖7可見,采用原始RBPF算法得到的目標軌跡估值與真實值在飛行中段明顯存在一定的偏差,從粒子散布的變化情況看,在這一階段采用的粒子無法覆蓋真實軌跡造成其估值與真值逐漸偏離,且在偏離時刻明顯兩個目標的測量值較為接近。可以通過增加粒子數目來解決此問題,但這會大大增加算法的計算量。經進一步分析可知由于實時調用RBPF算法計算的有效粒子數目neff未必能夠反映目標機動情況下的運動軌跡,當前權值較小的狀態未必不是后期的真實狀態,重采樣導致粒子集中在當前權值較大的粒子附近,對其他位置的粒子進行舍棄。為此使用上文中介紹的改進重采樣算法,綜合考慮各種不同域內權重的粒子來確定后續的粒子分布,使得粒子的多樣性增加,仿真結果如圖8所示。

圖7 采用原始RBPF算法濾波得到的目標估計軌跡

圖8 采用改進重采樣算法RBPF得到的目標估計軌跡
下面比較兩種濾波方法的估值與真值的差的均方根的變化情況,如圖9所示。

圖9 兩種算法濾波估值與真值的誤差均值比較
4 結論
為解決僅有角度測量信息的雷達雙目標跟蹤問題,在此對Rao-Blackwellized粒子濾波算法進行改進,為增加粒子的多樣性,解決濾波局部存在的不收斂問題,將重采樣算法進行改進,增加小權重粒子的比例,同時為獲得更高的濾波精度,采用交互多模型的方法對粒子的估值進行預測與更新,通過算法更改及數字仿真驗證可以看出,更改后濾波算法的收斂性更好且跟蹤精度更高。
[1]Kalman R E.A new Approach to Linear Filtering and Prediction Problems[J].Transactions of the ASME,Journal of Basic Engineering,1960,82(1):35-45.
[2]Sunahara Y.An Approximate Method of State Estimation for Nonlinear Dynamical Systems[J].Joint Automatic Control Conference,University of Colorado,1970,92(2):385-393.
[3]Julier S,Uhlman J.A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators[J].IEEE Transactions on Automatic Control,2000,45 (3):477-482.
[4]Oliver C,Simon JG,Eric M.An overview of existingmethods and recent advances in sequential Monte Carlo[J].Proceedings of the IEEE,2007,95(5):899-924.
[5]Gordon N,Salmond D.Novel approach to non-linear and non Gaussian Bayesian state estimation[J].Proceedings of Institute Electric Engineering,1993,140(2):107-113.
[6]Sarkka S,Vehtari A,Lampinen J.Rao-Blackwellized Particle Filter for Multiple Target Tracking[J].Information Fusion,2007,8(1):2-15.
(責任編輯周江川)
Target Track Based on Im proved Rao-Blackwellized Particle Filter Algorithm
ZHANGWan-li1,HE Jin-gang1,ZHAO Hong-mei2
(1.China Airborne Missile Academy,Luoyang 471009,China; 2.Luoyang Institute of Electro-Optical Equipment,AVIC,Luoyang 471009,China)
In radar signal processing field,moving target tracking is always the focus.And it involves the nonlinear filter problem which is the difficult point.In this paper,we focused on the radar target tracking problem based on the Rao-Blackwellized particle filter algorithm.To improve the convergence and the precision of the filter algorithm,resample algorithm in the RBPF algorithm is improved,which is validated by numerical simulation.The simulation result shows that RBPF algorithm is improved in every aspect.
particle filter;RBPF algorithm;radar target tracking;resample
:A
1006-0707(2014)07-0082-05
format:ZHANGWan-li,HE Jin-gang,ZHAO Hong-mei.Target Track Based on Improved Rao-Blackwellized Particle Filter Algorithm[J].Journal of Sichuan Ordnance,2014(7):82-86.
本文引用格式:張萬里,何金剛,趙紅梅.改進的Rao-Blackwellized粒子濾波算法在目標跟蹤中的應用[J].四川兵工學報,2014(7):82-86.
10.11809/scbgxb2014.07.024
2014-01-27
張萬里(1983—),男,工程師,主要從事導彈制導與控制、雷達信號處理研究。
TP277
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
