某鏈式炮隨動控制器設計與實現
2014-06-28 16:44:25雷凌毅向學輔姚毅魏正兵
兵器裝備工程學報 2014年7期
雷凌毅,向學輔,姚毅,魏正兵
(中國兵器工業第五八研究所,四川綿陽621000)
某鏈式炮隨動控制器設計與實現
雷凌毅,向學輔,姚毅,魏正兵
(中國兵器工業第五八研究所,四川綿陽621000)
鏈式炮隨動系統要求控制器具有高實時性和穩定性,設計一種基于雙DSP架構的隨動控制器,采用并行處理軟件提高系統實時性。針對指標對伺服系統性能要求,采用非線性前饋速度控制器控制隨動系統,試驗效果證明性能有較大提高。
鏈式炮;隨動控制;DSP
鏈式炮[1]隨動系統要求高實時性和穩定性,根據隨動控制系統信息流的特性,設計雙DSP控制器架構,采用并行處理模式,提高系統的實時性,有效地解決了單DSP控制器彈道解算[2,3]所花時間較長與實時控制周期較短之間所存在的矛盾問題。
1 隨動控制器總體設計
某鏈式炮隨動系統主要功能描述如下:操控臺輸出速度信號控制光電跟蹤轉臺搜索、跟蹤、瞄準目標,根據隨動控制器解算出目標在炮塔坐標系下坐標,控制鏈式炮炮塔運動,實現跟蹤和打擊目標功能。
鏈式炮隨動系統采用雙DSP架構作為控制器。DSP#1主要功能是采集與分析操控盒信號,控制光電跟蹤轉臺,控制炮塔隨動系統[4];DSP#2主要功能是采集與分析炮塔姿態角傳感器數據,接收各種系統指令信息以及狀態信息,進行彈道解算計算射擊諸元和裝表提前量等。2片DSP間通過CAN總線交互信息。
隨動控制器硬件主要由A/D轉換電路、調理濾波電路、CAN總線通信接口電路、RS422通信接口電路、I/O接口電路和DSP核心芯片等模塊組成。DSP核心芯片采用TI公司TMS320F28335控制芯片。控制器組成框圖如圖1所示。
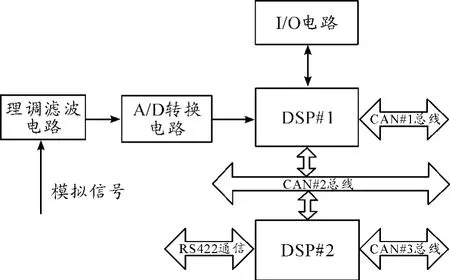
圖1 雙DSP架構框圖
2 硬件設計
2.1 A/D轉換電路設計
A/D轉換電路主要完成操控臺控制電壓信號的調理、轉換與采集。圖2為其原理框圖。

圖2 A/D轉換原理框圖
操控臺輸出信號經運算放大器INA114放大濾波后進入A/D轉換器進行模數轉換。前置運放INA114實現差分放大等功能。
AD轉換電路中采用AD公司生產的AD676模數轉換器將差分運算放大器放大調理后的模擬信號轉換成數字信號。AD676是一種16位并行輸出的模數轉換器,它利用開關電容充電再分配結構獲得高速轉換(轉換時間為10μs)的性能,并通過芯片自動校準電路進行非線性數字校正,使該器件總的性能達到優化。積分非線性誤差:0.001 56%,總諧波失真:0.002%。
2.2 數字信號處理電路
數字信號處理電路主要完成操控臺信號數據的采集、數據的轉換、控制火炮和光電跟蹤轉臺動作、處理光電跟蹤轉臺信息、通信數據的處理、彈道解算計算射擊諸元和裝表提前量等功能。
數字信號處理電路采用TMS320F28335 DSP作為運算處理的核心部件,該器件是一種低功耗的32位浮點數字信號處理器。它集中了數字信號處理的諸多優秀特性,具有精簡指令集(RISC)功能、微型控制結構、固件及工具裝置等。最快指令周期可達6.67 ns,可滿足隨動控制器運算控制要求;具有2個支持CAN總線2.0B協議的接口模塊,可同時作為2路節點接入不同的CAN總線上;3路SCI(UART)接口模塊,3個32位CPU時鐘定時器;88個共享通用輸入輸出接口。
2.3 外部通信接口電路
隨動控制器具有3路CAN總線接口[5]。CAN#1總線接口與光電跟蹤轉臺、火炮伺服驅動器和火炮位置編碼器接在同一條總線上,用于傳輸伺服控制信息;CAN#2總線接口用于DSP#1與DSP#2內部數據交互,傳輸光電跟蹤轉臺和火炮位置編碼器信息。CAN#3用于傳輸炮塔姿態角傳感器數據等信息。
CAN總線外圍接口采用電壓隔離模塊B0505LD、高速雙通道隔離器IL712與CAN總線收發器82C250組合的方式完成設計。IL712傳輸速度可達150 Mbps,傳播延遲為10ns。在82C250與CAN總線的接口部分采用了一定的安全和抗干擾措施。82C250的CANH和CANL引腳各自通過一個5.1Ω的電阻與CAN總線相連,電阻可起到一定的限流作用,保護82C250免受過流的沖擊。CANH和CANL與地之間并聯了2個30 pF的小電容,可以起到濾除總線上高頻干擾的作用,并具有一定的防電磁輻射的能力。圖3所示為單路CAN總線接口電路原理圖。
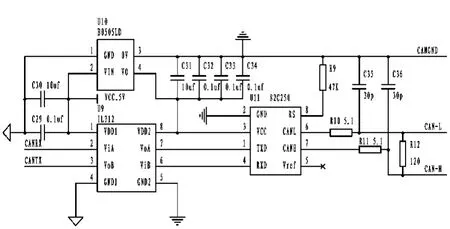
圖3 CAN總線接口電路原理
RS422通信接口電路主要用于接收系統各種指令信息以及狀態信息。
RS422通信接口電路采用電壓隔離模塊B0505LD和NVE公司的IL422芯片組合的方式完成設計。IL422具有25Mbps傳輸速度、25ns傳輸延遲,可用于現場電磁環境比較復雜的長距離總線中。圖4為RS422通信接口外圍電路原理圖。
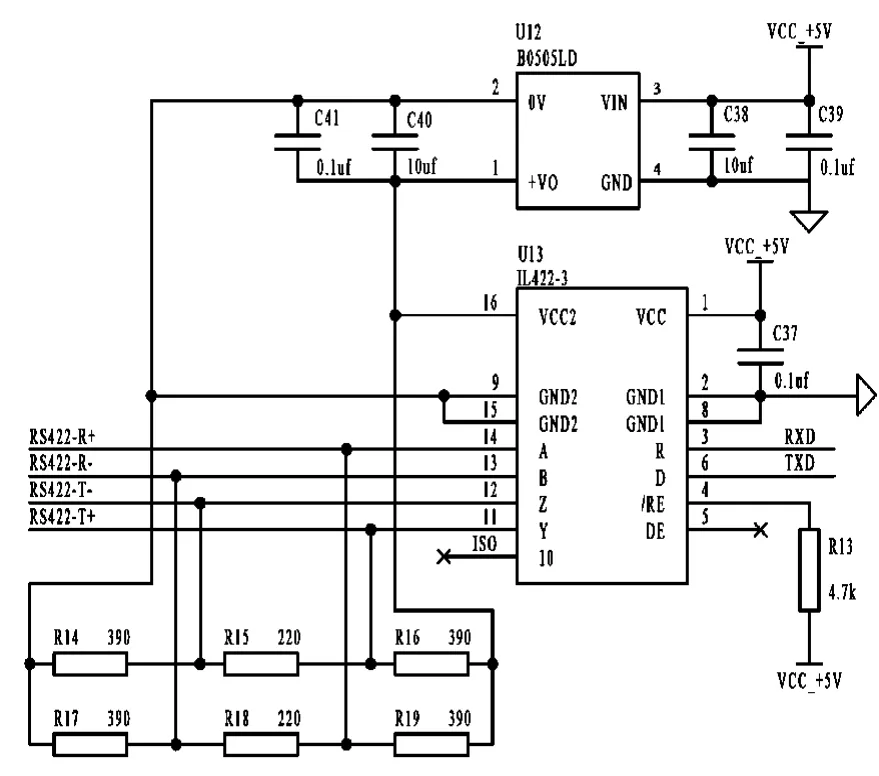
圖4 RS422通信接口電路原理
2.4 I/O接口電路
I/O接口電路主要用于完成火炮各個安全連鎖開關信號采集與開關控制量輸出,采用光隔TLP185芯片對輸入輸出信號進行隔離控制,保護TMS320F28335芯片I/O接口不被損壞。
3 軟件設計
3.1 軟件架構設計
隨動控制器具有2個DSP軟件模塊,采用并行處理模式,獨立運行于2片DSP中。DSP#1與DSP#2軟件模塊之間通過CAN#2總線交互數據。
DSP#1運行軟件主要由DSP接口初始化、操控臺控制信號采集與處理、穩定工況工作、CAN總線通信等模塊構成,其主要工作流程如圖5所示。
DSP#2運行軟件主要由DSP接口初始化、彈道解算計算射擊諸元和裝表提前量、CAN總線通信、RS422通信等模塊構成,其主要工作流程如圖6所示。

圖5 DSP#1軟件工作流程

圖6 DSP#2軟件工作流程
3.2 非線性前饋隨動控制器設計
某鏈式炮隨動控制系統控制炮塔跟隨光電轉臺運動跟蹤打擊目標,需要隨動系統具有較高的動態特性和穩態精度[6-8];系統采用非線性前饋速度隨動控制器控制系統運動,其模型如圖7所示。

圖7 非線性前饋控制器框圖

其中ε由系統實際調試確定。選擇速度環控制器中Kvr= 9.05、τvr1=0.001和τvr2=0.001 025將速度環等效為慣性環節

其中:τvc=0.015 9;速度環帶寬Bvc>10 Hz。在不考慮前饋器時,位置環開環傳遞函數為

將Gvc代入式(3),可得,設計位置環控制器,則當輸入信號為加速度信號時,系統穩態誤差為
當選擇Kbf=k=1時,位置環開環傳遞函數Gpo等效為Ⅲ型系統,當輸入信號為加速度信號時,系統穩態誤差ess=0。位置環閉環傳遞函數為

當選擇Kpr=5,τpr=2時,不加前饋與加前饋控制系統閉環傳遞函數幅頻特性曲線如圖8所示,虛線描述不加前饋,實線描述加前饋的系統。加前饋后提高系統帶寬,從原系統101.0rad/s提高到101.8rad/s,動態性能得到很大提高。
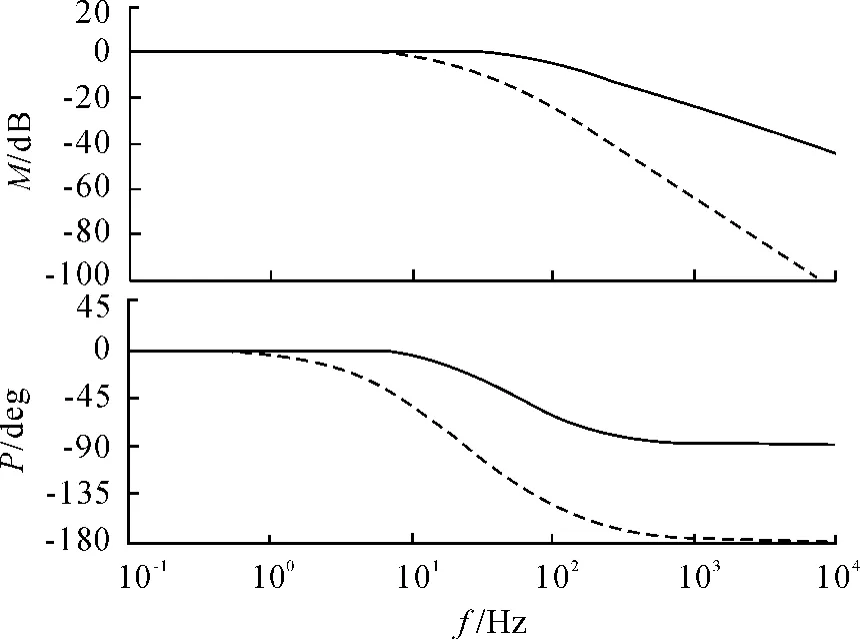
圖8 閉環幅頻特性曲線對比
在實際系統中,選擇位置輸入信號θi=45°×sin(1× t),即最大速度θ·max=45°/s,最大加速度θ¨max=45°/s2。設計ε=0.6°/s,位置環控制周期為5 ms。跟蹤誤差曲線如圖9所示,虛線描述不加前饋,實線描述加前饋的系統。不加前饋跟蹤最大誤差為0.32°,加前饋后跟蹤誤差小于0.06°,性能得到明顯提升。

圖9 跟蹤誤差曲線
4 結論
鏈式炮隨動控制器采用雙DSP架構,運算速度快,能明顯提升系統的實時性,采用前饋隨動控制器作為隨動控制器能有效提高系統的控制性能。目前,此設計方案已成功應用于某鏈式炮火控系統中,效果顯著,對其他火炮控制系統設計具有一定的參考意義。
[1]趙文彬,張銘,秦鵬飛,等.鏈式炮PMSM電機轉速自適應反演控制[J].兵工自動化,2011,30(11):57-62.
[2]薄煜明,郭治,錢龍軍,等.現代火控理論與應用基礎[M].北京:科學出版社,2012.
[3]馮長根,溫波,李才葆.自行火炮行進間射擊動力學研究[J].兵工學報,2002,23(4):457-461.
[4]黃麗娟,程治新.基于DSP的自行火炮數字交流隨動系統設計[J].四川兵工學報,2013,34(2):48-58.
[5]姜少飛,閆英敏.基于DSP和CAN總線的火炮隨動系統性能測試[J].四川兵工學報,2009,30(11):39-41,52.
[6]羅兵,黃國忠.行進間瞄準線穩定技術[J].中國慣性技術學報,2004,12(2):9-12.
[7]王連明.機載光電的穩定與跟蹤伺服控制[D].吉林:中國科學院長春光學精密機械與物理研究所,2002.
[8]何永昌,王雷,韓昭旺.基于艦體坐標系的瞄準線與火力線穩定模型[J].火炮發射與控制學報,2008,24(2):24-27.
(責任編輯楊繼森)
Design and Im plementation of Chain Gun Servo Controller
LEILing-yi,XIANG Xue-fu,YAO Yi,WEIZheng-bing
(No.58 Research Institute of China Ordnance Industries,Mianyang 621000,China)
Chain gun servo system requires controller is of high real time and stability.This paper designed a kind of servo controller based on dual DSP architecture,using parallel processing software to improve the system in real time.For indicators of servo system performance requirements,the system used speed controller with nonlinear feed forward.Experimental results demonstrate the performance has improved greatly.
chain gun;servo control;DSP
:A
1006-0707(2014)07-0079-04
format:LEI Ling-yi,XIANG Xue-fu,YAO Yi,et al.Design and Implementation of Chain Gun Servo Controller[J].Journal of Sichuan Ordnance,2014(7):79-81.
本文引用格式:雷凌毅,向學輔,姚毅,等.某鏈式炮隨動控制器設計與實現[J].四川兵工學報,2014(7):79-81.
10.11809/scbgxb2014.07.023
2014-03-09
雷凌毅(1979—),男,碩士,工程師,主要從事嵌入式系統設計與控制研究。
TJ3
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
